Pure-Pursuit 跟踪双移线 Gazebo 仿真
Pure-Pursuit 跟踪双移线 Gazebo 仿真
主要参考学习下面的博客和开源项目
自动驾驶规划控制(A*、pure pursuit、LQR算法,使用c++在ubuntu和ros环境下实现)
https://github.com/NeXTzhao/planning
Pure-Pursuit 的理论基础见今年六月份的笔记
对参考轨迹进行调整,采用双移线轨迹
#include <geometry_msgs/PoseStamped.h>
#include <geometry_msgs/Quaternion.h>
#include <nav_msgs/Path.h>
#include <ros/ros.h>
#include <std_msgs/String.h>
#include <iostream>
#include <string>
#include <vector>
#include <math.h>
#include <fstream>
using namespace std;// 双移线构造的参数
const float shape = 2.4;
const float dx1 = 25.0, dx2 = 21.95;
const float dy1 = 4.05, dy2 = 5.7;
const float Xs1 = 27.19, Xs2 = 56.46;
// 参考路径在 X 方向长度以及参考点的步长
const float length = 120.0;
const float step = 0.1;// 计算 Y 轴参考位置
inline float calculate_reference_y(const float ref_x)
{float z1 = shape / dx1 * (ref_x - Xs1) - shape / 2.0;float z2 = shape / dx2 * (ref_x - Xs2) - shape / 2.0;return dy1 / 2.0 * (1 + tanh(z1)) - dy2 / 2.0 * (1 + tanh(z2));
}int main(int argc, char *argv[])
{ros::init(argc, argv, "DoubleLane");ros::NodeHandle nh;ros::Publisher path_pub = nh.advertise<nav_msgs::Path>("/double_lane", 1000, true);nav_msgs::Path reference_path;reference_path.header.frame_id = "world";reference_path.header.stamp = ros::Time::now();geometry_msgs::PoseStamped pose;pose.header.stamp = ros::Time::now();pose.header.frame_id = "world";int points_size = length / step;reference_path.poses.resize(points_size + 1);for (int i = 0; i <= points_size; ++i){float ref_x = i * step;float ref_y = calculate_reference_y(ref_x);// cout << ref_x << "\t" << ref_y << endl;pose.pose.position.x = ref_x;pose.pose.position.y = ref_y;pose.pose.position.z = 0.0;pose.pose.orientation.x = 0.0;pose.pose.orientation.y = 0.0;pose.pose.orientation.z = 0.0;pose.pose.orientation.w = 0.0;reference_path.poses[i] = pose;}ros::Rate loop(10);while (ros::ok()){path_pub.publish(reference_path);ros::spinOnce();loop.sleep();}return 0;
}
编程方面进行了一些简单的优化,轨迹跟踪的算法在 poseCallback 中实现,和博主有所区别
#include <geometry_msgs/Twist.h>
#include <nav_msgs/Path.h>
#include <ros/ros.h>
#include <tf/tf.h>
#include <tf/transform_broadcaster.h>#include <algorithm>
#include <cassert>
#include <cmath>
#include <fstream>
#include <iostream>
#include <string>
#include <vector>#include "cpprobotics_types.h"
#include "cubic_spline.h"
#include "geometry_msgs/PoseStamped.h"#define PREVIEW_DIS 1.5 // 预瞄距离#define Ld 1.868 // 轴距using namespace std;
using namespace cpprobotics;ros::Publisher purepersuit_;
ros::Publisher path_pub_;
nav_msgs::Path path;float carVelocity = 0;
float preview_dis = 0;
float k = 0.1;// 计算四元数转换到欧拉角
std::array<float, 3> calQuaternionToEuler(const float x, const float y,const float z, const float w)
{std::array<float, 3> calRPY = {(0, 0, 0)};// roll = atan2(2(wx+yz),1-2(x*x+y*y))calRPY[0] = atan2(2 * (w * x + y * z), 1 - 2 * (x * x + y * y));// pitch = arcsin(2(wy-zx))calRPY[1] = asin(2 * (w * y - z * x));// yaw = atan2(2(wx+yz),1-2(y*y+z*z))calRPY[2] = atan2(2 * (w * z + x * y), 1 - 2 * (y * y + z * z));return calRPY;
}cpprobotics::Vec_f r_x_;
cpprobotics::Vec_f r_y_;int pointNum = 0; // 保存路径点的个数
int targetIndex = pointNum - 1;// 计算发送给模型车的转角
void poseCallback(const geometry_msgs::PoseStamped ¤tWaypoint)
