040-第三代软件开发-全新波形抓取算法

第三代软件开发-全新波形抓取算法
文章目录
- 第三代软件开发-全新波形抓取算法
- 项目介绍
- 全新波形抓取算法
- 代码小解
关键字:
Qt、
Qml、
抓波、
截获、
波形
项目介绍
欢迎来到我们的 QML & C++ 项目!这个项目结合了 QML(Qt Meta-Object Language)和 C++ 的强大功能,旨在开发出色的用户界面和高性能的后端逻辑。
在项目中,我们利用 QML 的声明式语法和可视化设计能力创建出现代化的用户界面。通过直观的编码和可重用的组件,我们能够迅速开发出丰富多样的界面效果和动画效果。同时,我们利用 QML 强大的集成能力,轻松将 C++ 的底层逻辑和数据模型集成到前端界面中。
在后端方面,我们使用 C++ 编写高性能的算法、数据处理和计算逻辑。C++ 是一种强大的编程语言,能够提供卓越的性能和可扩展性。我们的团队致力于优化代码,减少资源消耗,以确保我们的项目在各种平台和设备上都能够高效运行。
无论您是对 QML 和 C++ 开发感兴趣,还是需要我们为您构建复杂的用户界面和后端逻辑,我们都随时准备为您提供支持。请随时联系我们,让我们一同打造现代化、高性能的 QML & C++ 项目!
重要说明☝
☀该专栏在第三代软开发更新完将涨价
全新波形抓取算法
嘿嘿嘿,如果有碰巧看过我之前的抓波算法的话,那么可以在看看这里,这个版本是针对送检使用的演示版本,针对是信号发生器产出的纯净波形。在实际使用中发现不管怎么调节参数都不理想。所以诞生了新的抓博算法。
链接在这里:https://dreamlife.blog.csdn.net/article/details/128716820

