【Python · PyTorch】线性代数 微积分
本文采用Python及PyTorch版本如下:
-
Python:3.9.0
-
PyTorch:2.0.1+cpu
本文为博主自用知识点提纲,无过于具体介绍,详细内容请参考其他文章。
线性代数 & 微积分
- 1. 线性代数
- 1.1 基础
- 1.1.1 标量
- 1.1.2 向量
- 长度(维度)、形状
- 1.1.3 矩阵
- 1.1.3.1 迹
- 1.1.3.2 转置矩阵
- 1.1.3.3 特征值
- 1.1.3.4 奇异值
- 1.1.3.5 逆矩阵
- 1.1.3.6 Moore-Penrose伪逆
- 1.1.4 张量
- 1.2 向量空间
- 1.3 运算
- 1.3.1 加 & 减
- 1.3.2 内积 & 点积
- 1.3.2.1 内积
- 1.3.2.1 点积
- 1.3.3 外积 & 克罗内克积
- 1.3.4 哈达玛积
- 1.3.5 矩阵乘积
- 1.3.6 向量-向量叉积
- 1.4 范数
- 1.5 距离(向量距离)
- 1.6 余弦相似度
- 1.7 矩阵分解
- 1.7.1 矩阵三角分解(LR / LU分解)
- 1.7.2 矩阵正交三角分解(QR分解)
- 1.7.3 矩阵特征值分解(EVD分解)
- 1.7.4 矩阵奇异值分解(SVD分解)
- 1.8 降维
- 1.8.1 基础操作
- 1.8.1.1 求和
- 1.8.1.2 平均值
- 1.8.2 PCA主成分分析
- 1.8.3 稀疏矩阵压缩
- 2. 微积分
- 2.1 导数 & 微分
- 2.2 偏导数
- 2.3 梯度
- 2.4 Hessian矩阵
- 2.5 Jacobian矩阵
1. 线性代数
线性代数是数学的一个分支,它的研究对象是向量、向量空间(线性空间)、线性变换及有限维的线性方程组。线性代数已被广泛地应用于自然科学和社会科学中。
- 线性(Linear)指量与量之间按比例、成直线的关系,在数学上可以理解为一阶导数为常数的函数。
- 非线性(Non-Linear)则相反,即量与量之间不按比例、不成直线的关系,一阶导数不为常数的函数。
1.1 基础
1.1.1 标量
在数学中,标量(Scalar):亦称作“无向量”,只具有数值大小,没有方向,但有正负之分。
在Python中,标量即为普通的数字类型,包括int(整型)、float(浮点型)、bool(布尔型)和complex(复数)。
在数学定义中,标量等价于零阶张量;在PyTorch中也是如此,但零阶张量被表示为为仅包含一个数字的torch.Tensor类型(等价于仅包含一个元素的列表),并不完全等价于数学上的普通标量(单个数字)。
import torchx = torch.tensor(3.0)
y = torch.tensor(2.0)x + y, x * y, x / y, x ** y

1.1.2 向量
在数学中,向量(Vector,亦称欧几里得向量、几何向量),指具有大小(magnitude)和方向的量,形式上表现为以原点为始点箭头指向终点的坐标。向量一般表示为带箭头的线段,表示其方向;印刷体一般为加粗体字母。
数学表示法用x∈ℝn表示向量。
印刷体:
x = [ x 1 x 2 x 3 ⋮ x n ] \boldsymbol{x} = \begin{bmatrix} x_1 \\ x_2 \\ x_3 \\ \vdots\\ x_n \\ \end{bmatrix} x= x1x2x3⋮xn
手写体:
x → = [ x 1 x 2 x 3 ⋮ x n ] \overrightarrow{x} = \begin{bmatrix} x_1 \\ x_2 \\ x_3 \\ \vdots\\ x_n \\ \end{bmatrix} x= x1x2x3⋮xn
在Python中,向量可以视作由标量值组成的列表,其中的标量值被称作向量的元素(element)或分量(component)。一般可用向量表示数据集中的样本。
在数学定义中,向量等价于一阶张量,在PyTorch中也是如此。
x = torch.arange(4)
x

我们可以通过索引访问元素,获得的元素仍为PyTorch标量(即<class 'torch.Tensor'>类型)。
x[3]

长度(维度)、形状
向量的长度与维度等价,我们可以通过Python的内置函数len来访问其长度。
len(x)

当张量为一阶张量(向量)时,我们可以通过shape属性访问其长度。
x.shape

维度之分:
- 张量:张量维度指张量的轴数(阶数)
- 向量:向量维度指元素的数量(长度)
1.1.3 矩阵
在数学中,矩阵(Matrix)是一个按照长方阵列排列的复数或实数集合。
在Python与数学中,矩阵同样代表二阶张量,以及向量的向量。
数学表示法用A∈ℝm×n来表示矩阵A,即用大写字母来表示矩阵,其中每个元素aij属于第i行第j列。
A = [ a 11 a 12 ⋯ a 1 n a 21 a 22 ⋯ a 2 n ⋮ ⋮ ⋱ ⋮ a m 1 a m 2 ⋯ a m n ] A = \begin{bmatrix} a_{11} & a_{12} & \cdots & a_{1n} \\ a_{21} & a_{22} & \cdots & a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ a_{m1} & a_{m2} & \cdots & a_{mn} \end{bmatrix} A= a11a21⋮am1a12a22⋮am2⋯⋯⋱⋯a1na2n⋮amn
A的形状为(m,n)或m×n,当m=n时,其被称作方阵(Square Matrix)。
我们可以通过调用函数创建一个5×4的矩阵。
A = torch.arange(20).reshape(5, 4)
A

与向量相同,我们可以通过索引访问元素,获得的元素仍为PyTorch标量(即<class 'torch.Tensor'>类型)。
A[3, 3]

1.1.3.1 迹
迹(trace)运算是方阵对角元素的和:
T r ( A ) = ∑ i A i , i Tr(A)=\sum_{i}A_{i,i} Tr(A)=i∑Ai,i
代码如下:
D = torch.arange(16).reshape(4,4)
D.trace()

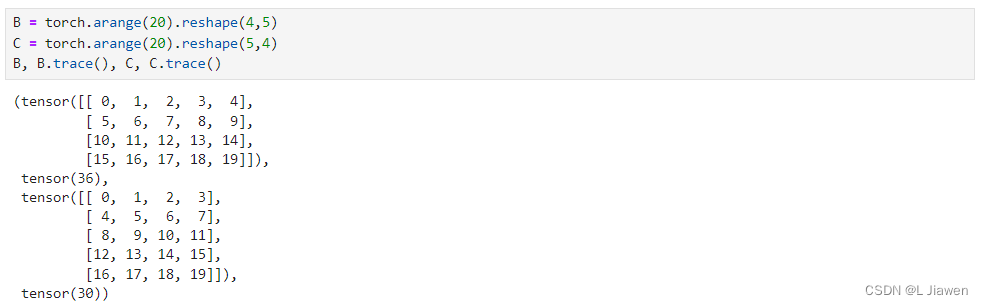
在PyTorch中,非方阵迹计算规则如下:
代码如下:
B = torch.arange(20).reshape(4,5)
C = torch.arange(20).reshape(5,4)
B, B.trace(), C, C.trace()
1.1.3.2 转置矩阵
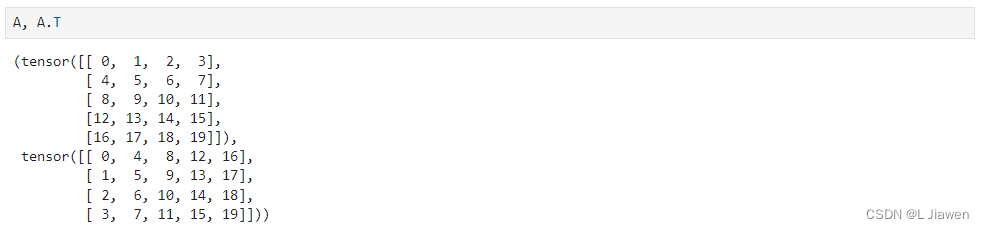
当交换矩阵的行、列时,结果称为矩阵的转置(transpose),一般使用 A T A^{T} AT表示矩阵 A A A的转置。
A T = [ a 11 a 21 ⋯ a m 1 a 12 a 22 ⋯ a m 2 ⋮ ⋮ ⋱ ⋮ a 1 n a 2 n ⋯ a m n ] A^T = \begin{bmatrix} a_{11} & a_{21} & \cdots & a_{m1} \\ a_{12} & a_{22} & \cdots & a_{m2} \\ \vdots & \vdots & \ddots & \vdots \\ a_{1n} & a_{2n} & \cdots & a_{mn} \end{bmatrix} AT= a11a12⋮a1na21a22⋮a2n⋯⋯⋱⋯am1am2⋮amn
可以通过如下代码访问其转置。
A.T
当 A = A T A=A^{T} A=AT时,将 A A A矩阵称为对称矩阵(Systematic Matrix)。
1.1.3.3 特征值
特征值:指设 A A A是n阶方阵,如果存在数m和非零n维列向量x,使得 A x = λ x Ax=λx Ax=λx成立,则称λ是 A A A的一个特征值(characteristic value)或本征值(eigenvalue)。特征值分解可对满秩方阵进行分解。
具体内容见:特征值分解
1.1.3.4 奇异值
奇异值是矩阵里的概念,一般通过奇异值分解定理求得。设 A A A为m*n阶矩阵,q=min(m,n), A A T AA^{T} AAT的q个非负特征值的算术平方根叫作A的奇异值。奇异值分解是线性代数和矩阵论中一种重要的矩阵分解法,适用于信号处理和统计学等领域。
具体内容见:奇异值分解
1.1.3.5 逆矩阵
设A是一个n阶矩阵,若存在另一个n阶矩阵B,使得: AB=BA=I ,则称方阵A可逆,并称方阵B是A的逆矩阵。
A B = B A = I A T = B AB=BA=I\\ A^{T}=B AB=BA=IAT=B
求逆矩阵代码如下:
# 矩阵求逆一般建议使用double或float浮点型,否则无法表示元素为小数的逆矩阵
F = torch.tensor([[1., 2, 3], [0, 4, 5], [0, 0, 6]])
F.inverse()

