基于单片机设计的太阳能跟踪器
一、前言
随着对可再生能源的需求不断增长,太阳能作为一种清洁、可持续的能源形式,受到越来越多的关注和应用。太阳能光板通常固定在一个固定的角度上,这限制了它们对太阳光的接收效率。为了充分利用太阳能资源,提高太阳能光板的收集效率,需要设计一个能够自动跟踪太阳光的系统。
本项目采用基于单片机的设计方案,主控芯片选择STC89C52。在太阳能光板的四个角上,安装了四个光敏电阻,它们用于检测四个方向太阳光的最强位置。每个光敏电阻通过PCF8591模块与主控芯片相连,利用模数转换器(ADC)采集各个通道的数据值。
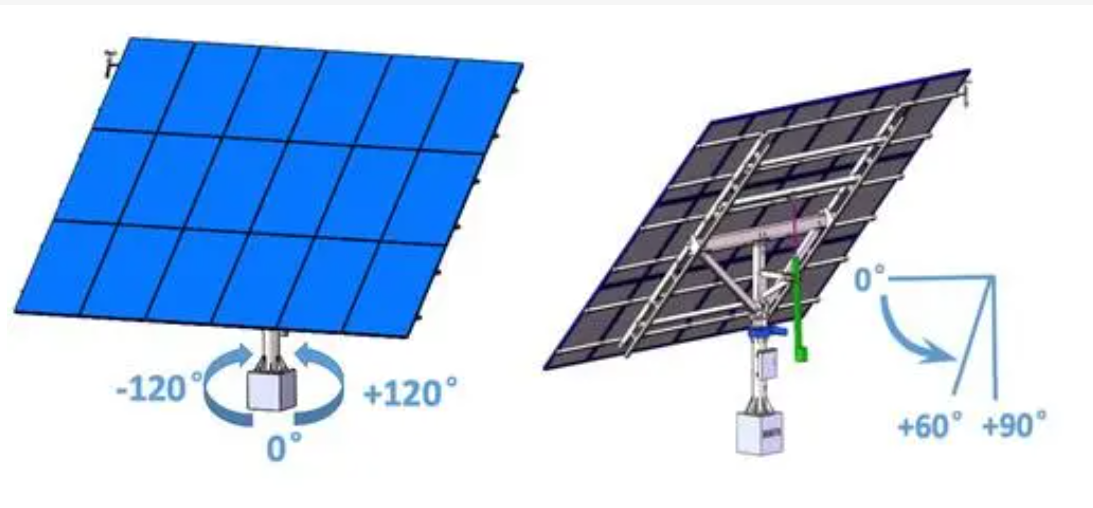
通过对四个光敏传感器采集到的数据进行处理和比较,主控芯片能够确定太阳光的最强位置所在。然后,通过控制两个28BYJ-48-5V步进电机的运动,太阳能光板可以实现左右和上下方向的旋转。通过调整太阳能光板的倾斜角度,使其与太阳光保持垂直,以获得最大的太阳能收集效率。
该太阳能跟踪器的设计旨在实现自动化的太阳光追踪,以提高太阳能光板的能源收集效率。通过使用光敏电阻、ADC转换和步进电机控制等技术手段,系统能够准确地确定太阳光的位置,并自动调整太阳能光板的朝向。这将大大提高太阳能系统的能源输出,并为可再生能源的利用做出贡献。