新的抓博算法简单除暴,直接判断峰峰值是否超过阈值,如果超过阈值了,那就行波形分析,入股没有继续抓博。核心算法如下:
/*** @brief XXXX::wavesCatch 提取波峰函数* @param iAisle*/
bool XXXX::wavesCatch(int iAisle)
{// @ldm_wavesStartIndex = 0;m_wavesEndIndex = 0;m_yData.resize(m_windowDataSize - m_stimeNumber);m_yData.at(0) = m_windowData[iAisle+1].at(0+m_stimeNumber);m_yData.at(1) = m_windowData[iAisle+1].at(1+m_stimeNumber);for(int i=2;i<m_windowDataSize-m_stimeNumber;i++){m_yData.at(i) = (m_windowData[iAisle+1].at(i+m_stimeNumber)+m_windowData[iAisle+1].at(i-1+m_stimeNumber)+m_windowData[iAisle+1].at(i-2+m_stimeNumber))/3;}m_wavesMaxIndex = m_wavesMaxIndex - m_stimeNumber;m_wavesMinIndex = m_wavesMinIndex - m_stimeNumber;//if(m_wavesMaxIndex<m_wavesMinIndex){// m_wavesStartIndexfor(int iStart=m_wavesMaxIndex-2;iStart>=2;iStart--){// 在平均值附近if(qAbs(m_yData.at(iStart) - m_wavesAvg) <= 0.15*qAbs(m_wavesMax - m_wavesAvg)){// B.极小值if((m_yData.at(iStart)<=m_yData.at(iStart+1) && m_yData.at(iStart) <= m_yData.at(iStart-1))// 找到快速增加点|| (m_yData.at(iStart+2) > m_yData.at(iStart+1) > m_yData.at(iStart)&& (m_yData.at(iStart+2) -m_yData.at(iStart+1)) > 5*(m_yData.at(iStart+1) -m_yData.at(iStart)))){m_wavesStartIndex = iStart;break;}}}for(int iEnd=m_wavesMinIndex+2;iEnd<int(m_yData.size())-2;iEnd++){// 在平均值附近if(qAbs(m_yData.at(iEnd) - m_wavesAvg) <= 0.15*qAbs(m_wavesAvg - m_wavesMin)){// B.极大值if((m_yData.at(iEnd)>=m_yData.at(iEnd+1) && m_yData.at(iEnd) >= m_yData.at(iEnd-1))// 找到平缓点|| (m_yData.at(iEnd-2) < m_yData.at(iEnd-1) < m_yData.at(iEnd)&& (m_yData.at(iEnd-1) -m_yData.at(iEnd-2)) > 5*(m_yData.at(iEnd) -m_yData.at(iEnd-1)))){m_wavesEndIndex = iEnd;break;}}}}else{for(int iStart=m_wavesMinIndex-2;iStart>=2;iStart--){// 在平均值附近if(qAbs(m_yData.at(iStart) - m_wavesAvg) <= 0.15*qAbs(m_wavesAvg - m_wavesMin)){// B.极大值if((m_yData.at(iStart)>=m_yData.at(iStart+1) && m_yData.at(iStart) >= m_yData.at(iStart-1))// 找到快速增加点|| (m_yData.at(iStart+2) < m_yData.at(iStart+1) < m_yData.at(iStart)&& (m_yData.at(iStart+1) -m_yData.at(iStart+2)) > 5*(m_yData.at(iStart) -m_yData.at(iStart-1)))){m_wavesStartIndex = iStart;break;}}}for(int iEnd=m_wavesMaxIndex+2;iEnd<int(m_yData.size())-1;iEnd++){// 在平均值附近if(qAbs(m_yData.at(iEnd) - m_wavesAvg) <= 0.15*qAbs(m_wavesMax - m_wavesAvg)){// B.