竞赛 深度学习疫情社交安全距离检测算法 - python opencv cnn
文章目录
- 0 前言
- 1 课题背景
- 2 实现效果
- 3 相关技术
- 3.1 YOLOV4
- 3.2 基于 DeepSort 算法的行人跟踪
- 4 最后
0 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 **基于深度学习疫情社交安全距离检测算法 **
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:5分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
1 课题背景
安全的社交距离是公共预防传染病毒的途径之一。所以,在人群密集的区域进行社交距离的安全评估是十分重要的。社交距离的测量旨在保持个体之间的物理距离和减少相互接触的人群来减缓或阻止病毒传播,在抗击病毒和预防大流感中发挥重要作用。但时刻保持安全距离具有一定的难度,特别是在校园,工厂等场所,在这种情况下,开发智能摄像头等技术尤为关键。将人工智能,深度学习集成至安全摄像头对行人进行社交距离评估。现阶段针对疫情防范的要求,主要采用人工干预和计算机处理技术。人工干预存在人力资源要求高,风险大,时间成本高等等缺点。计算机处理等人工智能技术的发展,对社交安全距离的安全评估具有良好的效果。
2 实现效果
通过距离分类人群的高危险和低危险距离。
相关代码
import argparse
from utils.datasets import *
from utils.utils import *def detect(save_img=False):out, source, weights, view_img, save_txt, imgsz = \opt.output, opt.source, opt.weights, opt.view_img, opt.save_txt, opt.img_sizewebcam = source == '0' or source.startswith('rtsp') or source.startswith('http') or source.endswith('.txt')# Initializedevice = torch_utils.select_device(opt.device)if os.path.exists(out):shutil.rmtree(out) # delete output folderos.makedirs(out) # make new output folderhalf = device.type != 'cpu' # half precision only supported on CUDA# Load modelgoogle_utils.attempt_download(weights)model = torch.load(weights, map_location=device)['model'].float() # load to FP32# torch.save(torch.load(weights, map_location=device), weights) # update model if SourceChangeWarning# model.fuse()model.to(device).eval()if half:model.half() # to FP16# Second-stage classifierclassify = Falseif classify:modelc = torch_utils.load_classifier(name='resnet101', n=2) # initializemodelc.load_state_dict(torch.load('weights/resnet101.pt', map_location=device)['model']) # load weightsmodelc.to(device).eval()# Set Dataloadervid_path, vid_writer = None, Noneif webcam:view_img = Truetorch.backends.cudnn.benchmark = True # set True to speed up constant image size inferencedataset = LoadStreams(source, img_size=imgsz)else:save_img = Truedataset = LoadImages(source, img_size=imgsz)# Get names and colorsnames = model.names if hasattr(model, 'names') else model.modules.namescolors = [[random.randint(0, 255) for _ in range(3)] for _ in range(len(names))]# Run inferencet0 = time.time()img = torch.zeros((1, 3, imgsz, imgsz), device=device) # init img_ = model(img.half() if half else img) if device.type != 'cpu' else None # run oncefor path, img, im0s, vid_cap in dataset:img = torch.from_numpy(img).to(device)img = img.half() if half else img.float() # uint8 to fp16/32img /= 255.0 # 0 - 255 to 0.0 - 1.0if img.ndimension() == 3:img = img.unsqueeze(0)# Inferencet1 = torch_utils.time_synchronized()pred = model(img, augment=opt.augment)[0]# Apply NMSpred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres,fast=True, classes=opt.classes, agnostic=opt.agnostic_nms)t2 = torch_utils.time_synchronized()# Apply Classifierif classify:pred = apply_classifier(pred, modelc, img, im0s)# List to store bounding coordinates of peoplepeople_coords = []# Process detectionsfor i, det in enumerate(pred): # detections per imageif webcam: # batch_size >= 1p, s, im0 = path[i], '%g: ' % i, im0s[i].copy()else:p, s, im0 = path, '', im0ssave_path = str(Path(out) / Path(p).name)s += '%gx%g ' % img.shape[2:] # print