kaggle使用说明
kaggle
- kaggle使用参考
- 1、kaggle目录
- 2、kaggle上传本地文件后,如何不改代码就可运行
- 3、已上传文件的修改
- 3.1 重新上传
- 3.2 重写文件
- 4、创建文件夹
- 5、结果下载
- 5.1 多文件:先打包再下载
- 5.2 重定文件下载链接
kaggle使用参考
Kaggle 新手入门必看,手把手教学
Kaggle服务器初体验记录
1、kaggle目录
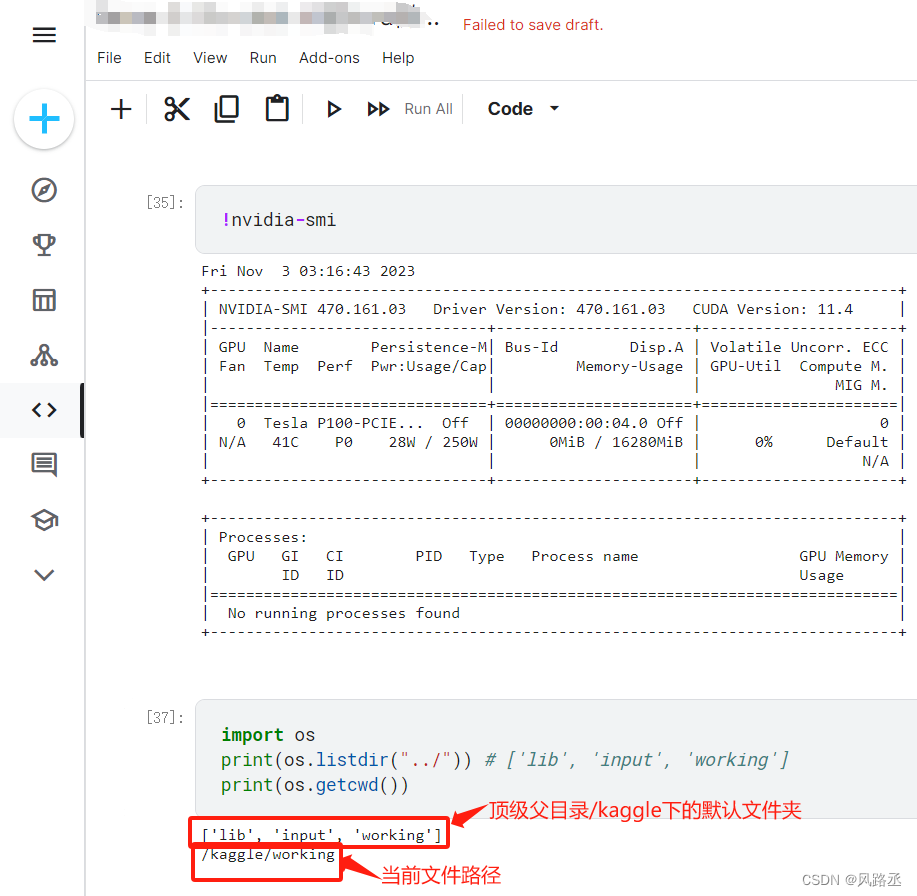
1、所有文件的顶级父目录是【/kaggle】
2、新建的notebook文件的路径默认是 【/kaggle/working】,所以在当前notebook中执行 "cd …/"即回退到顶级父目录/kaggle了。
3、/kaggle下默认已存在的3个文件夹:lib、input、working。
2、kaggle上传本地文件后,如何不改代码就可运行
问题:kaggle上次的本地文件默认是在/kaggle/input 下,但kaggle默认的工作目录是/kaggle/working,所以要怎么把前者文件转移到后者下呢?