{auto currentPositionX = currentWaypoint.pose.position.x;auto currentPositionY = currentWaypoint.pose.position.y;auto currentPositionZ = 0.0;auto currentQuaternionX = currentWaypoint.pose.orientation.x;auto currentQuaternionY = currentWaypoint.pose.orientation.y;auto currentQuaternionZ = currentWaypoint.pose.orientation.z;auto currentQuaternionW = currentWaypoint.pose.orientation.w;std::array<float, 3> calRPY =calQuaternionToEuler(currentQuaternionX, currentQuaternionY,currentQuaternionZ, currentQuaternionW);cout << currentPositionX << "\t" << currentPositionY << "\t" << calRPY[2] << endl;for (int i = pointNum - 1; i >= 0; --i){float distance = sqrt(pow((r_x_[i] - currentPositionX), 2) +pow((r_y_[i] - currentPositionY), 2));if (distance < preview_dis){targetIndex = i + 1;break;}}if (targetIndex >= pointNum){targetIndex = pointNum - 1;}float alpha =atan2(r_y_[targetIndex] - currentPositionY, r_x_[targetIndex] - currentPositionX) -calRPY[2];// 当前点和目标点的距离Idfloat dl = sqrt(pow(r_y_[targetIndex] - currentPositionY, 2) +pow(r_x_[targetIndex] - currentPositionX, 2));// 发布小车运动指令及运动轨迹if (targetIndex == pointNum - 1 && dl < 0.2) // 离终点很近时停止运动{geometry_msgs::Twist vel_msg;vel_msg.linear.x = 0;vel_msg.angular.z = 0;purepersuit_.publish(vel_msg);}else{float theta = atan(2 * Ld * sin(alpha) / dl);geometry_msgs::Twist vel_msg;vel_msg.linear.x = 3;vel_msg.angular.z = theta;purepersuit_.publish(vel_msg);// 发布小车运动轨迹geometry_msgs::PoseStamped this_pose_stamped;this_pose_stamped.pose.position.x = currentPositionX;this_pose_stamped.pose.position.y = currentPositionY;geometry_msgs::Quaternion goal_quat = tf::createQuaternionMsgFromYaw(theta);this_pose_stamped.pose.orientation.x = currentQuaternionX;this_pose_stamped.pose.orientation.y = currentQuaternionY;this_pose_stamped.pose.orientation.z = currentQuaternionZ;this_pose_stamped.pose.orientation.w = currentQuaternionW;this_pose_stamped.header.stamp = ros::Time::now();this_pose_stamped.header.frame_id = "world";path.poses.push_back(this_pose_stamped);}path_pub_.publish(path);
}void velocityCall(const geometry_msgs::TwistStamped &carWaypoint)
{carVelocity = carWaypoint.twist.linear.x;// 预瞄距离计算preview_dis = k * carVelocity + PREVIEW_DIS;
}void pointCallback(const nav_msgs::Path &msg)
{// 避免参考点重复赋值if (pointNum != 0){return;}// geometry_msgs/PoseStamped[] posespointNum = msg.poses.size();// 提前开辟内存r_x_.resize(pointNum);r_y_.resize(pointNum);for (int i = 0; i < pointNum; i++){r_x_[i] = msg.poses[i].pose.position.x;r_y_[i] = msg.poses[i].pose.position.y;}
}
int main(int argc, char **argv)
{// 创建节点ros::init(argc, argv, "pure_pursuit");// 创建节点句柄ros::NodeHandle n;// 创建Publisher,发送经过pure_pursuit计算后的转角及速度purepersuit_ = n.advertise<geometry_msgs::Twist>("/smart/cmd_vel", 20);path_pub_ = n.advertise<nav_msgs::Path>("/rvizpath", 100, true);// ros::Rate loop_rate(10);path.header.frame_id = "world";// 设置时间戳path.header.stamp = ros::Time::now();geometry_msgs::PoseStamped pose;pose.header.stamp = ros::Time::now();// 设置参考系pose.header.frame_id = "world";ros::Subscriber splinePath = n.subscribe("/double_lane", 20, pointCallback);ros::Subscriber carVel = n.subscribe("/smart/velocity", 20, velocityCall);ros::Subscriber carPose = n.subscribe("/smart/rear_pose", 20, poseCallback);ros::spin();return 0;
}
这里和 CarSim-Simulink 联合仿真的代码类似
