【Overload游戏引擎细节分析】PBR材质Shader---完结篇
PBR基于物理的渲染可以实现更加真实的效果,其Shader值得分析一下。但PBR需要较多的基础知识,不适合不会OpenGL的朋友。
一、PBR理论
PBR指基于物理的渲染,其理论较多,需要的基础知识也较多,我在这就不再写一遍了,具体可以参看:
LearnOpenGL PBR理论-英文 或者 LearnOpenGL PBR理论-中文
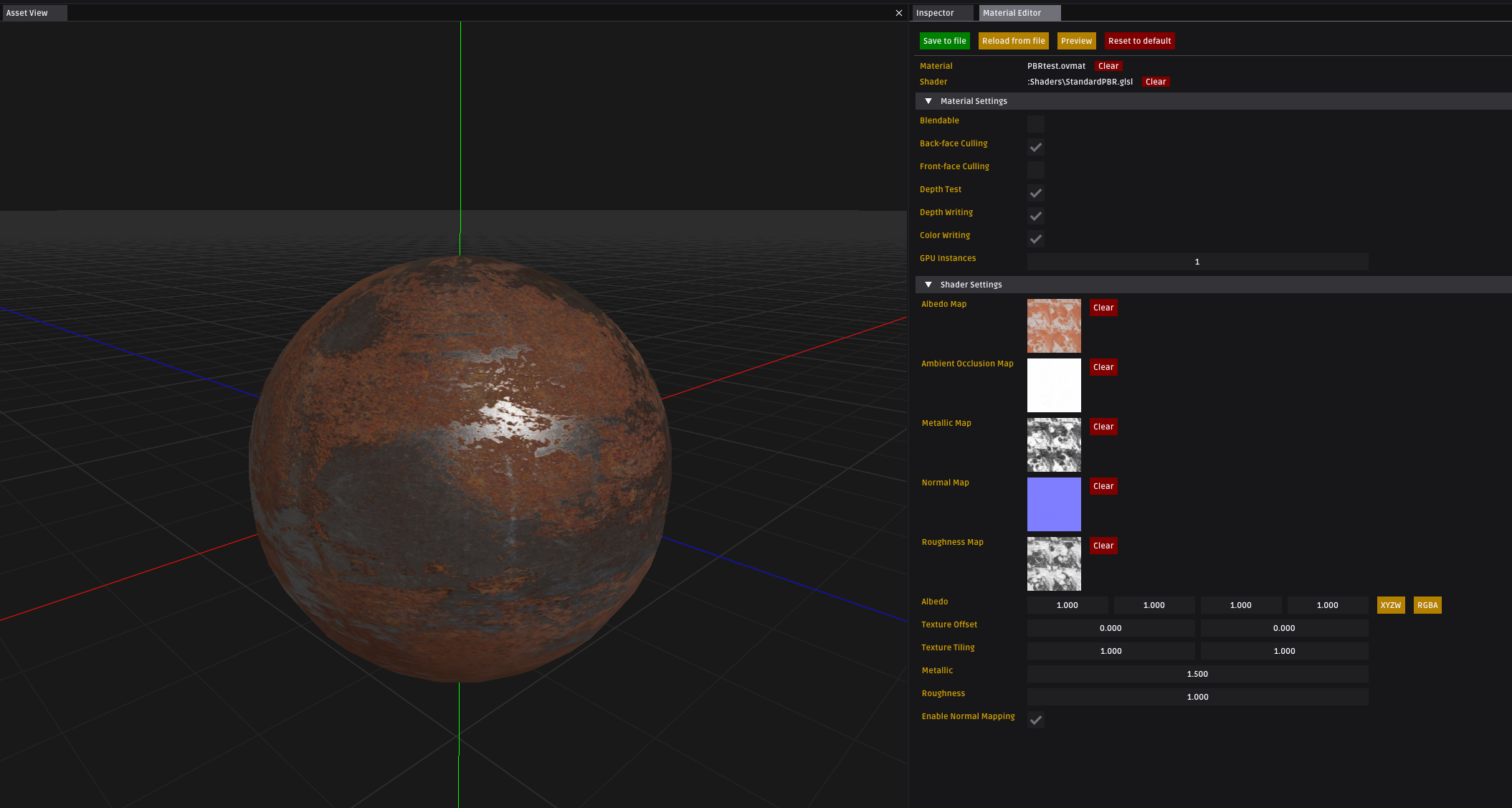
Overload也提供了这种材料,借助贴图可以实现非常真实的材质效果。下面这个例子的贴图来自LearnOpenGL,大家可以自己去下载。
二、PBR Shader分析
顶点着色器
#shader vertex
#version 430 corelayout (location = 0) in vec3 geo_Pos;
layout (location = 1) in vec2 geo_TexCoords;
layout (location = 2) in vec3 geo_Normal;
layout (location = 3) in vec3 geo_Tangent;
layout (location = 4) in vec3 geo_Bitangent;/* Global information sent by the engine */
layout (std140) uniform EngineUBO
{mat4 ubo_Model;mat4 ubo_View;mat4 ubo_Projection;vec3 ubo_ViewPos;float ubo_Time;
};/* Information passed to the fragment shader */
out VS_OUT
{vec3 FragPos;vec3 Normal;vec2 TexCoords;mat3 TBN;flat vec3 TangentViewPos;vec3 TangentFragPos;
} vs_out;void main()
{vs_out.TBN = mat3(normalize(vec3(ubo_Model * vec4(geo_Tangent, 0.0))),normalize(vec3(ubo_Model * vec4(geo_Bitangent, 0.0))),normalize(vec3(ubo_Model * vec4(geo_Normal, 0.0))));mat3 TBNi = transpose(vs_out.TBN);vs_out.FragPos = vec3(ubo_Model * vec4(geo_Pos, 1.0));vs_out.Normal = normalize(mat3(transpose(inverse(ubo_Model))) * geo_Normal);vs_out.TexCoords = geo_TexCoords;vs_out.TangentViewPos = TBNi * ubo_ViewPos;vs_out.TangentFragPos = TBNi * vs_out.FragPos;gl_Position = ubo_Projection * ubo_View * vec4(vs_out.FragPos, 1.0);
}顶点着色器基本与standard材质一致,这里就不再分析了,具体可看standard材质Shader
片元着色器:
#shader fragment
#version 430 core/** 模型视图矩阵、摄像机位置,使用UBO传入 */
/* Global information sent by the engine */
layout (std140) uniform EngineUBO
{mat4 ubo_Model;mat4 ubo_View;mat4 ubo_Projection;vec3 ubo_ViewPos;float ubo_Time;
};/* 顶点着色器的输出 */
/* Information passed from the fragment shader */
in VS_OUT
{vec3 FragPos;vec3 Normal;vec2 TexCoords;mat3 TBN;flat vec3 TangentViewPos;vec3 TangentFragPos;
} fs_in;/* 光源数据用SSBO传入 */
/* Light information sent by the engine */
layout(std430, binding = 0) buffer LightSSBO
{mat4 ssbo_Lights[];
};out vec4 FRAGMENT_COLOR;uniform sampler2D u_AlbedoMap; // 反照率贴图
uniform sampler2D u_MetallicMap; // 金属度贴图
uniform sampler2D u_RoughnessMap; // 粗糙度贴图
uniform sampler2D u_AmbientOcclusionMap; // 环境光遮蔽贴图
uniform sampler2D u_NormalMap; // 法线贴图
uniform vec4 u_Albedo = vec4(1.0); // 反照率系数,控制反照率贴图的权重
uniform vec2 u_TextureTiling = vec2(1.0, 1.0);