解决:参考以上参考文档,需要复制或移动文件。可以在新打开的jupyter notebook中,执行以下命令:
方案一:cp复制
!cp -rf ../input/xx.py ./
方案二:%%writefile xx.py复制
在新cell的头部先写上%%writefile xx.py,然后再同个cell内换行后追加要写入到xx.py中的内容。运行这个 cell,/kaggle/working目录下就会出现 xx.py 文件。
3、已上传文件的修改
已上传的文件是无法直接编辑的,可以通过以下途径“曲线修改”。
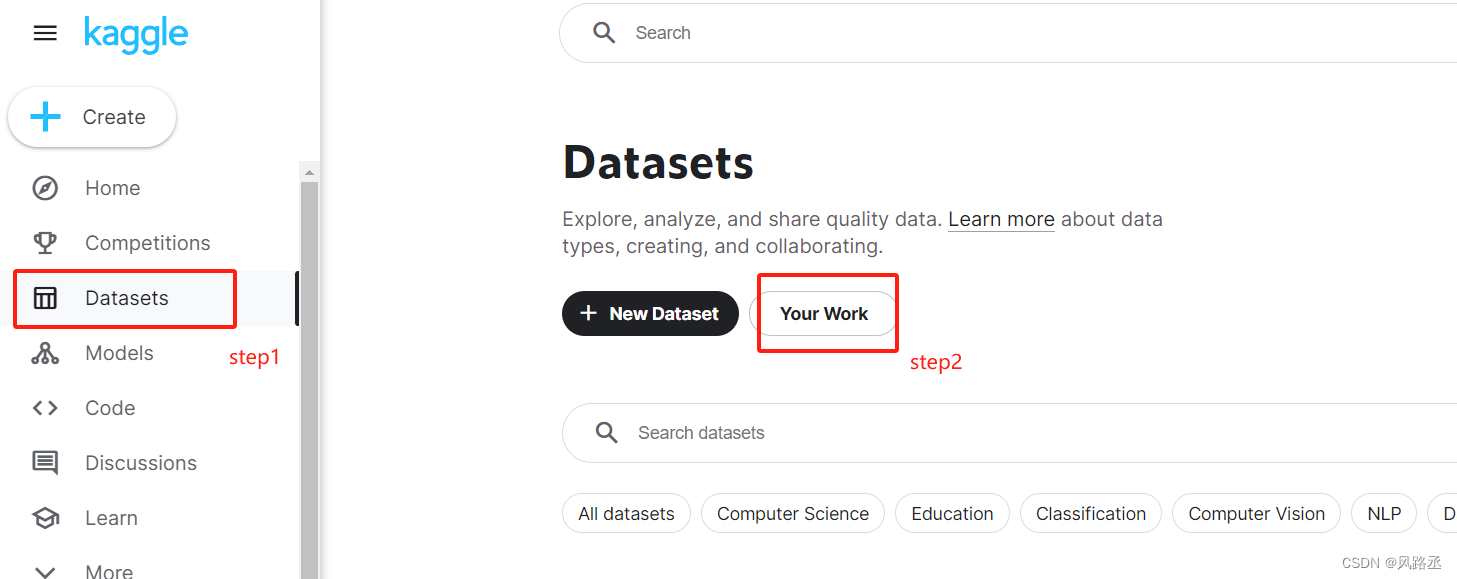
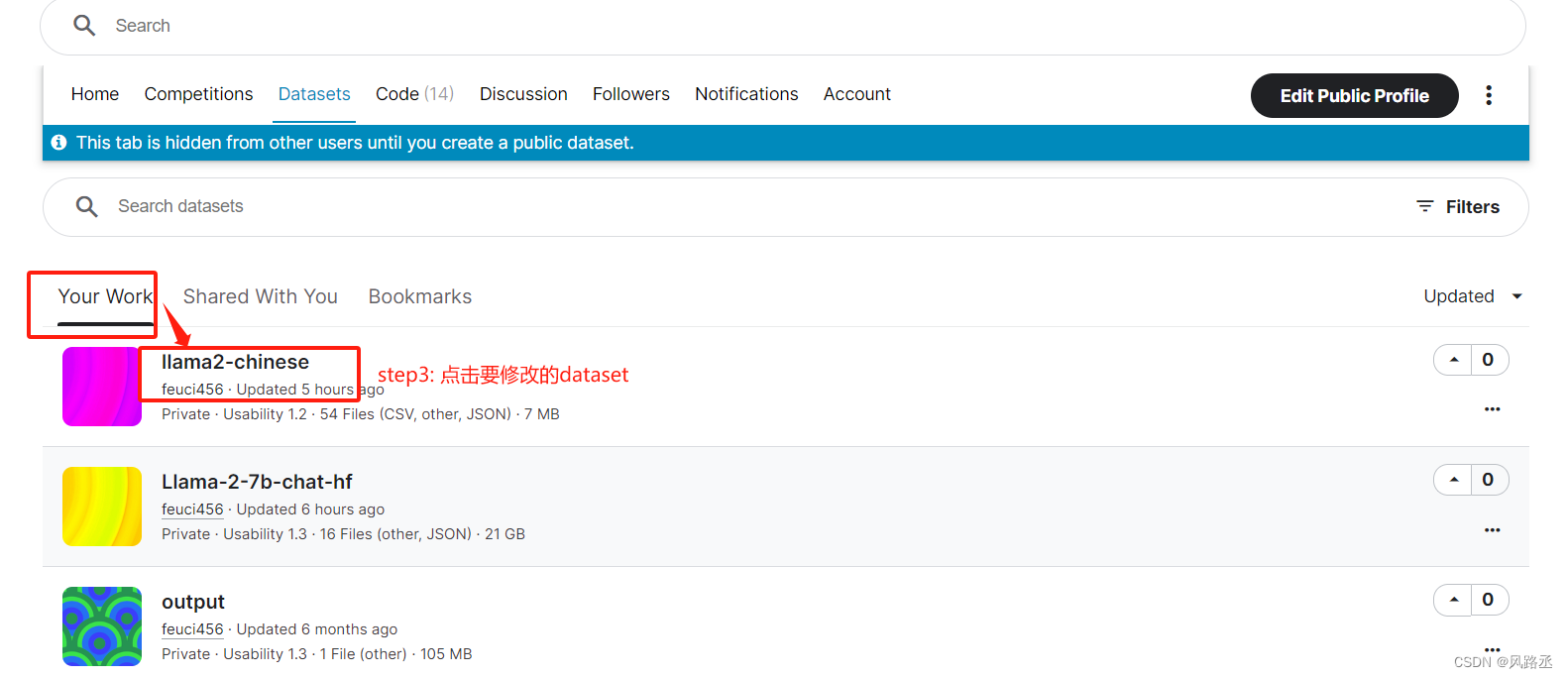
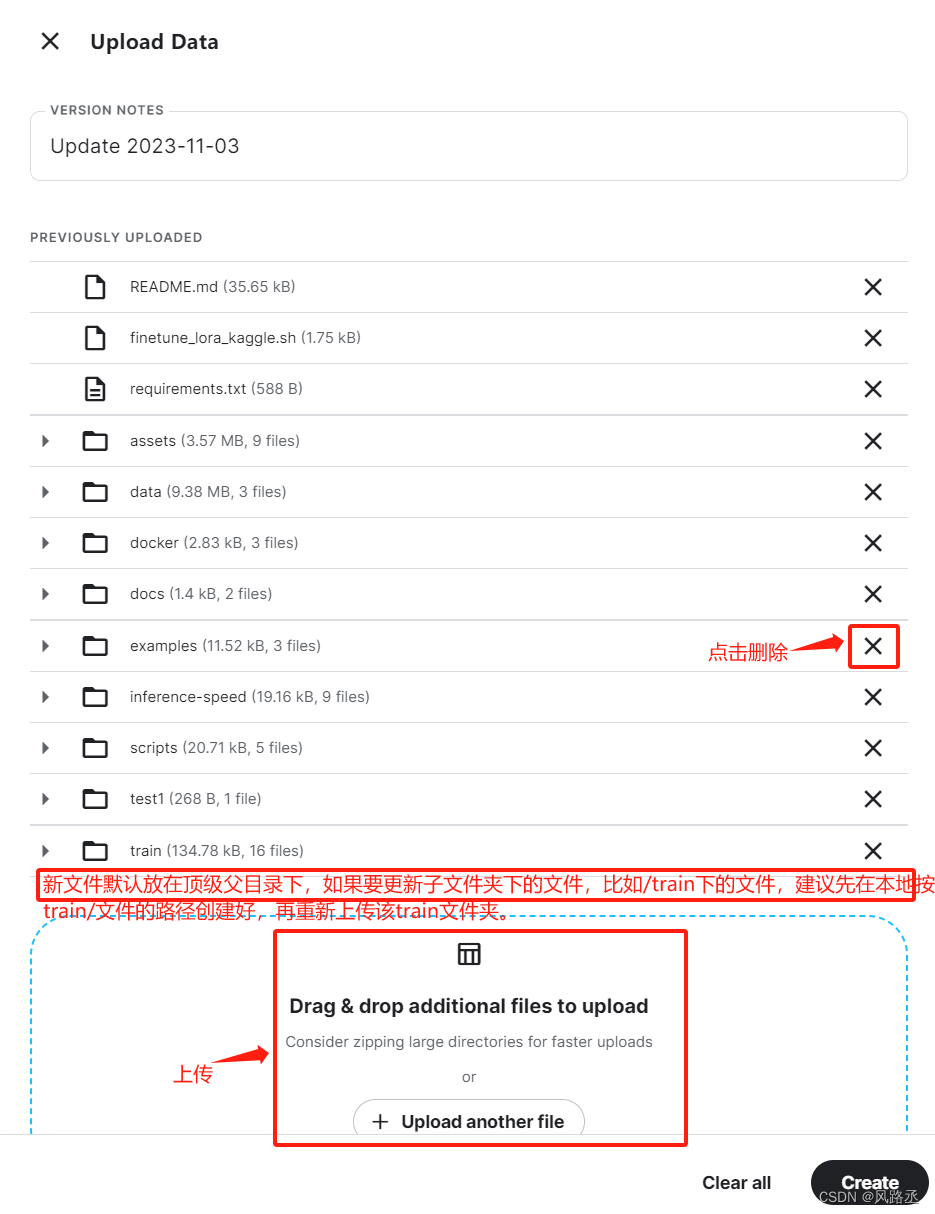
3.1 重新上传
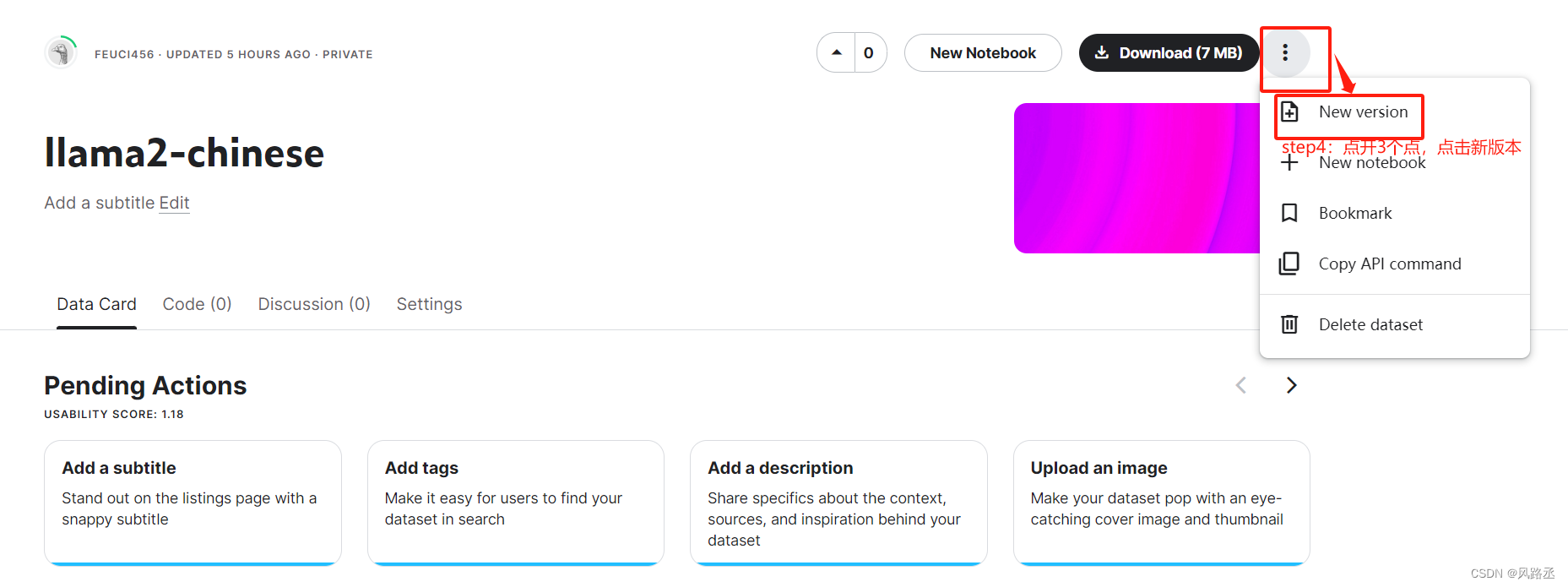
New version打开的界面:
3.2 重写文件
前提:文件已经在/kaggle/working目录下
4、创建文件夹
自己创建文件夹到目录 /kaggle/working/ 下:
方案一:
!mkdir 文件夹
方案二:
import os
os.mkdir("文件夹")