1.1.3.6 Moore-Penrose伪逆
对于非方阵,其逆矩阵没有定义,但我们希望通过 A ∈ R m × n A\in \mathbb{R^{m×n}} A∈Rm×n的左逆 B B B求解线性方程:
A x = y Ax=y Ax=y
即:
x = B y x=By x=By
Moore-Penrose伪逆(Moore-Penrose广义逆)定义如下:
A + = lim α → 0 ( A T A + α I ) − 1 A T = V D + U T A^{+}=\lim_{\alpha→0}(A^{T}A+\alpha I)^{-1}A^{T}=VD^{+}U^{T} A+=α→0lim(ATA+αI)−1AT=VD+UT
其中,矩阵 U U U、 D D D和 V V V是矩阵 A A A的奇异值分解后得到的矩阵。对角矩阵 D D D的伪逆 D + D^{+} D+是其非零元素取倒数再转置得到的。
对于矩阵 A ∈ R m × n A\in \mathbb{R^{m×n}} A∈Rm×n:
- 当 m < n m<n m<n时(行数<列数),方程可能有多个解, x = A + y \boldsymbol{x}=A^{+}y x=A+y是所有可行解中L2范数 ∣ ∣ x ∣ ∣ 2 ||x||_2 ∣∣x∣∣2最小的解。
- 当 m > n m>n m>n时(列数<行数),方程可能没有解, x = A + y \boldsymbol{x}=A^{+}y x=A+y可使得 A x Ax Ax和 y y y的L2距离 ∣ ∣ A x − y ∣ ∣ 2 ||Ax-y||_2 ∣∣Ax−y∣∣2最小。
1.1.4 张量
张量是一个更为一般的定义,其用特殊字体的大写字母表示( X \textsf{X} X),低阶张量与上述三种量的等价关系如下:
-
零阶张量:标量(Scalar)
-
一阶张量:向量(Vector)
-
二阶张量:矩阵(Matrix)
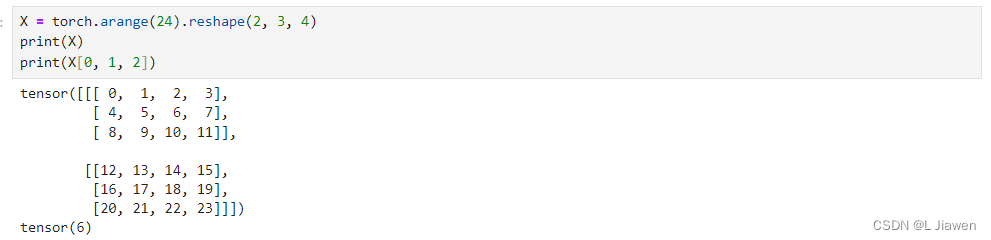
我们同样可以使用类似的方式创建高阶张量,并通过索引访问其中的元素,获得的元素仍为PyTorch标量(即<class 'torch.Tensor'>类型)。
X = torch.arange(24).reshape(2, 3, 4)
print(X)
print(X[0, 1, 2])
1.2 向量空间
向量空间亦称线性空间,它是线性代数的中心内容和基本概念之一。
设V是一个非空集合,P是一个域。若:
1.在V中定义了一种运算,称为加法,即对V中任意两个元素α与β都按某一法则对应于V内惟一确定的一个元素α+β,称为α与β的和。
2.在P与V的元素间定义了一种运算,称为数乘(亦称数量乘法),即对V中任意元素α和P中任意元素k,都按某一法则对应V内惟一确定的一个元素kα,称为k与α的积。
3.加法与纯量乘法满足以下条件:
(1)α+β=β+α,对任意α,β∈V.
(2)α+(β+γ)=(α+β)+γ,对任意α,β,γ∈V.
(3)存在一个元素0∈V,对一切α∈V有α+0=α,元素0称为V的零元.
(4)对任一α∈V,都存在β∈V使α+β=0,β称为α的负元素,记为-α.
(5)对P中单位元1,有1α=α(α∈V).
(6)对任意k,l∈P,α∈V有(kl)α=k(lα).
(7)对任意k,l∈P,α∈V有(k+l)α=kα+lα.
(8)对任意k∈P,α,β∈V有k(α+β)=kα+kβ.
则称V为域P上的一个线性空间,或向量空间。
其中,V中元素称为向量,V的零元称为零向量,P称为线性空间的基域。
当P是实数域时,V称为实线性空间;当P是复数域时,V称为复线性空间。
1.3 运算
1.3.1 加 & 减
任意阶张量均可与自身形状相同的张量相加减。若与单一数字相加减,将为张量内所有元素加减对应数字(等同于张量与由对应数字组成、与其形状、大小相同的张量相加减)
标量:
# 标量
a = torch.tensor(1)
b = torch.tensor(2)
a + b, a + 1

向量:
# 向量
e = torch.tensor([1, 2, 3])
f = torch.tensor([2, 3, 4])
e + f, e + 1

矩阵:
# 矩阵
A = torch.arange(20).reshape(4, 5)
B = torch.arange(12, 20 + 12).reshape(4, 5)
A + B, A + 1
高阶张量:
# 高阶张量
X = torch.arange(24).reshape(2 ,3, 4)
Y = torch.arange(12 , 24 + 12).reshape(2 ,3, 4)
X + Y, X + Y
1.3.2 内积 & 点积
1.3.2.1 内积
内积(Inner Product): 亦称数量积(dot product; scalar product),是指接受在实数R上的两个向量并返回一个实数值标量的二元运算。
假设有两向量 a \boldsymbol{a} a, b \boldsymbol{b} b,则其内积表示如下:
⟨ a , b ⟩ \langle \boldsymbol{a}, \boldsymbol{b} \rangle ⟨a,b⟩
除此之外,还有 内积空间 的定义,有兴趣的读者可以自行查阅资料了解,这里不过多叙述。
计算向量内积的代码如下:
a = torch.tensor([1., 2., 3.])
b = torch.tensor([4., 5., 6.])
a.inner(b)

1.3.2.1 点积
点积(Dot Product):内积的一种特殊形式,即欧几里得空间内积的定义。
假设有两向量 a \boldsymbol{a} a, b \boldsymbol{b} b,则其点积表示如下:
a ⋅ b = a 1 ∗ b 1 + a 2 ∗ b 2 + ⋯ + a n ∗ b n = ∑ i = 1 n a i ∗ b i \boldsymbol{a} \cdot \boldsymbol{b} = a_1 * b_1 + a_2 * b_2 + \cdots + a_n * b_n = \sum_{i=1}^{n}a_i * b_i a⋅b=a1∗b1+a2∗b2+⋯+an∗bn=i=1∑nai∗bi
计算向量点积的代码如下:
a = torch.tensor([1., 2., 3.])
b = torch.tensor([4., 5., 6.])
a.dot(b)

1.3.3 外积 & 克罗内克积
克罗内克积(Kronecker product):张量积的特殊形式
- 克罗内克积是两个任意大小的矩阵间的运算,结果仍为一个矩阵(数学符号 ⊗ \otimes ⊗,精确表达 ⊗ k \otimes_{k} ⊗k)
我们以矩阵为例,用数学符号表示其计算过程:
A m × n ⊗ B p × q = [ a 11 B ⋯ a m 1 B ⋮ ⋱ ⋮ a 1 n B ⋯ a m n B ] = [ a 11 b 11 a 11 b 12 ⋯ a 11 b 1 q ⋯ ⋯ a 1 n b 11 a 1 n b 12 ⋯ a 1 n b 1 q a 11 b 11 a 11 b 12 ⋯ a 11 b 1 q ⋯ ⋯ a 1 n b 11 a 1 n b 12 ⋯ a 1 n b 1 q ⋮ ⋮ ⋱ ⋮ ⋮ ⋮ ⋱ ⋮ a 11 b p 1 a 11 b p 2 ⋯ a 11 b p q ⋯ ⋯ a 1 n b p 1 a 1 n b p 2 ⋯ a 1 n b p q ⋮ ⋮ ⋱ ⋮ ⋱ ⋮ ⋮ ⋮ ⋮ ⋮ ⋱ ⋮ ⋱ ⋮ ⋮ ⋮ a m 1 b 11 a m 1 b 12 ⋯ a m 1 b 1 q ⋯ ⋯ a m n b 11 a m n b 12 ⋯ a m n b 1 q a m 1 b 21 a m 1 b 22 ⋯ a m 1 b 2 q ⋯ ⋯ a m n b 21 a m n b 22 ⋯ a m n b 2 q ⋮ ⋮ ⋱ ⋮ ⋮ ⋮ ⋱ ⋮ a m 1 b p 1 a m 1 b p 2 ⋯ a m 1 b p q ⋯ ⋯ a m n b p 1 a m n b p 2 ⋯ a m n b p q ] A_{m×n} \otimes B_{p×q} = \begin{bmatrix} a_{11}B & \cdots & a_{m1}B \\ \vdots & \ddots & \vdots \\ a_{1n}B & \cdots & a_{mn}B \end{bmatrix} = \begin{bmatrix} a_{11}b_{11} & a_{11}b_{12} & \cdots & a_{11}b_{1q}& \cdots & \cdots & a_{1n}b_{11} & a_{1n}b_{12} & \cdots & a_{1n}b_{1q} \\ a_{11}b_{11} & a_{11}b_{12} & \cdots & a_{11}b_{1q}& \cdots & \cdots & a_{1n}b_{11} & a_{1n}b_{12} & \cdots & a_{1n}b_{1q} \\ \vdots & \vdots & \ddots & \vdots & & & \vdots & \vdots & \ddots & \vdots \\ a_{11}b_{p1} & a_{11}b_{p2} & \cdots & a_{11}b_{pq}& \cdots & \cdots & a_{1n}b_{p1} & a_{1n}b_{p2} & \cdots & a_{1n}b_{pq} \\ \vdots & \vdots & \ddots & \vdots & \ddots & & \vdots & \vdots & & \vdots \\ \vdots & \vdots & \ddots & \vdots & & \ddots & \vdots & \vdots & & \vdots \\ a_{m1}b_{11} & a_{m1}b_{12} & \cdots & a_{m1}b_{1q}& \cdots & \cdots & a_{mn}b_{11} & a_{mn}b_{12} & \cdots & a_{mn}b_{1q} \\ a_{m1}b_{21} & a_{m1}b_{22} & \cdots & a_{m1}b_{2q}& \cdots & \cdots & a_{mn}b_{21} & a_{mn}b_{22} & \cdots & a_{mn}b_{2q} \\ \vdots & \vdots & \ddots & \vdots & & & \vdots & \vdots & \ddots & \vdots \\ a_{m1}b_{p1} & a_{m1}b_{p2} & \cdots & a_{m1}b_{pq}& \cdots & \cdots & a_{mn}b_{p1} & a_{mn}b_{p2} & \cdots & a_{mn}b_{pq} \\ \end{bmatrix} Am×n⊗Bp×q= a11B⋮a1nB⋯⋱⋯am1B⋮amnB = a11b11a11b11⋮a11bp1⋮⋮am1b11am1b21⋮am1bp1a11b12a11b12⋮a11bp2⋮⋮am1b12am1b22⋮am1bp2⋯⋯⋱⋯⋱⋱⋯⋯⋱⋯a11b1qa11b1q⋮a11bpq⋮⋮am1b1qam1b2q⋮am1bpq⋯⋯⋯⋱⋯⋯⋯⋯⋯⋯⋱⋯⋯⋯a1nb11a1nb11⋮a1nbp1⋮⋮amnb11amnb21⋮amnbp1a1nb12a1nb12⋮a1nbp2⋮⋮amnb12amnb22⋮amnbp2⋯⋯⋱⋯⋯⋯⋱⋯a1nb1qa1nb1q⋮a1nbpq⋮⋮amnb1qamnb2q⋮amnbpq
下面我们分别展示求标量、向量、矩阵、高阶张量的克罗内克积。
标量-克罗内克积:
a = torch.tensor([2])
b = torch.tensor([3])
a.kron(b)

向量-克罗内克积:
x = torch.arange(3)
y = torch.arange(2, 2 + 3)
x.kron(y)

