STM32单片机智能小车一PWM方式实现小车调速和转向
目录
1. 电机模块开发
2. 让小车动起来
3. 串口控制小车方向
4. 如何进行小车PWM调速
5. PWM方式实现小车转向
1. 电机模块开发
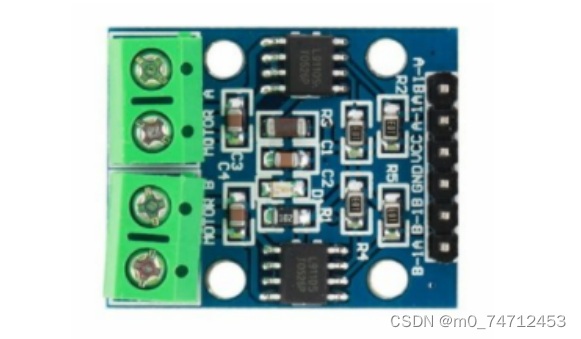
L9110s概述
接通VCC,GND 模块电源指示灯亮, 以下资料来源官方,具体根据实际调试
IA1输入高电平,IA1输入低电平,【OA1 OB1】电机正转;
IA1输入低电平,IA1输入高电平,【OA1 OB1】电机反转;
IA2输入高电平,IA2输入低电平,【OA2 OB2】电机正转;
IA2输入低电平,IA2输入高电平,【OA2 OB2】电机反转;
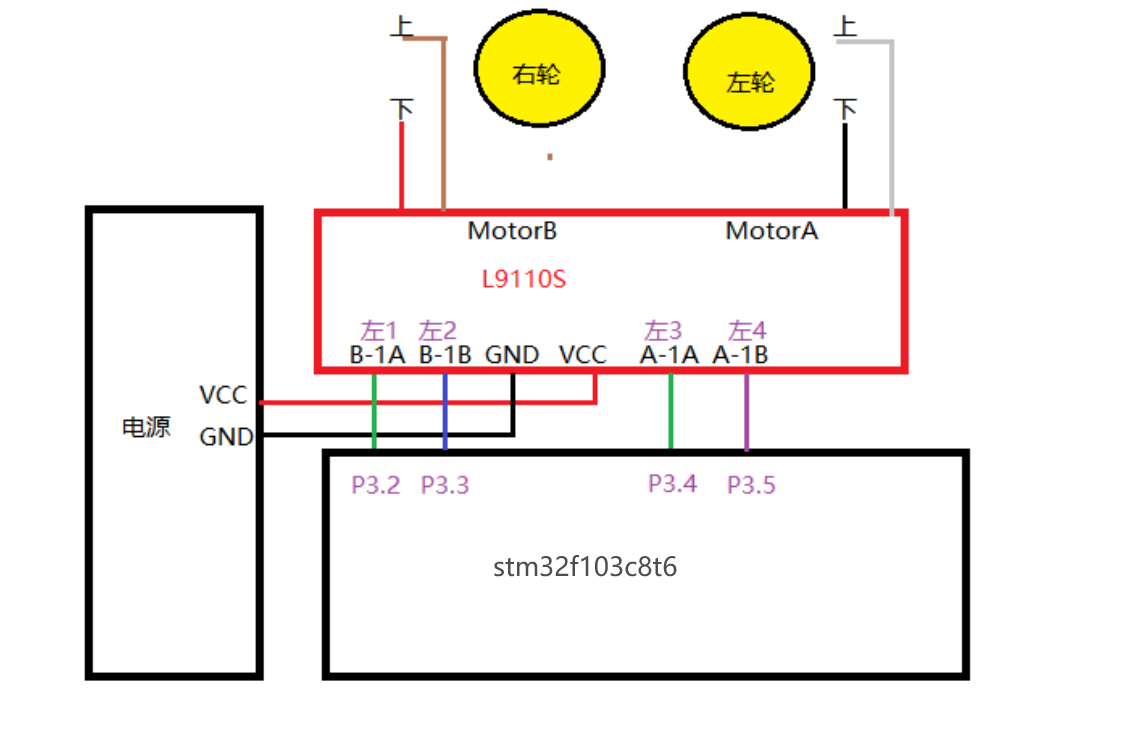
接线参考:
B-1A -- PA0
B-1B -- PB1
A-1A -- PA1
A-1B -- PB10
2. 让小车动起来
代码实现:
motor.c
#include "motor.h"
void goForward(void)
{// 左轮HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_10, GPIO_PIN_RESET);// 右轮HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
}
void goBack(void)
{// 左轮HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_10, GPIO_PIN_SET);// 右轮HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_SET);
}
void goLeft(void)
{// 左轮HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_10, GPIO_PIN_RESET);// 右轮HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
}
void goRight(void)
{// 左轮HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_10, GPIO_PIN_RESET);// 右轮HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
}
void stop(void)
{// 左轮HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_10, GPIO_PIN_SET);// 右轮HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
}motor.h
#ifndef __MOTOR_H__
#define __MOTOR_H__
#include "main.h"
void goForward(void);
void goBack(void);
void goLeft(void);
void goRight(void);
void stop(void);
#endifmain.c
#include "motor.h"//main函数的while循环部分:
while (1)
{goForward();HAL_Delay(1000);goBack();HAL_Delay(1000);goLeft();HAL_Delay(1000);goRight();HAL_Delay(1000);stop();HAL_Delay(1000);
}
3. 串口控制小车方向
- 串口分文件编程进行代码整合——通过现象来改代码
- 接入蓝牙模块,通过蓝牙控制小车
- 添加点动控制,如果APP支持按下一直发数据,松开就停止发数据(蓝牙调试助手的自定义按键不 能实现),就能实现前进按键按下后小车一直往前走的功能
代码实现:
usart.c
#include "usart.h"#include "string.h"
#include "stdio.h"
#include "motor.h"//串口接收缓存(1字节)
uint8_t buf=0;//定义最大接收字节数 200,可根据需求调整
#define UART1_REC_LEN 200// 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节
uint8_t UART1_RX_Buffer[UART1_REC_LEN];// 接收状态
// bit15, 接收完成标志
// bit14, 接收到0x0d
// bit13~0, 接收到的有效字节数目
uint16_t UART1_RX_STA=0;#define SIZE 12char buffer[SIZE];// 接收完成回调函数,收到一个数据后,在这里处理