二、系统设计思路
2.1 硬件选型
【1】主控芯片:STC89C52 STC89C52是一款高性价比的单片机,具有丰富的外设和强大的计算能力。采用基于MCS-51内核的8位单片机架构,拥有存储容量大(8KB Flash和256B RAM)和丰富的IO口(32个),适合控制太阳能跟踪器系统的各种功能。
【2】光敏电阻:选择具有高灵敏度和较小尺寸的光敏电阻,并根据光照条件进行选择。通过与PCF8591模块连接,可以将光敏电阻的电阻值变化转换为相应的模拟电压信号。
【3】ADC模块:PCF8591 PCF8591是一款常用的4通道12位ADC模块,适用于将模拟信号转换为数字信号。通过连接4个光敏电阻到PCF8591的4个输入通道上,可以实现数据的采集和转换。
【4】步进电机:28BYJ-48-5V 28BYJ-48-5V步进电机是一个小型、低功耗的步进电机,适用于低速应用。使用两个步进电机可以控制太阳能光板在水平和垂直方向上的旋转,为太阳能跟踪器提供多个方向的调整。
2.2 设计思路
【1】硬件连接:根据项目需求,将STC89C52主控芯片与PCF8591模块、ULN2003驱动模块、28BYJ-48-5V步进电机、光敏电阻等进行正确的引脚连接。
【2】初始化设置:在主函数开始部分,进行必要的初始化设置,例如设置I/O口方向、定义引脚连接、初始化I2C总线等。
【3】光敏电阻采集:通过PCF8591模块采集4个光敏电阻的数据。使用I2C通信协议,向PCF8591模块发送控制字节,选择光敏电阻通道,并通过ADC转换获取光敏电阻的数值。将采集到的数据存储在名为lightSensor的数组中,每个元素对应一个光敏电阻通道。
【4】确定最强光位置:根据采集到的光敏电阻数据,通过比较找到最强光的位置。遍历lightSensor数组,记录最大值的索引,表示最强光所在的方向。
【5】步进电机控制:根据最强光的位置控制步进电机的旋转,使太阳能光板朝向最大光的方向。根据最大光位置的索引,使用条件语句判断旋转方向,然后调用StepperMotor_Rotate函数控制步进电机旋转。根据需求,可以设置旋转步数和旋转方向,以实现精确的转动控制。
【6】延时等待:在步进电机旋转完成后,可以添加适当的延时,以等待太阳能光板调整到新的位置。可以根据实际情况调整延时时间,确保光板稳定后进行下一次采集和控制。
【7】循环执行:将上述步骤放置在一个无限循环中,以实现持续的太阳能跟踪。程序将不断采集光敏电阻数据、确定最强光位置,并通过步进电机控制太阳能光板旋转,以获得最大的太阳能收集效率。
三、项目代码
3.1 PCF8591采集代码
以下是利用PCF8591的光敏电阻采集并通过串口打印的实现代码。
#include <reg52.h>
#include <intrins.h>// 定义PCF8591模块地址
#define PCF8591_ADDR 0x90// 定义光敏电阻通道
#define LDR_CHANNEL_1 0x00
#define LDR_CHANNEL_2 0x01
#define LDR_CHANNEL_3 0x02
#define LDR_CHANNEL_4 0x03// 定义波特率
#define BAUDRATE 9600// 函数声明
void delay(unsigned int time);
void uartInit();
void uartSendByte(unsigned char dat);
void uartSendString(unsigned char *str);
void pcf8591Init();
unsigned char pcf8591ReadChannel(unsigned char channel);void main() {unsigned char ldr1, ldr2, ldr3, ldr4;unsigned char str[20];uartInit(); // 初始化串口pcf8591Init(); // 初始化PCF8591模块while(1) {// 读取光敏电阻数据ldr1 = pcf8591ReadChannel(LDR_CHANNEL_1);ldr2 = pcf8591ReadChannel(LDR_CHANNEL_2);ldr3 = pcf8591ReadChannel(LDR_CHANNEL_3);ldr4 = pcf8591ReadChannel(LDR_CHANNEL_4);// 打印光敏电阻数据到串口sprintf(str, "LDR1: %d, LDR2: %d, LDR3: %d, LDR4: %d\r\n", ldr1, ldr2, ldr3, ldr4);uartSendString(str);delay(1000); // 延时一段时间后再进行下一次采集和打印}
}// 延时函数
void delay(unsigned int time) {unsigned int i, j;for(i = 0; i < time; i++) {for(j = 0; j < 125; j++);}
