全国产EtherCAT运动控制边缘控制器(六):RtBasic文件下载与连续轨迹加工的Python+Qt开发
今天,正运动小助手给大家分享一下全国产EtherCAT运动控制边缘控制器ZMC432H如何使用Python+QT实现连续轨迹加工。
01 功能简介
全国产EtherCAT运动控制边缘控制器ZMC432H是正运动的一款软硬件全国产自主可控,运动控制接口兼容EtherCAT总线和脉冲型的独立式运动控制器,最多支持32轴运动控制,同时支持正运动远程HMI功能,能提供网络组态显示,可实时监控和调整参数配置。

ZMC432H具备丰富的硬件接口和控制功能模块,能实现高效稳定的运动控制和实时数据采集,以满足工业控制协同工业互联网的应用需求。
ZMC432H内置了Linux系统,可以使用本地的LOCAL接口进行连接,可以做到更快速的指令交互,单条指令与多条指令一次性交互时间为40us左右。

02 Python+QT进行运动控制开发
一.配置好python +Qt开发环境,以及安装好所需工具
1、下载python解释器。
2、安装pyside2或者pyside6根据python解释器的版本来选择,高版本的解释器使用pyside6。
安装pyside2有以下两种方式:
方式一: 使用win+r打开运行界面,然后输入cmd(在安装python解释器的时候要根据安装向导配置好环境变量,否则后面的指令不会执行成功),pip install pyside2 -i https://pypi.douban.com/simple/ ;
方式二: 在pycharm中安装 。
3、安装好PyCharm Community Edition,在如下界面点击+号,安装所需的工具,如pyside2。

4、在Pycharm中配置自定义工具(用于qt的界面编辑)。
(1)按照如图步骤打开Tool的编辑框。

(2)自定义Pyside2-uic:
a.Program填写: Python安装目录 \Scripts\pyside2-uic.exe;
b.Arguments填写: F i l e N a m e FileName FileName -o F i l e N a m e W i t h o u t E x t e n s i o n FileNameWithoutExtension FileNameWithoutExtension.py;
c.Working directory填写: F i l e D i r FileDir FileDir。

(3)自定义QtDesigner:
a.Program填写: Python安装目录 \Scripts\pyside2-designer.exe;
b.Working directory填写: P r o j e c t F i l e D i r ProjectFileDir ProjectFileDir。

将自定义工具配置好之后就可以直接在PyCharm的菜单中直接使用了。
1、点击Tools → Qt → Qtdesigner即可进入UI的设计界面。

2、右键ui文件,点击Qt → Pyside2-uic即可生成ui文件的py文件。

二.新建Python项目并添加函数库
1、使用PyCharm Community Edition 2022打开一个新建的文件夹或者在进入PyCharm Community Edition 2022之后新建一个目录,并在目录中添加Python文件。

2、找到 找到厂家提供的光盘资料,路径如下。
A.进入厂商提供的光盘资料找到“04.PC函数”文件夹,并点击进入。

B.选择“PC函数库V2.1.1”文件夹。

C.选择“Windows平台”文件夹。

D.选择“库文件与例程”文件夹。

E.选择“PYTHON例程”文件夹。

F.解压对应位数的压缩包。

G.解压后如下图所示。

3、对于Windows系统来说将zauxdll.dll、zmotion.dll以及zauxdllPython.Py文件加入所创建的文件夹内即可。

三.查看PC函数手册,熟悉相关函数接口。
1、PC函数手册也在光盘资料里面,具体路径如下:“光盘资料\04.PC函数\ZMotionPC函数库编程手册及其例程源码\ZMotionPC函数库编程手册 V2.1.1.pdf”。

2、链接控制器,获取链接句柄。
(1)ZAux_OpenEth()接口说明。

(2)下载“.bas”文件到控制器中运行的接口说明。

(3)暂停和恢复控制器内部Basic程序的接口说明。

四.RtBasic文件下载与连续轨迹加工的Python+Qt开发例程。
1、例程界面如下。

2、通过“光盘资料” → “工具软件”里面的“ZmotionCadV1.0导图工具”将CAD图纸里面的图形转换成“.bas”的运动控制代码。
A.打开该工具软件,点击“文件”→“导入”。选择需要转换的dxf格式的CAD图纸并打开。