5、结果下载
5.1 多文件:先打包再下载
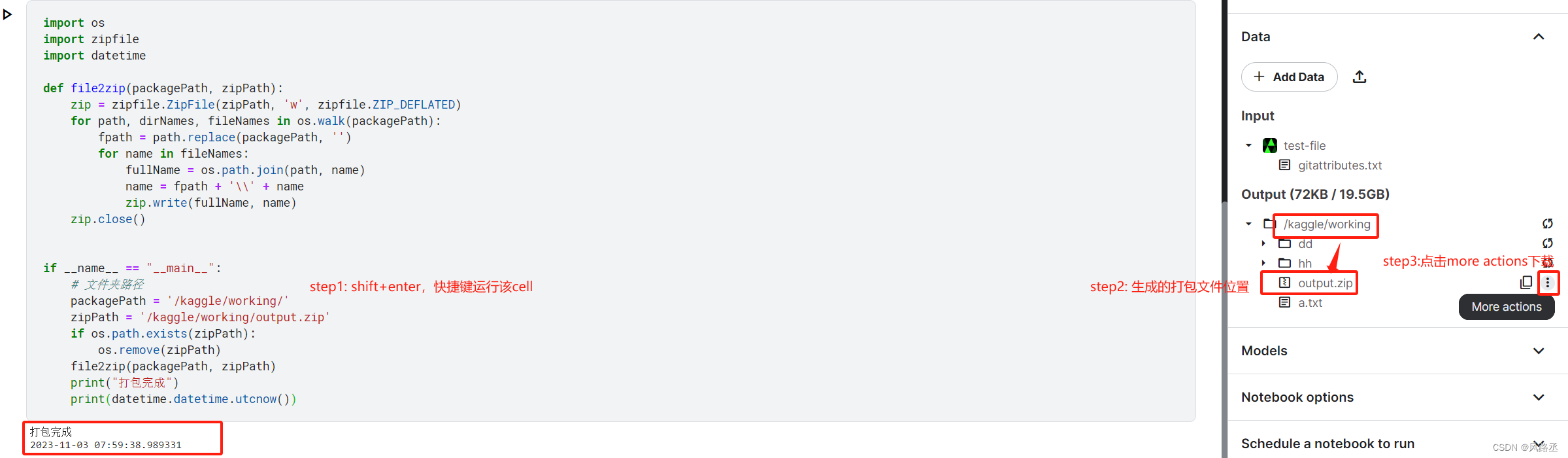
结果存储的文件(/kaggle/working/目录下),只可以单个文件下载,如果文件比较多,可以压缩一下打包,打包后的文件会出现在/kaggle/working目录下,直接下载这个压缩包即可。
import os
import zipfile
import datetimedef file2zip(packagePath, zipPath):zip = zipfile.ZipFile(zipPath, 'w', zipfile.ZIP_DEFLATED)for path, dirNames, fileNames in os.walk(packagePath):fpath = path.replace(packagePath, '')for name in fileNames:fullName = os.path.join(path, name)name = fpath + '\\' + namezip.write(fullName, name)zip.close()if __name__ == "__main__":# 文件夹路径packagePath = '/kaggle/working/'zipPath = '/kaggle/working/output.zip'if os.path.exists(zipPath):os.remove(zipPath)file2zip(packagePath, zipPath)print("打包完成")print(datetime.datetime.utcnow())
5.2 重定文件下载链接
如果使用Kaggle平台训练自己的模型,训练结束之后由于模型过大导致output那里一直在加载(转圈),即使加载出来点击download也没有反应,可以使用以下代码重新生成文件链接:
from IPython.display import FileLink
FileLink('output.zip')