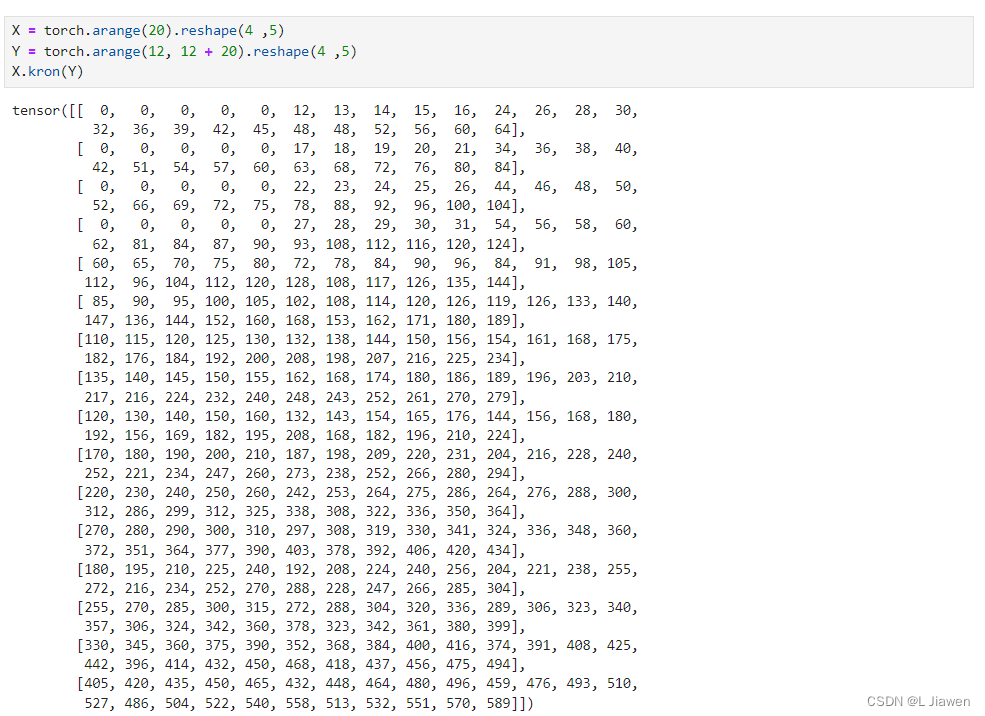
矩阵-克罗内克积:
X = torch.arange(20).reshape(4 ,5)
Y = torch.arange(12, 12 + 20).reshape(4 ,5)
X.kron(Y)
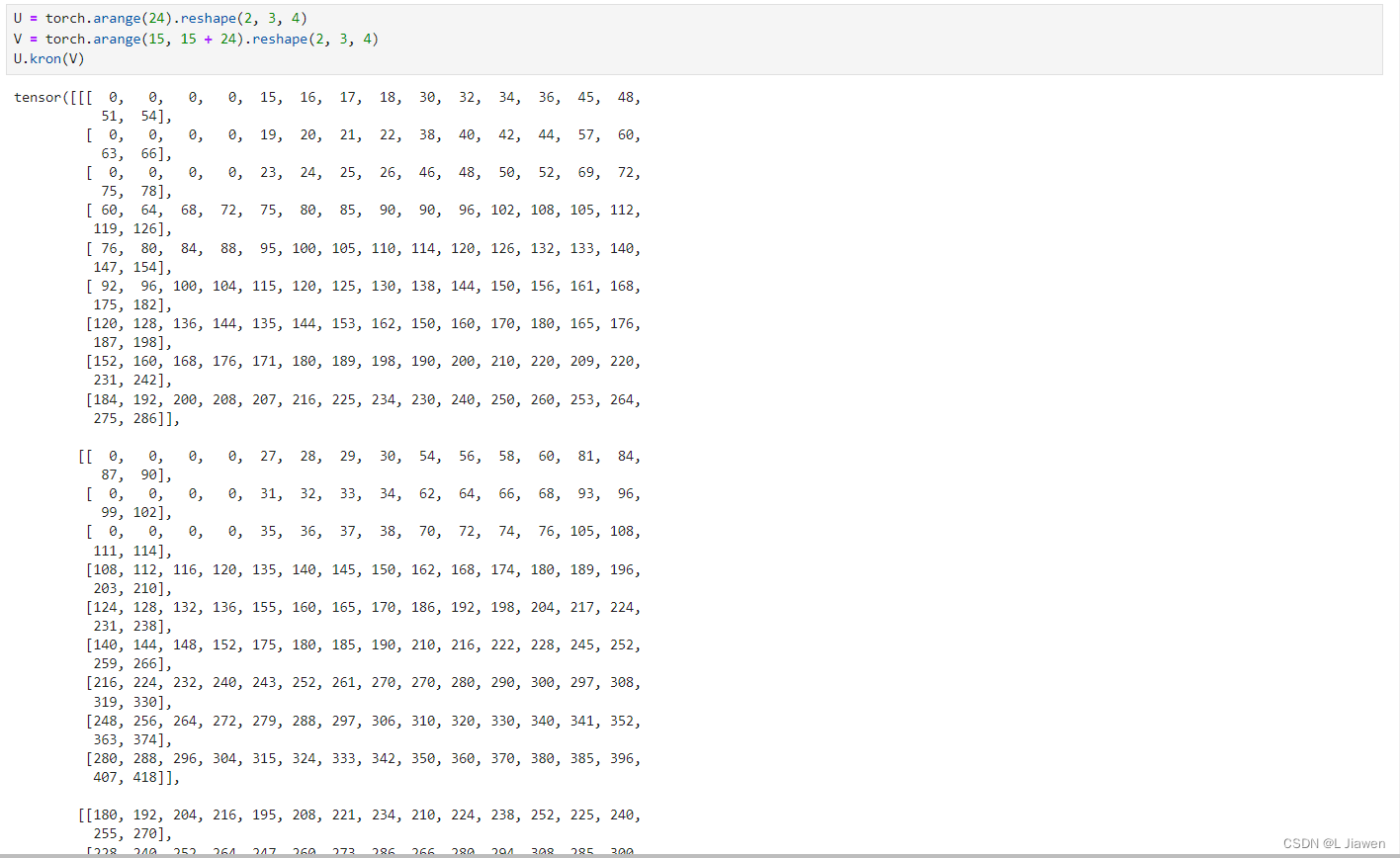
高阶张量-克罗内克积:
U = torch.arange(24).reshape(2, 3, 4)
V = torch.arange(15, 15 + 24).reshape(2, 3, 4)
U.kron(V)
1.3.4 哈达玛积
两个张量(标量、向量、矩阵、高阶张量)的按元素乘法称为哈达玛积(Hadamard Product)(数学符号 ⊙ \odot ⊙),在代码中用*表示求哈达玛积。
我们以矩阵为例,用数学符号表示其计算过程:
A ⊙ B = [ a 11 a 21 ⋯ a m 1 a 12 a 22 ⋯ a m 2 ⋮ ⋮ ⋱ ⋮ a 1 n a 2 n ⋯ a m n ] ⊙ [ b 11 b 21 ⋯ b m 1 b 12 b 22 ⋯ b m 2 ⋮ ⋮ ⋱ ⋮ b 1 n b 2 n ⋯ b m n ] = [ a 11 ∗ b 11 a 21 ∗ b 21 ⋯ a m 1 ∗ b m 1 a 12 ∗ b 12 a 22 ∗ b 22 ⋯ a m 2 ∗ b m 2 ⋮ ⋮ ⋱ ⋮ a 1 n ∗ b 1 n a 2 n ∗ b 2 n ⋯ a m n ∗ b m n ] A \odot B = \begin{bmatrix} a_{11} & a_{21} & \cdots & a_{m1} \\ a_{12} & a_{22} & \cdots & a_{m2} \\ \vdots & \vdots & \ddots & \vdots \\ a_{1n} & a_{2n} & \cdots & a_{mn} \end{bmatrix} \odot \begin{bmatrix} b_{11} & b_{21} & \cdots & b_{m1} \\ b_{12} & b_{22} & \cdots & b_{m2} \\ \vdots & \vdots & \ddots & \vdots \\ b_{1n} & b_{2n} & \cdots & b_{mn} \end{bmatrix} =\begin{bmatrix} a_{11} * b_{11} & a_{21} * b_{21} & \cdots & a_{m1} * b_{m1} \\ a_{12} * b_{12} & a_{22} * b_{22} & \cdots & a_{m2} * b_{m2} \\ \vdots & \vdots & \ddots & \vdots \\ a_{1n} * b_{1n} & a_{2n} * b_{2n} & \cdots & a_{mn} * b_{mn} \end{bmatrix} A⊙B= a11a12⋮a1na21a22⋮a2n⋯⋯⋱⋯am1am2⋮amn ⊙ b11b12⋮b1nb21b22⋮b2n⋯⋯⋱⋯bm1bm2⋮bmn = a11∗b11a12∗b12⋮a1n∗b1na21∗b21a22∗b22⋮a2n∗b2n⋯⋯⋱⋯am1∗bm1am2∗bm2⋮amn∗bmn
下面我们分别展示求标量、向量、矩阵、高阶张量的哈达玛积。
标量-哈达玛积:
a = torch.tensor([2])
b = torch.tensor([3])
a * b

向量-哈达玛积:
x = torch.arange(3)
y = torch.arange(2, 2 + 3)
x * y

矩阵-哈达玛积:
X = torch.arange(20).reshape(4 ,5)
Y = torch.arange(12, 12 + 20).reshape(4 ,5)
X * Y

高阶张量-哈达玛积:
U = torch.arange(24).reshape(2, 3, 4)
V = torch.arange(15, 15 + 24).reshape(2, 3, 4)
U * V

1.3.5 矩阵乘积
矩阵乘积(Matrix Product): A m × n ⋅ B n × p = C m × p A_{m×n}·B_{n×p}=C_{m×p} Am×n⋅Bn×p=Cm×p,即A的列数须与B的行数相等, C i , j = ∑ k = 1 n A i , k B k , j C_{i,j}=\sum_{k=1}^{n}A_{i,k}B_{k,j} Ci,j=∑k=1nAi,kBk,j,在代码中用符号@表示。
标量-标量 矩阵乘积 :标量与标量乘积可用符号@表示,也可用torch.matmul()运算。
c = torch.tensor([2])
d = torch.tensor([3])
c @ d

向量-矩阵 矩阵乘积 :
向量与矩阵乘积可用符号@表示,也可用torch.mv()或torch.matmul()运算。
区别:
torch.mv()须确保矩阵为第一个参数,向量为第二个参数,且形状符合运算规则。@或torch.matmul()则无上述限制,可将两者视为普通矩阵进行运算。
e = torch.arange(4.) # 等效于 torch.arange(4.0)
f = torch.arange(5.)
B = torch.arange(12.,20+12).reshape(4,5)
e @ B, e.matmul(B), B.mv(f)