B.打开后效果如下。

C.点击“文件”→“导出”,导出“.bas”文件。到时候可下载到控制卡里面进行以上轨迹的运动控制。

D.CAD导图软件的具体使用方法参考往期文章正运动技术CAD导图软件配合控制器的使用方法。
3、程序示例如下。
(1)Python中加载qt的UI文件;
from PySide2.QtWidgets import QMessageBox
from PySide2.QtCore import QFile, QTimer
from PySide2.QtUiTools import QUiLoader
q_state_file = QFile("mainweiget.ui")
q_state_file.open(QFile.ReadOnly)
self.ui = QUiLoader().load(q_state_file)
q_state_file.close()
注:此时 self.ui表示了qt中的ui。
(2) 链接按钮的事件处理函数中调用链接控制器的接口函数ZAux_OpenEth(),与控制器进行链接,链接成功后启动定时器1监控控制器状态。
def on_btn_open_clicked(self):strtemp = self.ui.comboBox.currentText()print("当前的ip是 :", strtemp)if self.Zmc.handle.value is not None:self.Zmc.close()self.time1.stop()self.ui.setWindowTitle("单轴回零")iresult = self.Zmc.open_eth(strtemp)if 0 != iresult:QMessageBox.warning(self.ui, "提示", "连接失败")else:QMessageBox.warning(self.ui, "提示", "连接成功")str_title = self.ui.windowTitle() + strtempself.ui.setWindowTitle(str_title)self.Up_State()self.time1.start(100)
(3) 通过定时器监控控制器状态。
def Up_State(self):idlelist = [ctypes.c_int(-1) for i in range(0, 4)]fdposlist = [ctypes.c_float(0) for i in range(0, 4)]for i in range(0, 4):self.Zmc.get_target_pos(i, fdposlist[i]) # 获取当前轴位置self.Zmc.get_idle(i, idlelist[i]) # 判断当前轴状态str1 = " {} {} ".format("停止中" if idlelist[0].value else "运行中", round(fdposlist[0].value, 2))self.ui.lineEdit_X.setText(str1)str1 = " {} {} ".format("停止中" if idlelist[1].value else "运行中", round(fdposlist[1].value, 2))self.ui.lineEdit_Y.setText(str1)str1 = " {} {} ".format("停止中" if idlelist[2].value else "运行中", round(fdposlist[2].value, 2))self.ui.lineEdit_Z.setText(str1)str1 = " {} {} ".format("停止中" if idlelist[3].value else "运行中", round(fdposlist[3].value, 2))self.ui.lineEdit_R.setText(str1)
(4)通过“选择bas文件”按钮的事件处理函数选择对应的bas文件。
def on_btn_DownBas_clicked(self):if self.Zmc.handle.value is None:QMessageBox.warning(self.ui, "提示", "未连接控制器")returnfile_Date = QFileDialog.getOpenFileName(self.ui, "选择BAS文件", "..", "Files(*.bas)")self.file_Name = file_Date[0].replace("/", "\\")print(self.file_Name)if self.file_Name == "":returnself.ui.textEdit_FilePath.insertPlainText(self.file_Name + "\n")
(5)通过“启动”按钮的事件处理函数来下载和启动选择的bas文件。
if self.Zmc.handle.value is None:QMessageBox.warning(self.ui, "警告", "未连接控制器")return
# 设定轴0轴类型
str_tmp = self.ui.edit_Atype_0.text()
float_tmp = int(str_tmp)
self.Zmc.set_axis_type(0, float_tmp)
# 设定轴0轴类型
str_tmp = self.ui.edit_Atype_1.text()
float_tmp = int(str_tmp)
self.Zmc.set_axis_type(1, float_tmp)
# 设定脉冲模式及逻辑方向(脉冲 + 方向)
self.Zmc.set_invert_step(self.axis_Num, 0)
# 设置当量
str_tmp = self.ui.edit_Units_0.text()
float_tmp = float(str_tmp)
self.Zmc.set_units(0, float_tmp)
str_tmp = self.ui.edit_Units_1.text()
float_tmp = float(str_tmp)
self.Zmc.set_units(1, float_tmp)
# 设置速度
str_tmp = self.ui.edit_Speed_0.text()
float_tmp = float(str_tmp)
self.Zmc.set_speed(0, float_tmp)
str_tmp = self.ui.edit_Speed_1.text()
float_tmp = float(str_tmp)
self.Zmc.set_speed(1, float_tmp)
# 设置加速度
str_tmp = self.ui.edit_Accel_0.text()
float_tmp = float(str_tmp)
self.Zmc.set_acceleration(0, float_tmp)
str_tmp = self.ui.edit_Accel_1.text()
float_tmp = float(str_tmp)
self.Zmc.set_acceleration(1, float_tmp)
# 设置减速度
self.Zmc.set_deceleration(0, 0)
self.Zmc.set_deceleration(1, 0)
#开启连续插补
str_tmp = self.ui.edit_Merge_0.text()
float_tmp = int(str_tmp)
self.Zmc.set_merge(0,float_tmp)
str_tmp = self.ui.edit_Merge_1.text()
float_tmp = int(str_tmp)
self.Zmc.set_merge(1, float_tmp)
if self.file_Name == "":return
ret = self.Zmc.bas_down(self.file_Name, 1) # 下载到ROM 运行
if ret != 0:QMessageBox.warning(self.ui, "提示", "文件下载失败!" + "错误码为 :{} ".format(ret))
return
注:“.bas”文件也可以通过我们的ZDevelop软件下载。ZAux_BasDown指令会将单个bas文件生成ZAR并且下载到控制器运行。
(6)通过停止、暂停、继续按钮的事件处理函数来实现控制器。
def on_btn_stop_clicked(self):if self.Zmc.handle.value is None:QMessageBox.warning(self.ui, "警告", "未连接控制器")returnbuffer = (ctypes.c_char * 1024)()ret = self.Zmc.execute("STOPTASK 0", buffer, 0)ret = self.Zmc.rapid_stop(2)
def on_btn_Pause_clicked(self):ret = self.Zmc.bas_pause()if ret != 0:QMessageBox.warning(self.ui, "提示", "运动暂停失败!" + "错误码为 :{} ".format(ret))return
def on_btn_Resume_clicked(self):ret = self.Zmc.bas_resume()if ret != 0:QMessageBox.warning(self.ui, "提示", "运动恢复失败!" + "错误码为 :{} ".format(ret))return
03 调试与监控
编译运行例程,同时通过ZDevelop软件连接控制器对控制器状态进行监控。
ZDevelop软件连接控制器打开调试模式可以查看控制器里面的“.bas”文件的文件名。