function [sys,x0,str,ts] = MY_MPCController3(t,x,u,flag)
% 该函数是写的第3个S函数控制器(MATLAB版本:R2011a)
% 限定于车辆运动学模型,控制量为速度和前轮偏角,使用的QP为新版本的QP解法
% [sys,x0,str,ts] = MY_MPCController3(t,x,u,flag)
%
% is an S-function implementing the MPC controller intended for use
% with Simulink. The argument md, which is the only user supplied
% argument, contains the data structures needed by the controller. The
% input to the S-function block is a vector signal consisting of the
% measured outputs and the reference values for the controlled
% outputs. The output of the S-function block is a vector signal
% consisting of the control variables and the estimated state vector,
% potentially including estimated disturbance states.switch flag,case 0[sys,x0,str,ts] = mdlInitializeSizes; % Initializationcase 2sys = mdlUpdates(t,x,u); % Update discrete statescase 3sys = mdlOutputs(t,x,u); % Calculate outputscase {1,4,9} % Unused flagssys = [];otherwiseerror(['unhandled flag = ',num2str(flag)]); % Error handling
end
% End of dsfunc.%==============================================================
% Initialization
%==============================================================function [sys,x0,str,ts] = mdlInitializeSizes
% Call simsizes for a sizes structure, fill it in, and convert it
% to a sizes array.
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 4; % this parameter doesn't matter
sizes.NumOutputs = 1;
sizes.NumInputs = 5;
sizes.DirFeedthrough = 1; % Matrix D is non-empty.
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 =[0.00001;0.00001;0.00001;0.00001];
global U; % store current ctrl vector:[vel_m, delta_m]
U=[0];global cx;
cx = 0:0.01:160;
global cy;
shape=2.4;%参数名称,用于参考轨迹生成
dx1=25;dx2=21.95;%没有任何实际意义,只是参数名称
dy1=4.05;dy2=5.7;%没有任何实际意义,只是参数名称
Xs1=27.19;Xs2=56.46;%参数名称
for i = 1:length(cx) %全局路径c(y)生成 路径初始化z1=shape/dx1*(cx(i)-Xs1)-shape/2;z2=shape/dx2*(cx(i)-Xs2)-shape/2;cy(i) = dy1/2*(1+tanh(z1))-dy2/2*(1+tanh(z2));
end% Initialize the discrete states.
str = []; % Set str to an empty matrix.
ts = [0.05 0]; % sample time: [period, offset]
%End of mdlInitializeSizes%==============================================================
% Update the discrete states
%==============================================================
function sys = mdlUpdates(t,x,u)sys = x;
%End of mdlUpdate.%==============================================================
% Calculate outputs
%==============================================================
function sys = mdlOutputs(t,x,u)global U; %store chi_tilde=[vel-vel_ref; delta - delta_ref]global cx;global cy;pi = 3.1415926;ticfprintf('Update start, t=%6.3f\n',t);x = u(1);y = u(2);yaw_angle =u(3)*pi/180;%CarSim输出的Yaw angle为角度,角度转换为弧度v = u(4) / 3.6;k = 0.1; % look forward gain 前向预测距离所用增益Lfc = 3; % 基础预瞄距离L = 2.7; % [m] wheel base of vehicleLd = k * v + Lfc;N = length(cx);ind = N;for i = N : -1 : 1distance = sqrt((cx(i)-x)^2 + (cy(i)-y)^2);if distance < Ldind = i + 1;break;endendif ind > Nind = N; endtx = cx(ind);ty = cy(ind);Ld = sqrt((tx-x)^2 + (ty-y)^2);alpha = atan((ty-y)/(tx-x))-yaw_angle; %该处定义向左转为alpha=beta-Fai,所以向右转就输出-alphadelta = atan(2*L * sin(alpha)/Ld); %前轮转角U = delta;sys= U; % vel, steering, x, ytoc
% End of mdlOutputs.
注意处理接近终点的情况,不加限制的话容易出现绕着终点转圈的现象

