飞利浦双串口51单片机485网关
主要功能将PC端的数据接收下来,分发到不同的设备,也是轮询设备数据读取回来,打包回传到PC端,数据包包头包尾识别,数据校验,接收超时处理,将协议结构化处理,协议的改动不需要改动程序,中断接收一帧完成置标志位交由上层协议程序校验并处理转发
协议格式定义,每一个位都进行了定仪
#ifndef PROTOCOL_H
#define PROTOCOL_H
#include "define.h"
//IO_EMM_31
typedef struct
{uchar Stx;uchar Length;uchar ID;uchar TollCollectorID[3];uchar LoginDuration[2];uchar VehicleClass;union{uchar byte;struct{uchar Payment:4;uchar Axle:4;}BIT;}AxlePaymentDisplay;union{uint word;uchar byte[2];}TollFare;union{uchar byte;struct{ uchar reserved:1;uchar Exit_LSS_Rlight:1;uchar BarrierClose:1;uchar BarrierOpen:1;uchar Entry_LSS_Rlight:1;uchar Entry_LSS_Glight:1;uchar LaneLog:1;uchar zero:1;}BIT;}TMU_Control1;union{uchar byte;struct{uchar EmergencyAlarm:1;uchar EvasionAlarm:1;uchar DiscrepancyAlarm:1;uchar MisregistrationAlarm:1;uchar reserved:1;uchar AxleDectorFault:1;uchar BoothEquipmentFault:1;uchar zero:1;}BIT;}TMU_Control2;union{uchar byte;struct{uchar EmergencyAlarmRstBut:1;uchar EvalsionAlarmRstBut:1;uchar DiscrepancyAlarmRstBut:1;uchar MisregistrationAlarmRstBut:1;uchar AxleDetectorOVerride:1;uchar KeyInOverrideSelect:1;uchar reserved:1;uchar zero:1;}BIT;}ConStatus1;union{uchar byte;struct{uchar resetved:4;uchar TMUCommFail:1;uchar TMUDimmerOverAct:1;uchar AllSignageDimmming:1;uchar zero:1;}BIT;}ConStatus2;union{uchar byte;struct{uchar reserved:1;uchar CanopyBeacon:1;uchar Entry_LSS_Rlight:1;uchar Entry_LSS_Glight:1;uchar TPS_Glight:1;uchar TPS_Rlight:1;uchar DimmingNormal:1;uchar zero:1;}BIT;}SignageControl;union{uchar byte;struct{uchar TPSCommFail:1;uchar reserve2:1;uchar reserve1:1;uchar TPSTempHigher70:1;uchar CLSCommFail:1;uchar CLSPixelFaultDetect:1;uchar CLSTempHigher70:1;uchar zero:1;}BIT;}TPS_CLSFaultStatus;union{uchar byte;struct{uchar EntryCommFail:1;uchar ExitCommFail:1;uchar RlightAspectHigher50:1;uchar RlightAspectHigher25:1;uchar TempHigher70:1;uchar reseved:1;uchar Rlight:1;uchar zero:1;}BIT;}ExitLSSStatus;union{uchar byte;struct{uchar GlightAspectHigher50:1;uchar GlightAspectHigher25:1;uchar RlightAspectHigher50:1;uchar RlightAspectHigher25:1;uchar TempHigher70:1;uchar Glight:1;uchar Rlight:1;uchar zero:1;}BIT;}EntryLSSStatus;union{uchar byte;struct{uchar ShortDetect:1;uchar reserved:2;uchar KickBarAlarm:1;uchar CabinetOpen:1;uchar BarrierColse:1;uchar BarrierOpen:1;uchar zero:1;}BIT;}LocalIOInputStatus;union{uchar byte;struct{uchar Class0:1;uchar Class1:1;uchar Class2:1;uchar Class3:1;uchar Class4:1;uchar Class5:1;uchar Class6:1;uchar zero:1;}BIT;}AutoTollInputStatus1;union{uchar byte;struct{uchar Class7:1;uchar Class8:1;uchar Class9:1;uchar ClassAdd1:1;uchar LaneOpen:1;uchar LaneClose:1;uchar reserved:1;uchar zero:1;}BIT;}AutoTollInputStatus2;union{uchar byte;struct{uchar Axle1:1;uchar Axle2:1;uchar Axle3:1;uchar Axle4:1;uchar Axle5:1;uchar Axle6:1;uchar reserved:1;uchar zero:1;}BIT;}AutoTollInputStatus3;uchar Checksum;uchar Etx;
}IO_EMM_31;//IO_EMM_32
typedef struct
{uchar Stx;uchar Length;uchar ID;union{uchar byte;struct{uchar reserved:1;uchar Dimmer:3;uchar Normal:3;uchar zero:1;}BIT;}TPSSetting;union{uchar byte;struct{uchar reserved:1;uchar Dimmer:3;uchar Normal:3;uchar zero:1;}BIT;}CLSSetting;union{uchar byte;struct{uchar reserved:1;uchar Dimmer:3;uchar Normal:3;uchar zero:1;}BIT;}EntryLSSSetting;union{uchar byte;struct{uchar reserved:1;uchar Dimmer:3;uchar Normal:3;uchar Zero:1;}BIT;}ExitLSSSetting;uchar Checksum;uchar Etx;
}IO_EMM_32;//IO_TMU
typedef struct
{uchar Stx;uchar Length;uchar ID;uchar TollCollectorID[3];uchar LoginDuration[2];uchar VehicleClass;union{uchar byte;struct{uchar Payment:4;uchar Axle:4;}BIT;}AxlePaymentDisplay;union{uchar byte;struct{ uchar reserved:1;uchar Exit_LSS_Rlight:1;uchar BarrierClose:1;uchar BarrierOpen:1;uchar Entry_LSS_Rlight:1;uchar Entry_LSS_Glight:1;uchar LaneLog:1;uchar zero:1;}BIT;}TMU_Control1;union{uchar byte;struct{uchar EmergencyAlarm:1;uchar EvasionAlarm:1;uchar DiscrepancyAlarm:1;uchar MisregistrationAlarm:1;uchar reserved:1;uchar AxleDectorFault:1;uchar BoothEquipmentFault:1;uchar zero:1;}BIT;}TMU_Control2;union{uchar byte;struct{uchar EmergencyAlarmRstBut:1;uchar EvalsionAlarmRstBut:1;uchar DiscrepancyAlarmRstBut:1;uchar MisregistrationAlarmRstBut:1;uchar AxleDetectorOVerride:1;uchar KeyInOverrideSelect:1;uchar reserved:1;uchar zero:1;}BIT;}ConStatus1;union{uchar byte;struct{uchar resetved:5;uchar TMUDimmerOverAct:1;uchar AllSignageDimming:1;uchar zero:1;}BIT;}ConStatus2;uchar Checksum;uchar Etx;
}IO_TMU;//IO_TPS
typedef struct
{uchar Stx;uchar Length;uchar ID;union{uint word;uchar byte[2];}TollFare;union{uchar byte;struct{uchar DispPleasePaid:1;uchar DispThankyou:1;uchar Rlight:1;uchar Glight:1;uchar BrightnessControl:3;uchar reserved:1;}BIT;}LedDisplay;union{uchar byte;struct{uchar TempHigher70:1;uchar reserved:7;}BIT;}Status;uchar Checksum;uchar Etx;
}IO_TPS;//IO_CLS
typedef struct
{uchar Stx;uchar Length;uchar ID;uchar VehicleClass;union{uchar byte;struct{uchar Axle:3;uchar reserved1:1;uchar RelayContactClose:1;uchar reserved2:3;}BIT;}AxleCounterDisplay;union{uchar byte;struct{uchar reserved:4;uchar Brightness:3;uchar zero:1;}BIT;}BrightnessControl;union{uchar byte;struct{uchar TempHigher70:1;uchar PixelFaultDetected:1;uchar reserved:6;}BIT;}Status;uchar Checksum;uchar Etx;
}IO_CLS;//IO_LSS
typedef struct
{uchar Stx;uchar Length;uchar ID;union{uchar byte;struct{uchar Rlight:1;uchar Glight:1;uchar reserved:6; }BIT;}SignalDisp;union{uchar byte;struct{uchar RlightAspectHigher25:1;uchar RlightAspectHigher50:1;uchar GlightAspectHigher25:1;uchar GlightAspectHigher50:1;uchar BrightnessControl:3;uchar reserved:1; }BIT;}Status1;union{uchar byte;struct{uchar TempHigher70:1;uchar reserved:7;}BIT;}Status2;uchar Checksum;uchar Etx;
}IO_LSS;typedef struct
{uchar Dimmer;uchar Normal;
}BRIGHTNESS;
#endif
中断接收与发送
void IntUart0Rx( void ) interrupt 4
{uchar temp;static uchar MsgLen;if( RI_0 ){RI_0 = 0;temp = S0BUF;Timer1ms[TIMER_COM_DEV].Tick = 10;Timer1ms[TIMER_COM_DEV].Flg.BIT.Enable = 1;Timer[TIMER_RESPONSE].Tick = 5;ACC = temp;if( P==RB8_0 ){if( !DevStrEndFlg ){if( temp==0xaa ){ DevStrEndFlg = 1;IO2Dev.RecvPtr = 0;IO2Dev.RecvBuf[IO2Dev.RecvPtr++] = temp;IO2Dev.Error.byte = 0;}}else{if( temp==0xab && IO2Dev.RecvPtr==MsgLen ){DevStrEndFlg = 0;IO2Dev.RecvBuf[IO2Dev.RecvPtr++] = temp;IO2Dev.Flg.BIT.Recv = 1;IO2Dev.RecvLen = IO2Dev.RecvPtr;}/*else if( temp==0xaa && IO2Dev.RecvPtr!=MsgLen-1 ){IO2Dev.RecvPtr = 0;IO2Dev.RecvBuf[IO2Dev.RecvPtr++] = temp;}*/else if( IO2Dev.RecvPtr==2 ){IO2Dev.ID = temp;IO2Dev.RecvBuf[IO2Dev.RecvPtr++] = temp;switch( IO2Dev.ID ){case IO_TMU_ID:MsgLen = sizeof( IO_TMU )-1;break;case IO_TPS_ID:MsgLen = sizeof( IO_TPS )-1;break;case IO_CLS_ID:MsgLen = sizeof( IO_CLS )-1;break;case IO_ELSS_ID:MsgLen = sizeof( IO_LSS )-1;break;case IO_XLSS_ID:MsgLen = sizeof( IO_LSS )-1;break;default:DevStrEndFlg = 0;}}else if( IO2Dev.RecvPtr<RECVBUF_LEN ){IO2Dev.RecvBuf[IO2Dev.RecvPtr++] = temp;}else //接收数据溢出{DevStrEndFlg = 0;IO2Dev.RecvPtr = 0;}
// flg = IO2Dev.RecvPtr;}}else{IO2Dev.Error.BIT.Even = 1;}}else if( S0STAT&0x08 )//Framing Error{S0STAT &= ~0x08;IO2Dev.Error.BIT.Framing = 1;}else if( S0STAT&0x04 )//Break Detect{S0STAT &= ~0x04;IO2Dev.Error.BIT.BreakDetect = 1;}else if( S0STAT&0x02 )//Overrun Error{S0STAT &= ~0x02;IO2Dev.Error.BIT.Overrun = 1;}
}//串行口0的发送中断程序
void IntUart0Tx( void ) interrupt 7