相关文章:
kaggle使用说明
kaggle kaggle使用参考1、kaggle目录2、kaggle上传本地文件后,如何不改代码就可运行3、已上传文件的修改3.1 重新上传3.2 重写文件 4、创建文件夹5、结果下载5.1 多文件:先打包再下载5.2 重定文件下载链接 kaggle使用参考 Kaggle 新手入门必看ÿ…...

BUUCTF FLAG 1
BUUCTF:https://buuoj.cn/challenges 题目描述: 注意:请将 hctf 替换为 flag 提交,格式 flag{} 密文: 下载附件,得到一张.png图片。 解题思路: 1、因为附件是一张图片,先放到StegSolve中&…...
万物皆可“云” 从杭州云栖大会看数智生活的未来
文章目录 前言一、云栖渐进:一个科技论坛的变迁与互联网历史互联网创新创业飞天进化飞天智能驱动数字中国 二、2023云栖大会:云计算人工智能 玩出科技跨界新花样大会亮点重磅嘉宾热门展览算力馆人工智能馆产业创新馆 总结 前言 10月31日,202…...
LeetCode1518 换水问题
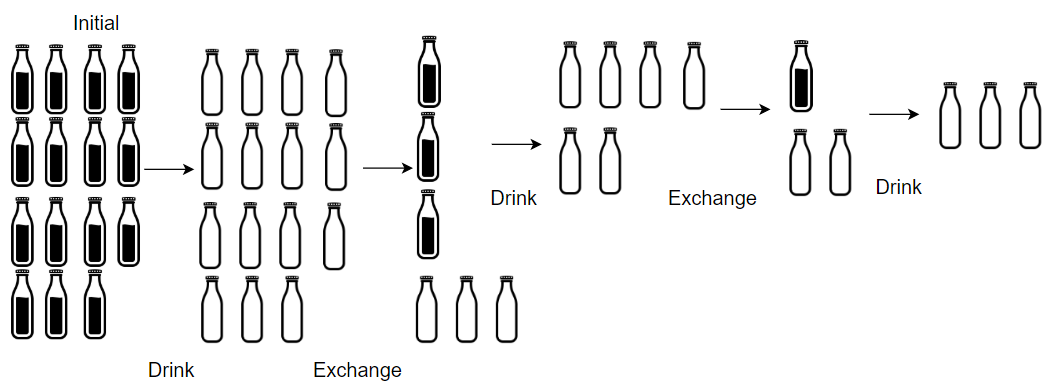
题目描述 超市正在促销,你可以用 numExchange 个空水瓶从超市兑换一瓶水。最开始,你一共购入了 numBottles 瓶水。 如果喝掉了水瓶中的水,那么水瓶就会变成空的。 给你两个整数 numBottles 和 numExchange ,返回你 最多 可以喝…...
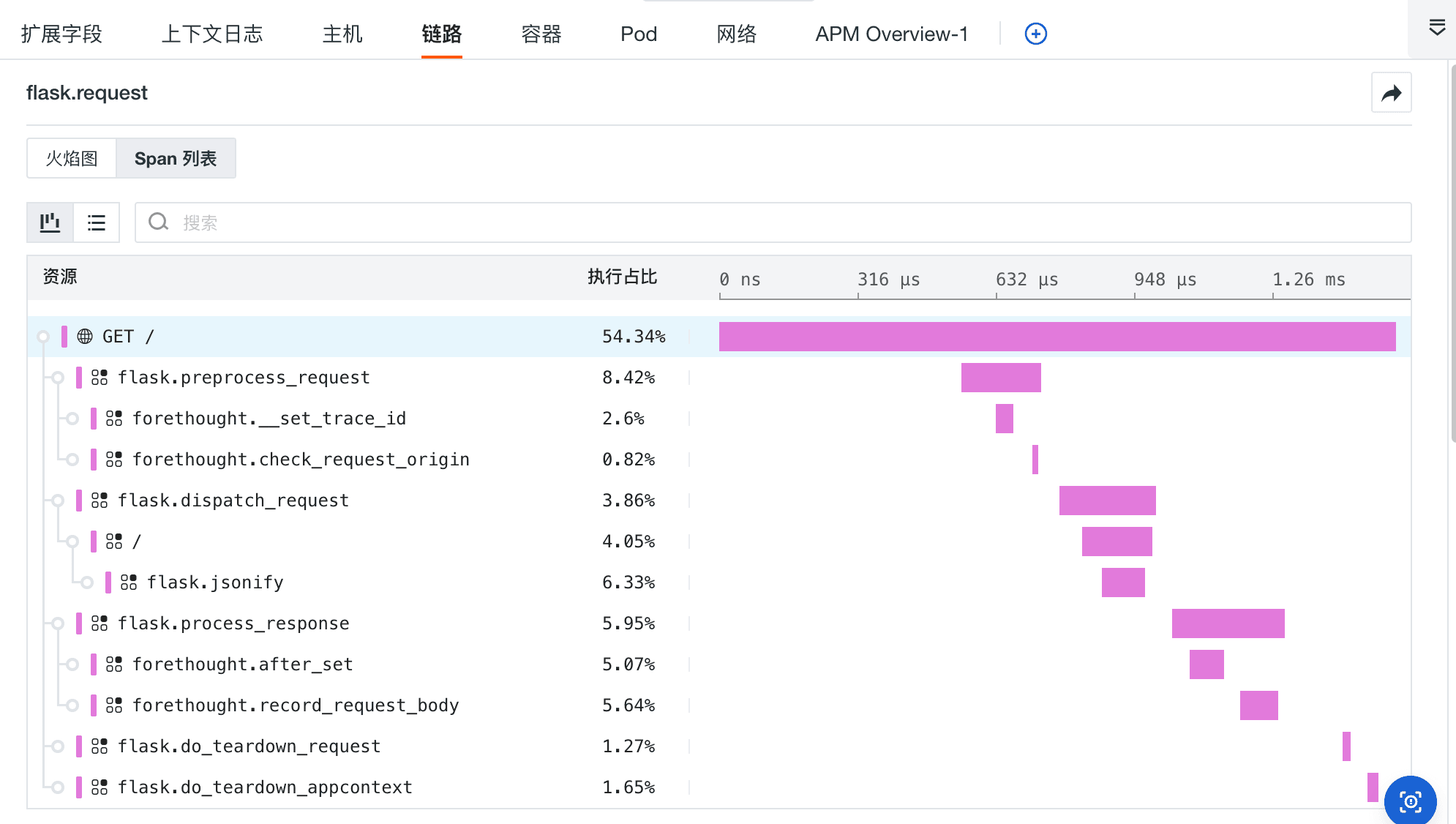
强大日志查看器,助力数据联动分析
前言 我们曾讨论过观测云查看器强大的查询筛选和搜索功能,能够帮助用户快速、精准地检索数据,定位故障问题(参见《如何使用查看器筛选、搜索功能进行数据定位?》)。除此之外,日志查看器不仅可以帮助我们收…...