}// 初始化串口
void uartInit() {TMOD = 0x20; // 设置定时器1为模式2SCON = 0x50; // 设置串口工作方式1,允许接收TH1 = 256 - _cror(_cror(FOSC/12, 4), 4) / BAUDRATE; // 设置波特率TR1 = 1; // 启动定时器1
}// 串口发送单个字节
void uartSendByte(unsigned char dat) {SBUF = dat;while (!TI); // 等待发送完成TI = 0; // 清除发送完成标志位
}// 串口发送字符串
void uartSendString(unsigned char *str) {while (*str) {uartSendByte(*str);str++;}
}// 初始化PCF8591模块
void pcf8591Init() {// 发送启动转换命令I2C_Start(); I2C_Send_Byte(PCF8591_ADDR); // 发送设备地址I2C_Wait_Ack();I2C_Send_Byte(0x40); // 发送转换命令,选择通道0I2C_Wait_Ack();I2C_Stop();
}// 读取PCF8591模块的指定通道的数据值
unsigned char pcf8591ReadChannel(unsigned char channel) {unsigned char value;I2C_Start();I2C_Send_Byte(PCF8591_ADDR); // 发送设备地址I2C_Wait_Ack();I2C_Send_Byte(channel); // 发送通道号I2C_Wait_Ack();I2C_Start(); // 重新启动I2C_Send_Byte(PCF8591_ADDR + 1); // 发送读取命令I2C_Wait_Ack();value = I2C_Read_Byte(); // 读取数据I2C_Send_NAck();I2C_Stop();return value;
}3.2 主项目框架代码
#include <reg52.h>// 定义PCF8591模块的引脚连接
#define PCF8591_ADDRESS 0x90 // PCF8591模块的I2C地址
#define PCF8591_CONTROL 0x00 // PCF8591模块的控制寄存器地址// 定义步进电机的引脚连接
sbit IN1 = P1^0; // 步进电机引脚1
sbit IN2 = P1^1; // 步进电机引脚2
sbit IN3 = P1^2; // 步进电机引脚3
sbit IN4 = P1^3; // 步进电机引脚4// 定义步进电机旋转方向
#define CW 0 // 顺时针
#define CCW 1 // 逆时针// 定义光敏电阻通道
#define CHANNEL_0 0 // 光敏电阻通道0
#define CHANNEL_1 1 // 光敏电阻通道1
#define CHANNEL_2 2 // 光敏电阻通道2
#define CHANNEL_3 3 // 光敏电阻通道3// 延时函数
void delay(unsigned int ms) {unsigned int i, j;for (i = ms; i > 0; i--)for (j = 110; j > 0; j--);
}// I2C总线启动
void I2C_Start() {SDA = 1;SCL = 1;delay(1);SDA = 0;delay(1);SCL = 0;delay(1);
}// I2C总线停止
void I2C_Stop() {SDA = 0;SCL = 1;delay(1);SDA = 1;delay(1);
}// I2C发送一个字节的数据
void I2C_SendByte(unsigned char dat) {unsigned char i;for (i = 0; i < 8; i++) {SDA = (dat & 0x80) >> 7;dat <<= 1;delay(1);SCL = 1;delay(1);SCL = 0;delay(1);}SDA = 1;delay(1);SCL = 1;delay(1);while (SDA) continue;SCL = 0;
}// 从PCF8591读取一个字节的数据
unsigned char PCF8591_ReadByte() {unsigned char i, dat = 0;SDA = 1;for (i = 0; i < 8; i++) {dat <<= 1;SCL = 0;delay(1);SCL = 1;delay(1);if (SDA) dat |= 0x01;}SCL = 0;return dat;
}// 设置PCF8591的控制字节