{Uart0SendData();
}
以指针提取数据
#include "Emm2IO.h"
#include "com.h"
#include "protocol.h"
#include "systemtask.h"
#include "IOCheck.h"IO_EMM_31 IOEmm31;
extern BUF_DEF Emm2IO;
extern IO_TMU IOTmu;
extern IO_TPS IOTps;
extern IO_CLS IOCls;
extern IO_LSS IOEntryLss;
extern IO_LSS IOExitLss;
extern BRIGHTNESS TpsBrightness,ClsBrightness,EntryLssBrightness,ExitLssBrightness;extern IO_CHECK_DEF IoCheck;
extern TIMER_DEF Timer[TIMER_NUM];
extern uchar flg;
void Emm2IOInit( void )
{//31IOEmm31.Stx = 0xaa;IOEmm31.Length = 0x18;IOEmm31.ID = 0x20;IOEmm31.ConStatus1.byte = 0;IOEmm31.ConStatus2.byte = 0x10;IOEmm31.TPS_CLSFaultStatus.byte = 0x11;IOEmm31.ExitLSSStatus.byte = 0x03;IOEmm31.EntryLSSStatus.byte = 0x00;IOEmm31.LocalIOInputStatus.byte = 0x00;IOEmm31.AutoTollInputStatus1.byte = 0x00;IOEmm31.AutoTollInputStatus2.byte = 0x00;IOEmm31.AutoTollInputStatus3.byte = 0x00;IOEmm31.Etx = 0xab;Emm2IO.Flg.byte = 0;Emm2IO.SendLen = 0;Emm2IO.RecvLen = 0;Emm2IO.SendPtr = 0;Emm2IO.RecvPtr = 0;Timer[TIMER_STOP].Flg.BIT.TimeOut = 0;Timer[TIMER_STOP].Tick = 500;Timer[TIMER_STOP].Flg.BIT.Enable = 1;
}
//从Emm2IOController31的接收数据中取出需要的内容放到设备缓冲区中
void CopyEmm31ToDev( IO_EMM_31 *IoEmm31Ptr )
{//TMUIOTmu.TollCollectorID[0] = IoEmm31Ptr->TollCollectorID[0];IOTmu.TollCollectorID[1] = IoEmm31Ptr->TollCollectorID[1];IOTmu.TollCollectorID[2] = IoEmm31Ptr->TollCollectorID[2];IOTmu.LoginDuration[0] = IoEmm31Ptr->LoginDuration[0];IOTmu.LoginDuration[1] = IoEmm31Ptr->LoginDuration[1];IOTmu.VehicleClass = IoEmm31Ptr->VehicleClass;IOTmu.AxlePaymentDisplay.byte = IoEmm31Ptr->AxlePaymentDisplay.byte;IOTmu.TMU_Control1.byte = IoEmm31Ptr->TMU_Control1.byte;IOTmu.TMU_Control2.byte = IoEmm31Ptr->TMU_Control2.byte;//TPSIOTps.TollFare.byte[0] = IoEmm31Ptr->TollFare.byte[0];IOTps.TollFare.byte[1] = IoEmm31Ptr->TollFare.byte[1];IOTps.LedDisplay.BIT.Glight = IoEmm31Ptr->SignageControl.BIT.TPS_Glight;IOTps.LedDisplay.BIT.Rlight = IoEmm31Ptr->SignageControl.BIT.TPS_Rlight;if( (((IoEmm31Ptr->TollFare.byte[0]&0xf0)>>4) == 0x000c) && (IoEmm31Ptr->AxlePaymentDisplay.BIT.Payment == 0x0b) ){IOTps.LedDisplay.BIT.DispPleasePaid = 1;IOTps.LedDisplay.BIT.DispThankyou = 0;}else if( (((IoEmm31Ptr->TollFare.byte[0]&0xf0)>>4) == 0x0000c) && (IoEmm31Ptr->AxlePaymentDisplay.BIT.Payment != 0x0b) ){IOTps.LedDisplay.BIT.DispPleasePaid = 0;IOTps.LedDisplay.BIT.DispThankyou = 1;}else if( ((IoEmm31Ptr->TollFare.byte[0]&0xf0)>>4) == 0x0000b ){IOTps.LedDisplay.BIT.DispPleasePaid = 0;IOTps.LedDisplay.BIT.DispThankyou = 0;}else{IOTps.LedDisplay.BIT.DispPleasePaid = 0;IOTps.LedDisplay.BIT.DispThankyou = 0;}//CLSIOCls.VehicleClass = IoEmm31Ptr->VehicleClass;if( IoEmm31Ptr->AxlePaymentDisplay.BIT.Axle>0 && IoEmm31Ptr->AxlePaymentDisplay.BIT.Axle<7 ){IOCls.AxleCounterDisplay.BIT.Axle = IoEmm31Ptr->AxlePaymentDisplay.BIT.Axle;}else{IOCls.AxleCounterDisplay.BIT.Axle = 0;}IOCls.AxleCounterDisplay.BIT.RelayContactClose = IoEmm31Ptr->SignageControl.BIT.CanopyBeacon;//EntryLSSIOEntryLss.SignalDisp.BIT.Rlight = IoEmm31Ptr->SignageControl.BIT.Entry_LSS_Rlight;if( IoEmm31Ptr->SignageControl.BIT.Entry_LSS_Glight && IOEmm31.LocalIOInputStatus.BIT.BarrierOpen &&!IOEmm31.LocalIOInputStatus.BIT.BarrierColse ){IOEntryLss.SignalDisp.BIT.Glight = 1;IOEntryLss.SignalDisp.BIT.Rlight = 0;}else{IOEntryLss.SignalDisp.BIT.Glight = 0;IOEntryLss.SignalDisp.BIT.Rlight = 1;}//ExitLSSif( IoEmm31Ptr->SignageControl.BIT.DimmingNormal ){IOTps.LedDisplay.BIT.BrightnessControl = TpsBrightness.Dimmer;IOCls.BrightnessControl.BIT.Brightness = ClsBrightness.Dimmer;IOEntryLss.Status1.BIT.BrightnessControl = EntryLssBrightness.Dimmer;IOExitLss.Status1.BIT.BrightnessControl = ExitLssBrightness.Dimmer;}else{IOTps.LedDisplay.BIT.BrightnessControl = TpsBrightness.Normal;IOCls.BrightnessControl.BIT.Brightness = ClsBrightness.Normal;IOEntryLss.Status1.BIT.BrightnessControl = EntryLssBrightness.Normal;IOExitLss.Status1.BIT.BrightnessControl = ExitLssBrightness.Normal;}
}
//从接收的Emm2IOController31的数据更新Emm31缓冲区
void CopyEmm31ToEmm31Buf( IO_EMM_31 *IoEmm31Ptr )
{uchar *Sptr,*Dptr,i;Sptr = (uchar*)IoEmm31Ptr;Dptr = (uchar*)&IOEmm31;for( i=0; i<11; i++ ){*(Dptr+i+3) = *(Sptr+i+3);}*(Dptr+16) = *(Sptr+16);
}
//更新各设备的亮度值
void CopyEmm32ToDev( IO_EMM_32 *IoEmm32Ptr )
{//TPSTpsBrightness.Dimmer = IoEmm32Ptr->TPSSetting.BIT.Dimmer;TpsBrightness.Normal = IoEmm32Ptr->TPSSetting.BIT.Normal;//CLSClsBrightness.Dimmer = IoEmm32Ptr->CLSSetting.BIT.Dimmer;ClsBrightness.Normal = IoEmm32Ptr->CLSSetting.BIT.Normal;//EntryLSSEntryLssBrightness.Dimmer = IoEmm32Ptr->EntryLSSSetting.BIT.Dimmer;EntryLssBrightness.Normal = IoEmm32Ptr->EntryLSSSetting.BIT.Normal;//ExitLSSExitLssBrightness.Dimmer = IoEmm32Ptr->ExitLSSSetting.BIT.Dimmer;ExitLssBrightness.Normal = IoEmm32Ptr->ExitLSSSetting.BIT.Normal;
}
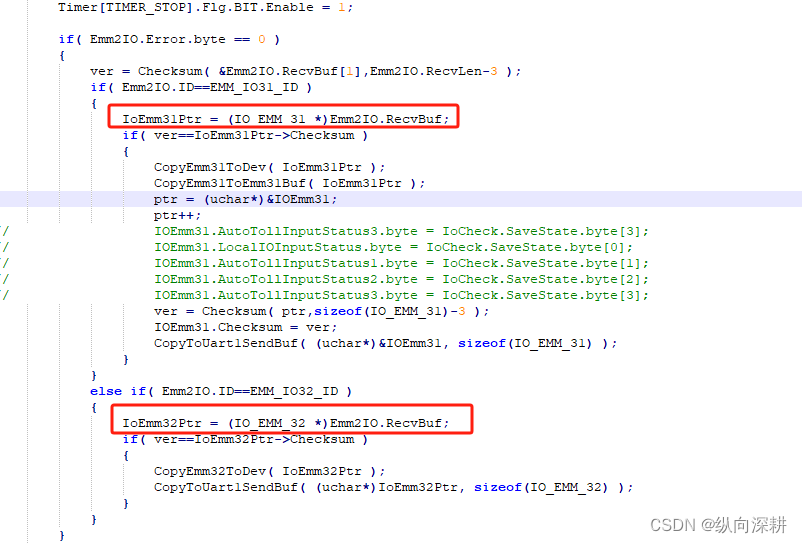
//判断是否已从EMM接收完整的数据包,并进行处理
void Emm2IOMain( void )
{uchar ver,*ptr;IO_EMM_31 *IoEmm31Ptr;IO_EMM_32 *IoEmm32Ptr;if( Emm2IO.Flg.BIT.Recv ){Emm2IO.Flg.BIT.Recv = 0;Timer[TIMER_STOP].Tick = 500;Timer[TIMER_STOP].Flg.BIT.Enable = 1;if( Emm2IO.Error.byte == 0 ){ver = Checksum( &Emm2IO.RecvBuf[1],Emm2IO.RecvLen-3 );if( Emm2IO.ID==EMM_IO31_ID ){IoEmm31Ptr = (IO_EMM_31 *)Emm2IO.RecvBuf;if( ver==IoEmm31Ptr->Checksum ){CopyEmm31ToDev( IoEmm31Ptr );CopyEmm31ToEmm31Buf( IoEmm31Ptr );ptr = (uchar*)&IOEmm31;ptr++;
// IOEmm31.AutoTollInputStatus3.byte = IoCheck.SaveState.byte[3];
// IOEmm31.LocalIOInputStatus.byte = IoCheck.SaveState.byte[0];
// IOEmm31.AutoTollInputStatus1.byte = IoCheck.SaveState.byte[1];
// IOEmm31.AutoTollInputStatus2.byte = IoCheck.SaveState.byte[2];
// IOEmm31.AutoTollInputStatus3.byte = IoCheck.SaveState.byte[3];ver = Checksum( ptr,sizeof(IO_EMM_31)-3 );IOEmm31.Checksum = ver;CopyToUart1SendBuf( (uchar*)&IOEmm31, sizeof(IO_EMM_31) );}}else if( Emm2IO.ID==EMM_IO32_ID ){IoEmm32Ptr = (IO_EMM_32 *)Emm2IO.RecvBuf;if( ver==IoEmm32Ptr->Checksum ){CopyEmm32ToDev( IoEmm32Ptr );CopyToUart1SendBuf( (uchar*)IoEmm32Ptr, sizeof(IO_EMM_32) );}}}else{Emm2IO.Error.byte = 0;}Emm2IO.RecvPtr = 0;Emm2IO.ID = 0;}//When no polling with EMM > 5 seconds.if( Timer[TIMER_STOP].Flg.BIT.TimeOut ){Timer[TIMER_STOP].Flg.BIT.TimeOut = 0;//TMUIOTmu.TollCollectorID[0] = 0x0b;IOTmu.TollCollectorID[1] = 0xbb;IOTmu.TollCollectorID[2] = 0xbb;IOTmu.LoginDuration[0] = 0xbb;IOTmu.LoginDuration[1] = 0xbb;IOTmu.VehicleClass = 0xbb;IOTmu.AxlePaymentDisplay.byte = 0xbb;IOTmu.TMU_Control1.byte = 0x00;IOTmu.TMU_Control2.byte = 0x40;//TPSIOTps.TollFare.word = 0xbbbb;IOTps.LedDisplay.BIT.Rlight = 1;IOTps.LedDisplay.BIT.Glight = 0;IOTps.LedDisplay.BIT.DispPleasePaid = 0;IOTps.LedDisplay.BIT.DispThankyou = 0;//CLSIOCls.VehicleClass = 0xbb;IOCls.AxleCounterDisplay.byte = 0x00;//Entry LssIOEntryLss.SignalDisp.byte = 0x01;//Exit LssIOExitLss.SignalDisp.byte = 0x01;}
}
主程序循环,
代码多年前写,基于飞利浦双串口51单片机,程序结构是大循环前后台标志,就算现在用上了linux、rtos等的方式,程序接收处理方式差别不大,只是实现起来更简单
下面是完整工程连接
链接:https://pan.baidu.com/s/1bXOrMRH6Gf7kcjra4uANtA?pwd=1234
提取码:1234
相关文章:
飞利浦双串口51单片机485网关
主要功能将PC端的数据接收下来,分发到不同的设备,也是轮询设备数据读取回来,打包回传到PC端,数据包包头包尾识别,数据校验,接收超时处理,将协议结构化处理,协议的改动不需要改动程序…...
生态扩展:Flink Doris Connector
生态扩展:Flink Doris Connector 官网地址: https://doris.apache.org/zh-CN/docs/dev/ecosystem/flink-doris-connector flink的安装: tar -zxvf flink-1.16.0-bin-scala_2.12.tgz mv flink-1.16.0-bin-scala_2.12.tgz /opt/flinkflink环境…...