uniform vec2 u_TextureOffset = vec2(0.0, 0.0);
uniform bool u_EnableNormalMapping = false; // 是否使用法线贴图
uniform float u_HeightScale = 0.0;
uniform float u_Metallic = 1.0; // 金属度
uniform float u_Roughness = 1.0; // 粗糙度const float PI = 3.14159265359;// 计算法向分布函数D,使用Trowbridge-Reitz GGX
float DistributionGGX(vec3 N, vec3 H, float roughness)
{float a = roughness*roughness;float a2 = a*a;float NdotH = max(dot(N, H), 0.0);float NdotH2 = NdotH*NdotH;float num = a2;float denom = (NdotH2 * (a2 - 1.0) + 1.0);denom = PI * denom * denom;return num / denom;
}float GeometrySchlickGGX(float NdotV, float roughness)
{float r = (roughness + 1.0);float k = (r*r) / 8.0;float num = NdotV;float denom = NdotV * (1.0 - k) + k;return num / denom;
}// Smith’s method
float GeometrySmith(vec3 N, vec3 V, vec3 L, float roughness)
{float NdotV = max(dot(N, V), 0.0);float NdotL = max(dot(N, L), 0.0);float ggx2 = GeometrySchlickGGX(NdotV, roughness);float ggx1 = GeometrySchlickGGX(NdotL, roughness);return ggx1 * ggx2;
}// 菲涅尔项,使用Fresnel-Schlick方程
vec3 fresnelSchlick(float cosTheta, vec3 F0)
{return F0 + (1.0 - F0) * pow(1.0 - cosTheta, 5.0);
}/* 将32位数字变成RGBA颜色 */
vec3 UnPack(float p_Target)
{return vec3(// CPU传入的数据是0-255,转换成0-1.0float((uint(p_Target) >> 24) & 0xff) * 0.003921568627451,float((uint(p_Target) >> 16) & 0xff) * 0.003921568627451,float((uint(p_Target) >> 8) & 0xff) * 0.003921568627451);
}bool PointInAABB(vec3 p_Point, vec3 p_AabbCenter, vec3 p_AabbHalfSize)
{return(p_Point.x > p_AabbCenter.x - p_AabbHalfSize.x && p_Point.x < p_AabbCenter.x + p_AabbHalfSize.x &&p_Point.y > p_AabbCenter.y - p_AabbHalfSize.y && p_Point.y < p_AabbCenter.y + p_AabbHalfSize.y &&p_Point.z > p_AabbCenter.z - p_AabbHalfSize.z && p_Point.z < p_AabbCenter.z + p_AabbHalfSize.z);
}/*光照衰减系数,LearnOpenGL中有具体公式*/
float LuminosityFromAttenuation(mat4 p_Light)
{const vec3 lightPosition = p_Light[0].rgb;const float constant = p_Light[0][3];const float linear = p_Light[1][3];const float quadratic = p_Light[2][3];const float distanceToLight = length(lightPosition - fs_in.FragPos);const float attenuation = (constant + linear * distanceToLight + quadratic * (distanceToLight * distanceToLight));return 1.0 / attenuation;
}/* 盒状环境光 */
vec3 CalcAmbientBoxLight(mat4 p_Light)
{const vec3 lightPosition = p_Light[0].rgb;const vec3 lightColor = UnPack(p_Light[2][0]);const float intensity = p_Light[3][3];const vec3 size = vec3(p_Light[0][3], p_Light[1][3], p_Light[2][3]);return PointInAABB(fs_in.FragPos, lightPosition, size) ? lightColor * intensity : vec3(0.0);