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{// 判断中断是由哪个串口触发的if(huart->Instance == USART1){// 判断接收是否完成(UART1_RX_STA bit15 位是否为1)if((UART1_RX_STA & 0x8000) == 0){// 如果已经收到了 0x0d (回车),if(UART1_RX_STA & 0x4000){// 则接着判断是否收到 0x0a (换行)if(buf == 0x0a){// 如果 0x0a 和 0x0d 都收到,则将 bit15 位置为1UART1_RX_STA |= 0x8000;// 灯控指令if(!strcmp(UART1_RX_Buffer, "M1"))goForward();else if(!strcmp(UART1_RX_Buffer, "M2"))goBack();else if(!strcmp(UART1_RX_Buffer, "M3"))goLeft();else if(!strcmp(UART1_RX_Buffer, "M4"))goRight();elsestop();memset(UART1_RX_Buffer, 0, UART1_REC_LEN);UART1_RX_STA = 0;}else// 否则认为接收错误,重新开始UART1_RX_STA = 0;}else // 如果没有收到了 0x0d (回车){//则先判断收到的这个字符是否是 0x0d (回车)if(buf == 0x0d){// 是的话则将 bit14 位置为1UART1_RX_STA |= 0x4000;}else{// 否则将接收到的数据保存在缓存数组里UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf;UART1_RX_STA++;// 如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收if(UART1_RX_STA > UART1_REC_LEN - 1)UART1_RX_STA = 0;}}}// 重新开启中断HAL_UART_Receive_IT(&huart1, &buf, 1);}
}int fputc(int ch, FILE *f)
{ unsigned char temp[1]={ch};HAL_UART_Transmit(&huart1,temp,1,0xffff); return ch;
}4. 如何进行小车PWM调速
原理:
全速前进是LeftCon1A = 0; LeftCon1B = 1;
完全停止是LeftCon1A = 0;LeftCon1B = 0;
那么单位时间内,比如20ms, 有15ms是全速前进,5ms是完全停止, 速度就会比5ms全速前进,15ms完全停止获得的功率多,相应的速度更快!
开发:借用PWM的舵机控制代码
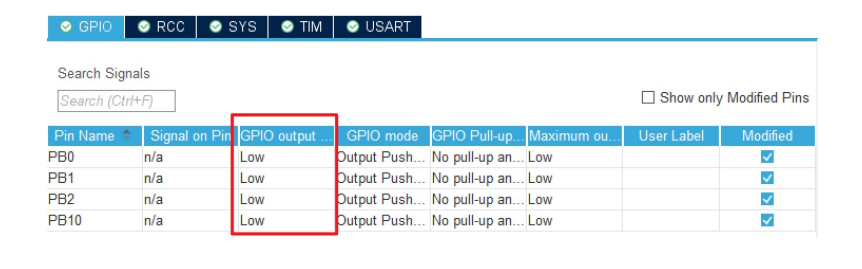
将控制车轮的4个 GPIO 口配置修改如下,否则小车动不起来。
原因:L9110每个控制口需要一高一低才可以动起来,如果PWM有效电平为高电平,则另一个 GPIO口则需要输出低电平才可以驱动轮子。
代码实现:
main.c
// main函数里
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);
while (1)
{__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1, 8);__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2, 8);HAL_Delay(1000);__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1, 10);__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2, 10);HAL_Delay(1000);__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1, 15);__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2, 15);HAL_Delay(1000);
}5. PWM方式实现小车转向
右转原理:
左轮速度大于右轮
左转原理:
右轮速度大于左轮
左右轮各自调速代码实现:
// main函数里
while (1)
{__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,8);__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,15);HAL_Delay(1000);__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,15);__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,8);HAL_Delay(1000);
}相关文章:
STM32单片机智能小车一PWM方式实现小车调速和转向
目录 1. 电机模块开发 2. 让小车动起来 3. 串口控制小车方向 4. 如何进行小车PWM调速 5. PWM方式实现小车转向 1. 电机模块开发 L9110s概述 接通VCC,GND 模块电源指示灯亮, 以下资料来源官方,具体根据实际调试 IA1输入高电平ÿ…...
灰狼优化算法(GWO)python
目录 一、灰狼优化算法的python实现 二、灰狼优化算法与遗传算法的对比分析(python) 2.1 GWO1.py 2.2 GA1.py 2.3 GWO_vs_GA.py 2.4 运行结果 三、基于莱维飞行改进的灰狼优化算法的python实现 一、灰狼优化算法的python实现 import numpy as …...
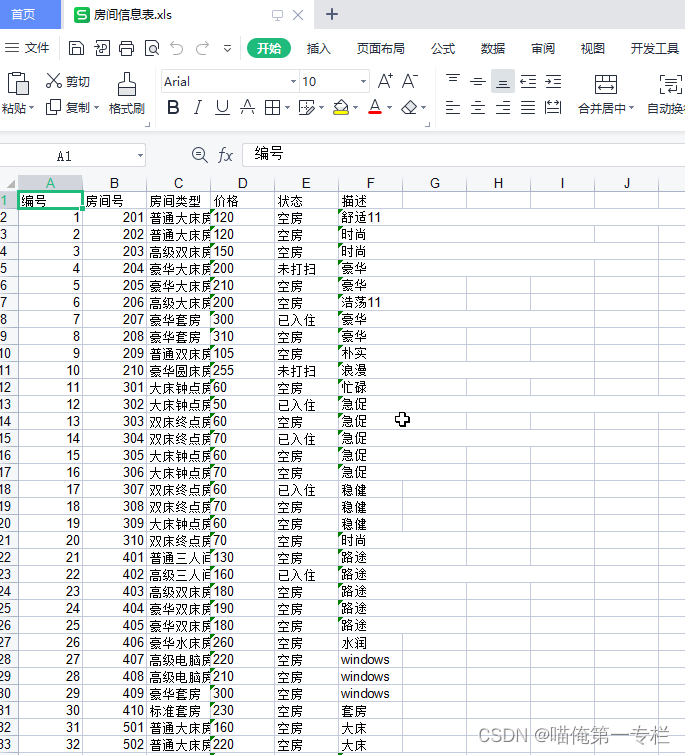
项目知识点总结-住房图片信息添加-Excel导出
(1)住房信息添加 Controller: RequestMapping("/add")public String add(Home home, Model model) throws IOException{String sqlPath null;//定义文件保存的本地路径String localPath"D:\\AnZhuang\\Java项目\\选题\\Xin-…...