HarmonyOS(二)—— 初识ArkTS开发语言(上)之TypeScript入门
前言 Mozilla创造了JS,Microsoft创建了TS,而Huawei进一步推出了ArkTS。因此在学习使用ArkTS前,需要掌握基本的TS开发技能。 ArkTS介绍 ArkTS是HarmonyOS优选的主力应用开发语言。它在TypeScript(简称TS)的基础上&am…...
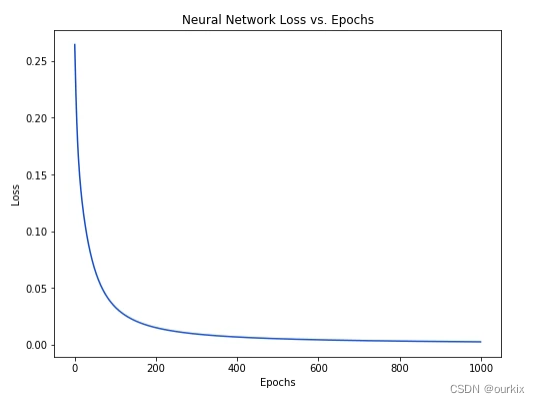
从零开始实现神经网络(一)_NN神经网络
参考文章:神经网络介绍 一、神经元 这一神经网络的基本单元,神经元接受输入,对它们进行一些数学运算,并产生一个输出。 这里有三步。 首先,将每个输入(X1)乘以一个权重: 接下来&…...