通过ZDevelop软件的示波器功能对连续小线段的波形进行抓取,下面是示波器波形和CAD图纸的比较。
比较如下图所示。


例程讲解视频。
连续轨迹加工例程讲解
本次,正运动技术全国产EtherCAT运动控制边缘控制器(六):RtBasic文件下载与连续轨迹加工的Python+QT开发,就分享到这里。更多精彩内容请关注“ 正运动小助手 ”公众号。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。正运动技术汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础技术的研究,是国内工控领域发展最快的企业之一,也是国内少有、完整掌握运动控制核心技术和实时工控软件平台技术的企业。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位_XPCIe/XPCI系列运动控制卡等等。
相关文章:
全国产EtherCAT运动控制边缘控制器(六):RtBasic文件下载与连续轨迹加工的Python+Qt开发
今天,正运动小助手给大家分享一下全国产EtherCAT运动控制边缘控制器ZMC432H如何使用PythonQT实现连续轨迹加工。 01 功能简介 全国产EtherCAT运动控制边缘控制器ZMC432H是正运动的一款软硬件全国产自主可控,运动控制接口兼容EtherCAT总线和脉冲型的独立…...

git代码行统计
本文介绍统计项目代码行的方式,包括使用git log统计、git ls-files统计和使用linux命令行方式统计。 一、使用git log统计 1.统计所有代码行数 当前代码都存放在git仓库下,当需进行代码行数统计时,让开发人员在代码路径下运行如下指令&…...

LEEDCODE 2235两整数相加
class Solution { public:int sum(int num1, int num2) {return (num1 num2);} };...
魔术般的速度,焕然一新的磁盘空间 - Magic Disk Cleaner for Mac 2023
在当今这个信息时代,我们的磁盘空间无时无刻不在被各种文件和数据所填满。无论是工作文件,还是日常生活的照片、视频,亦或是下载的各种应用程序,都在不断地蚕食着我们的磁盘空间。面对这种情况,一款高效、便捷的磁盘垃…...