}/* 球状环境光 */
vec3 CalcAmbientSphereLight(mat4 p_Light)
{const vec3 lightPosition = p_Light[0].rgb;const vec3 lightColor = UnPack(p_Light[2][0]);const float intensity = p_Light[3][3];const float radius = p_Light[0][3];return distance(lightPosition, fs_in.FragPos) <= radius ? lightColor * intensity : vec3(0.0);
}void main()
{vec2 texCoords = u_TextureOffset + vec2(mod(fs_in.TexCoords.x * u_TextureTiling.x, 1), mod(fs_in.TexCoords.y * u_TextureTiling.y, 1));vec4 albedoRGBA = texture(u_AlbedoMap, texCoords) * u_Albedo; // Albedo反照率贴图数据vec3 albedo = pow(albedoRGBA.rgb, vec3(2.2)); // 这种反照率处理方式与LearOpenGL一致float metallic = texture(u_MetallicMap, texCoords).r * u_Metallic; // 金属度float roughness = texture(u_RoughnessMap, texCoords).r * u_Roughness; // 粗糙度float ao = texture(u_AmbientOcclusionMap, texCoords).r; // 环境光遮蔽AOvec3 normal;if (u_EnableNormalMapping) // 是否使用法线贴图{normal = texture(u_NormalMap, texCoords).rgb; // 法线贴图的原始值normal = normalize(normal * 2.0 - 1.0); // 法线贴图矢量坐标范围变成-1到1normal = normalize(fs_in.TBN * normal); // 变换到全局坐标系下}else{normal = normalize(fs_in.Normal); // 使用顶点着色器输出的法线}vec3 N = normalize(normal); vec3 V = normalize(ubo_ViewPos - fs_in.FragPos); // 计算视线方向vec3 F0 = vec3(0.04); F0 = mix(F0, albedo, metallic); // 插值方式得到平面的基础反射率F0// reflectance equationvec3 Lo = vec3(0.0);vec3 ambientSum = vec3(0.0); // 环境光结果for (int i = 0; i < ssbo_Lights.length(); ++i) {// 两种环境光灯光if (int(ssbo_Lights[i][3][0]) == 3){ambientSum += CalcAmbientBoxLight(ssbo_Lights[i]);}else if (int(ssbo_Lights[i][3][0]) == 4){ambientSum += CalcAmbientSphereLight(ssbo_Lights[i]);}else{// calculate per-light radiance// 光源方向vec3 L = int(ssbo_Lights[i][3][0]) == 1 ? -ssbo_Lights[i][1].rgb : normalize(ssbo_Lights[i][0].rgb - fs_in.FragPos);vec3 H = normalize(V + L);// 半程向量float distance = length(ssbo_Lights[i][0].rgb - fs_in.FragPos);float lightCoeff = 0.0; // 最终到片元处的光强系数 switch(int(ssbo_Lights[i][3][0])){case 0:lightCoeff = LuminosityFromAttenuation(ssbo_Lights[i]) * ssbo_Lights[i][3][3]; // 点光源要考虑随距离衰减break;case 1:lightCoeff = ssbo_Lights[i][3][3]; // 方向光无衰减break;// 聚光灯的计算case 2:const vec3 lightForward = ssbo_Lights[i][1].rgb;const float cutOff = cos(radians(ssbo_Lights[i][3][1]));const float outerCutOff = cos(radians(ssbo_Lights[i][3][1] + ssbo_Lights[i][3][2]));const