限制后整体的跟踪效果尚可,但在终点处仍旧会出现异常的偏航,仍有较大的优化空间




相关文章:
Pure-Pursuit 跟踪双移线 Gazebo 仿真
Pure-Pursuit 跟踪双移线 Gazebo 仿真 主要参考学习下面的博客和开源项目 自动驾驶规划控制(A*、pure pursuit、LQR算法,使用c在ubuntu和ros环境下实现) https://github.com/NeXTzhao/planning Pure-Pursuit 的理论基础见今年六月…...

Selenium学习(Java + Edge)
Selenium /səˈliːniəm/ 1. 简介 Selenium是一个用于Web应用程序自动化测试工具。Selenium测试直接运行在浏览器中,就像真正的用户在操作一样。支持的浏览器包括IE、Mozilla Firefox、Safari、Google Chrome、Opera、Edge等。 适用于自动化测试&#x…...

项目管理-组织战略类型和层次讲解
组织战略类型和层次 对于不同的组织战略可能会采用不同的项目管理形式,组织作为项目管理的载体,其战略决策对项目管理体系的架构,对组织与项目之间责权利的划分具有深远的影响,组织的战略文化也会影响到项目的组织文化氛围。因此…...
面试算法50:向下的路径节点值之和
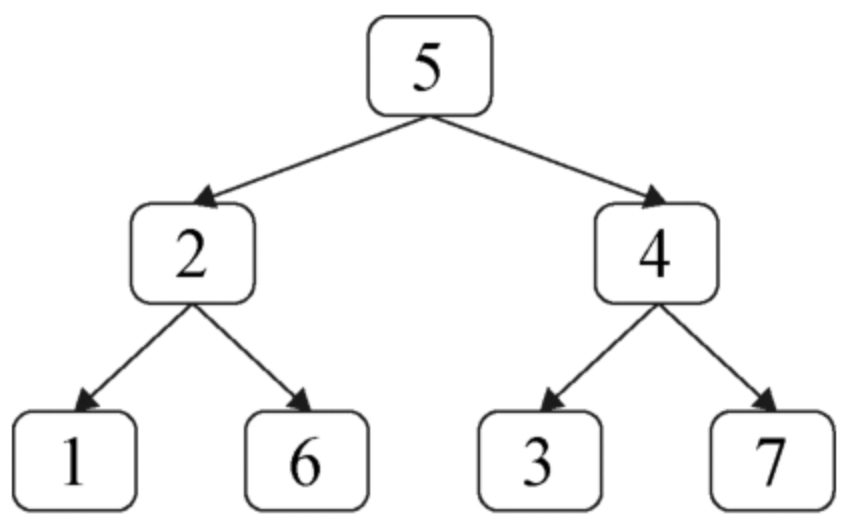
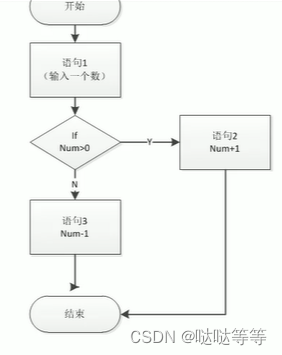
题目 给定一棵二叉树和一个值sum,求二叉树中节点值之和等于sum的路径的数目。路径的定义为二叉树中顺着指向子节点的指针向下移动所经过的节点,但不一定从根节点开始,也不一定到叶节点结束。例如,在如图8.5所示中的二叉树中有两条…...
dbeaver查看表,解决证书报错current license is non-compliant for [jdbc]