第三届iEnglish全国ETP大赛决赛即将启动
如今,寓教于乐的学习方式越来越受到家长和孩子的欢迎,“玩中学”成为一种既能培养兴趣又有助于孩子成长的学习趋势。 以“玩转英语,用iEnglish”为活动主题的第三届全国ETP大赛即将于本周五(11月3日)迎来总决赛的抽签仪式。据主办方iEnglish智能英语学习解决方案相关负责人称,…...
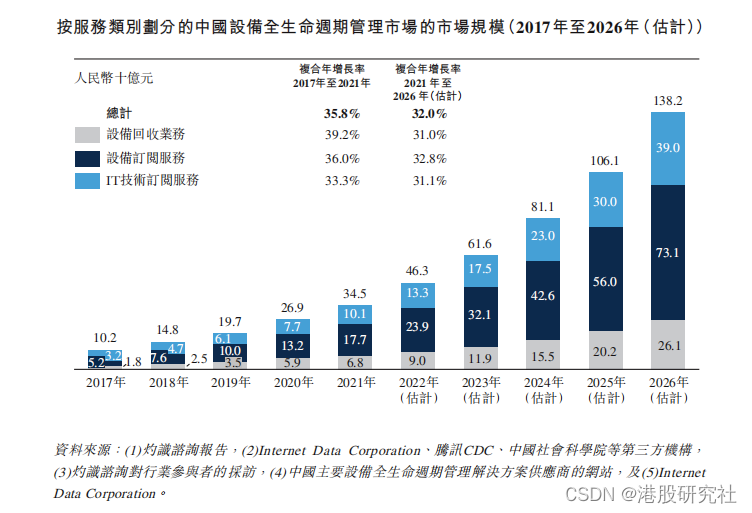
创造产业链协同优势后,凌雄科技在DaaS行业转动成长飞轮
企业服务领域,一直存在一种共识:做好很难,但一旦服务模式跑通了,得到了市场的认可,要滚起雪球就会事半功倍。 重资产、重运营的DaaS(设备及服务)赛道,是个非常典型的细分领域。在这…...