vec3 lightDirection = normalize(ssbo_Lights[i][0].rgb - fs_in.FragPos);const float luminosity = LuminosityFromAttenuation(ssbo_Lights[i]);/* Calculate the spot intensity */const float theta = dot(lightDirection, normalize(-lightForward)); const float epsilon = cutOff - outerCutOff;const float spotIntensity = clamp((theta - outerCutOff) / epsilon, 0.0, 1.0);lightCoeff = luminosity * spotIntensity * ssbo_Lights[i][3][3];break;}vec3 radiance = UnPack(ssbo_Lights[i][2][0]) * lightCoeff;// cook-torrance brdffloat NDF = DistributionGGX(N, H, roughness); // 法线分布函数float G = GeometrySmith(N, V, L, roughness); // 几何函数vec3 F = fresnelSchlick(max(dot(H, V), 0.0), F0); // 菲涅尔项vec3 kS = F;vec3 kD = vec3(1.0) - kS;kD *= 1.0 - metallic;vec3 numerator = NDF * G * F;float denominator = 4.0 * max(dot(N, V), 0.0) * max(dot(N, L), 0.0);vec3 specular = numerator / max(denominator, 0.001);// add to outgoing radiance Lofloat NdotL = max(dot(N, L), 0.0);Lo += (kD * albedo / PI + specular) * radiance * NdotL; }}vec3 ambient = ambientSum * albedo * ao;// 环境光最终贡献vec3 color = ambient + Lo; // 环境光与cook-torrance模型累加// HDR色调映射color = color / (color + vec3(1.0));// gamma 矫正color = pow(color, vec3(1.0/2.2)); FRAGMENT_COLOR = vec4(color, albedoRGBA.a); // alpha使用反照率贴图
}
Fragment Shader大体分为三部分:
- 从贴图中获取反照率、金属度、粗糙度、法线数据
- 计算灯光光照,环境光灯光只影响环境光;方向光、聚光灯、点光源会影响光强lightCoeff,最终的光照使用cook-torrance模型进行计算,公式可以参考LearnOpenGL
- 最后进行环境光与PBR模型结果进行叠加,并进行色调映射与gamma矫正,这里使用的公式在LearnOpenGL中都有的
总结:
这个PBR Shader整体上与LearnOpenGL中的理论一致,看完LearnOpenGL之后再看这个Shader就比较简单了。
完结总结:
写的这里,这个专栏暂时告一段落了,主要分析了Overload的Render模块,其他的包括UI、物理引擎、音频等模块没有涉及。Overload是一个Demo性质的游戏引擎,其渲染涉只涉及最基础的渲染方式,是对OpenGL简单封装,远远满足不了实际游戏开发需求,只能作为渲染引擎入门。
另外,这个专栏的文章只聚焦一些细节,对应架构涉及很少,因为本人发现架构方面的文章参考性不大,一旦一个软件定型架构方面的改动很困难,读了软件架构的文章也很难在工作中用上。故单纯只介绍一个技术点反而可能拿来直接使用。最后希望能对大家有所帮助!
相关文章:
【Overload游戏引擎细节分析】PBR材质Shader---完结篇
PBR基于物理的渲染可以实现更加真实的效果,其Shader值得分析一下。但PBR需要较多的基础知识,不适合不会OpenGL的朋友。 一、PBR理论 PBR指基于物理的渲染,其理论较多,需要的基础知识也较多,我在这就不再写一遍了&…...
C++设计模式_18_State 状态模式
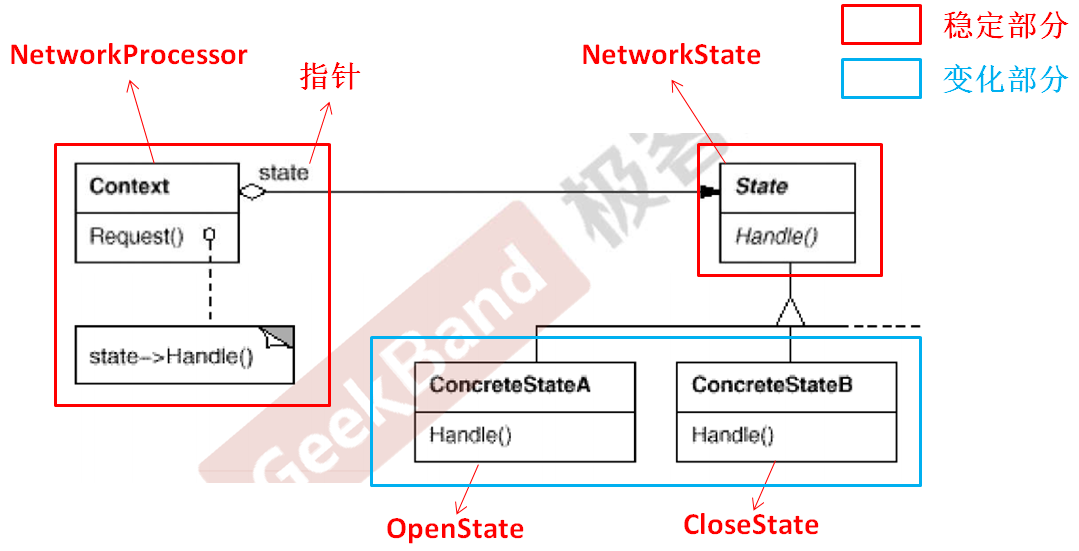
State和Memento被归为“状态变化”模式。 文章目录 1. “状态变化”模式1.1 典型模式 2. 动机 (Motivation)3. 代码演示State 状态模式3.1 常规方式3.2 State 状态模式 4. 模式定义5. 结构( Structure )6. 要点总结7. 其他参考 1. “状态变化”模式 在组件构建过程中…...
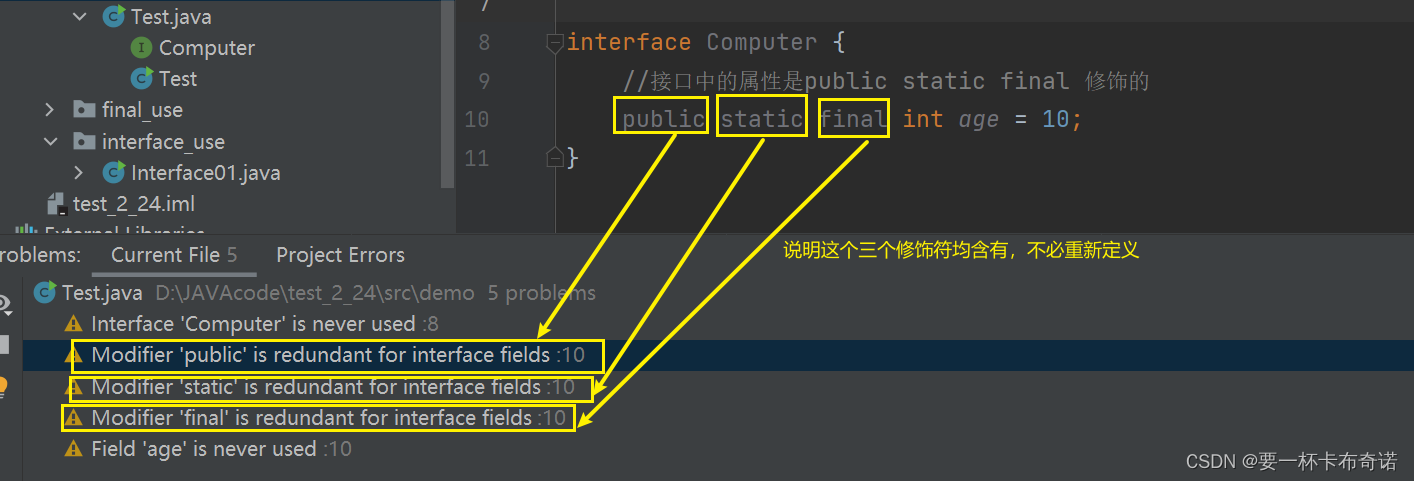
详解final, abstract, interface关键字
一.final关键字 1.final关键字介绍 ——final关键字可以去修饰类、方法、属性和局部变量 2.final关键字的作用 1)final修饰类,这个类不能被其他类继承 2)final修饰方法,方法不能被重写 3)final修饰属性,属…...