http://localhost:9200/_license { “license” : { “status” : “active”, “uid” : “b91ae0e0-b04d-4e20-8730-cf0bca7b2035”, “type” : “basic”, “issue_date” : “2023-02-22T14:33:27.648Z”, “issue_date_in_millis” : 1677076407648, “max_nodes” : 10…...
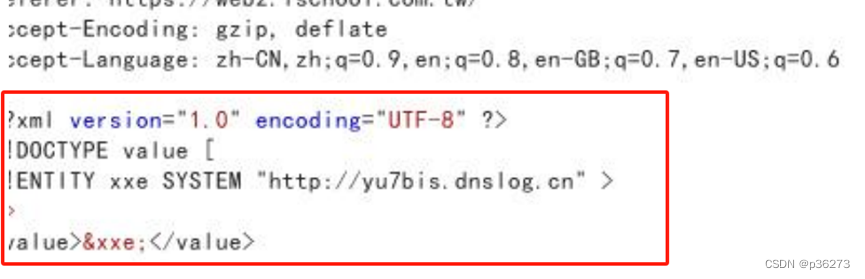
网络安全进阶学习第二十一课——XXE
文章目录 一、XXE简介二、XXE原理三、XXE危害四、XXE如何寻找五、XXE限制条件六、XXE分类七、XXE利用1、读取任意文件1.1、有回显1.2、没有回显 2、命令执行(情况相对较少见)3、内网探测/SSRF4、拒绝服务攻击(DDoS)4.1、内部实体4.2、参数实体 八、绕过基…...
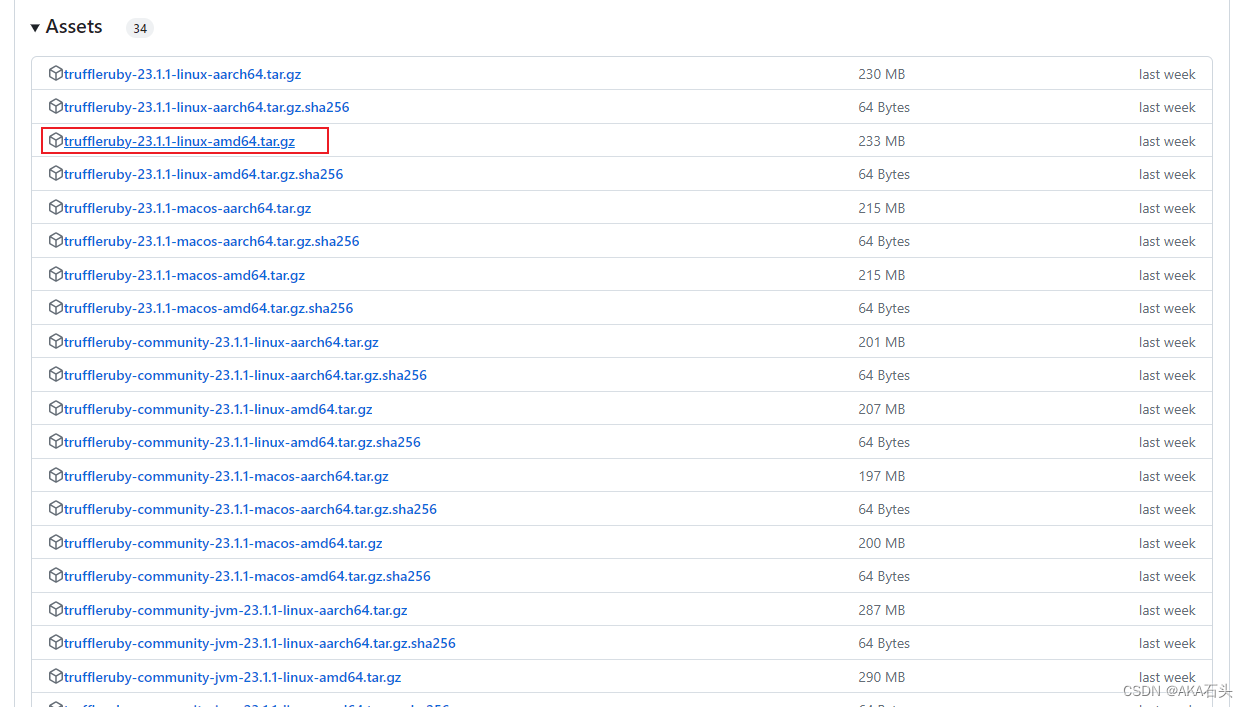
如何将 ruby 打包类似于jdk在另一台相同架构的机器上面开箱即用
需求 目前工作中使用到了ruby作为java 项目的中转语言,但是部署ruby的时候由于环境的不同会出现安装依赖包失败的问题,如何找到一种开箱即用的方式类似于java 中的jdk内置jvm这种方式 解决 TruffleRuby 完美解决问题,TruffleRuby 是使用 T…...
vue封装独立组件:实现分格密码输入框/验证码输入框
目录 第一章 实现效果 第二章 核心实现思路 第三章 封装组件代码实现 第一章 实现效果 为了方便小编的父组件随便找了个页面演示的通过点击按钮,展示子组件密码输入的输入框通过点击子组件输入框获取焦点,然后输入验证码数字即可子组件的确定按钮是验…...