【protobuf】protobuf自定义数据格式,CMake编译C++文件读写自定义数据
protobuf自定义数据格式,CMake编译文件读写自定义数据 1.protobuf安装2.定义.proto文件3.编写main.cpp4.编写CMAkeLists配置文件5.运行 1.protobuf安装 protobuf库链接 2.定义.proto文件 新建一个Person.proto文件和一个Animal.proto文件,内容如下&…...

解决:http://localhost:8080 不在以下 request 合法域名列表中
在搭建资源服务器时,遇到了微信开发者工具中无法访问本地资源服务器的情况,报错如下: 参考一篇博文的方法,完美解决 【解决】http://localhost:8080 不在以下 request 合法域名列表中_localhost不在以下 request 合法域名列表中-…...

Linux普通用户提权(sudo)
文章目录 Linux普通用户提权(sudo)1、在sudoers文件添加普通用户2、测试 Linux普通用户提权(sudo) 1、在sudoers文件添加普通用户 正常来说,普通用户初始是不具备提权的能力的,比如执行sudo ls会出现报警告…...
链表指定节点的插入
向现有链表中插入结点,根据插入位置的不同,可分为以下 3 种情况: 插入到链表的头部,作为新的链表中第一个存有数据的结点(又称为”首元结点”);插入到链表中某两个结点之间的位置;插…...

解决问题Conda:CondaValueError: Malformed version string ‘~’ : invalid character(s)