极小值if((m_yData.at(iEnd)<=m_yData.at(iEnd+1) && m_yData.at(iEnd) <= m_yData.at(iEnd-1))// 找到平缓点|| (m_yData.at(iEnd-2) > m_yData.at(iEnd-1) > m_yData.at(iEnd)&& (m_yData.at(iEnd-2) -m_yData.at(iEnd-1)) > 5*(m_yData.at(iEnd-1) -m_yData.at(iEnd)))){m_wavesEndIndex = iEnd;break;}}}}if(m_wavesStartIndex == 0 || m_wavesEndIndex == 0)return false;emit signal_wavesCatched(iAisle,m_wavesStartIndex+m_stimeNumber,m_wavesMaxIndex+m_stimeNumber,m_wavesMinIndex+m_stimeNumber,m_wavesEndIndex+m_stimeNumber);return true;
}
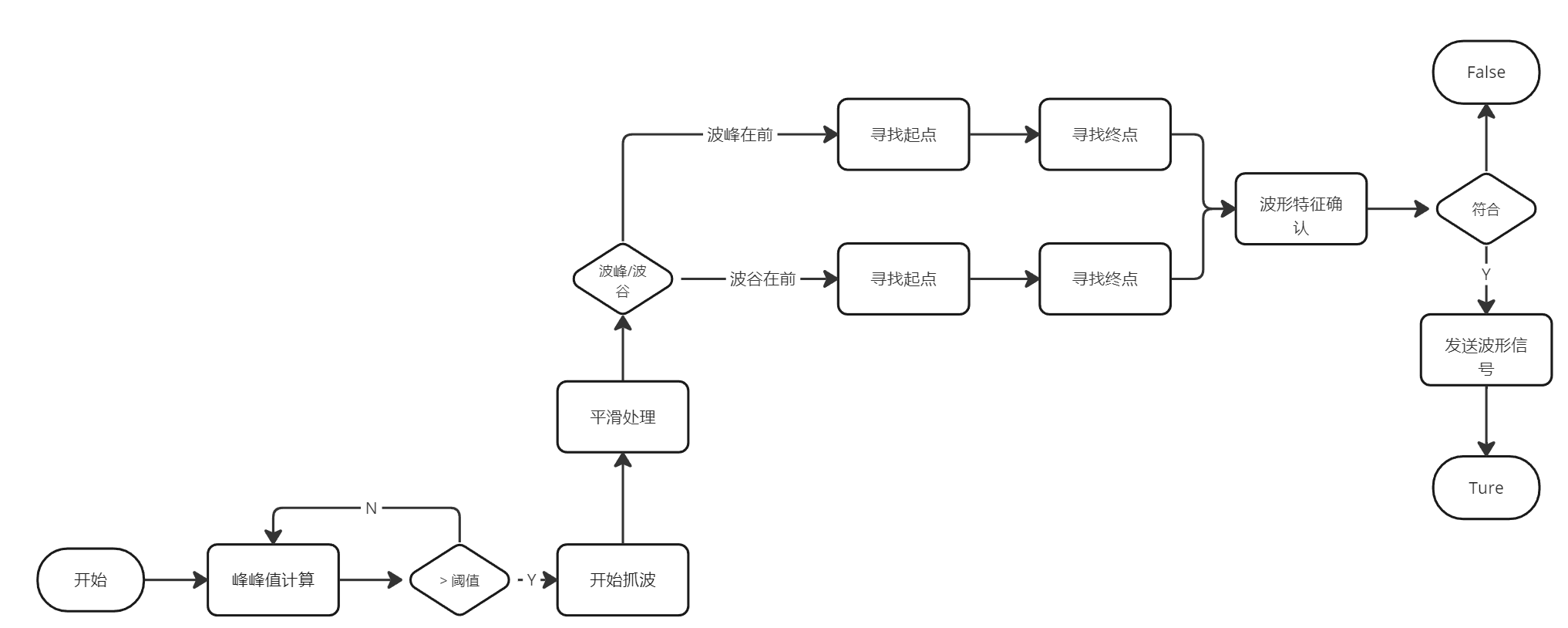
大致流程图如下:
代码小解
-
首先,我们对一些参数做了重置,这样保证我们开始的是一样的
m_wavesStartIndex = 0;m_wavesEndIndex = 0;m_yData.resize(m_windowDataSize - m_stimeNumber); -
紧接着,我们对我们的数据进行一个简单的平滑处理
m_yData.at(0) = m_windowData[iAisle+1].at(0+m_stimeNumber);m_yData.at(1) = m_windowData[iAisle+1].at(1+m_stimeNumber);for(int i=2;i<m_windowDataSize-m_stimeNumber;i++){m_yData.at(i) = (m_windowData[iAisle+1].at(i+m_stimeNumber)+m_windowData[iAisle+1].at(i-1+m_stimeNumber)+m_windowData[iAisle+1].at(i-2+m_stimeNumber))/3;} -
接下来,我们需要把我们之前算好的极大值和极小值做一个坐标转换
m_wavesMaxIndex = m_wavesMaxIndex - m_stimeNumber;m_wavesMinIndex = m_wavesMinIndex - m_stimeNumber; -
接下来,我们通过判断极大值和极小值对应的坐标就可以判断出波峰在前还是波谷在前了,
if(m_wavesMaxIndex<m_wavesMinIndex) -
分别再找起点和重点
for(int iStart=m_wavesMaxIndex-2;iStart>=2;iStart--){// 在平均值附近if(qAbs(m_yData.at(iStart) - m_wavesAvg) <= 0.15*qAbs(m_wavesMax - m_wavesAvg)){// B.极小值if((m_yData.at(iStart)<=m_yData.at(iStart+1) && m_yData.at(iStart) <= m_yData.at(iStart-1))// 找到快速增加点|| (m_yData.at(iStart+2) > m_yData.at(iStart+1) > m_yData.at(iStart)&& (m_yData.at(iStart+2) -m_yData.at(iStart+1)) > 5*(m_yData.at(iStart+1) -m_yData.at(iStart)))){m_wavesStartIndex = iStart;break;}}}for(int iEnd=m_wavesMinIndex+2;iEnd<int(m_yData.size())-2;iEnd++){// 在平均值附近if(qAbs(m_yData.at(iEnd) - m_wavesAvg) <= 0.15*qAbs(m_wavesAvg - m_wavesMin)){// B.极大值if((m_yData.at(iEnd)>=m_yData.at(iEnd+1) && m_yData.at(iEnd) >= m_yData.at(iEnd-1))// 找到平缓点|| (m_yData.at(iEnd-2) < m_yData.at(iEnd-1) < m_yData.at(iEnd)&& (m_yData.at(iEnd-1) -m_yData.at(iEnd-2)) > 5*(m_yData.at(iEnd) -m_yData.at(iEnd-1)))){m_wavesEndIndex = iEnd;break;}}} -
判定一下波形特征,符合波形特征,就发出信号,同时返回true;不符合波形特征就返回False
if(m_wavesStartIndex == 0 || m_wavesEndIndex == 0)return false;emit signal_wavesCatched(iAisle,m_wavesStartIndex+m_stimeNumber,m_wavesMaxIndex+m_stimeNumber,m_wavesMinIndex+m_stimeNumber,m_wavesEndIndex+m_stimeNumber);return true;