从2D圆形到3D椭圆
要将一个2D圆形转换成3D椭圆,我们需要使用CSS的transform属性和一些基本的几何知识。首先,让我们创建一个HTML元素,如下所 html <div class"circle"></div> 然后,使用CSS样式将其转换成3D椭圆 css .circ…...
Linux CentOS7.9安装OpenJDK17
Linux CentOS7.9安装OpenJDK17 一、OpenJDK下载 清华大学开源软件镜像站 国内的站点,下载速度贼快 二、上传解压 文件上传到服务器后,解压命令: tar -zxvf jdk-xxxx-linux-x64.tar.gz三、配置环境 export JAVA_HOME/home/local/java/j…...
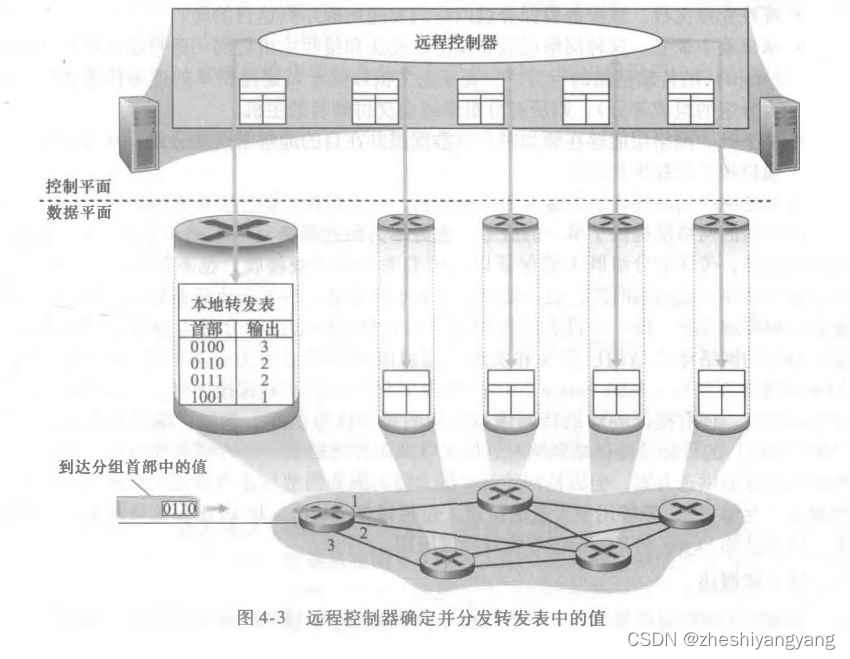
计算机网络第4章-网络层(1)
引子 网络层能够被分解为两个相互作用的部分: 数据平面和控制平面。 网络层概述 路由器具有截断的协议栈,即没有网络层以上的部分。 如下图所示,是一个简单网络: 转发和路由选择:数据平面和控制平面 网络层的作用…...
单元测试学习
回顾测试理论基础 单元测试基础知识 什么是单元测试 单元测试流程、测试计划 测试策略设计、实现 单元测试 - 执行 HTML 报告生成 1 软件测试分类 目标 回顾测试理论知识-测试分类 1. 测 试分类 代码可见度上-划分分类: 1. 黑盒测试 2. 灰盒测试 3. …...