C语言 每日一题 Day10
1.使用函数判断完全平方数 本题要求实现一个判断整数是否为完全平方数的简单函数。 函数接口定义: int IsSquare(int n); 其中n是用户传入的参数,在长整型范围内。如果n是完全平方数,则函数IsSquare必须返回1,否则返回0。 代码实…...
C++继承——矩形和长方体
Rectangle矩形类 /*矩形类*/ class Rectangle { private:double L 0;double W 0; public:Rectangle() default;Rectangle(double a, double b);double GetArea(); /*矩形面积*/double GetGirth(); /*矩形周长*/ }; /*构造函数*/ Rectangle::Rectangle(double a, double b) …...
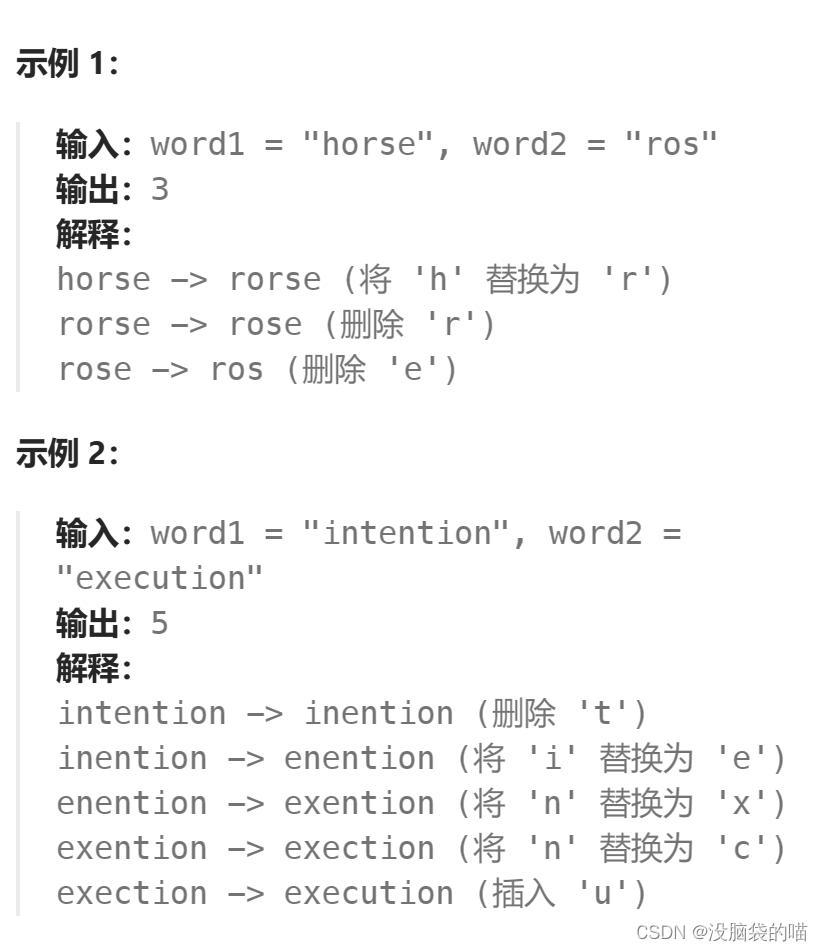
代码随想录打卡第五十八天|● 583. 两个字符串的删除操作 ● 72. 编辑距离
583. 两个字符串的删除操作 题目: 给定两个单词 word1 和 word2 ,返回使得 word1 和 word2 相同所需的最小步数。 每步 可以删除任意一个字符串中的一个字符。 题目链接: 583. 两个字符串的删除操作 解题思路: dp数组的含义&am…...