相关文章:
040-第三代软件开发-全新波形抓取算法
第三代软件开发-全新波形抓取算法 文章目录 第三代软件开发-全新波形抓取算法项目介绍全新波形抓取算法代码小解 关键字: Qt、 Qml、 抓波、 截获、 波形 项目介绍 欢迎来到我们的 QML & C 项目!这个项目结合了 QML(Qt Meta-Object …...
分享一个基于asp.net的供销社农产品商品销售系统的设计与实现(源码调试 lw开题报告ppt)
💕💕作者:计算机源码社 💕💕个人简介:本人七年开发经验,擅长Java、Python、PHP、.NET、微信小程序、爬虫、大数据等,大家有这一块的问题可以一起交流! 💕&…...

Java基于SpringBoot的线上考试系统
1 摘 要 基于 SpringBoot 的在线考试系统网站,功能模块具有课程管理、成绩管理、教师管理、学生管理、考试管理以及基本信息的管理等,通过将系统分为管理员、授课教师以及学生,从不同的身份角度来对用户提供便利,将科技与教学模式…...

flask socketio 实时传值至html上【需补充实例】
目前版本如下 Flask-Cors 4.0.0 Flask-SocketIO 5.3.6from flask_socketio import SocketIO, emit 跨域问题网上的普通方法无法解决。 参考这篇文章解决 Flask教程(十九)SocketIO - 迷途小书童的Note迷途小书童的Note (xugaoxiang.com) app Flask(__name__) socketio Sock…...
C# Onnx P2PNet 人群检测和计数
效果 项目 代码 using Microsoft.ML.OnnxRuntime; using Microsoft.ML.OnnxRuntime.Tensors; using OpenCvSharp; using System; using System.Collections.Generic; using System.Drawing; using System.Linq; using System.Text; using System.Windows.Forms;namespace Onnx…...
idea提交代码一直提示 log into gitee
解决idea提交代码一直提示 log into gitee问题 文章目录 打开setting->Version control->gitee,删除旧账号,重新配置账号,删除重新登录就好 打开setting->Version control->gitee,删除旧账号,重新配置账号,删除重新登…...

ATECLOUD如何进行电源模块各项性能指标的测试?
ATECLOUD平台进行电源模块各项性能指标的测试是通过以下步骤实现的: 连接测试设备:将测试设备与云计算服务器连接,实现数据采集和远程控制。测试设备包括示波器、电子负载、电源、万用表等,这些设备通过纳米BOX连接到云测试平台上…...