stringgn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwhif det is not None and len(det):# Rescale boxes from img_size to im0 sizedet[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()# Print resultsfor c in det[:, -1].unique():n = (det[:, -1] == c).sum() # detections per classs += '%g %ss, ' % (n, names[int(c)]) # add to string# Write resultsfor *xyxy, conf, cls in det:if save_txt: # Write to filexywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywhwith open(save_path[:save_path.rfind('.')] + '.txt', 'a') as file:file.write(('%g ' * 5 + '\n') % (cls, *xywh)) # label formatif save_img or view_img: # Add bbox to imagelabel = '%s %.2f' % (names[int(cls)], conf)if label is not None:if (label.split())[0] == 'person':people_coords.append(xyxy)# plot_one_box(xyxy, im0, line_thickness=3)plot_dots_on_people(xyxy, im0)# Plot lines connecting peopledistancing(people_coords, im0, dist_thres_lim=(200,250))# Print time (inference + NMS)print('%sDone. (%.3fs)' % (s, t2 - t1))# Stream resultsif view_img:cv2.imshow(p, im0)if cv2.waitKey(1) == ord('q'): # q to quitraise StopIteration# Save results (image with detections)if save_img:if dataset.mode == 'images':cv2.imwrite(save_path, im0)else:if vid_path != save_path: # new videovid_path = save_pathif isinstance(vid_writer, cv2.VideoWriter):vid_writer.release() # release previous video writerfps = vid_cap.get(cv2.CAP_PROP_FPS)w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))vid_writer = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*opt.fourcc), fps, (w, h))vid_writer.write(im0)if save_txt or save_img:print('Results saved to %s' % os.getcwd() + os.sep + out)if platform == 'darwin': # MacOSos.system('open ' + save_path)print('Done. (%.3fs)' % (time.time() - t0))
3 相关技术
3.1 YOLOV4
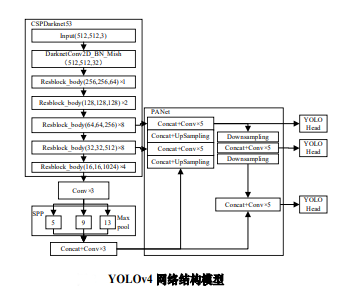
YOLOv4使用卷积网络 CSPDarknet-53 特征提取,网络结构模型如图 2 所示。在每个 Darknet-53的残块行加上 CSP(Cross
Stage Partial)结构13,将基础层划分为两部分,再通过跨层次结构的特征融合进行合并。并采用 FPN( feature pyramid
networks)结构加强特征金字塔,最后用不同层的特征的高分辨率来提取不同尺度特征图进行对象检测。最终网络输出 3
个不同尺度的特征图,在三个不同尺度特征图上分别使用 3 个不同的先验框(anchors)进行预测识别,使得远近大小目标均能得到较好的检测。
YOLOv4 的先验框尺寸是经PASCALL_VOC,COCO
数据集包含的种类复杂而生成的,并不一定完全适合行人。本研究旨在研究行人之间的社交距离,针对行人目标检测,利用聚类算法对 YOLOv4
的先验框微调,首先将行人数据集 F 依据相似性分为i个对象,即 ,其中每个对象都具有 m
,其中每个对象都具有 m
个维度的属性。聚类算法的目的是 i 个对象依据相似性聚集到指定的 j 个类簇,每个对象属于且仅属于一个其到类簇中心距离最小的类簇中心。初始化 j 个 聚 类
中 心 ,计算每一个对象到每一个聚类中心的欧式距离,见公式
,计算每一个对象到每一个聚类中心的欧式距离,见公式
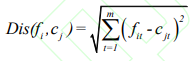
之后,依次比较每个对象到每个聚类中心的距离,将对象分配至距离最近的簇类中心的类簇中,
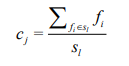
得到  个类簇
个类簇 ,聚类算法中定义了类簇的原型,类簇中心就是类簇内所有对象在各个维度的均值,其公式见
,聚类算法中定义了类簇的原型,类簇中心就是类簇内所有对象在各个维度的均值,其公式见
相关代码
def check_anchors(dataset, model, thr=4.0, imgsz=640):# Check anchor fit to data, recompute if necessaryprint('\nAnalyzing anchors... ', end='')m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)])).float() # whdef metric(k): # compute metricr = wh[:, None] / k[None]x = torch.min(r, 1. / r).min(2)[0] # ratio metricbest = x.max(1)[0] # best_xreturn (best > 1. / thr).float().mean() # best possible recallbpr = metric(m.anchor_grid.clone().cpu().view(-1, 2))print('Best Possible Recall (BPR) = %.4f' % bpr, end='')if bpr < 0.99: # threshold to recomputeprint('. Attempting to generate improved anchors, please wait...' % bpr)na = m.anchor_grid.numel() // 2 # number of