面试流程之——程序员如何写项目经验
在简历中介绍IT项目经验,你可以遵循以下步骤: 明确项目目标:首先,清晰地阐述项目的目标。这可以是提升某个软件的性能,改进某个系统的用户界面,或者增加某款产品的功能。让读者了解你的工作与项目的整体目…...
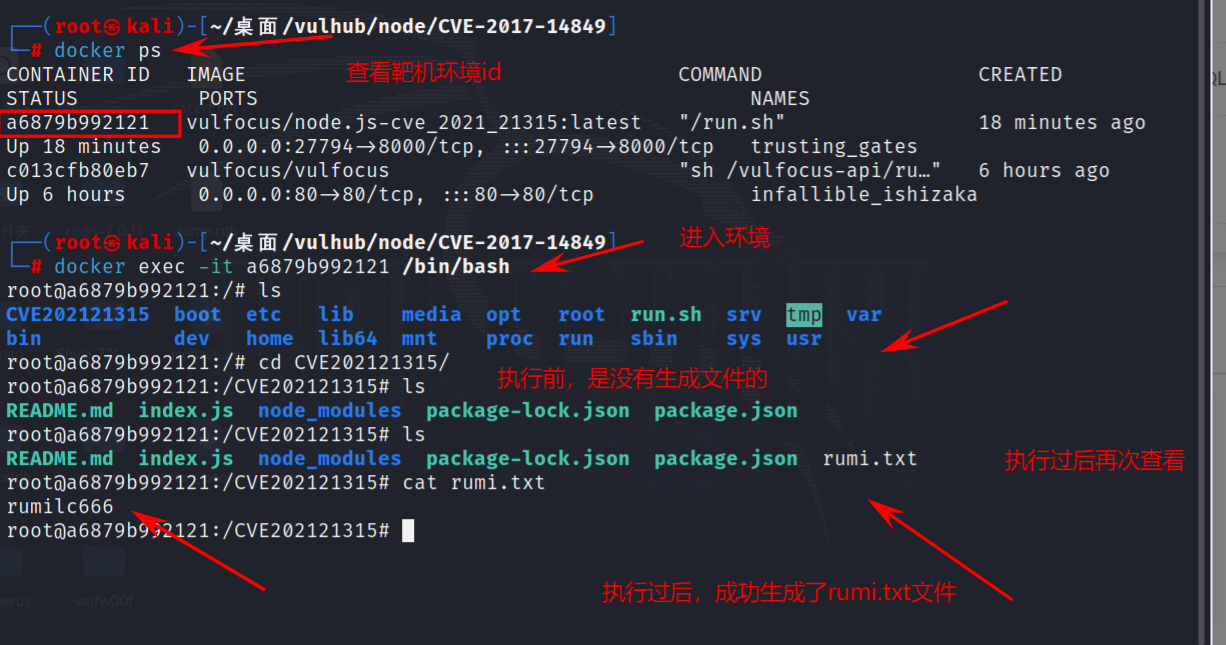
框架安全-CVE 漏洞复现DjangoFlaskNode.jsJQuery框架漏洞复现
目录 服务攻防-框架安全&CVE复现&Django&Flask&Node.JS&JQuery漏洞复现中间件列表介绍常见语言开发框架Python开发框架安全-Django&Flask漏洞复现Django开发框架漏洞复现CVE-2019-14234(Django JSONField/HStoreField SQL注入漏洞ÿ…...