统计特殊四元组
题记: 给你一个 下标从 0 开始 的整数数组 nums ,返回满足下述条件的 不同 四元组 (a, b, c, d) 的 数目 : nums[a] nums[b] nums[c] nums[d] ,且a < b < c < d 示例 1: 输入: nums [1,2,3…...

腾讯云轻量应用服务器“镜像”怎么选择合适?
腾讯云轻量应用服务器镜像怎么选择?如果是用来搭建网站可以选择宝塔Linux面板腾讯云专享版,镜像系统根据实际使用来选择,腾讯云百科txybk.com来详细说下腾讯云轻量应用服务器镜像的选择方法: 腾讯云轻量应用服务器镜像选择 轻量…...

Ruby模块和程序组织
和类一样,模块是一组方法和常量的集合。 和类不同,模块没有实例,取而代之的是可以将特殊模块的功能添加到一个类或者指定对象之中。 Class类是Module类的一个子类,因此每一个类对象也是一个模块对象 一、模块创建和基础应用 编写…...

14、SpringCloud -- WebSocket 实时通知用户
目录 实时通知用户需求:代码:前端:后端:WebSocket创建 websocket-server 服务添加依赖:配置 yml 和 启动类:前端:后端代码:注意:测试:总结:实时通知用户 需求: 用户订单秒杀成功之后,对用户进行秒杀成功通知。 弹出个提示框来提示。 代码: 前端:...
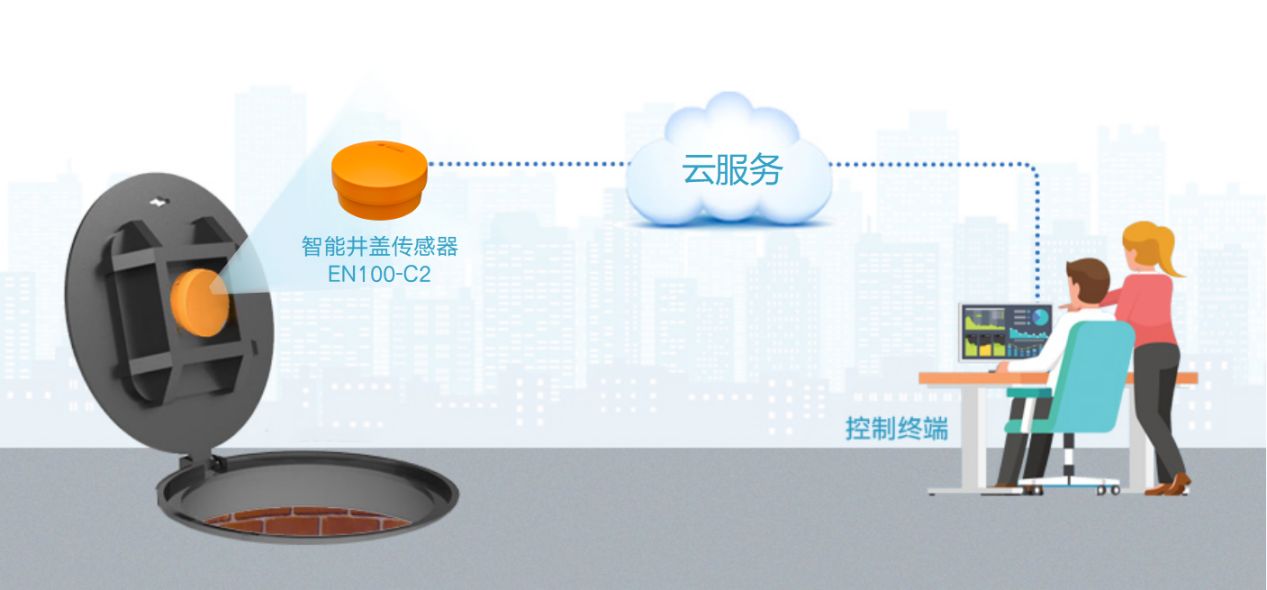
智能井盖传感器推荐,万宾科技助力城市信息化建设
随着科技产品更新换代进程加快,人工智能在人们日常生活之中逐渐普及开来,深入人们生活的方方面面,影响城市基础设施建设工程。例如在大街小巷之中的井盖作为城市基础建设的一个重要部分,一旦出现松动倾斜或凸起等异常问题…...
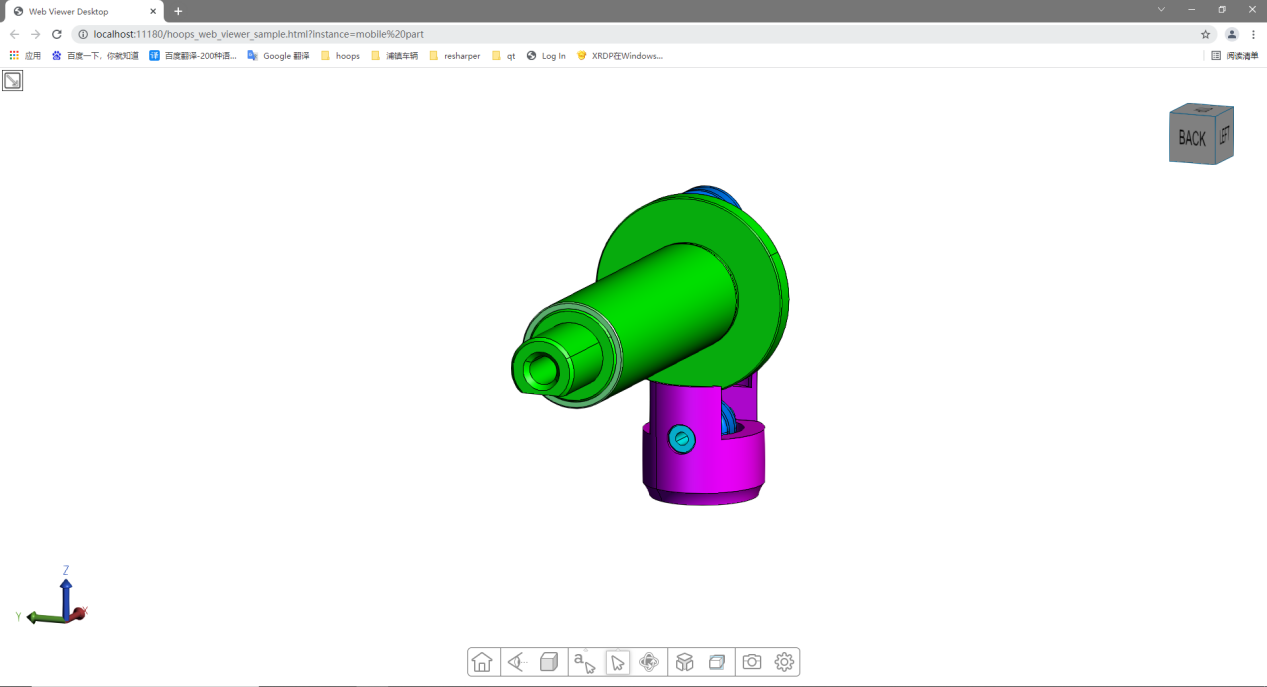
3D模型格式转换工具HOOPS Exchange对工业级3D产品HOOPS的支持与应用