项目切换多租户导致的数据库SQL执行异常
先贴异常日志 java.lang.reflect.InvocationTargetException at sun.reflect.NativeMethodAccessorImpl.invoke0(Native Method) at sun.reflect.NativeMethodAccessorImpl.invoke(NativeMethodAccessorImpl.java:62) at sun.reflect.DelegatingMethodAccessorImpl.invoke(D…...
安防视频监控平台EasyCVR服务器需要开启firewalld防火墙,该如何开放端口?
智能视频监控/视频云存储/集中存储/视频汇聚平台EasyCVR具备视频融合汇聚能力,作为安防视频监控综合管理平台,它支持多协议接入、多格式视频流分发,视频监控综合管理平台EasyCVR支持海量视频汇聚管理,可应用在多样化的场景上&…...
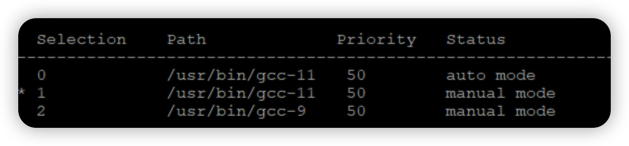
Ubuntu Desktop 20.04升级gcc-11
默认自带的gcc是9,需要升级到11 sudo add-apt-repository ppa:ubuntu-toolchain-r/test sudo apt update sudo apt install gcc-11 sudo apt install g11 sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-9 50 sudo update-alternatives -…...
网站如何改成HTTPS访问
在今天的互联网环境中,将网站更改成HTTPS访问已经成为了一种标准做法。HTTPS不仅有助于提高网站的安全性,还可以提高搜索引擎排名,并增强用户信任。因此,转换为HTTPS是一个重要的举措,无论您拥有个人博客、电子商务网站…...
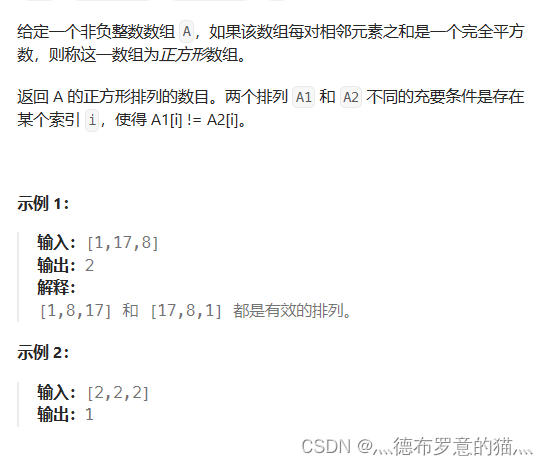
LeetCode 996.正方形数组的数目
和上一道状压的区别在于我们要去重一下~ 思路都是和上一篇博客是一样的,感兴趣的同学可以看一下 const int N 15; int dp[1<<N][N]; int n; vector<int>nums1;bool check(int x){int tem sqrt(x);if(tem*temx)return 1;return 0; }int dfs(int u,in…...
vue3写nav滚动事件中悬停在顶部
1. 防抖类Animate, 使用requestAnimationFrame代替setTimeout 也可以使用节流函数, lodash有现成的防抖和节流方法 _.debounce防抖 _.throttle节流 export default class Animate {constructor() {this.timer null;}start (fn) > {if (!fn) {throw new Error(需要执行…...

关于qiling->UC_ERR_FETCH_UNMAPPED等执行EXE时内存错误的问题
该文章遇到的问题简述: 使用wsl虚拟机,正常走了qiling配置流程后无法使用qiling对样例之外的exe进行模拟,会在执行到dll时,在dll的代码中报出内存未分配等读写错误。系统:kali、ubuntu20、ubuntu22。 解决࿱…...