void PCF8591_SetControl(unsigned char ctrl) {I2C_Start();I2C_SendByte(PCF8591_ADDRESS);I2C_SendByte(PCF8591_CONTROL);I2C_SendByte(ctrl);I2C_Stop();
}// 读取光敏电阻的数据
unsigned int ReadLightSensor(unsigned char channel) {unsigned int value;PCF8591_SetControl(0x40 | channel); // 选择光敏电阻通道delay(10); // 延时等待转换完成I2C_Start();I2C_SendByte(PCF8591_ADDRESS | 0x01); // 续上一段value = PCF8591_ReadByte(); // 读取高字节value = (value << 8) + PCF8591_ReadByte(); // 读取低字节I2C_Stop();return value;
}// 控制步进电机旋转
void StepperMotor_Rotate(unsigned char direction, unsigned int steps) {unsigned int i;for (i = 0; i < steps; i++) {// 顺时针旋转if (direction == CW) {IN1 = 1; IN2 = 0; IN3 = 0; IN4 = 0;delay(10);IN1 = 0; IN2 = 1; IN3 = 0; IN4 = 0;delay(10);IN1 = 0; IN2 = 0; IN3 = 1; IN4 = 0;delay(10);IN1 = 0; IN2 = 0; IN3 = 0; IN4 = 1;delay(10);}// 逆时针旋转else if (direction == CCW) {IN1 = 0; IN2 = 0; IN3 = 0; IN4 = 1;delay(10);IN1 = 0; IN2 = 0; IN3 = 1; IN4 = 0;delay(10);IN1 = 0; IN2 = 1; IN3 = 0; IN4 = 0;delay(10);IN1 = 1; IN2 = 0; IN3 = 0; IN4 = 0;delay(10);}}
}// 主函数
void main() {unsigned int lightSensor[4];unsigned char maxIndex;while (1) {// 采集光敏电阻数据lightSensor[0] = ReadLightSensor(CHANNEL_0);lightSensor[1] = ReadLightSensor(CHANNEL_1);lightSensor[2] = ReadLightSensor(CHANNEL_2);lightSensor[3] = ReadLightSensor(CHANNEL_3);// 确定最强光位置maxIndex = 0;if (lightSensor[1] > lightSensor[maxIndex]) maxIndex = 1;if (lightSensor[2] > lightSensor[maxIndex]) maxIndex = 2;if (lightSensor[3] > lightSensor[maxIndex]) maxIndex = 3;// 控制步进电机旋转if (maxIndex == 0) {StepperMotor_Rotate(CW, 100); // 右转} else if (maxIndex == 1) {StepperMotor_Rotate(CCW, 100); // 左转} else if (maxIndex == 2) {StepperMotor_Rotate(CW, 100); // 右转StepperMotor_Rotate(CW, 100); // 右转} else if (maxIndex == 3) {StepperMotor_Rotate(CCW, 100); // 左转StepperMotor_Rotate(CCW, 100); // 左转}delay(1000); // 延时一段时间}
}
相关文章:
基于单片机设计的太阳能跟踪器
一、前言 随着对可再生能源的需求不断增长,太阳能作为一种清洁、可持续的能源形式,受到越来越多的关注和应用。太阳能光板通常固定在一个固定的角度上,这限制了它们对太阳光的接收效率。为了充分利用太阳能资源,提高太阳能光板的…...
【踩坑及思考】浏览器存储 cookie 最大值超过 4kb,或 http 头 cookie 超过限制值
背景 本地生产环境:超过最大值 cookie token 不存储;客户生产环境:打开系统空白,且控制台报 http 400 错误; 出现了两种现象 现象一:浏览器对大于 4kb 的 cookie 值不存储 导致用户名密码登录ÿ…...