Mysql查询训练——50道题
--1.学生表 Student(SId,Sname,Sage,Ssex) --SId 学生编号,Sname 学生姓名,Sage 出生年月,Ssex 学生性别 --2.课程表 Course(CId,Cname,TId) --CId 课程编号,Cname 课程名称,TId 教师编号 --3.教师表 Teacher(TId,Tname) --TId 教师编号,Tname 教师姓名 --4.成绩表 SC(SId…...
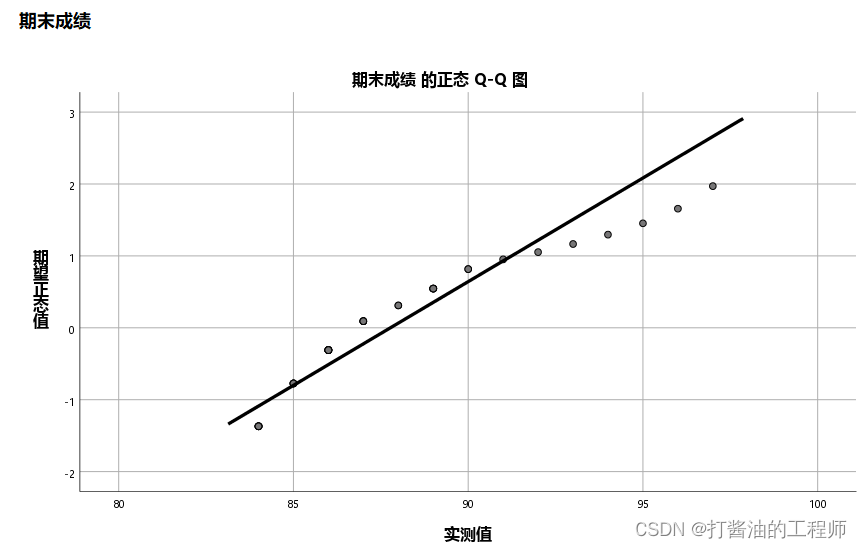
学习笔记|正态分布|图形法|偏度和峰度|非参数检验法|《小白爱上SPSS》课程:SPSS第三讲 | 正态分布怎么检验?看这篇文章就够了
目录 学习目的软件版本原始文档为什么要假设它服从正态分布呢?t检验一、图形法1、频数分布直方图解读 2、正态Q-Q图操作解读 3、正态P-P图SPSS实战操作解读 二、偏度和峰度解读: 三、非参数检验法注意事项 四、规范表达五、小结划重点 学习目的 SPSS第三讲 | 正态…...
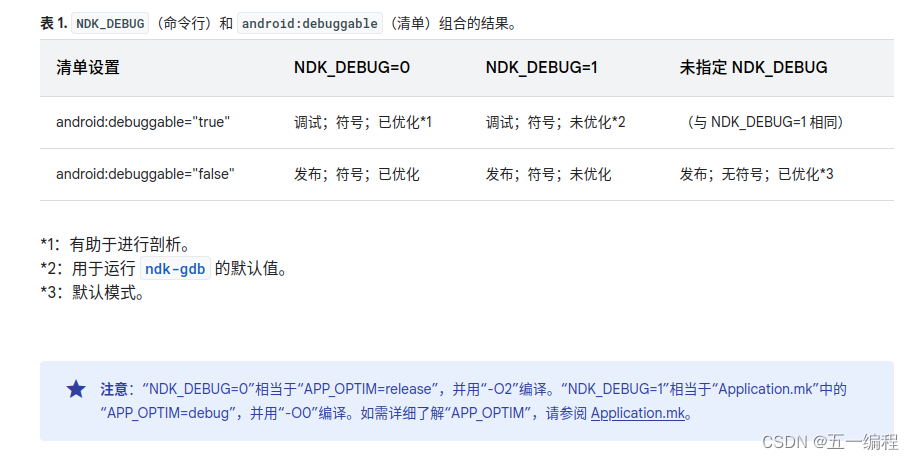
Android NDK开发详解之ndk-build 脚本
Android NDK开发详解之ndk-build 脚本 内部原理从命令行调用选项可调试 build 与发布 build要求 ndk-build 脚本使用 NDK 的基于 Make 的构建系统构建项目。我们针对 ndk-build 使用的 Android.mk 和 Application.mk 配置提供了更具体的文档。 内部原理 运行 ndk-build 脚本相…...

应用于智慧矿山的皮带跑偏视频分析AI算法
一、引言 随着科技的发展,人工智能技术已经在各个领域得到广泛应用。而在智慧矿山领域,皮带跑偏视频分析是其中一个重要的应用方向。本文将详细介绍皮带跑偏视频分析AI算法的原理,以期为智慧矿山的发展提供有益的参考。 二、算法原理 1. 视…...