基于SSM的理发店管理系统
基于SSM的理发店管理系统的设计与实现~ 开发语言:Java数据库:MySQL技术:SpringSpringMVCMyBatis工具:IDEA/Ecilpse、Navicat、Maven 系统展示 主页 公告信息 管理员界面 用户界面 摘要 基于SSM(Spring、Spring MVC、…...
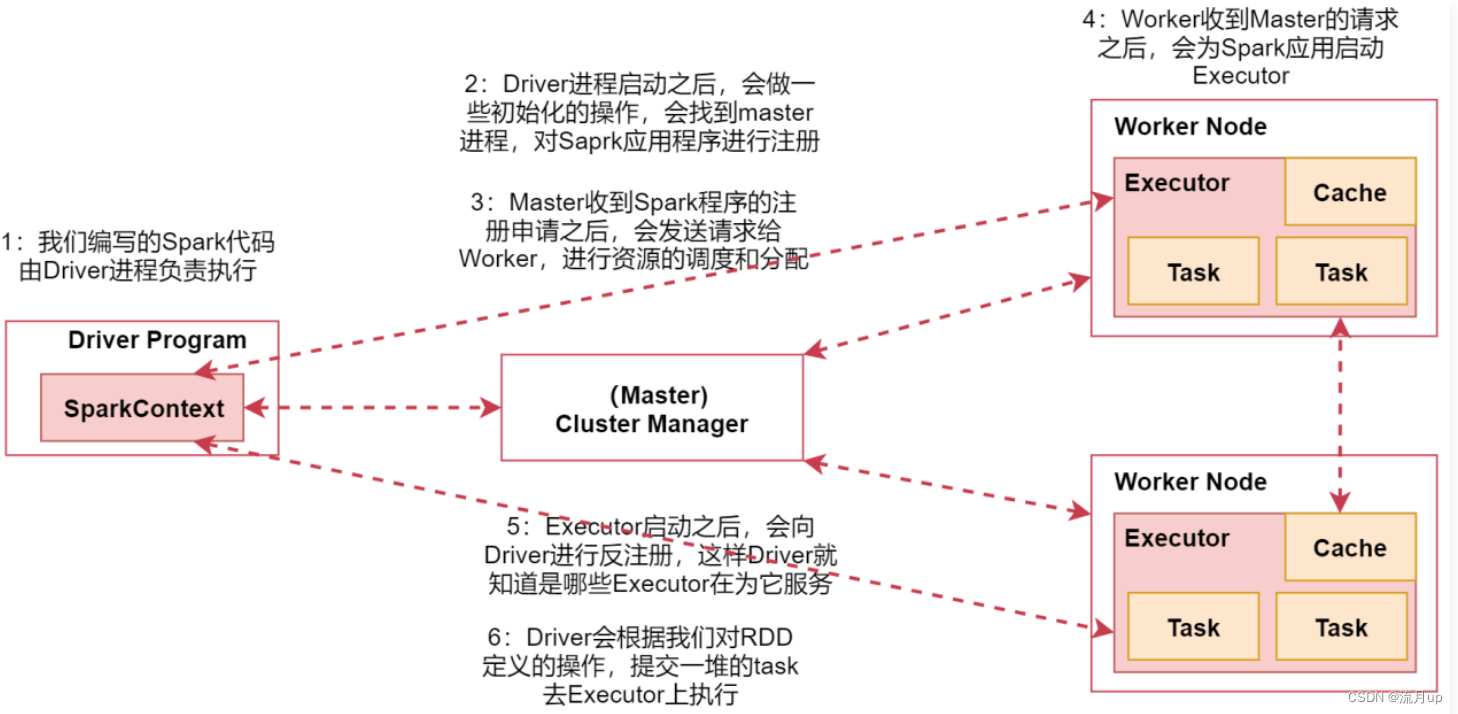
2.Spark的工作与架构原理
概述 目标: spark的工作原理spark数据处理通用流程rdd 什么是rddrdd 的特点 spark架构 spark架构相关进程spark架构原理 spark的工作原理 spark 的工作原理,如下图 图中中间部分是spark集群,也可以是基于 yarn 的,图上可以…...
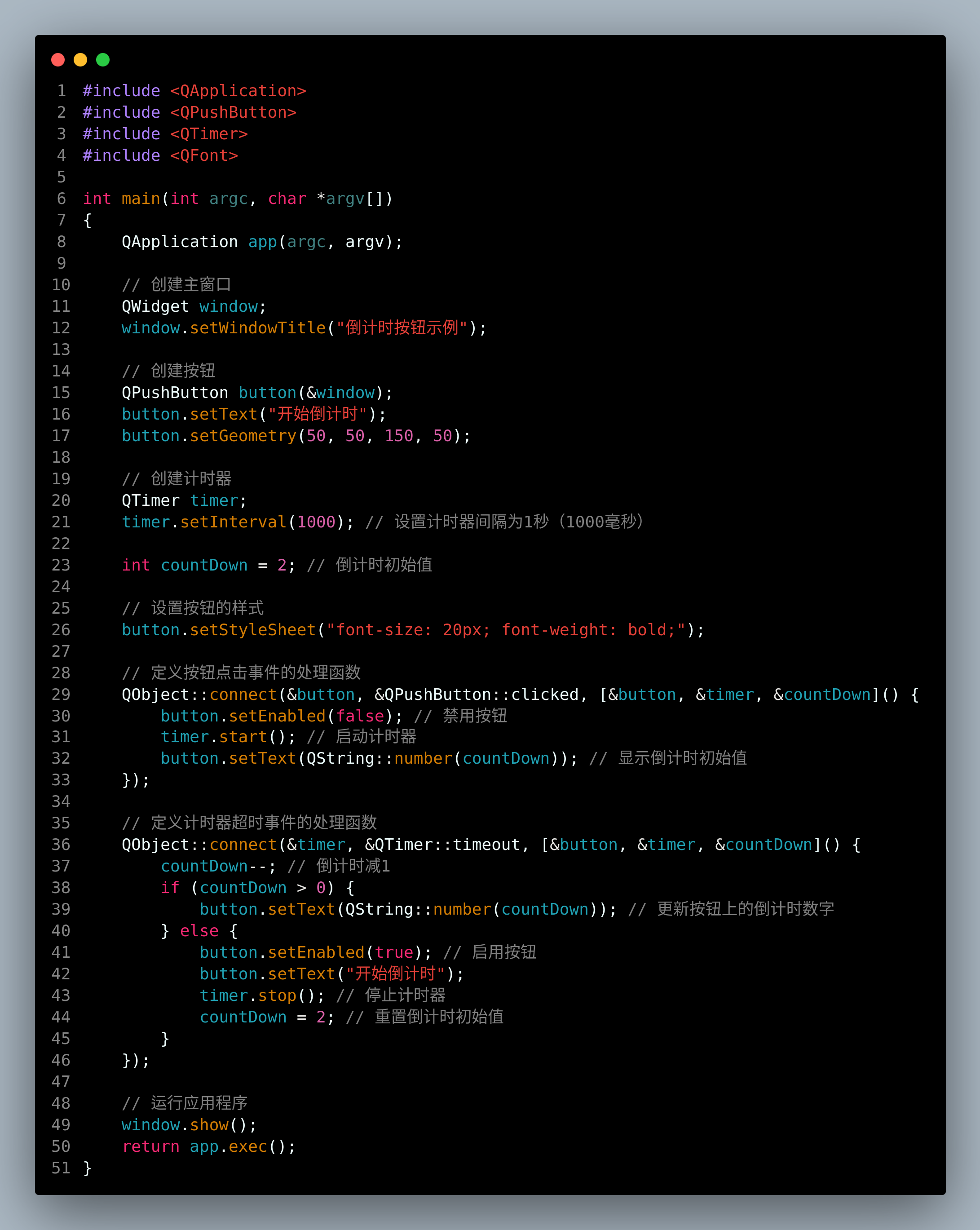
qt-C++笔记之带有倒计数显示的按钮,计时期间按钮锁定
qt-C笔记之带有倒计数显示的按钮,计时期间按钮锁定 code review! 文章目录 qt-C笔记之带有倒计数显示的按钮,计时期间按钮锁定1.运行2.main.cc3.main.pro 1.运行 2.main.cc 代码 #include <QApplication> #include <QPushButton> #includ…...
有哪些?)
HTML全局属性(global attribute)有哪些?
HTML全局属性是指在HTML元素上可用的基本属性,它们适用于所有HTML元素。以下是一些常见的HTML全局属性: 1:class:为元素指定一个或多个类名,用于与CSS样式表关联。 2:id::为元素指定唯一的标识…...