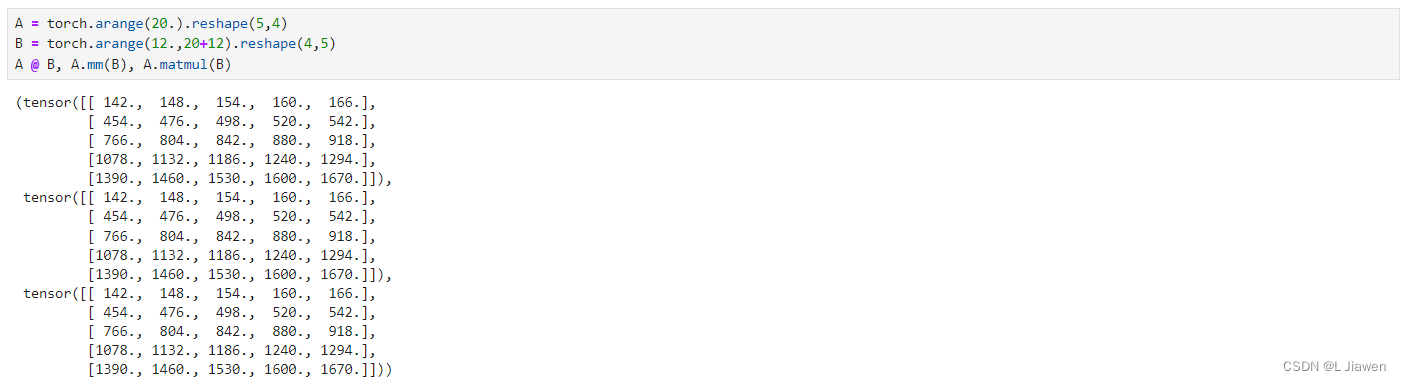
矩阵-矩阵 矩阵乘积 :
向量与矩阵乘积可用符号@表示,也可用torch.mm()或torch.matmul()运算。
A = torch.arange(20.).reshape(5,4)
B = torch.arange(12.,20+12).reshape(4,5)
A @ B, A.mm(B), A.matmul(B)
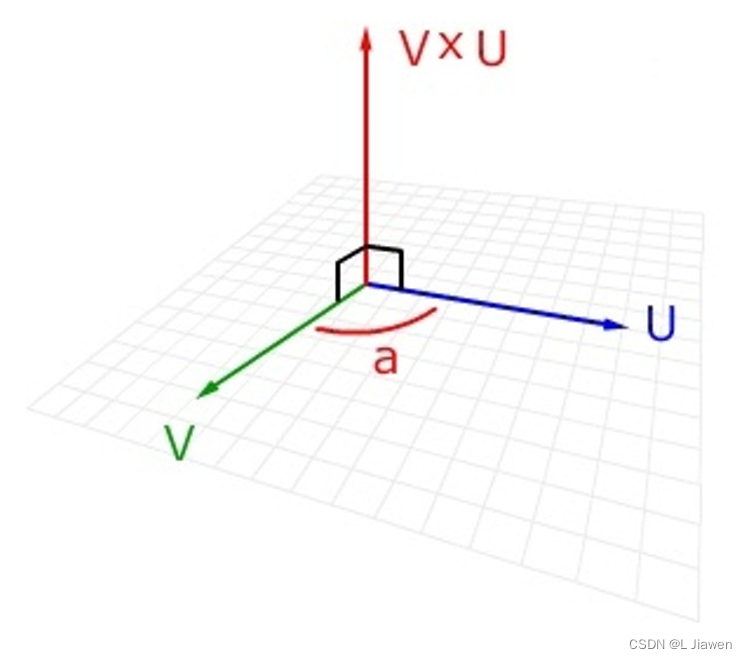
1.3.6 向量-向量叉积
向量积(Cross Product),又称叉积,是一种在向量空间中向量的二元运算,其可以新产生一个与原两向量都垂直的向量。
可以用数学符号 × × ×表示叉积,有时也用^表示叉积避免与字母 x x x混淆。
向量积:|c|=|a×b|=|a||b|sin<a,b>
即c的长度在数值上等于以a,b,夹角为θ组成的平行四边形的面积。
而c的方向垂直于a与b所决定的平面,c的指向按右手定则从a转向b来确定。(一个简单的确定满足“右手定则”的结果向量的方向的方法是这样的:若坐标系是满足右手定则的,当右手的四指从a以不超过180度的转角转向b时,竖起的大拇指指向是c的方向。)
在PyTorch中求两向量叉积的方式如下。
x = torch.tensor([1, 2, 3])
y = torch.tensor([4, 5, 6])
x.cross(y)

1.4 范数
PyTorch范数API
torch.norm(input, p='fro', dim=None, keepdim=False, out=None, dtype=None)
其中,参数释义如下:
- input:输入tensor类型的数据(张量内元素须为浮点型/复数)
- p指定的范数
- ‘fro’:Frobenius范数,即矩阵各项元素的绝对值平方总和。
- ‘nuc’:核范数,即矩阵奇异值之和。
- int型:p范数。
- dim:指定计算维度,默认所有维度计算。
- keepdim:布尔型,决定是否保留dim指定维度。
- out:输出的tensor。
- dtype:指定输出的tensor的数据类型。
首先我们定义所需的向量、矩阵。
x = torch.tensor([1., 2., 3.]) # 数字加小数点创建,默认为double型
y = torch.tensor([4., 5., 6.])"""另外两种创建方式及不同浮点类型"""
# x = torch.tensor([1, 2, 3], dtype = torch.float64) # 指定float64
# y = torch.tensor([4, 5, 6], dtype = torch.float64)# x = torch.FloatTensor([1, 2, 3]) # 此方式默认float32
# y = torch.FloatTensor([4, 5, 6])A = torch.arange(12, dtype = torch.double).reshape(3, 4)
B = torch.arange(20, dtype = torch.double).reshape(4, 5)
1.4.1 向量范数(p范数)
1.4.1.1 l 1 \mathscr{l_1} l1范数
曼哈顿范数(L1范数):向量所有分量绝对值之和,它受异常值影响较小。
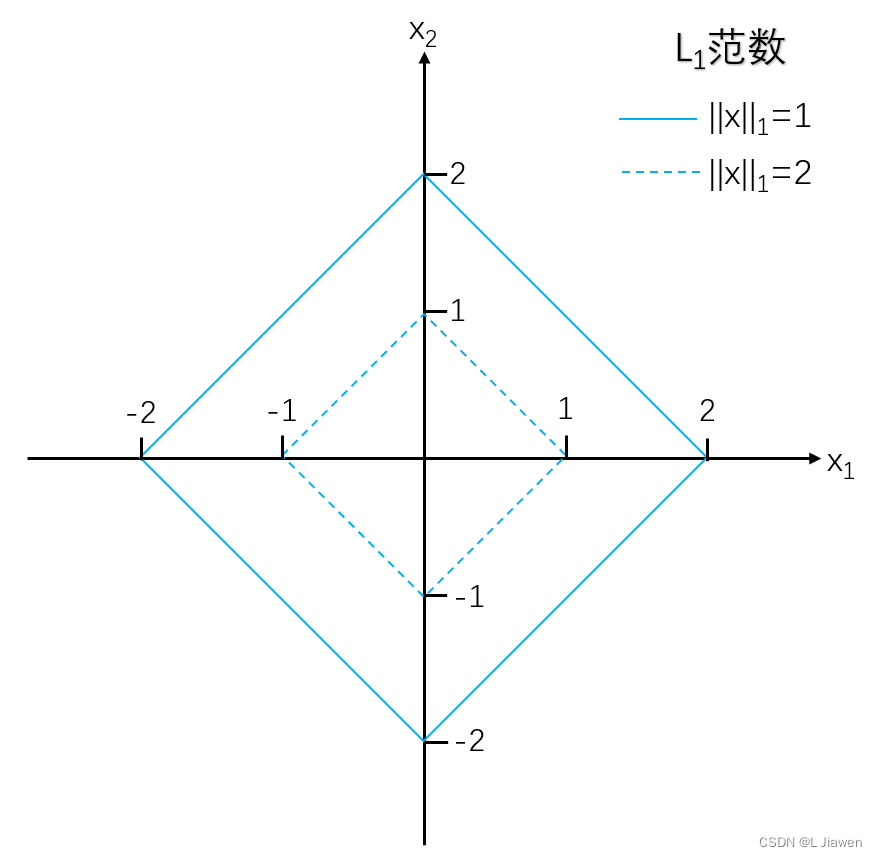
∣ ∣ x ∣ ∣ 1 = ∑ i = 1 n ∣ x i ∣ ||\boldsymbol{x}||_{1}=\sum_{i=1}^{n}|x_{i}| ∣∣x∣∣1=i=1∑n∣xi∣
代码如下:
x.norm(p=1)

1.4.1.2 l 2 \mathscr{l_2} l2范数
欧几里得范数(L2范数):向量所有分量绝对值平方和的平方根。
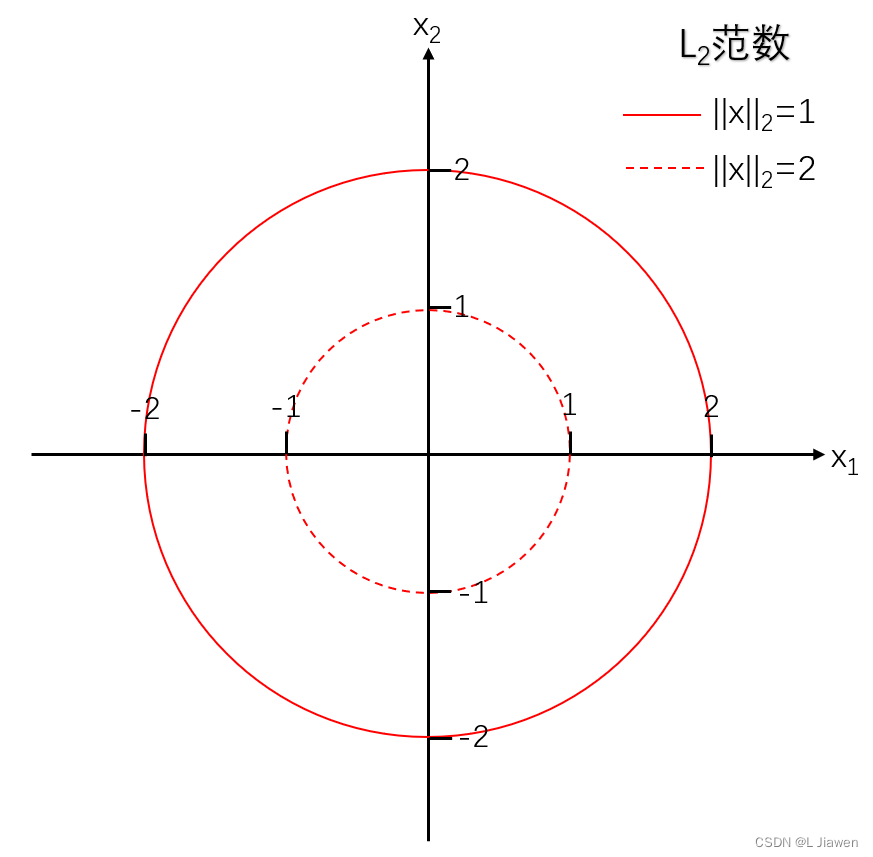
∣ ∣ x ∣ ∣ 2 = ∑ i = 1 n x i 2 = ( ∑ i = 1 n x i 2 ) 1 2 ||\boldsymbol{x}||_{2}=\sqrt{\sum_{i=1}^{n}x_{i}^{2}}=(\sum_{i=1}^{n}x_{i}^{2})^{\frac{1}{2}} ∣∣x∣∣2=i=1∑nxi2=(i=1∑nxi2)21
代码如下:
x.norm(p=2)

1.4.1.3 l ∞ \mathscr{l_\infty} l∞范数
切比雪夫范数(L∞范数):向量所有分量绝对值最大值。
∣ ∣ x ∣ ∣ ∞ = lim p → ∞ ∑ i = 1 n ∣ x i ∣ p p = lim p → ∞ ( ∑ i = 1 n ∣ x i ∣ p ) 1 p = max ( ∣ x i ∣ ) ||\boldsymbol{x}||_{\infty}=\lim_{p\to \infty}\sqrt[p]{\sum_{i=1}^{n}|x_{i}|^{p}}=\lim_{p\to \infty}(\sum_{i=1}^{n}|x_{i}|^{p})^{\frac{1}{p}}=\max(|x_{i}|) ∣∣x∣∣∞=p→∞limpi=1∑n∣xi∣p=p→∞lim(i=1∑n∣xi∣p)p1=max(∣xi∣)
我们已经发现了距离间的规律,这些范数被统称为p范数,可用如下公式表示所有向量p范数:
∣ ∣ x ∣ ∣ p = ∑ i = 1 n ∣ x i ∣ p p = ( ∑ i = 1 n ∣ x i ∣ p ) 1 p ||\boldsymbol{x}||_{p}=\sqrt[p]{\sum_{i=1}^{n}|x_{i}|^{p}}=(\sum_{i=1}^{n}|x_{i}|^{p})^{\frac{1}{p}} ∣∣x∣∣p=pi=1∑n∣xi∣p=(i=1∑n∣xi∣p)p1
- 当 p = 1 时,上式表示 曼哈顿范数
- 当 p = 2 时,上式表示 欧几里得范数
- 当 p → ∞ 时,上式表示 切比雪夫范数
1.4.2 矩阵范数
1.4.2.1 F r o b e n i u s \mathscr{Frobenius} Frobenius范数
弗罗贝尼乌斯范数:类似于向量的L2范数,矩阵 X ∈ R m × n X\in\mathbb{R^{m×n}} X∈Rm×n的弗罗贝尼乌斯范数是矩阵元素平方和的平方根。
∣ ∣ X ∣ ∣ F = ∑ i = 1 m ∑ j = 1 n x i j 2 ||X||_{F}=\sqrt{\sum_{i=1}^{m}\sum_{j=1}^{n}x_{ij}^{2}} ∣∣X∣∣F=i=1∑mj=1∑nxij2
它具有向量范数的所有性质,代码如下:
# torch默认计算Frobenius范数
A.norm()