竞赛选题 深度学习实现行人重识别 - python opencv yolo Reid
文章目录 0 前言1 课题背景2 效果展示3 行人检测4 行人重识别5 其他工具6 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 **基于深度学习的行人重识别算法研究与实现 ** 该项目较为新颖,适合作为竞赛课题方向,…...
SpringCloud Gateway实现请求解密和响应加密
文章目录 前言正文一、项目简介二、核心代码2.1 自定义过滤器2.2 网关配置2.3 自定义配置类2.4 加密组件接口2.5 加密组件实现,AES算法2.6 启动类,校验支持的算法配置 三、请求报文示例四、测试结果4.1 网关项目启动时4.2 发生请求时 前言 本文环境使用比…...

IDEA创建Springboot多模块项目
一、创建父模块 File --> New --> Project ,选择 “ Spring Initalizr ” ,点击 Next Next Next --> Finish 二、创建子模块 右键根目录,New --> Module 选择 “ Spring Initializr ”,点击Next 此处注意T…...

React:JSX语法入门
JSX语法入门及代码 JSX是一种JavaScript的语法扩展,用于在React中描述用户界面的结构。它允许开发者使用类似HTML的语法来创建React元素,使得代码更具可读性和可维护性。JSX将HTML标签和JavaScript代码结合在一起,可以在其中使用JavaScript表…...
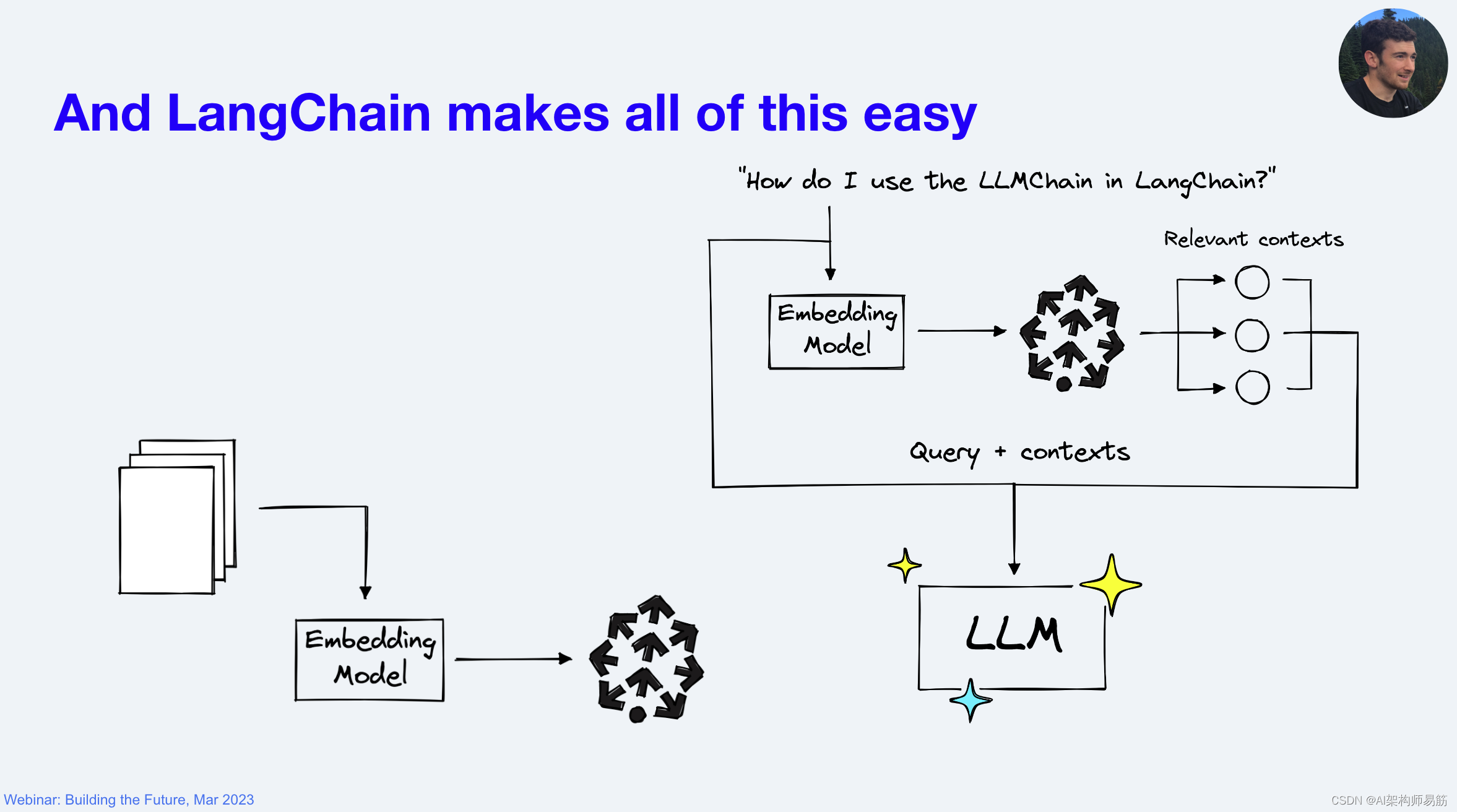
AI大模型架构师专家,你会问什么来测试我的水平,如何解答上述问题,学习路径是什么
0. 沈剑老师的大模型产品应用经验: 提示词三步骤: 假如我是xxx专家,你会问什么来测试我的水平;假如你是xxx专家,你会如何解答上述问题;假如你是xxx专家,上述问题的学习路径是什么;…...
Dev-C调试的基本方法2-1
在Dev-C中调试程序,首先需要在程序中设置断点,之后以调试的方式运行程序。 1 设置断点 当以调试的方式运行程序时,程序会在断点处停下来。点击要设置断点代码行号左侧部分,此时会有如图1所示的红点和绿色对勾,表示断…...
)
Linux 调试 (objdump/strace/strings)
目录 1. Linux 调试 (objdump/strace/strings)1.1. 查看系统 glibc 版本号1.2. 查看 so/bin 中的依赖1.3. 调试 bin 报错原因1.4. 查看 so/bin 中字符串 1. Linux 调试 (objdump/strace/strings) 1.1. 查看系统 glibc 版本号 1. 第一种 # ldd --version ldd (Ubuntu GLIBC 2.…...

CAS 单点登录详解
什么是CAS? - 简要介绍CAS(Central Authentication Service)的概念和作用。 - 强调CAS的主要目标是提供单点登录和单点登出功能。 CAS的工作原理 - 深入探讨CAS的工作原理,包括认证、票据、验证等核心概念。 - 详细解释CAS服务器和…...

tbh常用的绘图快捷键
1、Altb -> 笔刷 2、Alt/ -> 画笔 3、按住Shift 绘出的线条是直线 4、按住shiftalt 绘出来的线条是水平线或垂直线 5、alte ->橡皮擦 6、alts ->选择工具 7、altq -> 轮廓编辑器 以下操作都是在选中轮廓编辑器下操作的: 按住alt…...

Android-Framework 清除应用用户数据,不清除权限
一、环境 高通865 Android 10 二、具体详情 现象:默认赋予第三方应用的权限,在应用信息中清理用户数据的时候,权限也会被清理掉; 希望:只清理数据,保留权限 相关源码修改如下: frameworks/base/servi…...