MyBatis-Plus返回getOne返回null疑惑
getOne返回null 问题描述分析过程总结 问题描述 在数据库建了一张表主要包括两个字段master_id和slave_id;主要的额外字段max_lots 默认值是null; 当调用getOne进行查询结果是null,但实际情况是数据库时应该返回值的; AotfxMasterSlave ex…...
Physics2DPlugin3加载后会跳转gsap官网解决
因工作需要使用Physics2DPlugin3库,目标效果 加载他里面的在线js,使用效果正常,但是几秒会跳转官网,我们app内部、浏览器都会这样。 于是研究js代码,发现里面有setTimeout跳转。 删掉就好了 分享我改好的文件&#x…...
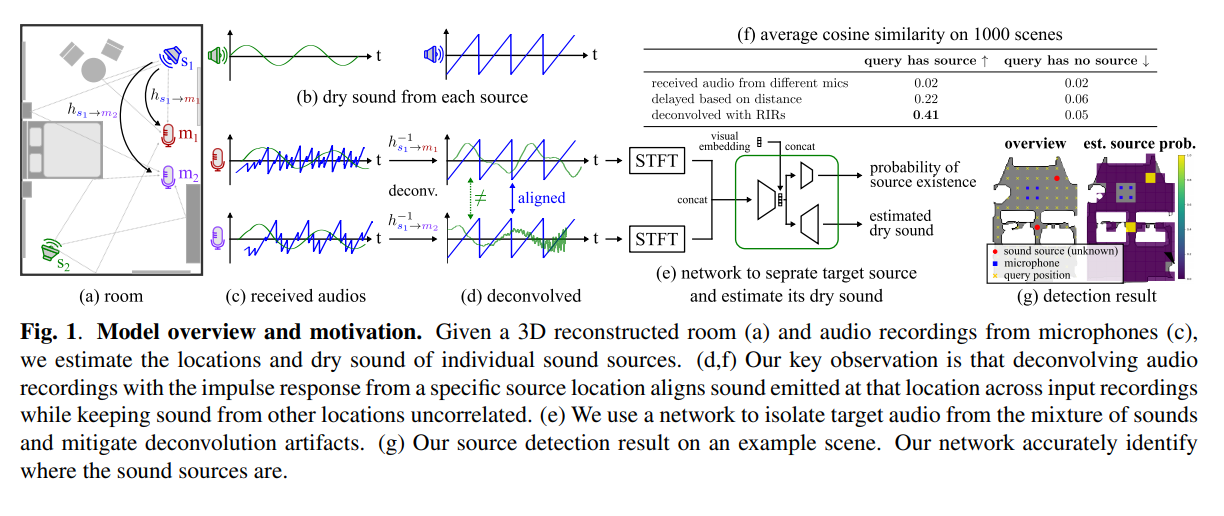
【AI视野·今日Sound 声学论文速览 第三十二期】Tue, 24 Oct 2023
AI视野今日CS.Sound 声学论文速览 Tue, 24 Oct 2023 Totally 20 papers 👉上期速览✈更多精彩请移步主页 Interesting: 📚nvas3d, 基于任意录音和室内3D信息合成重建不同听角(位置)处的新的声音。(from apple cmu) website: htt…...