1.4.2.2 核范数
核范数:矩阵奇异值的和,可以用来衡量矩阵的稀疏性。我们可用核范数来约束模型的复杂度,防止过拟合。
∣ ∣ X ∣ ∣ ∗ = t r ( X T X ) = ∣ ∣ U ∣ ∣ 1 ||X||_{*} = tr(\sqrt{X^{T}X})=||U||_{1} ∣∣X∣∣∗=tr(XTX)=∣∣U∣∣1
其中,U是A的奇异值分解(SVD)的左奇异矩阵, ∣ ∣ U ∣ ∣ 1 ||U||_{1} ∣∣U∣∣1表示其L1范数,核范数非负。
该范数常被用于约束矩阵的低秩,对于稀疏性质的数据而言,其矩阵是低秩且会包含大量冗余信息,这些信息可被用于恢复数据和提取特征。
A.norm(p='nuc')

1.5 距离(向量距离)
PyTorch距离API
torch.pairwise_distance(x1, x2, p=2.0, eps=1e-6, keepdim=False)
其中,input表示输入,p表示距离类型(默认为l2距离)
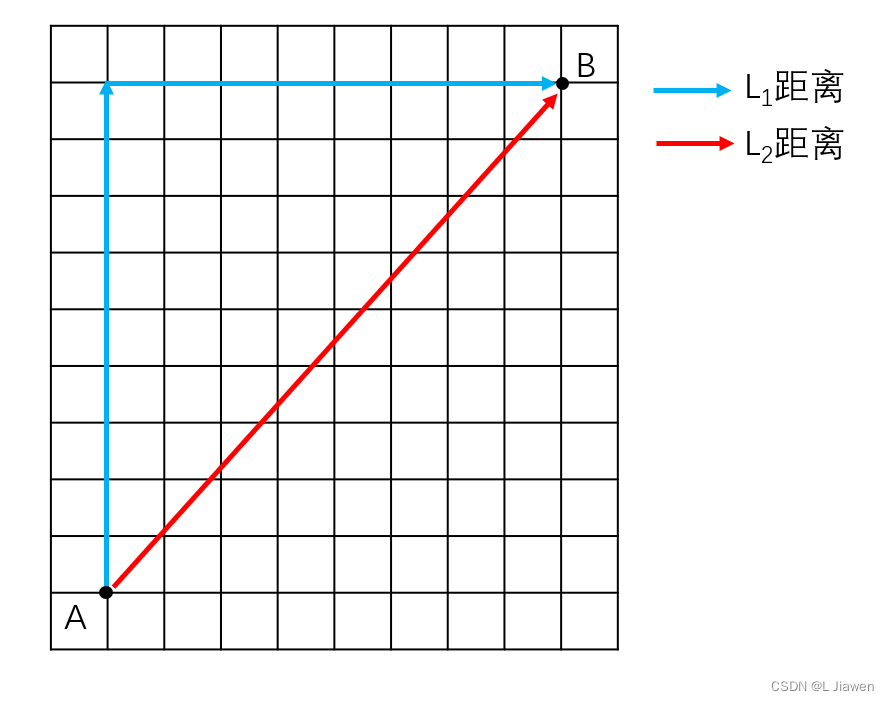
1.5.1 l 1 \mathscr{l_1} l1距离
曼哈顿距离(L1距离):在n维空间中,两点各坐标数值差绝对值之和。
d 1 = ∑ i = 1 n ∣ x i − y i ∣ d_{1}=\sum_{i=1}^{n}|x_{i} - y_{i}| d1=i=1∑n∣xi−yi∣
torch.pairwise_distance(x, y, p=1)

1.5.2 l 2 \mathscr{l_2} l2距离
欧几里得距离(L2距离):在n维空间中,两点各坐标数值差绝对值平方和的平方根。
d 2 = ∑ i = 1 n ( x i − y i ) 2 = ( ∑ i = 1 n x i 2 − y i ) 2 ) 1 2 d_{2}=\sqrt{\sum_{i=1}^{n}(x_{i} - y_{i})^{2}}=(\sum_{i=1}^{n}x_{i}^{2} - y_{i})^{2})^{\frac{1}{2}} d2=i=1∑n(xi−yi)2=(i=1∑nxi2−yi)2)21
torch.pairwise_distance(x, y, p=2)

1.5.3 l ∞ \mathscr{l_\infty} l∞距离
切比雪夫距离(L∞距离):在n维空间中,两点各坐标数值差绝对值的最大值。
d ∞ = lim p → ∞ ∑ i = 1 n ∣ x i − y i ∣ p p = lim p → ∞ ( ∑ i = 1 n ∣ x i − y i ∣ p ) 1 p = max ( ∣ x i − y i ∣ ) d_{\infty}=\lim_{p\to \infty}\sqrt[p]{\sum_{i=1}^{n}|x_{i} - y_{i}|^{p}}=\lim_{p\to \infty}(\sum_{i=1}^{n}|x_{i} - y_{i}|^{p})^{\frac{1}{p}}=\max(|x_{i} - y_{i}|) d∞=p→∞limpi=1∑n∣xi−yi∣p=p→∞lim(i=1∑n∣xi−yi∣p)p1=max(∣xi−yi∣)
我们已经发现了距离间的规律,可用如下公式表示所有向量距离:
d p = ∑ i = 1 n ∣ x i − y i ∣ p p = ( ∑ i = 1 n ∣ x i − y i ∣ p ) 1 p d_{p}=\sqrt[p]{\sum_{i=1}^{n}|x_{i} - y_{i}|^{p}}=(\sum_{i=1}^{n}|x_{i} - y_{i}|^{p})^{\frac{1}{p}} dp=pi=1∑n∣xi−yi∣p=(i=1∑n∣xi−yi∣p)p1
- 当 p = 1 时,上式表示 曼哈顿距离
- 当 p = 2 时,上式表示 欧几里得距离
- 当 p → ∞ 时,上式表示 切比雪夫距离
1.6 余弦相似度
余弦相似度:又称为余弦相似性,是通过计算两个向量的夹角余弦值来评估他们的相似度。
s i m i l a r i t y = c o s ( θ ) = a ⋅ b ∣ ∣ a ∣ ∣ ⋅ ∣ ∣ b ∣ ∣ = ∑ i = 1 n a i × b i ∑ i = 1 n ( a i ) 2 × ∑ i = 1 n ( b i ) 2 similarity=cos(\theta)=\frac{\boldsymbol{a}·\boldsymbol{b}}{||\boldsymbol{a}||·||\boldsymbol{b}||}=\frac{\sum_{i=1}^{n}a_{i}×b_{i}}{\sqrt{\sum_{i=1}^{n}(a_{i})^{2}}×\sqrt{\sum_{i=1}^{n}(b_{i})^{2}}} similarity=cos(θ)=∣∣a∣∣⋅∣∣b∣∣a⋅b=∑i=1n(ai)2×∑i=1n(bi)2∑i=1nai×bi
PyTorch余弦相似度API
torch.cosine_similarity(x1, x2, dim=1, eps=1e-8)
代码示例如下:
a = torch.tensor([1., 2, 3])
b = torch.tensor([2., 3, 4])
# 'Tensor' object has no attribute 'cosine_similarity'
# Tensor类型对象未内置cosine_similarity方法,需按如下方式调用
torch.cosine_similarity(a, b, dim=0)

1.7 矩阵分解
矩阵分解:将矩阵拆解为数个矩阵的乘积
1.7.1 矩阵三角分解(LR / LU分解)
三角分解:最常见的一种分解方式,便于我们求原矩阵的行列式、逆矩阵等。
1.7.2 矩阵正交三角分解(QR分解)
正交三角分解:矩阵先经过正交相似变化成为Hessenberg矩阵,再应用QR方法求特征值和特征向量。它是将矩阵分解成一个正规正交矩阵Q与上三角形矩阵R,所以称为QR分解法,与此正规正交矩阵的通用符号Q有关。
1.7.3 矩阵特征值分解(EVD分解)
特征值分解:亦称谱分解(Spectral Decomposition),将矩阵分解成特征值和特征向量表示的矩阵乘法的形式。
定义: A A A是一个n×n方阵,且有n个线性无关的特征向量 q i ( i = 1 , . . . , n ) q_{i}(i=1,...,n) qi(i=1,...,n),可将 A A A分解为:
A = Q Λ Q − 1 A=Q \Lambda Q^{-1} A=QΛQ−1
其中,Q是n×n方针,且第i列为A的特征向量 q i q_{i} qi。 Λ \Lambda Λ是对角矩阵,其对角线上的元素对应特征值,即 Λ i i = λ i \Lambda_{ii}=\lambda_{i} Λii=λi。
只有可对角化矩阵(满秩)才能作特征分解。
1.7.4 矩阵奇异值分解(SVD分解)
定义: A A A是一个m×n实矩阵,存在一个分解使得 A = U Σ V T A=U \Sigma V^{T} A=UΣVT
其中, U U U是m×m阶正交矩阵,$\Sigma 是 m × n 阶非负实数对角矩阵, 是m×n阶非负实数对角矩阵, 是m×n阶非负实数对角矩阵,V$是n×n阶正交矩阵。
奇异值分解使得非方阵也能进行分解,由于 A A T AA^{T} AAT必定为实对称矩阵,对它进行特征值分解,被称作对A进行奇异值分解。
其中, U U U和 V V V均为正交矩阵, Σ \Sigma Σ是对角矩阵,根据特征值分解可以得到具体说明如下:
- U U U被称为A的左奇异矩阵,其列组成的向量是方阵 A A T AA_{T} AAT的特征向量,亦称 A A A的左奇异向量。
- V V V被称为A的右奇异矩阵,其列组成的向量是方阵 A A T AA_{T} AAT的特征向量,亦称 A A A的右奇异向量。
- Σ \Sigma Σ对角线上的元素 σ i i \sigma_{ii} σii即为A的奇异值,它们等于 A A T AA_{T} AAT及 A T A A_{T}A ATA特征值的平方根( σ = λ \sigma=\sqrt{\lambda} σ=λ),行对应 U U U的列向量,列对应 V V V的列向量。
奇异值分解的代码如下:
A = torch.tensor([[1., 2., 3., 4.],[2., 3., 4., 5.],[3., 4., 5., 6.]])
A.svd()

1.8 降维
1.8.1 基础操作
1.8.1.1 求和
我们可对张量所有元素求和:
x = torch.arange(6, dtype=torch.double)
x, x.sum()