一、概述 HOOPS Exchange是一套高性能模型转换软件库,可以给软件提供强大的模型的导入和导出功能,我们可以将其单独作为转换工具使用,也可以将其集成到自己的软件中。 同样,HOOPS 的其它产品,也离不开HOOPS Exchange…...
table 表体滚动, 表头、表尾固定
在开发报表中,如果报表数据行过多页面无法全部显示,或者内容溢出div,需要把表头和表尾固定表体滚动这样就可以在页面上全部显示,并且不会溢出div 效果:最终实现效果 代码:<!DOCTYPE html> <html&g…...
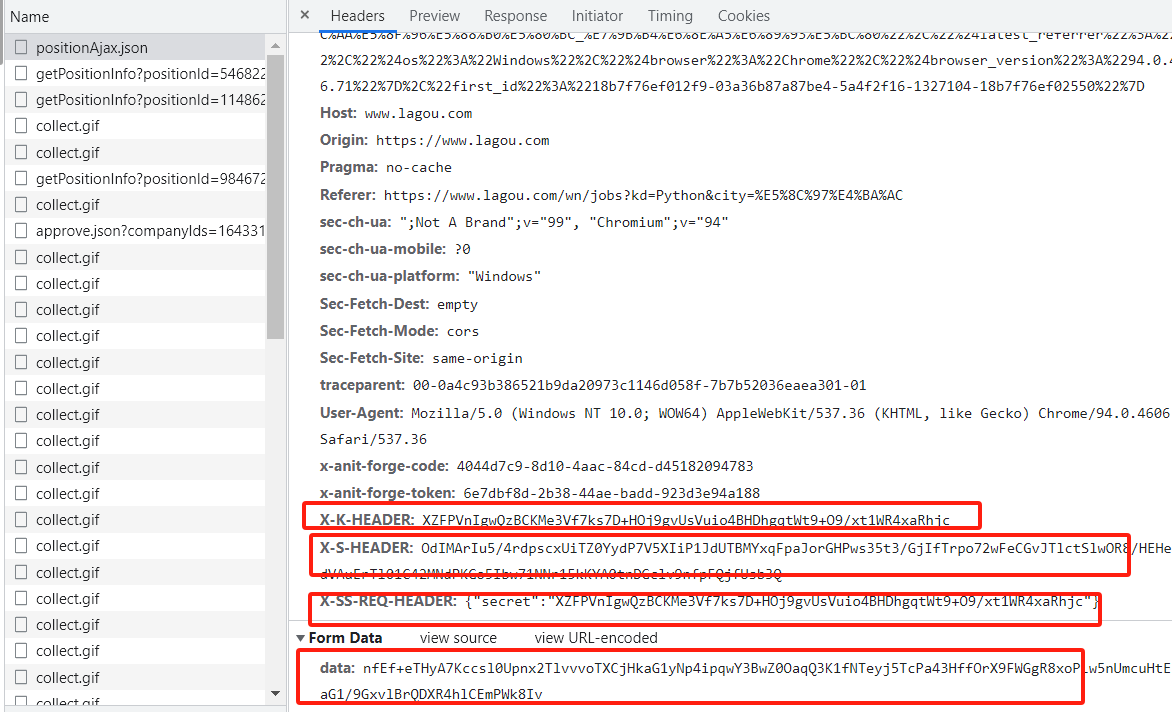
第57篇-某钩招聘网站加密参数分析【2023-10-31】
声明:该专栏涉及的所有案例均为学习使用,严禁用于商业用途和非法用途,否则由此产生的一切后果均与作者无关!如有侵权,请私信联系本人删帖! 文章目录 一、前言二、网站分析1.X-S-HEADER参数2.请求参数data3.响应机密值data一、前言 网址: aHR0cHM6Ly93d3cubGFnb3UuY29t…...
C语言数据结构之数据结构入门
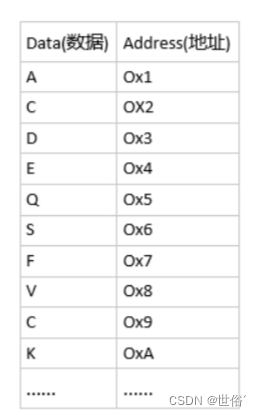
目录 数据结构介绍 数据结构发展史 何为算法 数据结构基础 基本概念和术语 四大逻辑结构(Logic Structure) 数据类型 理解复杂度概念 时间空间复杂度定义 度量时间复杂度的方法 程序运行时的内存与地址 编程预备 数据结构介绍 数据结构发展…...
如何知道服务器的某个端口是否打开
1、telnet 命令:telnet ip port,port即端口,我们一般最常见的命令就是telnet,但是telnet使用的是tcp协议,换句话说telnet只能检测tcp的这个端口打开了没 若是端口打开,会出现下列信息 失败的是这个 如…...