python编写接口测试文档(以豆瓣搜索为例)
📢专注于分享软件测试干货内容,欢迎点赞 👍 收藏 ⭐留言 📝 如有错误敬请指正!📢交流讨论:欢迎加入我们一起学习!📢资源分享:耗时200小时精选的「软件测试」资…...

C++查看Class类结构
cl指令 cl test.cpp /d1reportSingleClassLayout 类名 注意。上面指令是d1,1是数字1 , 不是字母l;...
appium如何连接多台设备
我们在做app自动化的时候,若要考虑兼容性问题,需要跑几台设备,要是一台一台的跑比较耗时,因此需要考虑使用多线程来同时操作多台设备。 1.我们拿两台设备来模拟操作下,使用:adb devices查看连接状况&#…...

VUE el-form组件不绑定model时进行校验
在el-form中如果要使用:rules规则校验时,需要在el-form标签绑定 :model 如何不绑定model而进行校验字段: 思路: 1.假设规则为非空判断 2.获取该字段,进行非空判断,记录该字段是否校验完成,添加到校验标识中 3.表单或数据提交时,判断校验标识 required 红星星 :error 提示项 …...

计算机视觉的监督学习与无监督学习
什么是监督学习? 监督学习是一种机器学习算法,它从一组已标记的 合成数据生成器中生成的训练数据中学习。这意味着数据科学家已经用正确的标签(例如,“猫”或“狗”)标记了训练集中的每个数据点,以便算法可…...

Linux-lvds接口
lvds接口 单6 单8 双6 双8...

Android 自定义View一
1.继承已有VIew,改写尺寸:重写onMeasure SquareImageView 2.完全自定义重写onMeasure 3.自定义Layout 重写onMeasure onLayout 1.继承已有VIew,改写尺寸:重写onMeasure 流程: 重写onMeasure 用getmeasureedWidth …...
11、电路综合-集总参数电路结构的S参数模型计算与Matlab
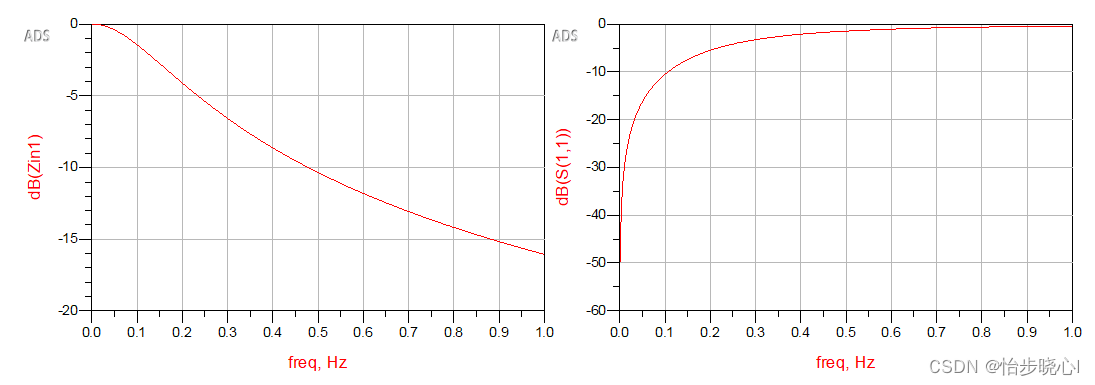
11、电路综合-集总参数电路结构的S参数模型 电路综合专栏的大纲如下: 网络综合和简化实频理论学习概述 前面介绍了许多微带线电路综合的实际案例,如: 3、电路综合原理与实践—单双端口理想微带线(伪)手算S参数与时域…...