HIBS一些简介
文章目录 距离发展:意义使用挑战安全IOT活动服务频带可行性频谱 距离 海拔约20KM的平流层中,国际电联无线电条例(RR)将HAPS定义为位于20-50公里高度和相对于地球的指定标称固定点的物体上的无线电台。 #高空平台作为IMT基站(HIB…...
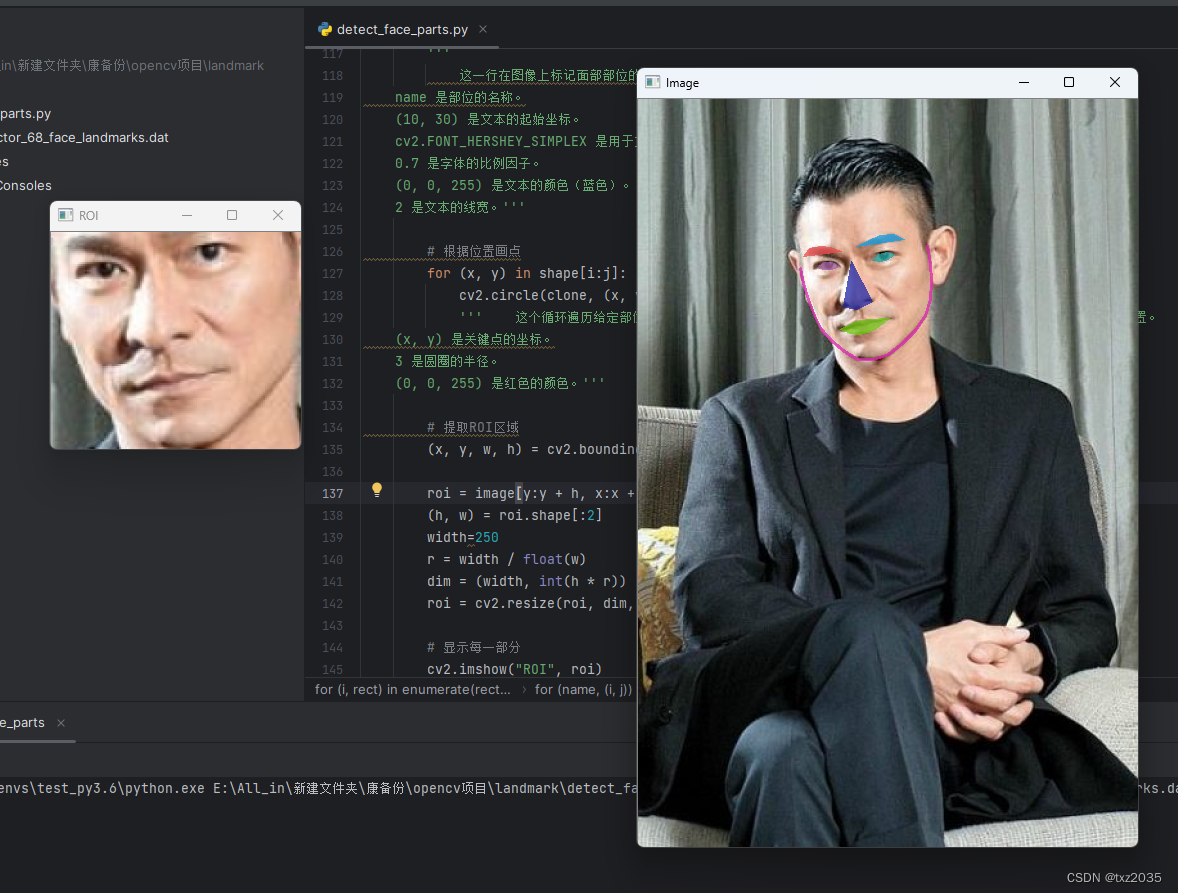
OpenCV实现人脸关键点检测
目录 实现过程 1,代码解读 1.1 导入工具包 1.2导入所需图像,以及训练好的人脸预测模型 1.3 将 dlib 的关键点对象转换为 NumPy 数组,以便后续处理 1.4图像上可视化面部关键点 1.5# 读取输入数据,预处理 1.6进行人脸检测 1…...
300万美元!澳大利亚昆士兰州投资当地首家量子公司AQC
澳大利亚模拟量子电路公司(AQC)联合创始人 Tom Stace 教授和 Arkady Federov 副教授(图片来源:网络) 澳大利亚风险投资基金会Uniseed为澳大利亚昆士兰大学的两名教授提供了300万美元的资金,资助他们创办了…...
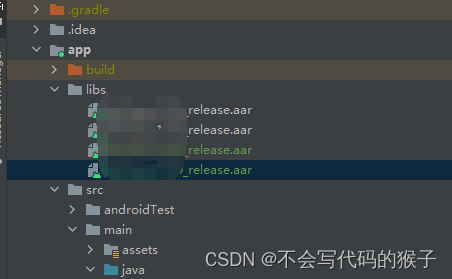
Android Studio打包AAR
注意 依赖的Android Studio版本为4.2.2 更高的Android Studio版本使用方法可能有所不同,gradle的版本和gradle plugins的版本都会影响使用方式。 基于此,本文只能作为参考,而不能作为唯一答案,如果要完全依赖本文,则…...