语言模型和人类的推理都依赖内容
人类不太擅长逻辑,需要依赖内容直觉进行推理。许多认知研究表明,人类的推理并不是完全抽象的(不是完全的形式与内容分离)。 相反,我们的推理取决于问题的内容: 当内容支持逻辑推理时,我们回答…...
5.1 运输层协议概述
思维导图: 前言: 第5章 运输层笔记 1. 概览 主要内容:介绍运输层协议的特点、进程间通信、端口、UDP和TCP协议、可靠传输、TCP报文段的首部格式、TCP的关键概念(如滑动窗口、流量控制、拥塞控制和连接管理)。重要性…...
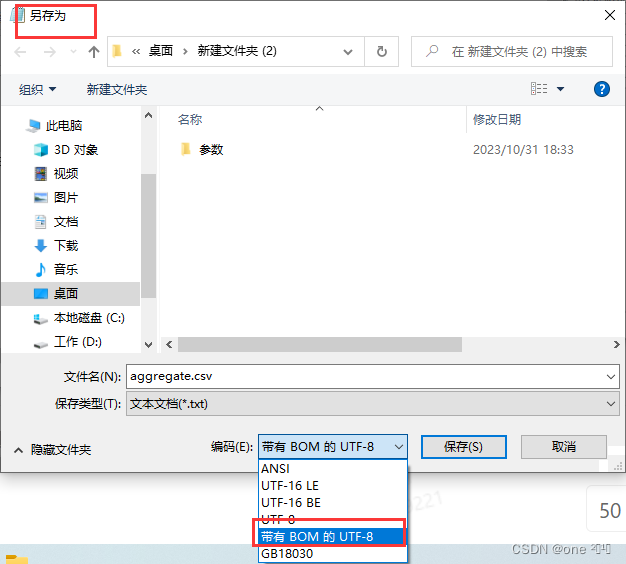
Jmeter保存csv数据文件出现乱码
在Jmeter的聚合报告中,点击“Save Table Data”,打开保存的CSV文件中文出现乱码。这是因为CSV文件的格式不是UTF-8导致。 解决办法如下: 方法:使用记事本打开csv文件(打开方式选择记事本),点击左上角菜单“文件-》另存…...

双闭环直流电机调速系统设计
要 在我们日常生活中,无刷直流电机随处可见,因为其相比其他电机而言结构相对简单,运行稳定且便于维修等优势,最重要的是直流电机在调速方面具有很好的优势。随着自动控制技术和微电子技术的不断革新,目前的技术水平为…...

[ poi-表格导出 ] java.lang.NoClassDefFoundError: org/apache/poi/POIXMLTypeLoader
解决报错: org.springframework.web.util.NestedServletException: Handler dispatch failed; nested exception is java.lang.NoClassDefFoundError: org/apache/poi/POIXMLTypeLoader 报错描述: 表格导出本来使用正常,偶然就报了以上错误…...
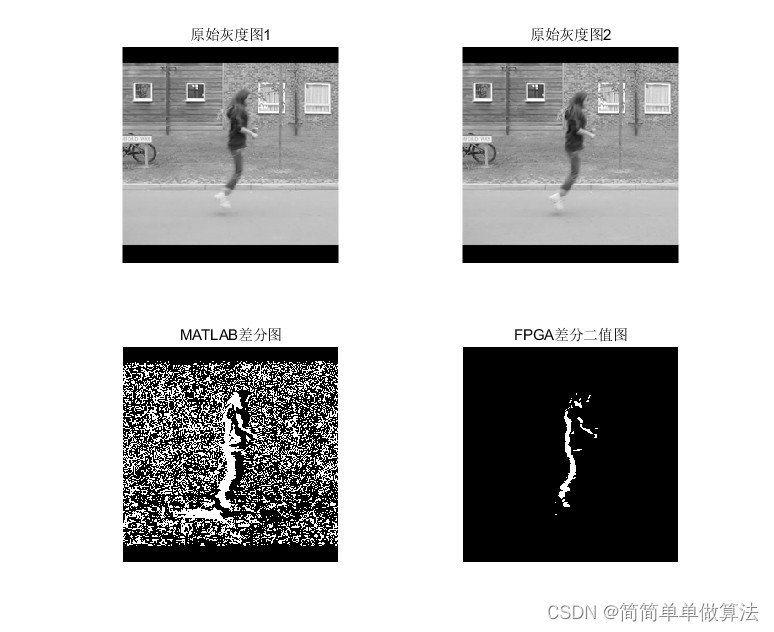
基于FPGA的图像差分运算及目标提取实现,包含testbench和MATLAB辅助验证程序
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本 matlab2022a 3.部分核心程序 timescale 1ns / 1ps // // Company: // Engineer: // // Create Date: 2022/07/28 01:51:…...