还可以指定按列/行元素求和:
A = torch.arange(20, dtype=torch.double).reshape(5, 4)A_sum_axis0 = A.sum(axis=0) # 将矩阵列向量求和(沿着行挨个列向量求和)
A_sum_axis1 = A.sum(axis=1) # 将矩阵行向量求和(沿着列挨个行向量求和)
A_sum = A.sum(axis=[0, 1]) # 沿着行、列对矩阵求和,等价于对矩阵所有元素求和
A_sum_axis0, A_sum_axis1, A_sum

1.8.1.2 平均值
同样,我们可对张量所有元素求平均,也可以指定按列/行元素求平均:
A = torch.arange(20, dtype=torch.double).reshape(5, 4)A_mean = A.mean() # 全部元素求平均
A_mean0 = A.mean(axis=0) # 将矩阵列向量求平均(沿着行挨个列向量求平均)
A_mean1 = A.mean(axis=1) # 将矩阵行向量求平均(沿着列挨个行向量求平均)
A_mean, A_mean0, A_mean1

1.8.2 PCA主成分分析
PCA(principal components analysis)主成分分析,亦称主分量分析,旨在利用降维的思想,把多指标转化为少数几个综合指标。
在统计学中,主成分分析PCA是一种简化数据集的技术。它是一个线性变换。这个变换把数据变换到一个新的坐标系统中,使得任何数据投影的第一大方差在第一个坐标(称为第一主成分)上,第二大方差在第二个坐标(第二主成分)上,依次类推。主成分分析经常用于减少数据集的维数,同时保持数据集的对方差贡献最大的特征。
1.8.3 稀疏矩阵压缩
仅存储矩阵中的非0元素,同时存储该元素所在矩阵中的行标和列标。
其中常用的有:按列压缩(CSC, Compressed sparse column)、按行压缩(CSR, Compressed sparse row)等。
2. 微积分
在深度学习中,我们“训练模型”使其变得更好,即最小化一个损失函数(loss function)。
我们“训练”模型只能将模型与我们实际见到的数据相拟合,因此可将此任务分解为两个关键问题:
- 优化(optimization):用模型拟合观察数据的过程。
- 泛化(generalization):指导生成有效性超出用于训练的数据集本身的模型。
2.1 导数 & 微分
假设有一个函数 f : R → R f:\mathbb{R}→\mathbb{R} f:R→R,其输入和输出都是标量。若其导数存在,则极限被定义为:
f ′ ( x ) = lim h → 0 f ( x + h ) − f ( x ) h f'(x) = \lim_{h→0} \frac{f(x+h)-f(x)}{h} f′(x)=h→0limhf(x+h)−f(x)
若 f ′ ( a ) f'(a) f′(a)存在,则称f在a处可微(differentiable)
2.2 偏导数
在深度学习中,通常需要用到多变量,我们将其思想推广到多元函数(multivariate function)
设 y = f ( x 1 , x 2 , ⋯ , x n ) y = f(x_1,x_2,\cdots,x_n) y=f(x1,x2,⋯,xn),则y关于第i个参数x_i的偏导数(Partial Derivative)为:
∂ y ∂ x i = lim h → 0 f ( x 1 , ⋯ , x i − 1 , x i + h , x i + 1 , ⋯ , x n ) − f ( x 1 , ⋯ , x i , ⋯ , x n ) h \frac{\partial y}{\partial x_i}=\lim_{h→0} \frac{f(x_1, \cdots, x_{i-1}, x_i+h,x_{i+1},\cdots, x_n)-f(x_1,\cdots,x_i,\cdots,x_n)}{h} ∂xi∂y=h→0limhf(x1,⋯,xi−1,xi+h,xi+1,⋯,xn)−f(x1,⋯,xi,⋯,xn)
2.3 梯度
假设有一个函数 f : R n → R f:\mathbb{R^n}→\mathbb{R} f:Rn→R,其输入是一个n维向量 x = [ x 1 , x 2 , ⋯ , x n ] \boldsymbol{x}=[x_1, x_2, \cdots, x_n] x=[x1,x2,⋯,xn],其输出是一个标量,则函数 f ( x ) f(\boldsymbol{x}) f(x)相对于 x \boldsymbol{x} x的梯度是一个包含n个偏导数的向量:
∇ x f ( x ) = [ ∂ f ( x ) ∂ x 1 , ∂ f ( x ) ∂ x 2 , ⋯ , ∂ f ( x ) ∂ x n ] \nabla_{x}f(\boldsymbol{x})=[\frac{\partial f(\boldsymbol{x})}{\partial x_1},\frac{\partial f(\boldsymbol{x})}{\partial x_2},\cdots,\frac{\partial f(\boldsymbol{x})}{\partial x_n}] ∇xf(x)=[∂x1∂f(x),∂x2∂f(x),⋯,∂xn∂f(x)]
假设 x \boldsymbol{x} x为n维向量,在对多元函数求微分时经常使用以下规则:
- 对于所有 A ∈ R m × n A \in \mathbb{R}^{m×n} A∈Rm×n,都有 ∇ x A x = A T \nabla_{x}Ax=A^{T} ∇xAx=AT
- 对于所有 A ∈ R n × m A \in \mathbb{R}^{n×m} A∈Rn×m,都有 ∇ x x T A = A \nabla_{x}x^{T}A=A ∇xxTA=A
- 对于所有 A ∈ R n × n A \in \mathbb{R}^{n×n} A∈Rn×n,都有 ∇ x x T A x = ( A + A T ) x \nabla_{x}x^{T}Ax=(A+A^{T})x ∇xxTAx=(A+AT)x
- ∇ x ∣ ∣ x ∣ ∣ 2 = ∇ x x T x = 2 x \nabla_{x}||\boldsymbol{x}||^{2}=\nabla_{x}\boldsymbol{x}^{T}\boldsymbol{x}=2\boldsymbol{x} ∇x∣∣x∣∣2=∇xxTx=2x
同样,对于任何矩阵 X X X,都有 ∇ X ∣ ∣ X ∣ ∣ F 2 = 2 X \nabla_{X}||X||_{F}^2=2X ∇X∣∣X∣∣F2=2X。
例如,定义一个函数:
f ( x ) = k T x + b f(\boldsymbol{x})=\boldsymbol{k^{T}x} + \boldsymbol{b} f(x)=kTx+b
其中:
k T = [ 1 , 3 , 5 ] b T = [ 1 , 2 , 3 ] k^{T}=[1,3,5] \\ b^{T}=[1,2,3] kT=[1,3,5]bT=[1,2,3]
我们可采用自动微分的方式对示例这种函数求梯度,具体可参考下面两例。
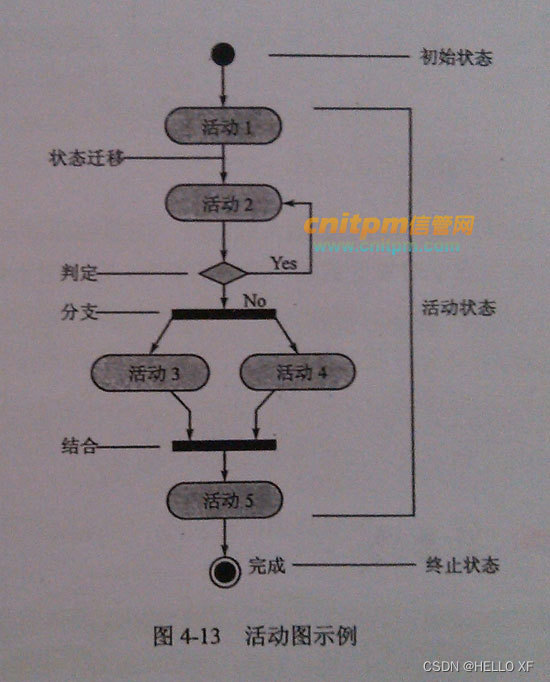
2.4 Hessian矩阵
Hessian矩阵,中文译名为海森矩阵。
假设有一个函数 f : R n → R f:\mathbb{R^n}→\mathbb{R} f:Rn→R,其Hessian矩阵定义如下:
H ( f ) = [ ∂ 2 f ∂ x 1 2 ∂ 2 f ∂ x 1 ∂ x 2 ⋯ ∂ 2 f ∂ x 1 ∂ x n ∂ 2 f ∂ x 2 ∂ x 1 ∂ 2 f ∂ x 2 2 ⋯ ∂ 2 f ∂ x 2 ∂ x n ⋮ ⋮ ⋱ ⋮ ∂ 2 f ∂ x n ∂ x 1 ∂ 2 f ∂ x n ∂ x 2 ⋯ ∂ 2 f ∂ x n 2 ] H(f)= \begin{bmatrix} \frac{\partial^{2} f}{\partial x_1^{2}} & \frac{\partial^{2} f}{\partial x_1 \partial x_2} & \cdots & \frac{\partial^{2} f}{\partial x_1 \partial x_n} \\ \frac{\partial^{2} f}{\partial x_2 \partial x_1} & \frac{\partial^{2} f}{\partial x_2^{2}} & \cdots & \frac{\partial^{2} f}{\partial x_2 \partial x_n} \\ \vdots & \vdots & \ddots & \vdots \\ \frac{\partial^{2} f}{\partial x_n \partial x_1} & \frac{\partial^{2} f}{\partial x_n \partial x_2} & \cdots & \frac{\partial^{2} f}{\partial x_n^{2}} \end{bmatrix} H(f)= ∂x12∂2f∂x2∂x1∂2f⋮∂xn∂x1∂2f∂x1∂x2∂2f∂x22∂2f⋮∂xn∂x2∂2f⋯⋯⋱⋯∂x1∂xn∂2f∂x2∂xn∂2f⋮∂xn2∂2f