解决问题Conda:CondaValueError: Malformed version string ‘~’ : invalid character(s) 背景 今天使用Conda构建项目运行环境的时候报错::CondaValueError: Malformed version string ‘~’ : invalid character(s) ##报错问题 在安装te…...
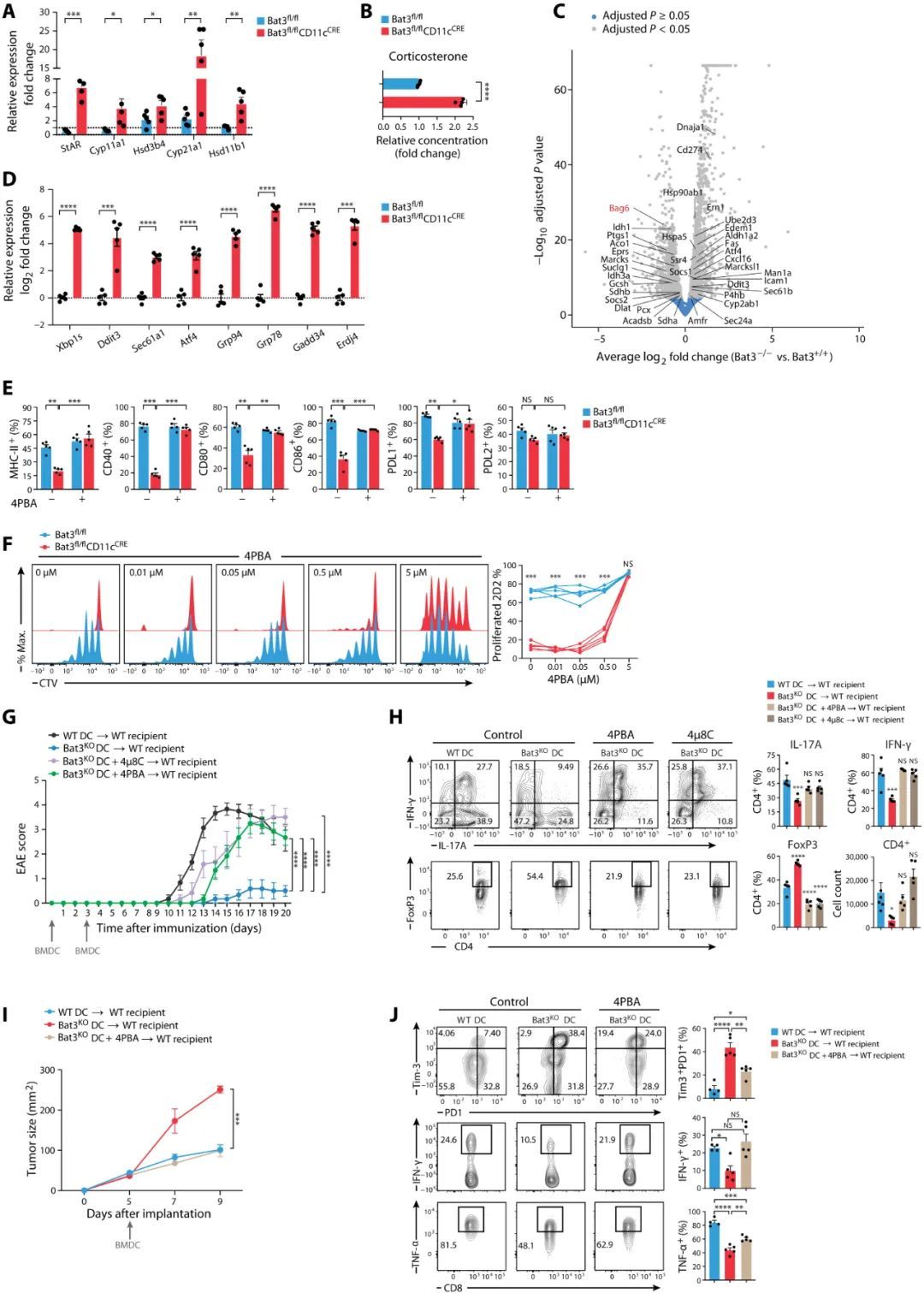
Sci Immunol丨Tim-3 适配器蛋白 Bat3 是耐受性树突状细胞
今天和大家分享一篇发表于2022年3月的文章,题目为“Tim-3 adapter protein Bat3 acts as an endogenous regulator of tolerogenic dendritic cell function”,发表在《Sci Immunol》杂志上。文章主要研究了Tim-3和其适配蛋白Bat3在调节免疫应答中的作用…...
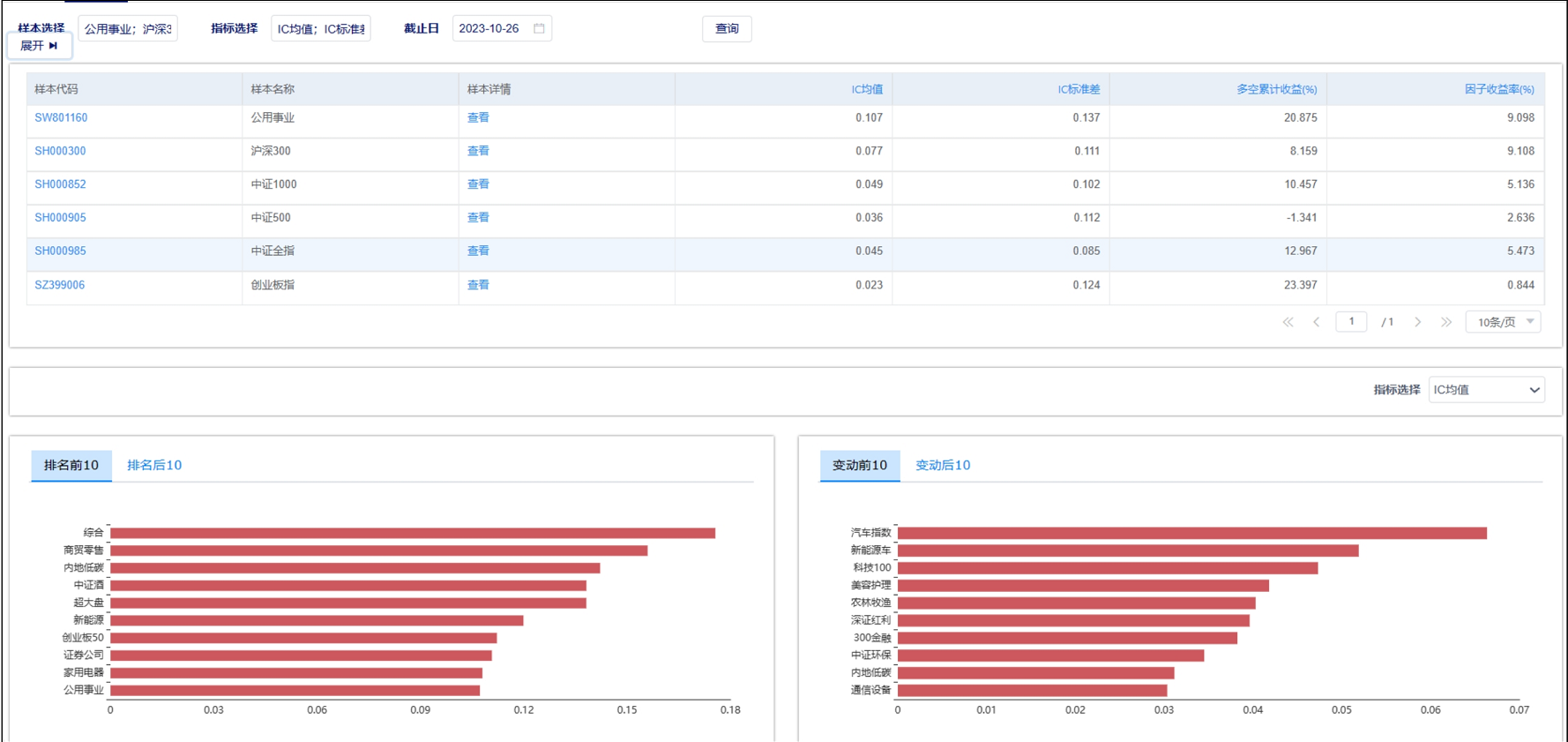
天软特色因子看板(2023.10 第14期)
该因子看板跟踪天软特色因子A05005(近一月单笔流通金额占比(%),该因子为近一个月单笔流通金额占比因子,用以刻画股票在收盘时,主力资金在总交易金额中所占的比重。 今日为该因子跟踪第14期,跟踪其在SW801160 (申万公用事业) 中的表…...
Photoshop(PS)2021版 安装教程(图文教程超详细)
软件:PS版本:2021语言:简体中文大小:2.26G安装环境:Win11/Win10(1809以上版本)硬件要求:CPU2.0GHz 内存4G(或更高,不支持7代以下CPU)下载通道①百度网盘丨64位…...