Spring Boot Actuator生产级监控与管理工具包
Spring Boot Actuator 是 Spring Boot 提供的生产级监控与管理工具包,帮你把应用“可观测化”。它提供了一系列内置的端点(Endpoint),用来查看应用的内部状态,比如健康情况、配置信息、内存指标等。你可以把它理解成为…...

Modules功能模块体系
Modules 功能模块体系 位置:Source/Modules 每个模块通常包含: Extension.cs / Extention.cs 注册入口 Options.cs 配置选项 Presenter.xaml UI 展示器 Themes/Generic.xaml 默认样式 Resources.*.resx …...

龙芯LS2K PMON启动全解析:从内核到U盘识别的奥秘
【龙芯LS2K PMON终极干货】整机设备启动全景图:从 mainbus 开机到 U 盘识别全流程 一、整篇总纲(最强一句话) 内核启动 → 读 ioconf.c/cfdata 硬件族谱 → 从根总线 mainbus 开始遍历 → 逐级 attach 设备 → 启动 PCI → 扫描到 OTG 控制器 → 加载 dwc2 驱动 → 开启 U…...

WTEW的操作记录
WTEW的操作记录WTEW事务代码的操作记录WTEW事务代码的操作记录 1、查询贸易合同信息 如果是自己创建可以使用WB21、WB22、WB23事务码,如果是税码更新用WBRP更新价格 2、创建后续单据,采购TC创建采购订单,销售TC创建销售订单,注…...

时序分析核心概念与实战:从数据特征到数据库选型
1. 项目概述:为什么我们需要“时序分析”?如果你在金融、物联网、工业制造、运维监控或者电商数据分析等领域工作过,那么“时序数据”这个词对你来说一定不陌生。简单来说,时序数据就是一系列按时间顺序排列的数据点。听起来很简单…...

技术债的“利息”怎么算?一个让非技术领导也能理解的比喻
一、从“信用卡账单”到“技术债利息”:一个通俗的起点软件测试从业者对“技术债”这个词绝不陌生,每次面对历史代码里的“隐秘角落”,看着新功能开发时层出不穷的连锁Bug,我们都能直观感受到技术债带来的拖累。但要向非技术领导解…...
)
大模型时代,软件开发行业的新玩法(2026 深度复盘)
摘要 2026 年,大模型已从 “辅助工具” 进化为软件开发的核心生产引擎,彻底重构需求、设计、编码、测试、运维全链路逻辑。传统 “人写代码” 的模式被颠覆,人机共生、AI 主导执行、人类决策审核成为行业新常态。本文结合最新行业实践、数据案…...

FastAdmin旧版本CVE-2024-7928任意文件读取漏洞实战修复指南
1. 这个漏洞不是“能读任意文件”那么简单,而是整个权限体系的崩塌起点FastAdmin 是国内 PHP 后台开发领域使用率极高的开源框架,尤其在中小型企业定制化管理后台、政企内部系统、电商中台等场景中,大量项目仍基于 v1.3.x ~ v1.4.5 版本运行。…...

AI Agent Harness Engineering 技术选型指南:根据场景选择合适的大模型与框架
AI Agent Harness Engineering 技术选型指南:根据场景选择合适的大模型与框架 引言 痛点引入 你是否遇到过这样的场景?产品经理拍板要做一个**“能帮企业HR自动筛选简历、邀约面试、生成入职指南并跟进试用期转正材料”**的“超级HR助手”AI Agent——…...

38 - Go 命令行参数处理:从 os.Args 到 flag 的底层设计
文章目录38 - Go 命令行参数处理:从 os.Args 到 flag 的底层设计为什么需要命令行参数?命令行参数的本质最基础的参数处理:os.Args基础使用示例获取单个参数flag 标准库:Go 官方参数解析器最简单的 flag 示例为什么 flag.String 返…...