vue3 UI组件优化之element-plus按需导入
如果不在意项目打包体积大小,正常来讲element-plus 是这样用的 import ElementPlus from element-plus //引入样式 import "element-plus/dist/index.css";app.use(ElementPlus);但是呢要是项目就用了几个弹窗提示什么的,全局引入包体积很大 …...
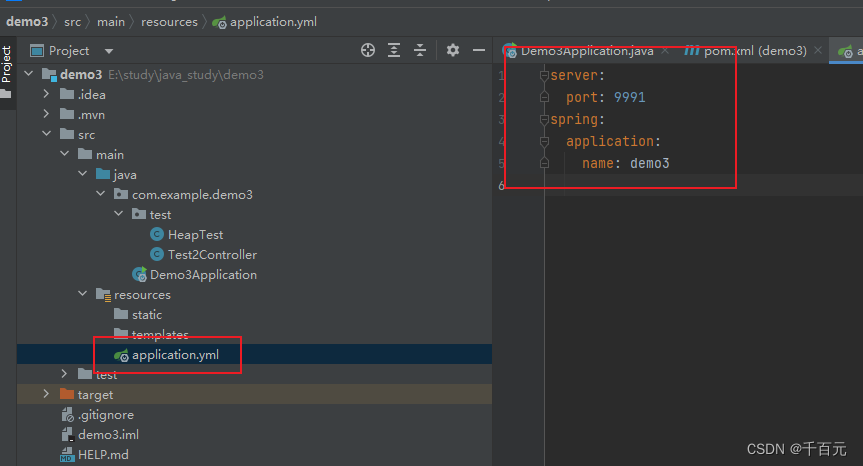
如何创建 Spring Boot 项目
如果有pom.xml有插件异常,可以先删除。 maven配置要配置好 然后yaml,再启动就行 server:port: 9991 spring:application:name: demo3参考 如何创建 Spring Boot 项目_创建springboot项目_良月初十♧的博客-CSDN博客...
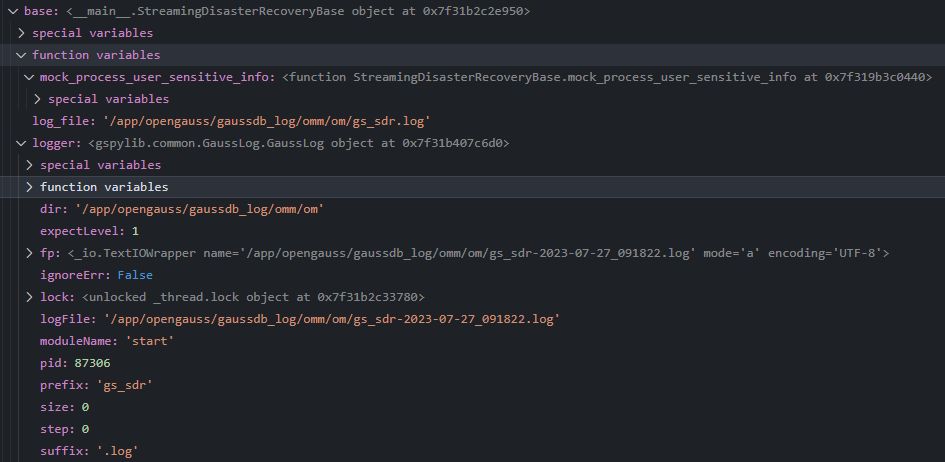
【经验分享】openGauss容灾集群搭建
gs_sdr命令代码解读 背景 openGauss推出了容灾架构,相比之前的一个集群主从架构,而容灾架构是两个集群间的数据同步。为了更深入了解其原理,本文试图通过阅读gs_sdr命令相关的代码来学习下相关的各种操作。 1.容灾搭建过程可以参考…...
)
互联网应用架构的演进(八大架构的演进过程)
文章目录 前言常见概念八大架构演进过程单机架构应用数据分离架构应用服务集群架构读写/主从分离架构冷热分离架构垂直分库架构微服务架构容器编排架构 前言 博主最近在学中间件,理解互联网应用架构的演进过程,对于理解中间件在整体结构中的定位是十分重…...

ROS自学笔记二十六:导航中激光雷达消息
在ROS导航中,激光雷达(Laser Scanner)通常被用于感知机器人周围的环境,进行障碍物检测和建图,以支持导航。下面是激光雷达的详细介绍以及一个示例: 激光雷达简介: 激光雷达是一种传感器&#…...

分类模型的评价指标
评价指标: 1、准确率 2、精准率 3、召回率 4、f1-Score 5、auc曲线 在了解评价指标在hi前,首先需要了解一种叫做混淆矩阵的东西 混淆矩阵: 真正例TP:本来正确的,分类到正确的类型 伪正例FP:本来是错误的&a…...

第五章 I/O管理 八、缓冲区管理
目录 一、定义 二、缓冲区的作用 三、单缓冲 1、定义: 2、例子1 3、例子2 四、双缓冲 1、定义: 2、例子1: 3、例子2: 五、单缓冲和双缓冲的区别 六、循环缓冲区 1、定义: 七、缓冲池 1、定义:…...
笔记软件推荐!亲测好用的8款笔记软件!
在以往的生活中,我们都需要用纸和笔做笔记,但随着时代的发展,许多人已经不再选择用这种传统方式,来记录自己重要的笔记了,他们都选择将重要的笔记用软件记录下来,将笔记保存在电脑里,更不容易…...