CS认证办理流程,CS认证好处
CS资质全名叫“信息系统建设和服务能力评估体系” 所谓的CS认证,是指信息系统建设和服务能力评级。认证一共划分为五个等级,等级从低到高分别用CS1级(初始级)、CS2级(基本级)、CS3级(良好级&…...

macOS 安装brew
参考链接: https://mirrors4.tuna.tsinghua.edu.cn/help/homebrew/ https://www.yii666.com/blog/429332.html 安装中科大源的: https://zhuanlan.zhihu.com/p/470873649...
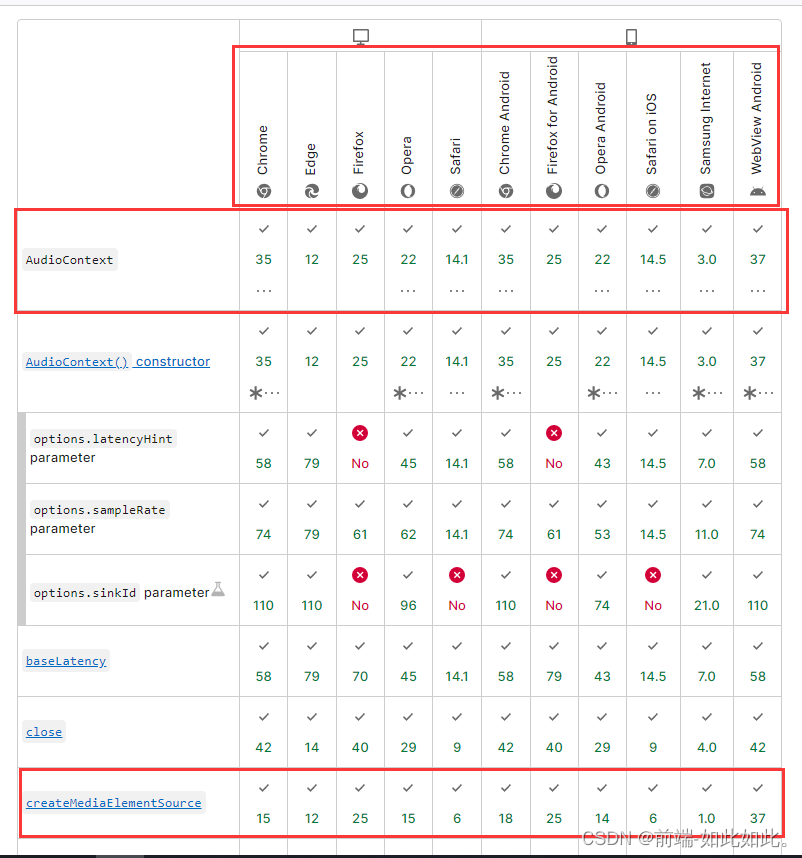
H5: 使用Web Audio API播放音乐
简介 记录关于自己使用 Web Audio API 的 AudioContext 播放音乐的知识点。 需求分析 1.列表展示音乐; 2.上/下一首、播放/暂停/续播; 3.播放模式切换:循环播放、单曲循环、随机播放; 4.播放状态显示:当前播放的音乐…...