【Python基础知识四】控制语句
Python基础知识:控制语句 1 条件控制1.1 if语句1.2 match...case语句 2 循环语句2.1 for循环2.2 for...else语句2.3 while循环2.4 while 循环使用 else 语句2.5 无限循环2.6 break 和 continue 语句及循环中的 else 子句2.6.1 break语句2.6.2 continue语句 2.7 pass…...

Jmeter压测 —— 1秒发送1次请求
场景:有时候测试场景需要设置请求频率为一秒一次(或几秒一次)实现方法一:1、首先需要在线程组下设置循环次数(可以理解为请求的次数) 次数设置为请求300次,其中线程数跟时间自行设置 2、在设置…...

目标检测YOLO实战应用案例100讲-基于改进YOLOv4算法的自动驾驶场景 目标检测
目录 前言 国内外目标检测算法研究现状 传统目标检测算法的发展现状...
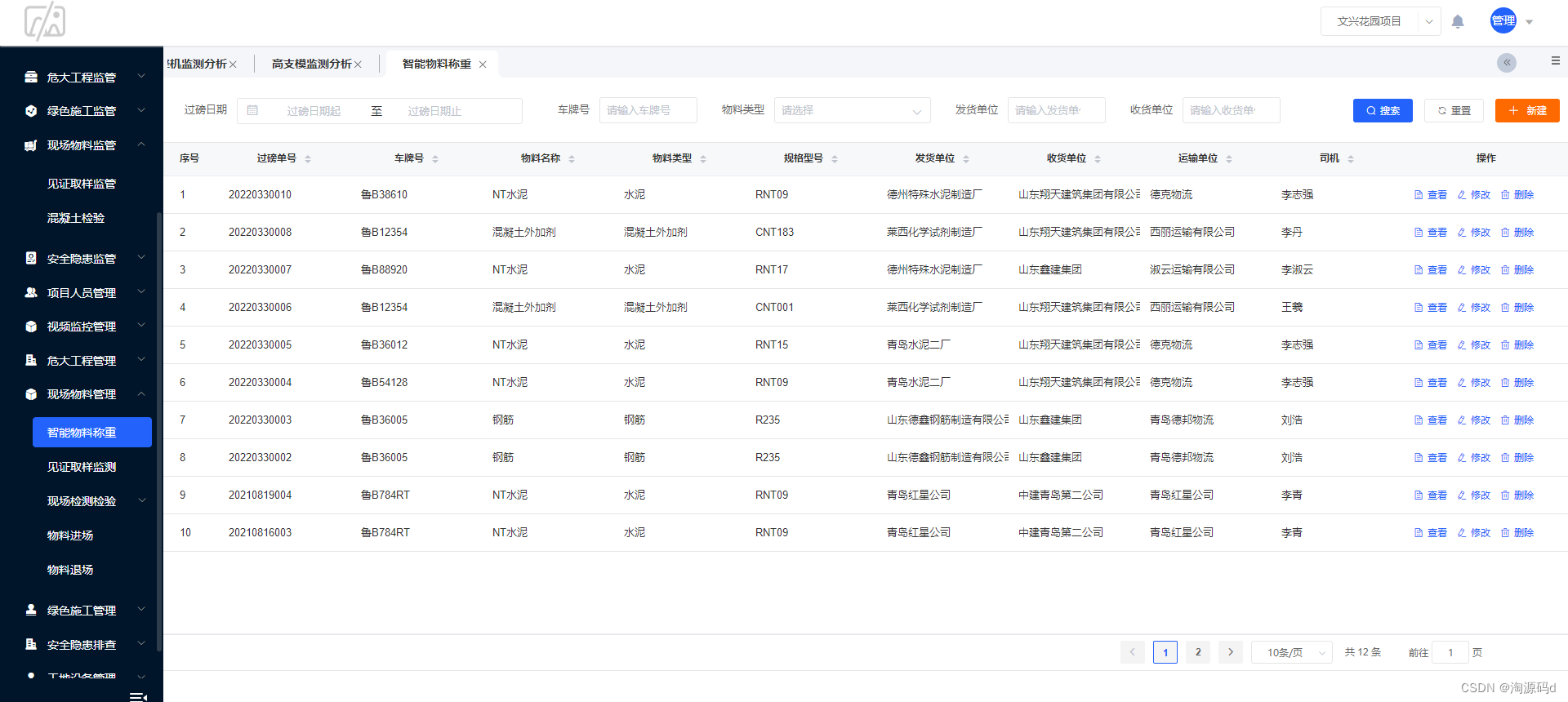
Spring Cloud智慧工地源码,利用计算机技术、互联网、物联网、云计算、大数据等新一代信息技术开发,微服务架构
智慧工地系统充分利用计算机技术、互联网、物联网、云计算、大数据等新一代信息技术,以PC端,移动端,设备端三位一体的管控方式为企业现场工程管理提供了先进的技术手段。让劳务、设备、物料、安全、环境、能源、资料、计划、质量、视频监控等…...
AI视频 | Runway的史诗级更新真的那么震撼吗?来看我的试用体验!
就在昨天,Runway,这个生成式AI的领头羊,正式在X上发布了他们史诗级更新 看下视频 【视频2】 这个确实看起来太棒了 注册个账号,看下效果咋样 地址百度哈,注册登录也比较方便 直接邮箱即可 不过我是直接google账号登录的…...
)
【动作模式识别】实现复合动作模式识别(离线控制模块)
一、思路 一般来说,要实现摸脸动作,需要采集手臂的以下肌肉的肌电信号: 肱二头肌:控制肘关节的屈曲肱三头肌:控制肘关节的伸展前臂屈肌群:控制手腕和手指的屈曲前臂伸肌群:控制手腕和手指的伸…...