闭环思维笔记
这本书的情况我已经看完了,道理方面还是不错的,但案例方面跟我前几年在抖音看到的畅销书的案例一样,答辩,所以要看的人一定要根据不同的情况和场景去实施。 闭环思维的核心就是有始、有终、有反馈,在开始和结束过程中前…...
JMeter如何开展性能测试
文章目录 性能测试指标理解透彻以及测算微聊性能测试性能测试流程准备流程 👑作者主页:Java冰激凌 性能测试指标理解透彻以及测算 虚拟用户数: 线程 用户并发数:指在某一时间,一定数量的虚拟用户同时对系统的某个功…...
使用logback按天生成日志并按等级进行分类
先看效果---->>>> 按照:error、info、warn进行分类: 每个文件里面按日期进行分类: 其中对应的Maven如下: <?xml version"1.0" encoding"UTF-8"?> <project xmlns"http://maven…...

Display Driver Uninstaller完整攻略:显卡驱动清理的终极解决方案
Display Driver Uninstaller完整攻略:显卡驱动清理的终极解决方案 【免费下载链接】display-drivers-uninstaller Display Driver Uninstaller (DDU) a driver removal utility / cleaner utility 项目地址: https://gitcode.com/gh_mirrors/di/display-drivers-u…...

容器镜像加速实战:3种方案彻底解决国内拉取难题
容器镜像加速实战:3种方案彻底解决国内拉取难题 【免费下载链接】public-image-mirror 很多镜像都在国外。比如 gcr 。国内下载很慢,需要加速。致力于提供连接全世界的稳定可靠安全的容器镜像服务。 项目地址: https://gitcode.com/GitHub_Trending/pu…...

2026AI论文软件实测排行榜!这几款才是真神器
综合评分 TOP4 为千笔AI(99/100)、毕业之家 (96/100)、DeepSeek Scholar(89/100)、豆包学术版 (88/100)。千笔AI是全流程全能王,毕业之家专注学术合规,DeepSeek 是理工科免费神器,豆包擅长多模态与文献分析。一、测评标准说明(202…...

如何在Chrome中轻松下载视频?VideoDownloadHelper开源插件完全指南
如何在Chrome中轻松下载视频?VideoDownloadHelper开源插件完全指南 【免费下载链接】VideoDownloadHelper Chrome Extension to Help Download Video for Some Video Sites. 项目地址: https://gitcode.com/gh_mirrors/vi/VideoDownloadHelper 还在为无法下载…...
SPF-10G-T :10G 电口模块,重塑短距网络升级性价比)
安科士(AndXe)SPF-10G-T :10G 电口模块,重塑短距网络升级性价比
数字化转型浪潮下,企业园区、数据中心对10Gbps 高速互联的需求呈爆发式增长。但传统 10G 升级方案深陷困境:光纤布线成本高昂、施工周期长且需专业运维技能,而多数企业机架内、相邻机架间及办公楼层内的链路距离普遍低于 30 米,光…...

VN设备通道乱序问题解析与Vector硬件固定配置实战
1. 问题根源:为什么VN设备的通道会“乱跑”?在汽车电子测试领域,Vector的VN系列设备(如VN1640A、VN1610等)是进行CAN、LIN、FlexRay等总线通信测试与仿真的核心工具。当我们在一个复杂的台架上部署了多台同型号的VN设备…...

PdrER算法:扩展解析在模型检查中的高效应用
1. PdrER算法核心原理与技术突破1.1 传统PDR算法的局限性分析Property Directed Reachability(PDR,也称为IC3)是当前最先进的模型检查算法之一,广泛应用于硬件和软件系统的安全属性验证。该算法通过构建归纳不变量(ind…...

探索Pandas groupby的各种技巧和应用实例
groupby是Pandas中用于数据分析的重要工具,它允许我们根据特定列的不同值,对数据行进行灵活分组。分组后的数据可用于生成各类聚合值,从而帮助我们深入了解数据。在Pandas中,如果你想要分析数据的潜在模式或趋势,group…...

什么是占位符
占位符就是字符串里预留空位,后面填上真实数据,PyCharm里直接写代码就能运行调试1.%格式化占位符(旧式格式化)语法格式:"模板字符串"%(数据1,数据2...)基础类型占位符1.%s :适配字符串…...

【Lovable前端开发实战指南】:20年专家亲授5个让团队抢着用的可维护性设计模式
更多请点击: https://kaifayun.com 第一章:Lovable前端开发的核心理念与可维护性本质 Lovable前端开发并非追求炫酷动效或技术堆砌,而是以人本设计为原点,将开发者体验(DX)与用户界面体验(UX&a…...