详解React:Props构建可复用UI的基石
React是一种流行的JavaScript库,用于构建用户界面。它的组件化架构使得开发人员能够轻松地构建可复用的UI元素,从而提高开发效率。在本文中,我们将探讨React中的组件和Props的重要性,以及如何利用它们来构建可复用的UI。 引言 在…...
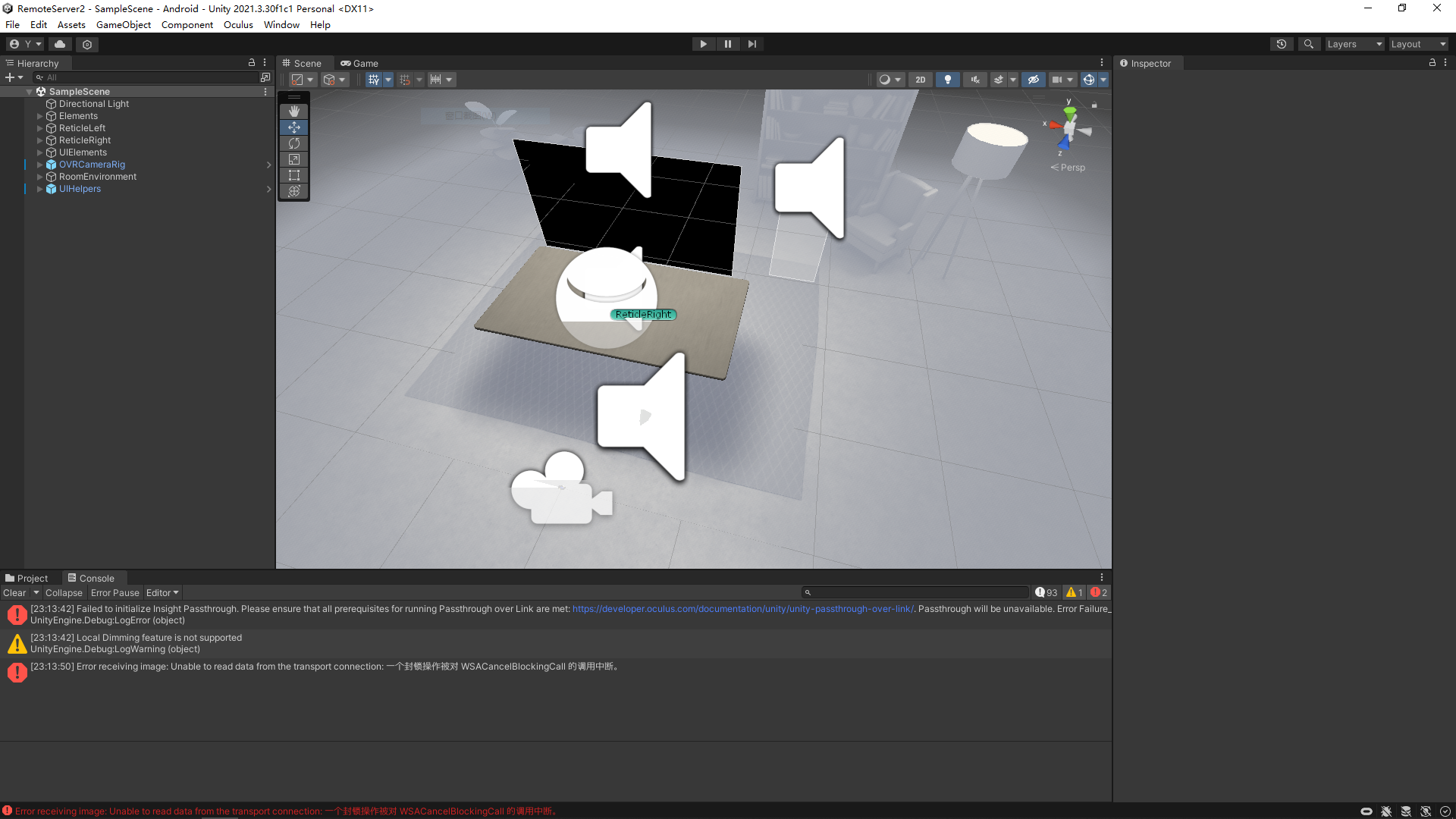
【Unity】【VR开发疑难】Unity运行就报无法启动XR Plugin
【现象】 连接Link后运行Unity的VR项目Link也无反映,Unity控制台报:无法启动XR Plugin,并说是由于Oculus头盔未连接导致。 【分析】 打开Oculus PC客户端,发现状态是连接正常。重启机器后,提示Oculus没有出于RunTim…...
)
本地启动Elasticsearch(docker启动)
一、es版本7.17.0 docker run -p 9200:9200 -p 9300:9300 -e "discovery.typesingle-node" -e ES_JAVA_OPTS"-Xms256m -Xmx256m" -d --name ES01 elasticsearch:7.17.0进入容器,修改/usr/share/elasticsearch/config/elasticsearch.yml 添加如…...
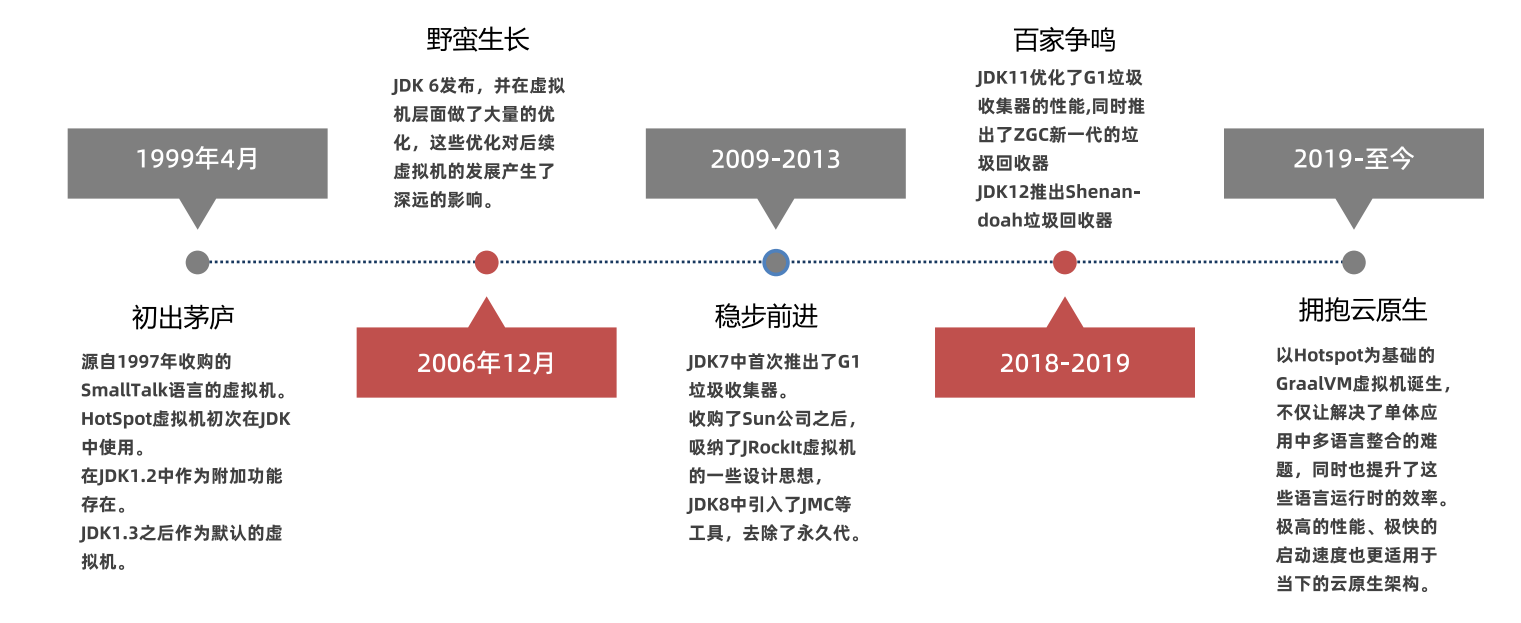
JVM修炼印记之初识
文章目录 JVM认识JVM的功能常见JVMHotSpot的发展历程 JVM认识 Java虚拟机(Java Virtual Machine,JVM)是一个用于执行Java字节码的虚拟计算机。它是Java语言的核心,可以在不同的操作系统和硬件平台上运行Java程序。 JVM负责将Java…...
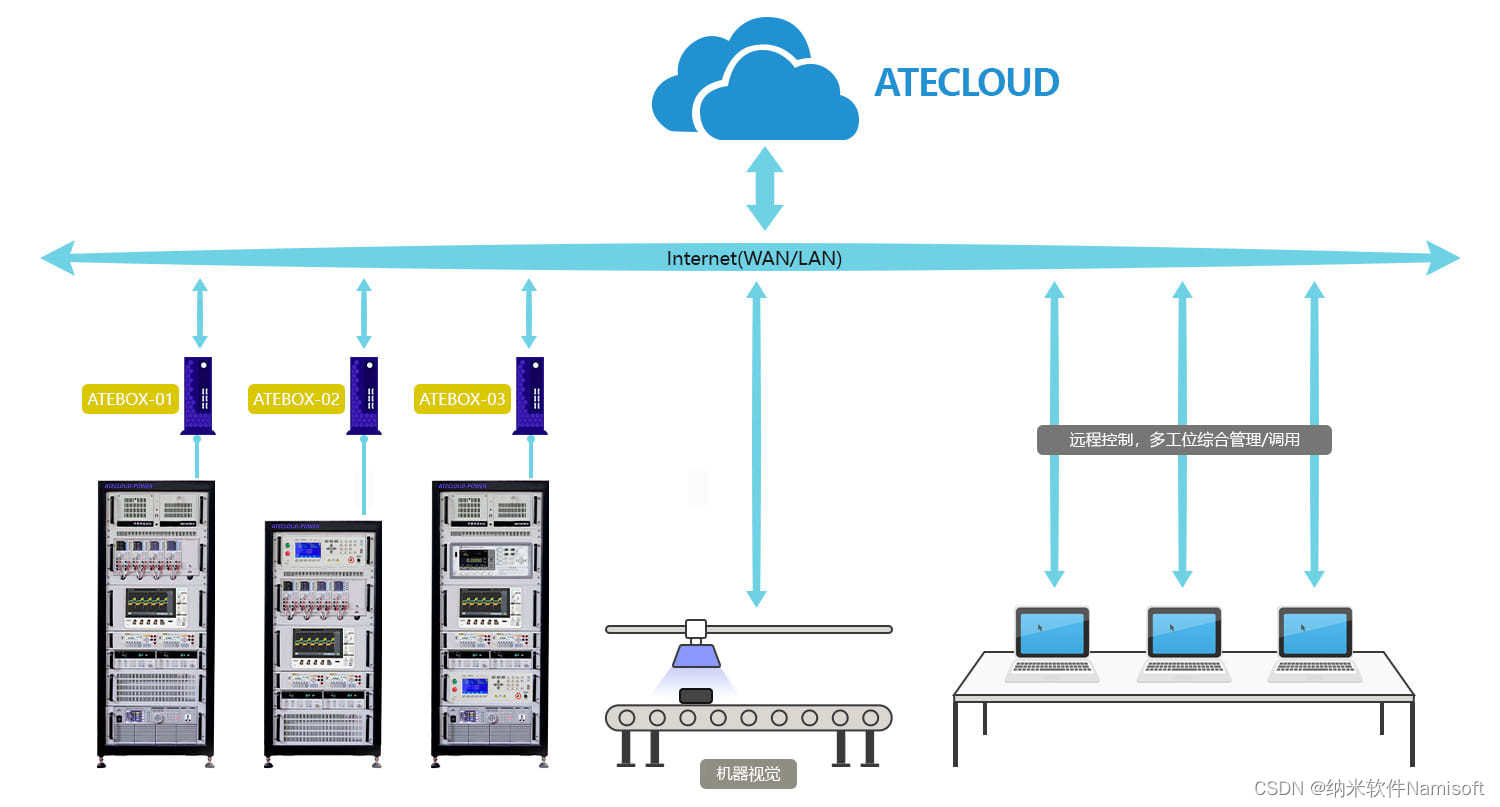
开关电源老化试验和性能检测系统软件
开关电源自动测试系统由PC(工控机)、测试工装、可编程直流电源、数字示波器、可编程直流电子负载、继电器模块等部分组成,并通过RS232/LAN通讯总线、测试夹具以及其它线缆等进行连接,为系统组成结构。PC与可编程直流电源、数字示波器、可编程直流电子负载…...