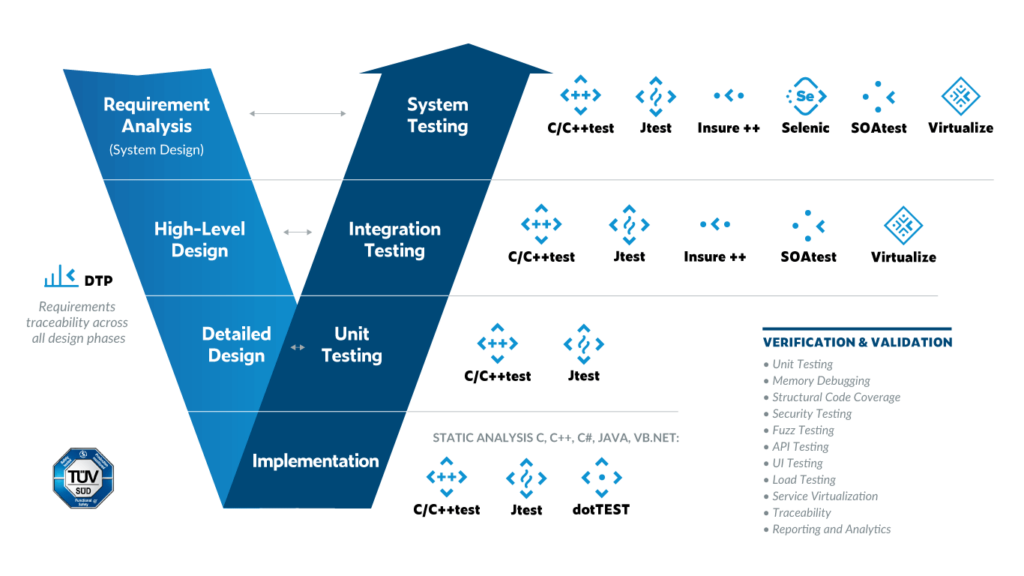
Parasoft C/C++test:汽车网络安全ISO 21434最佳实践
为什么汽车网络安全很重要Why Automotive Cybersecurity Is Important 许多汽车公司向电子道路车辆的转变从根本上改变了整个行业,提高了汽车的互联性和智能性。随着电子汽车变得更加互联和智能,它们也越来越依赖软件来实现车辆操作,驱动更多…...
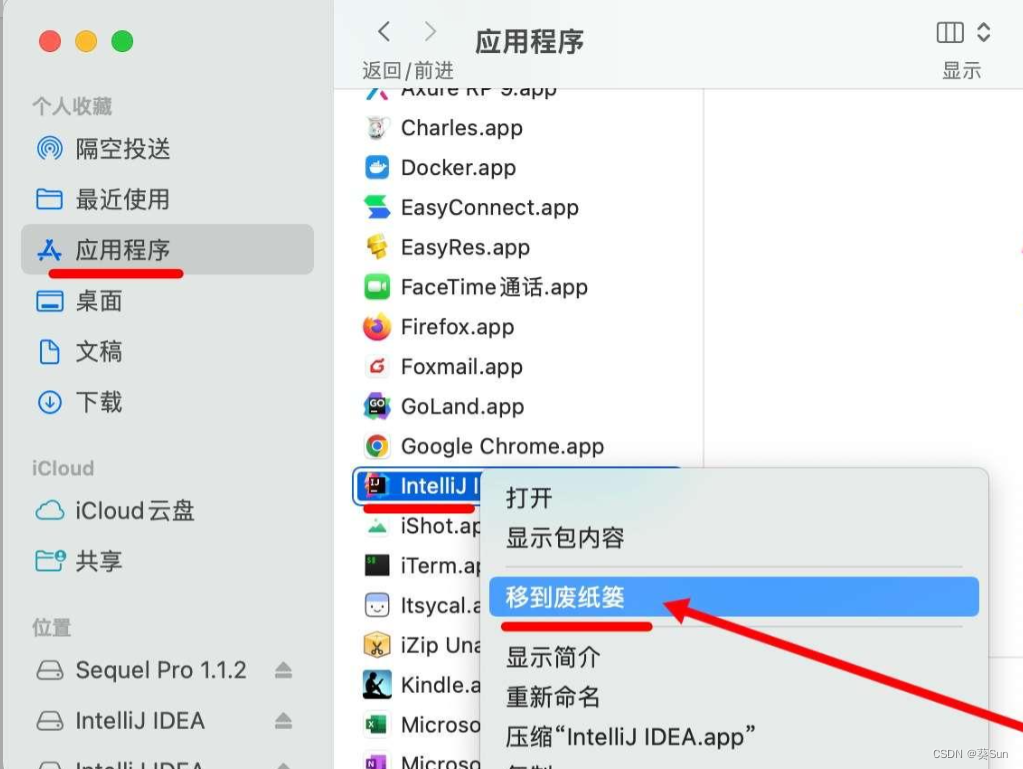
如何卸载干净 IDEA(图文讲解)windows和Mac教程
大家好,我是sun~ 很多小伙伴会问 Windows / Mac 系统上要怎么彻底卸载 IDEA 呢? 本文通过图片文字,详细讲解具体步骤: 如何卸载干净 IDEA(图文讲解) Windows1、卸载 IDEA 程序2、注册表清理3、残留清理 M…...