MPJQueryWrapper 用法
// 创建QueryWrapper对象MPJQueryWrapper<WebEvaluation> queryWrapper new MPJQueryWrapper<>();// 设置要查询的字段queryWrapper.select("u.nick_name", "u.avatar_url").select("wu.nick_name as relayToUserName", "ta.c…...

量子退火嵌入问题:原理、算法与优化实践
1. 量子退火与嵌入问题概述 量子退火是一种利用量子力学原理解决组合优化问题的前沿技术。与经典计算机不同,量子退火处理器通过量子隧穿效应在能量景观中寻找全局最优解,这种特性使其在特定类型的优化问题上展现出潜在优势。然而,量子处理器…...
)
二叉树‘找叶子’的三种姿势:从PTA真题到LeetCode变体(层次/先序/后序遍历对比)
二叉树‘找叶子’的三种姿势:从PTA真题到LeetCode变体(层次/先序/后序遍历对比) 在算法学习的道路上,二叉树遍历是每个程序员必须掌握的基本功。而"找叶子节点"这一看似简单的任务,却能衍生出多种解法&…...

编写程序统计职场上下级沟通频率,工作执行效果数据,搭建高效沟通模式,减少指令传达偏差工作失误。
构建一个职场上下级沟通频率与工作执行效果分析的商务智能示例项目,去营销化、中立化,仅用于学习与工程实践参考。一、实际应用场景描述在任何组织中,上下级沟通质量直接决定执行效率:- 上级布置任务 → 下级理解并执行 → 反馈结…...

YOLO算法集成 车道线识别 + 目标检测 +图像分割识别
YOLO车道线识别 目标检测 可行驶区域(Freespace)的综合应用引言 随着自动驾驶技术和智能交通系统的迅速发展,车辆环境感知技术变得愈加重要。准确地理解周围环境对于确保自动驾驶的安全性和可靠性至关重要。在众多的环境感知任务中…...

Yolov5算法界面 PyQt5 +.exe文件部署 yolo双击运行 yolo打包识别
介绍 Yolov5是一种基于深度学习的目标检测算法,PyQt5是一个Python编写的GUI框架,用于创建交互式界面。在部署和运行Yolov5模型时,结合PyQt5可以方便地创建一个用户友好的界面,并将代码打包为.exe文件以供其他人使用。 下面是一个简…...

基于MCP协议构建AI驱动的企业安全自动化平台
1. 项目概述:一个连接AI与安全工具的桥梁最近在折腾AI助手(比如Claude Desktop、Cursor)的扩展能力时,发现了一个挺有意思的项目:sanyambassi/thales-cdsp-crdp-mcp-server。乍一看这个仓库名,又是Thales&a…...
)
NotebookLM与国家智慧教育平台对接全路径(含教育部2024年最新接口规范V2.3解读)
更多请点击: https://intelliparadigm.com 第一章:NotebookLM教育领域应用概览 NotebookLM 是 Google 推出的基于 AI 的笔记增强型研究助手,专为深度阅读、知识整合与教学辅助设计。在教育场景中,它能将教师上传的 PDF 教材、课…...

如何一键下载推特上的所有媒体资源?X-Spider帮你轻松解决内容收集难题
如何一键下载推特上的所有媒体资源?X-Spider帮你轻松解决内容收集难题 【免费下载链接】x-spider A spider for X (Twitter) 项目地址: https://gitcode.com/gh_mirrors/xs/x-spider 你是否曾遇到过这种情况:在推特上看到了精美的图片、有趣的视频…...

从混乱到掌控:FastbootEnhance如何重塑安卓设备管理体验
从混乱到掌控:FastbootEnhance如何重塑安卓设备管理体验 【免费下载链接】FastbootEnhance A user-friendly Fastboot ToolBox & Payload Dumper for Windows 项目地址: https://gitcode.com/gh_mirrors/fa/FastbootEnhance 你是否曾面对黑底白字的Fastb…...

告别激活弹窗:KMS_VL_ALL_AIO智能激活工具完全指南
告别激活弹窗:KMS_VL_ALL_AIO智能激活工具完全指南 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 还在为Windows系统激活烦恼吗?每次开机都看到"需要激活"的提…...