水库大坝可视化智能远程监管方案,助力安全监测智能巡检
一、背景需求 水库大坝作为防洪度汛的重要设施,其安全问题直接关系到人民群众的生命财产安全。因此,必须加强对大坝水库的安全管理,对水库除险加固和运行管护要消除存量隐患,实现常态化管理,同时要配套完善重点小型水…...

C#学习系列之虚方法和多态
C#学习系列之虚方法和多态 啰嗦设计原则(六大类其中之一)基类的引用使用 共性与差异虚方法和多态的武器使用 其他总结 啰嗦 基础学习。 设计原则(六大类其中之一) **依赖倒置原则:**依赖抽象类,不依赖具体…...

3分钟解锁微信网页版:wechat-need-web插件让你的浏览器变身全能微信客户端
3分钟解锁微信网页版:wechat-need-web插件让你的浏览器变身全能微信客户端 【免费下载链接】wechat-need-web 让微信网页版可用 / Allow the use of WeChat via webpage access 项目地址: https://gitcode.com/gh_mirrors/we/wechat-need-web 还在为工作电脑…...

今天不用就过期:Gemini深度研究模式2024Q3权限变更预警——3类高价值功能即将对免费用户关闭
更多请点击: https://intelliparadigm.com 第一章:Gemini深度研究模式的核心价值与权限变更全景 Gemini深度研究模式(Deep Research Mode)是Google面向专业研究者与开发者推出的增强型推理能力范式,其核心价值在于将多…...

为什么91%的DeepSeek部署在第7轮后开始“失忆”?揭秘KV Cache碎片率超阈值的实时熔断策略
更多请点击: https://codechina.net 第一章:DeepSeek多轮对话优化 DeepSeek系列大模型在多轮对话场景中面临上下文衰减、指代歧义与意图漂移等典型挑战。为提升长程一致性与角色连贯性,需从提示工程、状态管理与响应重校准三个维度协同优化。…...

CleanMyWechat:一键解放你的PC微信存储空间
CleanMyWechat:一键解放你的PC微信存储空间 【免费下载链接】CleanMyWechat 自动删除 PC 端微信缓存数据,包括从所有聊天中自动下载的大量文件、视频、图片等数据内容,解放你的空间。 项目地址: https://gitcode.com/gh_mirrors/cl/CleanMy…...

企业如何利用 Taotoken 为内部知识问答系统集成大模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业如何利用 Taotoken 为内部知识问答系统集成大模型 构建一个高效、可靠的内部知识问答系统,是企业提升信息流转效率…...

工程采购避坑指南:如何挑选靠谱的防火门厂家?从资质到验收全解析
在消防工程采购中,防火门属于强制性消防产品,必须符合国标GB 12955最新标准。市面上厂家众多,价格差距大,很多中间商、小作坊产品看似便宜,实则无法通过消防验收,给工程项目带来巨大风险。👉 点…...

ChatGPT演讲稿写作正在淘汰不会“结构化叙事”的人——2024技术晋升隐性门槛已悄然升级
更多请点击: https://kaifayun.com 第一章:ChatGPT演讲稿写作正在淘汰不会“结构化叙事”的人——2024技术晋升隐性门槛已悄然升级 在2024年一线科技公司的晋升答辩、技术方案汇报与跨部门协同场景中,一个沉默却致命的变化正在发生ÿ…...

终极指南:如何用novel-downloader小说下载器批量保存网络小说
终极指南:如何用novel-downloader小说下载器批量保存网络小说 【免费下载链接】novel-downloader 一个可扩展的通用型小说下载器。 项目地址: https://gitcode.com/gh_mirrors/no/novel-downloader 你是否曾遇到过这种情况:熬夜追更的小说突然从网…...

融合模糊决策与ECSA优化的软件项目智能风险评估框架
1. 项目概述与核心价值在软件工程这个行当里摸爬滚打十几年,我见过太多项目因为对风险的“视而不见”或“束手无策”而走向失败。项目延期、预算超支、质量滑坡,这些问题的根源往往不是技术本身,而是对潜在威胁的评估和应对失当。传统的风险管…...

观测对比,接入 Taotoken 前后 API 调用的平均延迟与成功率变化
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观测对比,接入 Taotoken 前后 API 调用的平均延迟与成功率变化 作为一个技术团队的负责人,在引入新的技术组…...