Docker搭建Gitlab
拉取镜像:docker pull gitlab/gitlab-ce创建映射目录: mkdir -p /usr/local/gitlab/config mkdir -p /usr/local/gitlab/data mkdir -p /usr/local/gitlab/logs运行容器: docker run -d -p 443:443 -p 8000:8000 -p 222:22 --name gitlab …...

STM32F4X SDIO(四) SDIO控制器
STM32F4X SDIO(四) SDIO控制器 STM32F4X SDIO控制器SDIO控制器框图SDIO控制器时钟适配器寄存器FIFO控制单元命令路径数据路径 SDIO寄存器SDIO控制相关寄存器SDIO电源控制寄存器 (SDIO_POWER)SDIO时钟控制寄存器 (SDIO_CLKCR)SDIO_CK相位 SDIO命令响应相关…...

【flink】Task 故障恢复详解以及各重启策略适用场景说明
文章目录 一. 重启策略种类(Restart Strategies)1. Fixed Delay Restart Strategy2. Failure Rate Restart Strategy3. Fallback Restart Strategy4. No Restart Strategy 二. 故障恢复策略(Failover Strategies)1. (全…...

C语言变量与运算符详解:从内存管理到高效编程实践
1. 从零到一:为什么C语言是程序员的“内功心法”?如果你刚看完系列的第一篇,对C语言有了一个模糊的印象,觉得它古老、复杂,甚至有点“过时”,那太正常了。我刚开始接触编程时,也这么想。为什么放…...

别再轮询了!在Qt里用HIDAPI实现USB设备通信,试试这个异步读取方案
告别轮询:在Qt中实现高效USB-HID异步通信的现代方案 当开发者需要在Qt应用中与USB-HID设备通信时,传统的轮询方式往往会导致UI卡顿、CPU资源浪费等问题。本文将介绍几种更优雅的异步通信方案,充分利用Qt的事件循环机制,实现高效、…...

Typora LaTeX主题:学术论文写作的终极解决方案
Typora LaTeX主题:学术论文写作的终极解决方案 【免费下载链接】typora-latex-theme 将Typora伪装成LaTeX的中文样式主题,本科生轻量级课程论文撰写的好帮手。This is a theme disguising Typora into Chinese LaTeX style. 项目地址: https://gitcode…...

通过Taotoken审计日志功能追踪与分析API调用情况
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过Taotoken审计日志功能追踪与分析API调用情况 对于使用大模型API进行开发的项目团队而言,清晰、透明地掌握API调用情…...

Google关键词能带来多少流量?大词和长尾词的真实流量比例
一家销售软件的公司耗费六个月将“CRM”排至谷歌首页第五名。该词每月产生50万次搜索。网页获得2100次点击。跳出率高达89%。停留时间仅12秒。投入资金4万美元。获得零份询盘。做“外贸企业定制管理软件”排名首页第一。此词汇每月搜索量150次。每月收获62次点击。停留时间4分3…...

OpenPnP玩家必看:深度解析松下DP102传感器与贴片机真空系统的联动原理与调优
OpenPnP系统集成实战:DP102负压传感器与真空控制回路的科学调优 在DIY贴片机的世界里,OpenPnP系统就像一位不知疲倦的指挥家,而DP102负压传感器则是这支精密乐队中的关键乐手。当吸嘴与元器件相遇的瞬间,背后是一场由气压数据驱动…...

避坑指南:CubeMX配置STM32F429三重ADC时,ADC2/3的DMA请求为啥点不了?附手动开启代码
STM32F429三重ADC配置疑难解析:当CubeMX无法启用ADC2/3的DMA请求时如何手动突破限制 在嵌入式开发中,STM32系列微控制器因其丰富的外设资源而备受青睐,其中ADC(模数转换器)模块的性能直接影响信号采集系统的精度与速度…...

MicMute:3秒掌握麦克风静音控制,告别会议尴尬时刻
MicMute:3秒掌握麦克风静音控制,告别会议尴尬时刻 【免费下载链接】MicMute Mute default mic clicking tray icon or shortcut 项目地址: https://gitcode.com/gh_mirrors/mi/MicMute 你是否曾在视频会议中因忘记静音而暴露尴尬的聊天背景声&…...

思源宋体TTF:免费专业中文字体终极使用指南
思源宋体TTF:免费专业中文字体终极使用指南 【免费下载链接】source-han-serif-ttf Source Han Serif TTF 项目地址: https://gitcode.com/gh_mirrors/so/source-han-serif-ttf 还在为中文排版找不到合适的免费字体而烦恼吗?思源宋体TTF正是你需要…...

基于ESP32的嵌入式AI语音交互系统:从硬件设计到软件实现全解析
1. 项目概述:从零打造一个会聊天的嵌入式AI伙伴几年前,当我第一次把“小爱同学”拆开,看到里面密密麻麻的芯片和电路时,一个念头就冒了出来:能不能自己动手,用一块开发板,从头搭建一个能听会说、…...