Python基础学习009——类的封装
# 面向对象是一种编程思想,还有另一种是面向过程 # 面向过程,具体步骤的实现,所有功能都自己书写 # 面向对象,使用一个个工具(函数),帮助完成各项任务 # 类:对多个特性相同或相似的食物的统称,根据特征不同一个事物可以属于多个类 # 对象:由类实例化的一个事物,指代1个 # 类的组…...

前端开发和后端开发,你更倾向于哪一种?
作为一个Web开发者,你是否曾经面临过这样的选择:是专注于前端开发,还是转向后端开发?前端开发和后端开发是Web开发中的两个不同的领域,它们各有各的特点和优势,也各有各的挑战和难点。那么,你应…...

Selenium 基本功能
#driver.quit()from selenium import webdriver from selenium.webdriver.chrome.service import Service# 尝试传参 s Service("chromedriver.exe") driver webdriver.Chrome(services)driver.get(https://www.baidu.com/) input()#1/导入Selenium库 from seleniu…...
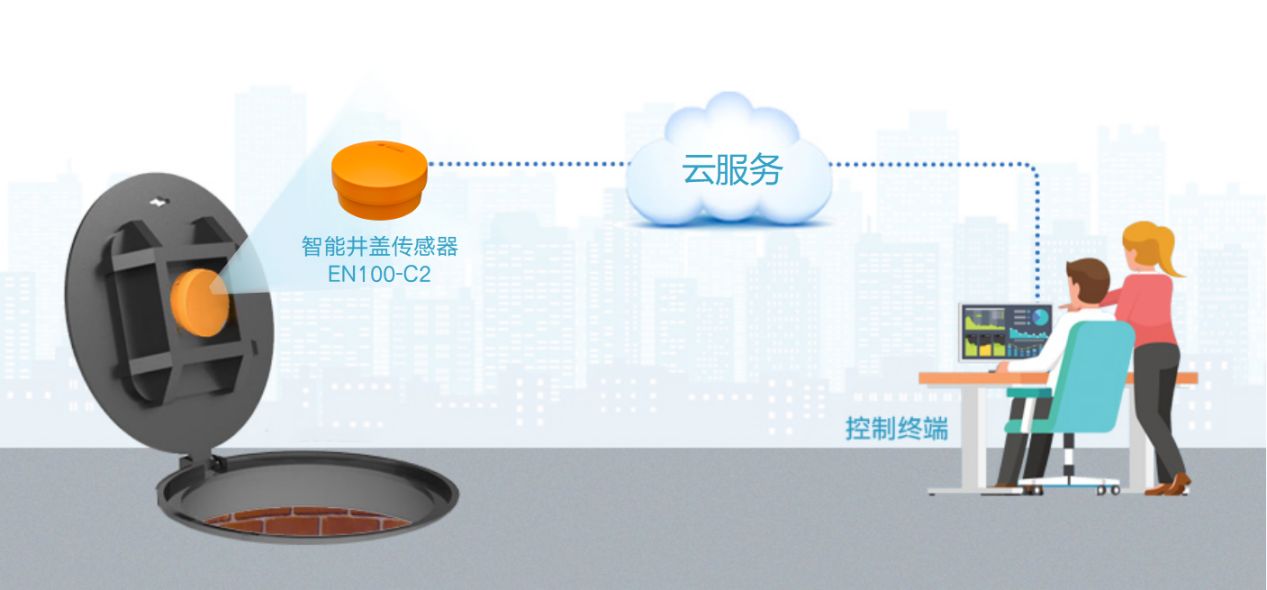
智能井盖传感器有哪些?万宾科技智能井盖效果
在城市治理过程之中,小小的井盖却成为影响民生的一个重要方面,因为井盖一旦出现问题,会严重影响市民的生命安全,并且传统的井盖一般都会采用人工巡检的方式,这就导致了巡检的难度较大,从而不能对城市各个角…...
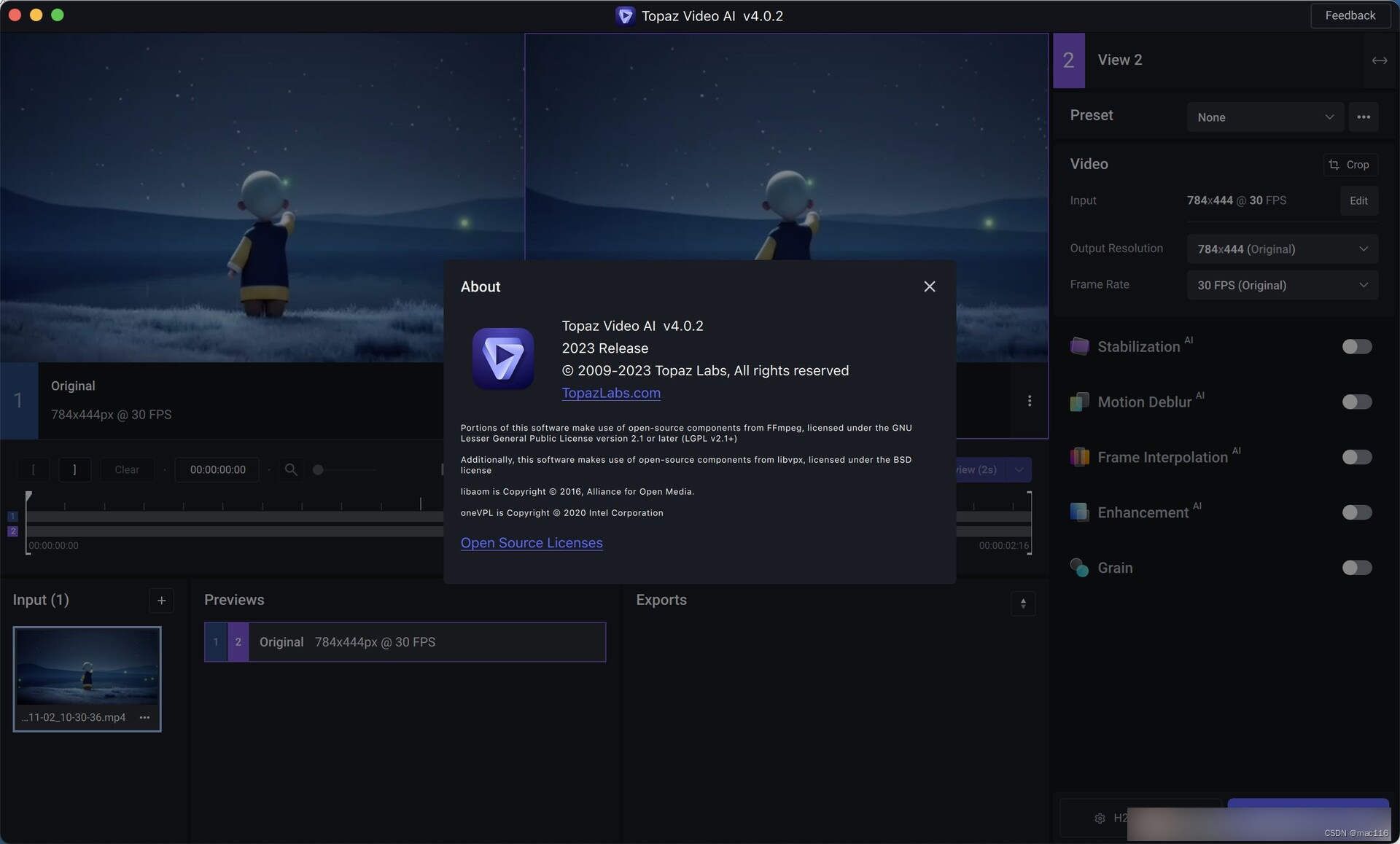
视频增强和修复工具 Topaz Video AI mac中文版功能
Topaz Video AI mac是一款使用人工智能技术对视频进行增强和修复的软件。它可以自动降噪、去除锐化、减少压缩失真、提高清晰度等等。Topaz Video AI可以处理各种类型的视频,包括低分辨率视频、老旧影片、手机录制的视频等。 使用Topaz Video AI非常简单,…...