【ICCV‘23】One-shot Implicit Animatable Avatars with Model-based Priors
文章目录 前置知识 前置知识 1)SMPL模型 \quad SMPL这类方法只建模穿很少衣服的人体(裸体模型),它只能刻画裸体角色的动画,并不能刻画穿衣服的人体的动画 2)data-efficient \quad 这个词推荐用ÿ…...
关于息肉检测和识别项目的总结
前言 整体的思路:首先息肉数据集分为三类: 1.正常细胞 2. 增生性息肉 3. 肿瘤要想完成这个任务,首先重中之重是分割任务,分割结果的好坏, 当分割结果达到一定的准确度后,开始对分割后的结果进行下游分类…...

Jetson Xavier NX FFmpeg支持硬件编解码
最近在用Jetson Xavier NX板子做视频处理,但是CPU进行视频编解码,效率比较地下。 于是便考虑用硬解码来对视频进行处理。 通过jtop查看,发现板子是支持 NVENC硬件编解码的。 1、下载源码 因为需要对ffmpeg进行打补丁修改,因此需要编译两份源码 1.1、编译jetson-ffmpeg …...

518抽奖软件,为什么说比别的抽奖软件更美观精美?
518抽奖软件简介 518抽奖软件,518我要发,超好用的年会抽奖软件,简约设计风格。 包含文字号码抽奖、照片抽奖两种模式,支持姓名抽奖、号码抽奖、数字抽奖、照片抽奖。(www.518cj.net) 精致美观功能 字体平滑无锯齿图片放大后清晰…...

React的组件学习
React的组件学习 参考资料:https://zh-hans.react.dev/learn/your-first-component 一、定义组件 export default function Profile() {return (<imgsrc"https://i.imgur.com/MK3eW3Am.jpg"alt"Katherine Johnson"/>) }以下是构建组件…...
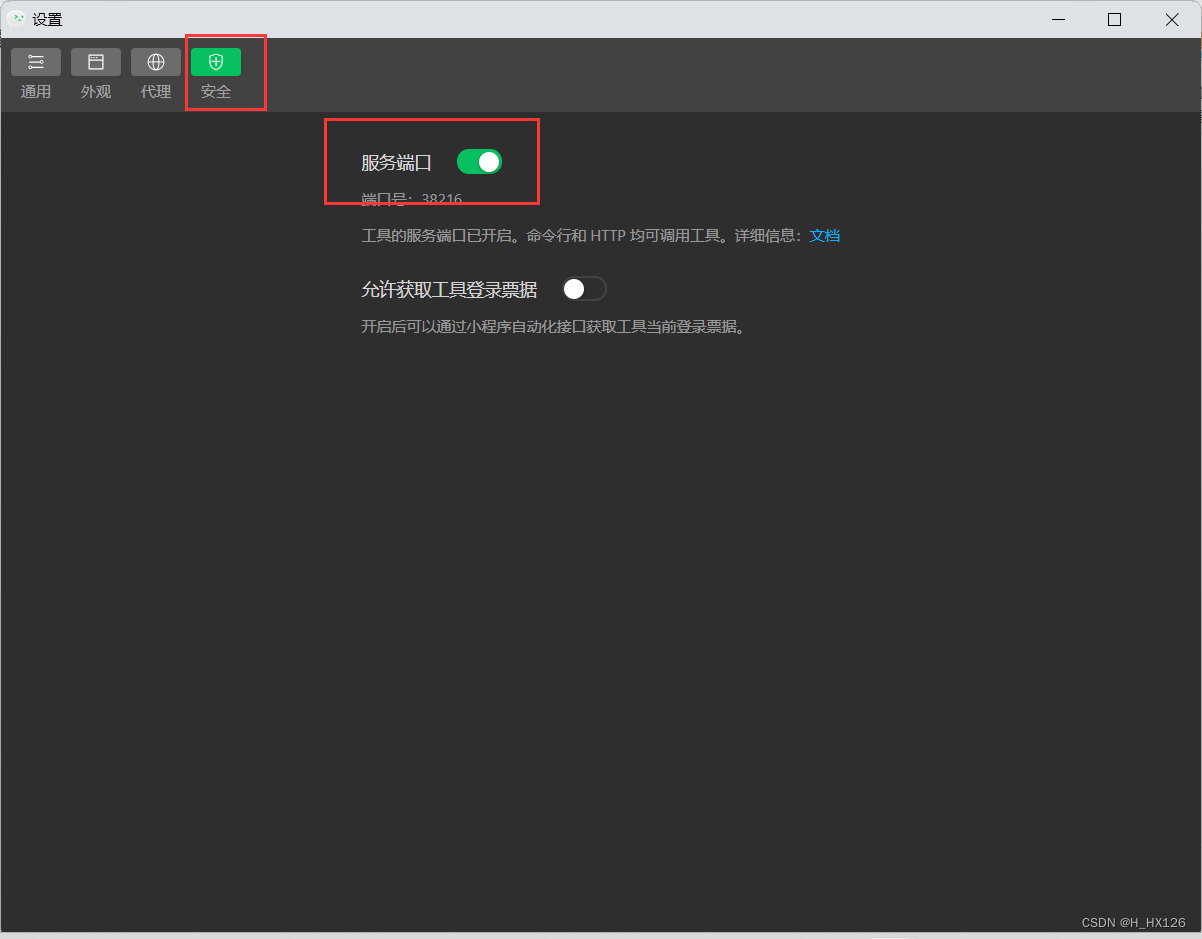
uni-app配置微信开发者工具
一、配置微信开发者工具路径 工具->设置->运行配置->小程序运行配置->微信开发者工具路径 二、微信开发者工具开启服务端口...