- 当H为正定矩阵时,则该点是极小值点
- 当H为负定矩阵时,则该点是极大值点
- 当H为不定矩阵时,则该点是非极值点
- 当H为半正定矩阵/半负定矩阵时, f ( x 1 , x 2 , ⋯ , x n ) f(x_1,x_2,\cdots,x_n) f(x1,x2,⋯,xn)则该点是 “可疑”极值点,需结合其他方法判定。
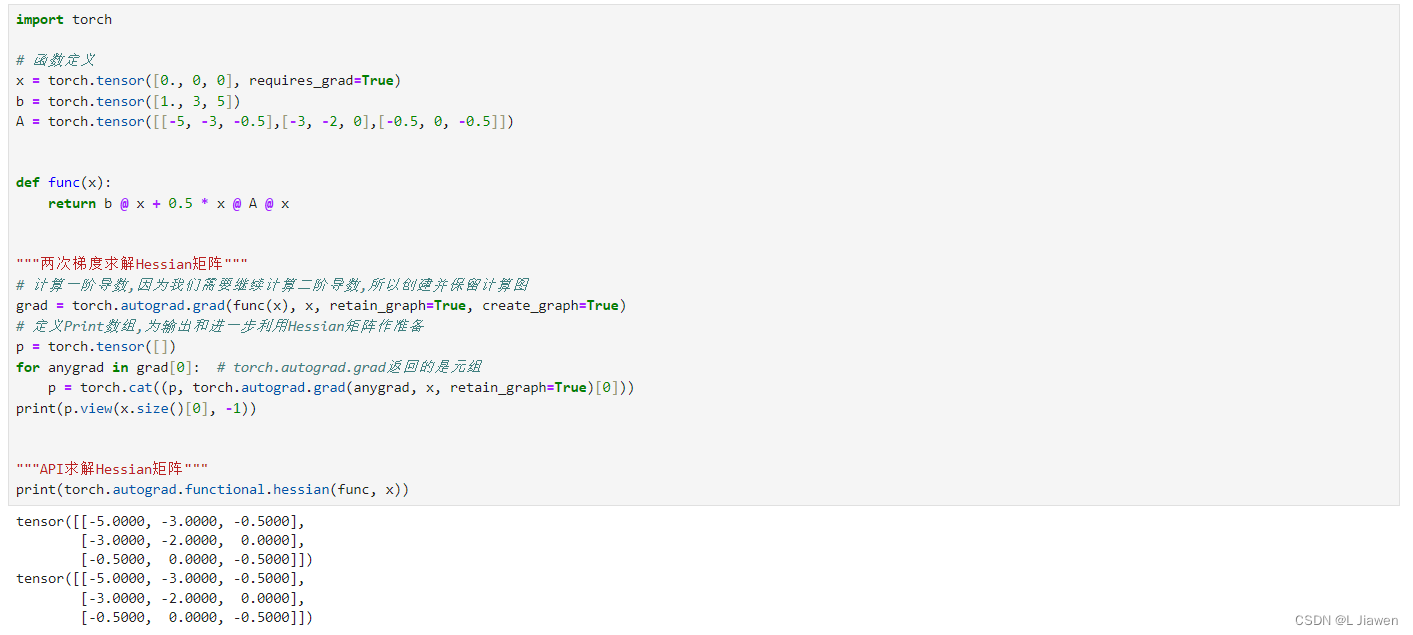
定义一个函数:
f ( x ) = b T x + 1 2 x T A x f(\boldsymbol{x})=\boldsymbol{b^{T}x}+\frac{1}{2} \boldsymbol{x^{T}Ax} f(x)=bTx+21xTAx
其中:
b T = [ 1 , 3 , 5 ] A = [ − 5 − 3 − 0.5 − 3 − 2 0 − 0.5 0 − 0.5 ] b^{T}=[1,3,5] \\ A = \begin{bmatrix} -5 & -3 & -0.5 \\ -3 & -2 & 0 \\ -0.5 & 0 & -0.5 \end{bmatrix} bT=[1,3,5]A= −5−3−0.5−3−20−0.50−0.5
本例代码采用自动微分的方式,对上述函数对上述函数原点处的Hessian矩阵进行计算:
import torch# 函数定义
x = torch.tensor([0., 0, 0], requires_grad=True)
b = torch.tensor([1., 3, 5])
A = torch.tensor([[-5, -3, -0.5],[-3, -2, 0],[-0.5, 0, -0.5]])def func(x):return b @ x + 0.5 * x @ A @ x"""两次梯度求解Hessian矩阵"""
# 计算一阶导数,因为我们需要继续计算二阶导数,所以创建并保留计算图
grad = torch.autograd.grad(func(x), x, retain_graph=True, create_graph=True)
# 定义Print数组,为输出和进一步利用Hessian矩阵作准备
p = torch.tensor([])
for anygrad in grad[0]: # torch.autograd.grad返回的是元组p = torch.cat((p, torch.autograd.grad(anygrad, x, retain_graph=True)[0]))
print(p.view(x.size()[0], -1))"""API求解Hessian矩阵"""
print(torch.autograd.functional.hessian(func, x))
2.5 Jacobian矩阵
Jacobian矩阵,中文译名为雅可比矩阵。
假设有一个函数 f : R n → R m \boldsymbol{f}:\mathbb{R^n}→\mathbb{R^m} f:Rn→Rm,其由多个函数组成:
f = [ f 1 ( x 1 , x 2 , ⋯ , x n ) f 2 ( x 1 , x 2 , ⋯ , x n ) ⋮ f m ( x 1 , x 2 , ⋯ , x n ) ] \boldsymbol{f} = \begin{bmatrix} f_{1}(x_1, x_2, \cdots, x_n)\\ f_{2}(x_1, x_2, \cdots, x_n)\\ \vdots \\ f_{m}(x_1, x_2, \cdots, x_n)\\ \end{bmatrix} f= f1(x1,x2,⋯,xn)f2(x1,x2,⋯,xn)⋮fm(x1,x2,⋯,xn)
其雅可比矩阵定义为:
J ( f ) = [ ∂ f 1 ∂ x 1 ∂ f 1 ∂ x 2 ⋯ ∂ f 1 ∂ x n ∂ f 2 ∂ x 1 ∂ f 2 ∂ x 2 ⋯ ∂ f 2 ∂ x n ⋮ ⋮ ⋱ ⋮ ∂ f n ∂ x 1 ∂ f n ∂ x 2 ⋯ ∂ f n ∂ x n ] J(\boldsymbol{f}) = \begin{bmatrix} \frac{\partial f_1}{\partial x_1} & \frac{\partial f_1}{\partial x_2} & \cdots & \frac{\partial f_1}{\partial x_n} \\ \frac{\partial f_2}{\partial x_1} & \frac{\partial f_2}{\partial x_2} & \cdots & \frac{\partial f_2}{\partial x_n} \\ \vdots & \vdots & \ddots & \vdots \\ \frac{\partial f_n}{\partial x_1} & \frac{\partial f_n}{\partial x_2} & \cdots & \frac{\partial f_n}{\partial x_n} \end{bmatrix} J(f)= ∂x1∂f1∂x1∂f2⋮∂x1∂fn∂x2∂f1∂x2∂f2⋮∂x2∂fn⋯⋯⋱⋯∂xn∂f1∂xn∂f2⋮∂xn∂fn
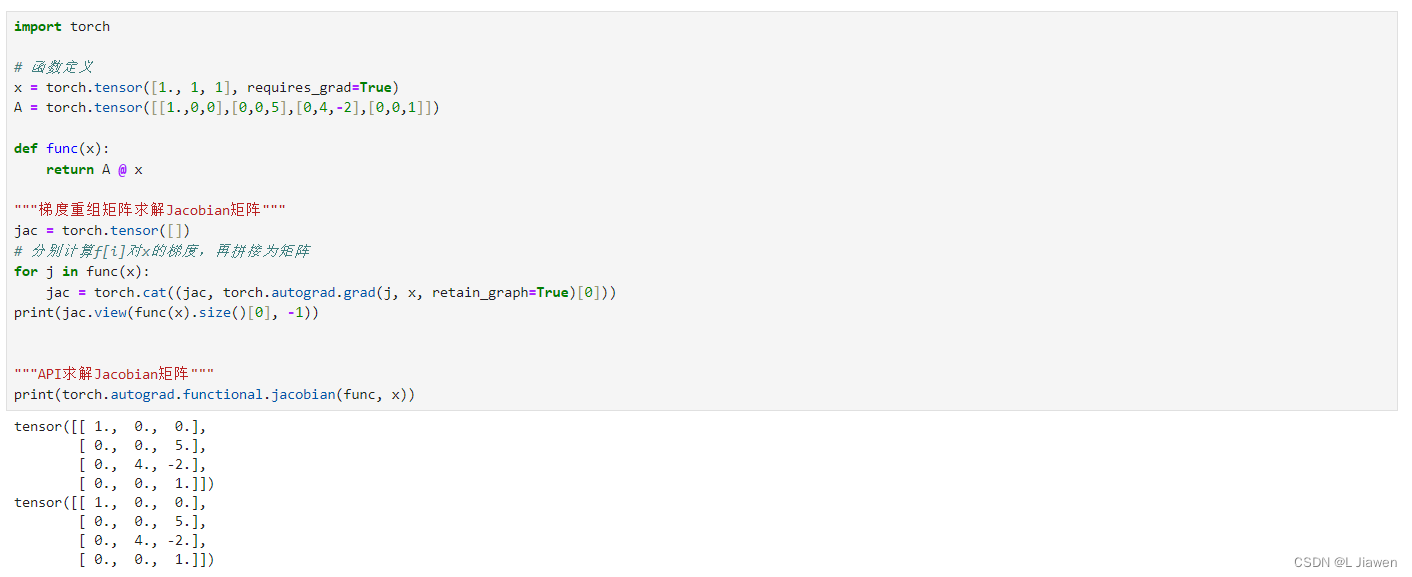
定义一个函数( f : R 3 → R 4 \boldsymbol{f}:\mathbb{R^3}→\mathbb{R^4} f:R3→R4):
f ( x ) = [ f 1 ( x 1 , x 2 , x 3 ) f 2 ( x 1 , x 2 , x 3 ) f 3 ( x 1 , x 2 , x 3 ) f 4 ( x 1 , x 2 , x 3 ) ] = [ x 1 5 x 3 4 x 2 − 2 x 3 x 3 ] \boldsymbol{f}(\boldsymbol{x})=\begin{bmatrix} f_{1}(x_1,x_2,x_3) \\ f_{2}(x_1,x_2,x_3) \\ f_{3}(x_1,x_2,x_3) \\ f_{4}(x_1,x_2,x_3) \\ \end{bmatrix} =\begin{bmatrix} x_1 \\ 5x_3 \\ 4x_2-2x_3 \\ x_3 \\ \end{bmatrix} f(x)= f1(x1,x2,x3)f2(x1,x2,x3)f3(x1,x2,x3)f4(x1,x2,x3) = x15x34x2−2x3x3
import torch# 函数定义
x = torch.tensor([1., 1, 1], requires_grad=True)
A = torch.tensor([[1.,0,0],[0,0,5],[0,4,-2],[0,0,1]])def func(x):return A @ x"""梯度重组矩阵求解Jacobian矩阵"""
jac = torch.tensor([])
# 分别计算f[i]对x的梯度,再拼接为矩阵
for j in func(x):jac = torch.cat((jac, torch.autograd.grad(j, x, retain_graph=True)[0]))
print(jac.view(func(x).size()[0], -1))"""API求解Jacobian矩阵"""
print(torch.autograd.functional.jacobian(func, x))
相关文章:
【Python · PyTorch】线性代数 微积分
本文采用Python及PyTorch版本如下: Python:3.9.0 PyTorch:2.0.1cpu 本文为博主自用知识点提纲,无过于具体介绍,详细内容请参考其他文章。 线性代数 & 微积分 1. 线性代数1.1 基础1.1.1 标量1.1.2 向量长度&…...
建模和图表工具:Software Ideas Modeler Crack
用于图表、软件设计和分析的 CASE 工具 Software Ideas Modeler 是一款智能CASE 工具和 图表软件,支持 UML、SysML、ERD、BPMN、ArchiMate、流程图、用户故事、线框图。 提升用户体验和人工智能集成 - Software Ideas Modeler 14.05 最近发布的 14.05 版本带来了一…...
Android开发,车载通讯应用——binder通讯原理解析
Binder简单理解 简单来说,Binder 就是用来Client 端和 Server 端通信的。并且 Client 端和 Server 端 可以在一个进程也可以不在同一个进程,Client 可以向 Server 端发起远程调用,也可以向Server传输数据(当作函数参数来传&#…...