tinySPL 与 U-Boot 核心区别
tinySPL 与 U-Boot 核心区别 一、定位本质项目tinySPLU-Boot定位轻量极简二级引导,专为RTOS/裸机设计通用全能大型Bootloader,主打Linux系统体积极小,几十KB级别大,几百KB~数MB设计目标极速启动、轻量化、适配嵌入式轻系统功能最全…...

2026 年 30 个 MCP Server 实测评:Claude Code 集成效果与响应延迟对比数据
1. 30个MCP Server实测评背后的真实问题:Claude Code不是“插上就快”,而是“配错就崩” 我上线第三个内部MCP Server时,CI流水线里一个原本2秒完成的代码补全请求,突然卡在waiting for MCP response状态长达17秒。日志里没有报错,只有反复重试的HTTP 504。排查了两天,最…...

别再傻傻分不清!PECL、CML、LVDS三种高速差分接口,硬件工程师选型避坑指南
高速差分接口选型实战:PECL、CML、LVDS的工程化决策指南 当PCB布线密度突破8层板、信号速率迈入Gbps时代,差分接口的选择直接决定系统稳定性。某通信设备厂商曾因误用LVPECL接口导致整批产品EMC测试失败,损失超百万——这类故事在硬件圈屡见不…...

从地图导航到推荐系统:欧式距离在真实业务场景中的Python应用避坑指南
从地图导航到推荐系统:欧式距离在真实业务场景中的Python应用避坑指南 当你在外卖App上查看"3公里内的餐厅",或在电商平台看到"相似用户还买了"的推荐时,背后可能都在使用同一个数学工具——欧式距离。这个看似简单的距离…...

三星固件下载器Bifrost:三分钟掌握跨平台官方固件获取指南
三星固件下载器Bifrost:三分钟掌握跨平台官方固件获取指南 【免费下载链接】Bifrost Cross-platform tool for downloading Samsung mobile device firmware. 项目地址: https://gitcode.com/gh_mirrors/sa/Bifrost 还在为三星设备找不到官方固件而烦恼吗&am…...

从FM收音机到5G基站:拆解DDS技术如何悄悄改变我们的通信设备
从FM收音机到5G基站:拆解DDS技术如何悄悄改变我们的通信设备 上世纪90年代,当人们第一次在车载收音机上按下"自动搜台"按钮时,很少有人意识到这个流畅体验背后隐藏着一项革命性技术——直接数字频率合成(DDS)…...

开发小记-开发中的小随笔
1. josn字符串转换 JSON.stringify(data) 直接这样转,会是一整行的字符串。 JSON.stringify(data, null, 2); 这样转就会转成格式化的换行的标准json字符串,方便展示diff 2. 毫秒时间戳转换 需要将字符串‘2025-04-01’转换为整型时间戳,…...

PyTorch 自动混合精度库背后的谜团
原文:towardsdatascience.com/the-mystery-behind-the-pytorch-automatic-mixed-precision-library-d9386e4b787e?sourcecollection_archive---------4-----------------------#2024-09-17 如何通过三行代码实现 2 倍速度提升的模型训练 https://mengliuz.medium.…...

2026四大主流收银系统深度横评:商拓、柚子、商琦云与银阁仕实战对比
在零售和餐饮行业数字化转型的浪潮中,收银系统早已超越了简单的“算账工具”范畴,成为了门店运营的中枢神经。很多店主在选型时容易陷入一个误区:只盯着硬件价格或者界面好不好看,却忽略了系统在高峰期的稳定性、数据链路的打通能…...

causal-learn实战指南:从算法选择到因果图解读
1. 为什么你需要causal-learn? 第一次接触因果发现这个概念时,我正被一个电商用户行为分析项目搞得焦头烂额。传统机器学习模型能准确预测用户是否会购买商品,但产品经理总追着我问:"到底哪些因素真正导致了购买行为…...