肺癌不再是老年病:33岁作家的离世引发关注,有这些情况的请注意
近期,90后网络小说家七月新番和26岁男艺人蒋某某因肺癌去世,引发关注。他们都没有吸烟习惯,那么他们为什么会得肺癌呢?浙大二院呼吸内科副主任医师兰芬说,现在年轻人熬夜、加班导致身体过劳,在劳累情况下身…...

从内存条到手机主板:盘点不同场景下过孔尺寸选择的实战经验与避坑指南
从内存条到手机主板:不同场景下过孔尺寸选择的实战经验与避坑指南 在高速PCB设计中,过孔的选择往往被工程师视为"细节问题",但正是这些看似微小的设计决策,决定了产品的信号完整性、电源完整性和最终可靠性。从内存条的…...
)
别再只会用HAL库了!手把手教你用寄存器操作STM32的SysTick定时器(附精准延时函数)
深入STM32 SysTick定时器:寄存器级精准延时实战指南 从库函数到寄存器:为什么需要更底层的控制? 在嵌入式开发领域,时间控制精度往往决定着系统性能的上限。许多开发者习惯使用HAL库或标准库提供的延时函数,却很少思考…...

Zephyr启动流程的“模块化”设计哲学:从链接脚本到设备树的初始化链条解析
Zephyr启动流程的模块化设计哲学:从链接脚本到设备树的初始化链条解析 在嵌入式系统开发中,实时操作系统(RTOS)的启动流程往往是系统可靠性的第一道门槛。Zephyr RTOS以其独特的模块化设计理念,构建了一套高度可配置、可扩展的初始化体系&…...

在OpenClaw项目中接入Taotoken实现多模型Agent工作流
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在OpenClaw项目中接入Taotoken实现多模型Agent工作流 对于使用OpenClaw框架构建智能体工作流的开发者而言,如何稳定、灵…...

别再手动搬虚拟机了!手把手教你配置vSphere DRS集群,实现ESXi主机负载自动均衡
企业级虚拟化资源调度实战:vSphere DRS集群的智能配置与优化策略 虚拟化技术已成为现代企业IT基础设施的核心支柱,而资源的高效调度则是保障业务连续性和性能的关键。在传统虚拟化环境中,管理员往往需要手动监控主机负载并迁移虚拟机…...

Electron应用上鸿蒙PC,安装包从180MB压到45MB,我做了哪些骚操作
Electron应用上鸿蒙PC,安装包从180MB压到45MB,我做了哪些骚操作 上个月老板丢给我一个任务:把现有的Electron应用搬到鸿蒙PC上。我花了两天把代码跑通了,build了一版安装包,一看体积——180MB。老板看了一眼࿰…...
)
CodeBlocks 20.03 安装与汉化保姆级教程(附中文包下载与常见问题解决)
CodeBlocks 20.03 安装与汉化全流程实战指南 对于刚接触C/C开发的初学者来说,选择一款合适的集成开发环境(IDE)是迈入编程世界的第一步。CodeBlocks以其轻量级、跨平台和开源免费的特性,成为众多教育机构和自学者的首选。本文将带你从零开始,…...

如何实现微信聊天记录永久保存?开源工具WeChatMsg完整解决方案
如何实现微信聊天记录永久保存?开源工具WeChatMsg完整解决方案 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/…...

如何高效修复损坏视频:专业MP4恢复工具untrunc实战指南
如何高效修复损坏视频:专业MP4恢复工具untrunc实战指南 【免费下载链接】untrunc Restore a truncated mp4/mov. Improved version of ponchio/untrunc 项目地址: https://gitcode.com/gh_mirrors/un/untrunc 你是否曾因视频文件意外损坏而痛心疾首ÿ…...

React Fiber vs Vue 响应式:从调用栈到依赖图,前端两大架构的底层对决
写在前面 前端框架之争吵了快十年。但坦白说,大多数争论卡在"React 好用还是 Vue 好用"的层面,很少有人真正追问:这两个框架为什么从根上就是两套东西? 它们的差异不是 API 设计喜好不同,而是对"UI 的…...