在Linux上编译gdal3.1.2指南
作者:朱金灿 来源:clever101的专栏 为什么大多数人学不会人工智能编程?>>> 以Ubuntu 18编译gdal3.1.2为例,编译gdal3.1.2需要先编译proj库和geos库(可选)。我选择的proj库版本为proj-7.1.0,编译proj-7.1.0需要先编译tiff库和sqlite3。我选择的sqlite3的版本为…...

73. 矩阵置零 --力扣 --JAVA
题目 给定一个 m x n 的矩阵,如果一个元素为 0 ,则将其所在行和列的所有元素都设为 0 。请使用 原地 算法。 解题思路 通过二层循环找出元素为0所在的行和列;设置标志位记录当前行是否存在元素为0的,设置列表存储列为0的列&#…...
Kotlin——Android封装ViewBinding之二 优化)
(笔记)Kotlin——Android封装ViewBinding之二 优化
0. 在app模块的build.gradle文件中添加如下配置开启ViewBinding android {.......viewBinding {enabled true}} 1. 新建一个Ext.kt文件 添加两个扩展函数,分别对应Activity和Fragment inline fun <T : ViewBinding> AppCompatActivity.viewBinding(cross…...
(八))
MATLAB算法实战应用案例精讲-【图像处理】机器视觉(基础篇)(八)
目录 前言 几个高频面试题目 机器视觉如何获取到好图像 常见的视觉光源 各种视觉打光方式...

从‘栅栏’看频谱:一个音频信号处理的例子,讲透FFT分辨率与泄漏的权衡
从‘栅栏’看频谱:一个音频信号处理的例子,讲透FFT分辨率与泄漏的权衡想象你正在调试一段钢琴录音,其中有两个非常接近的音符——比如C4(261.63Hz)和C#4(277.18Hz)。在频谱分析仪上,…...

前端可访问性:键盘导航的无障碍设计实践
前端可访问性:键盘导航的无障碍设计实践 前言 各位前端小伙伴,今天咱们来聊聊键盘导航的无障碍问题。想象一下: 你设计了一个漂亮的网站,所有交互都需要鼠标视力正常的用户觉得"交互流畅"但键盘用户完全无法使用视障用户…...

2026最新免费图片去水印工具详细教程丨手把手教会你,一看就会
你是不是也遇到过这样的抓狂时刻:相册里翻到一张超好看的壁纸,刚想设成桌面,角落那个大大的水印瞬间让人没了心情;做课件做汇报,急需一张干净的产品图,翻遍全网不是带标的就是要付费;刷视频看到…...

英文会议翻译 app
一个针对开会读取大家说话的内容,过滤掉中文,只对英文的录音进行翻译,翻译的内容实时显示在屏幕上,除非点击停止,否则一直这样动态听并翻译成中文 显示在屏幕上的app,并直接安装在我手机上,并写一篇公众文章…...

uniAPP 所有章节知识体系概述和网站播放器落地一体方案
uniAPP 前十章知识体系 由于 uni-app 并没有官方统一的"前十章"教程划分,不同教材的章节结构有所不同。以下基于多本主流教材内容,整合出一套通用的 uni-app 学习路线,涵盖从入门基础到后端通信的核心知识。 第1章 初识 uni-app 本章是学习的起点,帮助建立对 …...

5大AI音频处理插件:用OpenVINO为Audacity注入本地智能处理能力
5大AI音频处理插件:用OpenVINO为Audacity注入本地智能处理能力 【免费下载链接】openvino-plugins-ai-audacity A set of AI-enabled effects, generators, and analyzers for Audacity. 项目地址: https://gitcode.com/gh_mirrors/op/openvino-plugins-ai-audaci…...

【肾结石检测】基于matlab图像处理技术检测超声图像中的肾结石【含Matlab源码 15553期】含报告
💥💥💥💥💥💥💞💞💞💞💞💞💞💞欢迎来到海神之光博客之家💞💞💞Ὁ…...

通过curl命令快速测试Taotoken不同模型的响应速度与效果
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过curl命令快速测试Taotoken不同模型的响应速度与效果 对于习惯使用命令行工具的技术人员来说,curl是一个直接且高效…...

高斯过程回归与离散变分原理:数据驱动的物理结构发现
1. 项目概述:当高斯过程回归遇见离散变分原理在物理信息机器学习这个交叉领域,我们常常面临一个核心挑战:如何从有限的、可能带有噪声的观测数据中,不仅还原出物理系统的动态,还能揭示其背后深刻的数学结构?…...

从0到99.3%上下文保真度:一位阿里云M6架构师复盘DeepSeek生产环境12类对话断裂根因与自动修复脚本
更多请点击: https://intelliparadigm.com 第一章:DeepSeek多轮对话优化的演进脉络与核心挑战 DeepSeek系列模型在多轮对话场景中的持续迭代,本质上是围绕上下文建模能力、状态一致性维持与推理效率三者协同演进的过程。早期版本依赖静态窗…...