[算法]求n!在m进制下末尾有多少个0
参考链接:求n!在m进制下末尾0的个数_.!零n,,m-CSDN博客 我们这里和参考链接不同 使用结构体去存储每个因数的信息 然后使用变量index作为索引,其最终值为因数的个数 具体原理: 例子1:求9!在10进制下的…...

mysql之用户管理、权限管理、密码管理
用户管理 创建用户create user 杨20.0.0.13 identified by 123; 用户重命名rename user 杨20.0.0.13 to yang20.0.0.13; 删除用户drop user 杨20.0.0.13; 权限管理 查看用户权限show grants for 杨20.0.0.13; 赋予用户权限grant all privileges on *.* to 杨localhost id…...

图情档核心期刊 | 北大核心、CSSCI、CSCD
中文核心期刊要目总览(A Guide to the Core Journal of China, 简称北大核心): 主办单位:北京大学图书馆更新频率:北大核心在2008年之前每4年更新研究和编制出版一次,2008年之后,改为…...
Mac上具好用的屏幕录像工具(Omi录屏专家)Screen Recorder By Omi Mac 下载安装详细教程
Omi 录屏专家 是 Mac 上的一款出色的录音工具,它让您能够在Mac电脑上轻松录制和保存高质量音频。这款应用拥有简单直观的操作界面,无论我们水平如何,都可以轻松捕捉录制卓越的音质和录像视频。 该版本的 Omi 安装后可以直接支持最高 4K 60帧…...

牛客网刷题-(8)
🌈write in front🌈 🧸大家好,我是Aileen🧸.希望你看完之后,能对你有所帮助,不足请指正!共同学习交流. 🆔本文由Aileen_0v0🧸 原创 CSDN首发🐒 如…...
oracle 重启步骤及踩坑经验
oracle 重启步骤及踩坑经验 标准重启步骤 切换到oracle用户 su - oracle关闭监听 lsnrctl stop杀掉oracle有关进程 ps -ef|grep $ORACLE_SID|grep -v ora_|grep LOCALNO|awk {print $2}|xargs kill -9#查询pid ps -ef|grep $ORACLE_SID|grep -v ora_|grep LOCALNO|awk {p…...
)
处理mysql数据量大查询缓慢问题(最少百万才有差别)
我建了两个表,一个售后单表,一个售后商品明细表,都是五十个字段。 select * FROM (select id, as_id, as_date, outer_as_id, so_id, type, created, modified, status, status_name, shop_status, shop_status_name, remark, question_type,…...
element-plus走马灯不显示
问题描述 依赖正确,代码用法正确,但是element-plu走马灯就是不显示!! <div class"content"><el-carousel height"150px" width"200px"><el-carousel-item v-for"item in 4&qu…...
【精】UML及软件管理工具汇总
目录 1 老七工具(规划质量) 1.1 因果图(鱼骨图、石川图) 1.2 控制图 1.3 流程图:也称过程图 1.4 核查表:又称计数表 1.5 直方图 1.6 帕累托图 1.7 散点图…...
【uniapp+vue3】scroll-view实现纵向自动滚动及swiper实现纵向自动滚动
scroll-view本身不支持自动滚动,通过scroll-top属性控制滚动,但是不可以循环滚动 <scroll-view class"notice-bar" scroll-y"true" ref"scrollViewRef" :scroll-top"data.scrollViewTop"scroll-with-animati…...
和this.$refs[‘tagInput‘].focus()区别)
this.refs[‘tagInput‘].refs.input.focus()和this.$refs[‘tagInput‘].focus()区别
this.$refs[tagInput].$refs.input.focus()和this.$refs[tagInput].focus()两者之间的选择取决于你的组件结构和如何访问DOM元素。 1.this.$refs[tagInput].$refs.input.focus(): 2.这种语法假设你的this.$refs[tagInput]是一个组件实例,并且这个组件实例有一个名为…...

电脑硬件坏了,如何维修?
在电子设备日益普及的今天,电脑已成为很多人生活和工作中不可或缺的工具,然而在使用过程中很容易遇见电脑故障之类的问题,这些问题十有八九来自硬件,那么针对电脑硬件问题,该如何维修? 一般来说,…...

elementplus日期时间选择器组件显示很窄
问题描述 似乎是elementplus原生组件的宽度是和父组件相关的 只要父组件很窄就会让弹窗也很窄,但其实两者的宽度不必有这种限制 解决思路 打开控制条查看元素位置以及css样式的class名 发现类名为el-picker-panel__body 尝试重构 css内写样式 .el-picker-pane…...

第三方软件测评选择远程测试好还是现场测试好?
如今许多软件企业在软件开发过程完成之后,会将软件测试工作交由第三方软件测评机构来进行,那么做第三方软件测试时,远程测试和现场测试哪个更好呢?我想这是许多软件企业都十分关注的问题,今天卓码软件测评小编将对以上问题作出简…...

HTTPS协议:保障网络安全的加密通信协议
在当今数字化时代,网络安全问题备受关注。为了保护用户的隐私和数据安全,HTTPS协议应运而生。本文将介绍HTTPS协议的定义、工作原理以及其在网络通信中的重要性。 一、HTTPS协议的定义 HTTPS(Hypertext Transfer Protocol Secure)…...
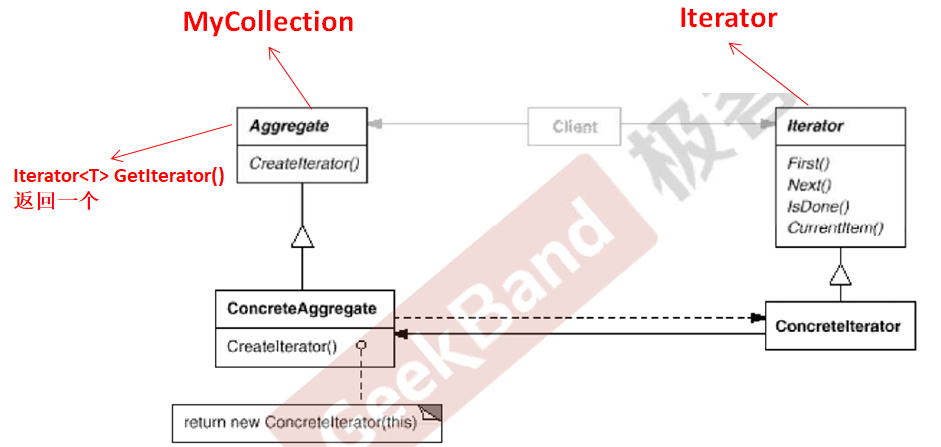
C++设计模式_21_Iterator 迭代器(理解;面向对象的迭代器已过时;C++中使用泛型编程的方式实现)
Iterator 迭代器也是属于“数据结构”模式。GoF中面向对象的迭代器已经过时,C中目前使用泛型编程的方式实现,其他语言还在使用面向对象的迭代器。 文章目录 1. 动机(Motivation)2. 模式定义3. Iterator 迭代器代码分析4. 面向对象的迭代器与泛型编程实现…...
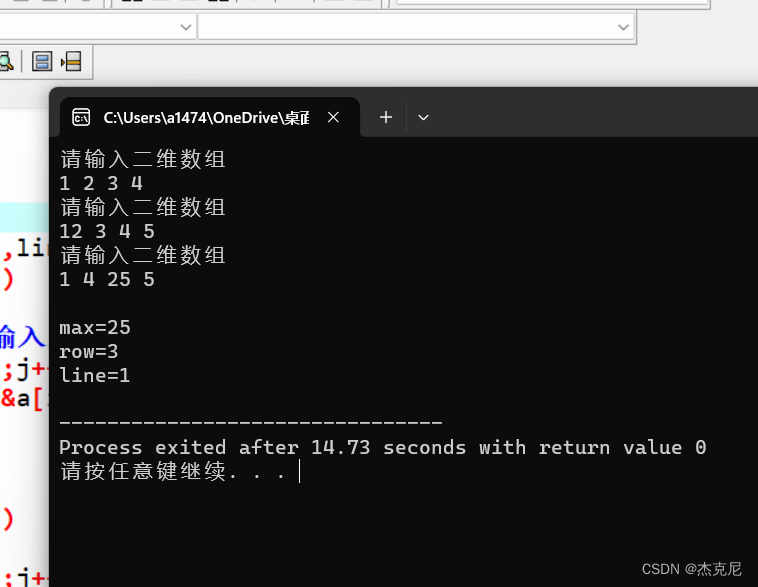
有一个 3*4 的矩阵,找出其中值最大的元素,及其行列号
1解题思路: 首先学会输入二维数组;然后知道如何比较求最大值;最后就是格式问题; 2代码: #include<stdio.h> int main() {int a[3][4];int i,j,max,row,line;for(i0;i<3;i){printf("请输入二维数组\n&…...

Perplexity法律文献搜索实战指南:7步构建精准检索式,避开90%的无效结果
更多请点击: https://codechina.net 第一章:Perplexity法律文献搜索实战指南:7步构建精准检索式,避开90%的无效结果 Perplexity 作为面向专业研究者的AI搜索工具,在法律文献检索中展现出远超通用搜索引擎的语义理解与…...

终极Mac菜单栏整理神器:Ice让你的macOS界面瞬间清爽高效!
终极Mac菜单栏整理神器:Ice让你的macOS界面瞬间清爽高效! 【免费下载链接】Ice Powerful menu bar manager for macOS 项目地址: https://gitcode.com/GitHub_Trending/ice/Ice 还在为Mac顶部菜单栏拥挤不堪而烦恼吗?每次找图标都要眯…...

在Node.js后端服务中集成Taotoken调用多模型AI功能的指南
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在Node.js后端服务中集成Taotoken调用多模型AI功能的指南 对于Node.js开发者而言,在后端服务中集成AI能力正变得日益普…...
)
蓝桥杯嵌入式备赛:手把手搞定AT24C02 EEPROM读写(附CubeMX配置与常见Bug修复)
蓝桥杯嵌入式竞赛实战:AT24C02 EEPROM高效读写全攻略 1. 赛前准备:理解I2C与EEPROM的核心机制 在蓝桥杯嵌入式竞赛中,AT24C02这类EEPROM器件常被用作非易失性存储解决方案。与常见Flash存储器不同,EEPROM支持字节级擦写…...

拷贝漫画第三方客户端完全解析:解锁高效漫画阅读新体验
拷贝漫画第三方客户端完全解析:解锁高效漫画阅读新体验 【免费下载链接】copymanga 拷贝漫画的第三方APP,仅提供基础功能,更多丰富功能请移步官方版本 项目地址: https://gitcode.com/gh_mirrors/co/copymanga 在数字阅读日益普及的今…...

3步掌握城通网盘解析工具:彻底告别30秒等待与限速困扰
3步掌握城通网盘解析工具:彻底告别30秒等待与限速困扰 【免费下载链接】ctfileGet 获取城通网盘一次性直连地址 项目地址: https://gitcode.com/gh_mirrors/ct/ctfileGet 还在为城通网盘下载的漫长等待和蜗牛般的速度而烦恼吗?城通网盘作为国内广…...

实战剖析:利用Fluxion构建WiFi钓鱼热点与密码捕获
1. 环境准备与工具安装 在开始使用Fluxion进行WiFi安全测试之前,我们需要确保具备合适的硬件和软件环境。首先,你需要一台支持监听模式的无线网卡,这是进行任何无线安全测试的基础硬件。我推荐使用RTL8812AU芯片的网卡,实测下来兼…...

【亲测免费】 TC8协议一致性测试文档
TC8协议一致性测试文档 【下载地址】TC8协议一致性测试文档 本仓库提供了一个重要的资源文件,即**TC8协议一致性测试文档**。该文档详细描述了汽车以太网ECU(电子控制单元)在不同网络层的一致性测试规范。具体包括以下三个部分:1.…...

【亲测免费】 工业自动化+Modbus通讯协议+libmodbus开源库+Windows x64编译教程
工业自动化Modbus通讯协议libmodbus开源库Windows x64编译教程 【下载地址】工业自动化Modbus通讯协议libmodbus开源库Windowsx64编译教程 本资源适用于使用libmodbus开源库进行数据通信过程中的环境搭建过程。由于最新版本的libmodbus并不能通过官网提供的教程实现Windows下的…...

如何永久免费使用IDM下载管理器:无需破解的智能重置方案
如何永久免费使用IDM下载管理器:无需破解的智能重置方案 【免费下载链接】idm-trial-reset Use IDM forever without cracking 项目地址: https://gitcode.com/gh_mirrors/id/idm-trial-reset 想要永久免费使用Internet Download Manager这款强大的下载加速工…...