anchorsnew_anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)new_bpr = metric(new_anchors.reshape(-1, 2))if new_bpr > bpr: # replace anchorsnew_anchors = torch.tensor(new_anchors, device=m.anchors.device).type_as(m.anchors)m.anchor_grid[:] = new_anchors.clone().view_as(m.anchor_grid) # for inferencem.anchors[:] = new_anchors.clone().view_as(m.anchors) / m.stride.to(m.anchors.device).view(-1, 1, 1) # lossprint('New anchors saved to model. Update model *.yaml to use these anchors in the future.')else:print('Original anchors better than new anchors. Proceeding with original anchors.')print('') # newline
3.2 基于 DeepSort 算法的行人跟踪
YOLOv4中完成行人目标检测后生成边界框(Bounding box,Bbox),Bbox 含有包含最小化行人边框矩形的坐标信息,本研究引入
DeepSort 算法[18]完成对行人的质点进行跟踪,目的是为了在运动矢量分析时算行人安全社交距离中。首先,对行人进行质点化计算。其质点计算公式如
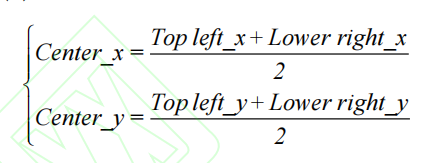
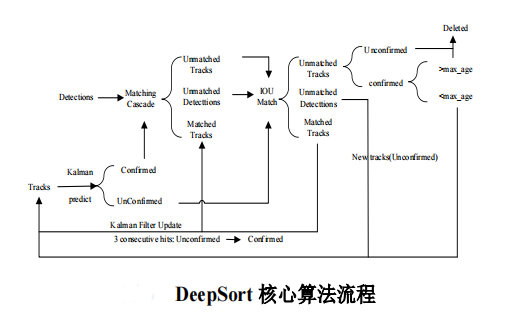
确定行人质点后,利用 DeepSort 算法实现对多个目标的精确定位与跟踪,其核心算法流程如图所示:
相关代码
class TrackState:'''单个轨迹的三种状态'''Tentative = 1 #不确定态Confirmed = 2 #确定态Deleted = 3 #删除态class Track:def __init__(self, mean, covariance, track_id, class_id, conf, n_init, max_age,feature=None):'''mean:位置、速度状态分布均值向量,维度(8×1)convariance:位置、速度状态分布方差矩阵,维度(8×8)track_id:轨迹IDclass_id:轨迹所属类别hits:轨迹更新次数(初始化为1),即轨迹与目标连续匹配成功次数age:轨迹连续存在的帧数(初始化为1),即轨迹出现到被删除的连续总帧数time_since_update:轨迹距离上次更新后的连续帧数(初始化为0),即轨迹与目标连续匹配失败次数state:轨迹状态features:轨迹所属目标的外观语义特征,轨迹匹配成功时添加当前帧的新外观语义特征conf:轨迹所属目标的置信度得分_n_init:轨迹状态由不确定态到确定态所需连续匹配成功的次数_max_age:轨迹状态由不确定态到删除态所需连续匹配失败的次数''' self.mean = meanself.covariance = covarianceself.track_id = track_idself.class_id = int(class_id)self.hits = 1self.age = 1self.time_since_update = 0self.state = TrackState.Tentativeself.features = []if feature is not None:self.features.append(feature) #若不为None,初始化外观语义特征self.conf = confself._n_init = n_initself._max_age = max_agedef increment_age(self):'''预测下一帧轨迹时调用'''self.age += 1 #轨迹连续存在帧数+1self.time_since_update += 1 #轨迹连续匹配失败次数+1def predict(self, kf):'''预测下一帧轨迹信息'''self.mean, self.covariance = kf.predict(self.mean, self.covariance) #卡尔曼滤波预测下一帧轨迹的状态均值和方差self.increment_age() #调用函数,age+1,time_since_update+1def update(self, kf, detection, class_id, conf):'''更新匹配成功的轨迹信息'''self.conf = conf #更新置信度得分self.mean, self.covariance = kf.update(self.mean, self.covariance, detection.to_xyah()) #卡尔曼滤波更新轨迹的状态均值和方差self.features.append(detection.feature) #添加轨迹对应目标框的外观语义特征self.class_id = class_id.int() #更新轨迹所属类别self.hits += 1 #轨迹匹配成功次数+1self.time_since_update = 0 #匹配成功时,轨迹连续匹配失败次数归0if self.state == TrackState.Tentative and self.hits >= self._n_init:self.state = TrackState.Confirmed #当连续匹配成功次数达标时轨迹由不确定态转为确定态def mark_missed(self):'''将轨迹状态转为删除态'''if self.state == TrackState.Tentative:self.state = TrackState.Deleted #当级联匹配和IOU匹配后仍为不确定态elif self.time_since_update > self._max_age:self.state = TrackState.Deleted #当连续匹配失败次数超标'''该部分还存在一些轨迹坐标转化及状态判定函数,具体可参考代码来源'''
4 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
竞赛 深度学习疫情社交安全距离检测算法 - python opencv cnn
文章目录 0 前言1 课题背景2 实现效果3 相关技术3.1 YOLOV43.2 基于 DeepSort 算法的行人跟踪 4 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 **基于深度学习疫情社交安全距离检测算法 ** 该项目较为新颖,适合作为竞赛…...

无声的世界,精神科用药并结合临床的一些分析及笔记(十)
目录 回 “ 家 ” 克服恐惧 奥沙西泮 除夕 酒与药 警告 离别 回 “ 家 ” 她的锥切手术进行的很顺利,按计划继续返回安定医院调节心理状态,病友们都盼着我们回“家”。当我俩跨入病区,大家都涌过来帮我们大包小包的拎着行李࿰…...

构建强大的Web应用之Django详解
引言: Django是一个功能强大且灵活的Python Web框架,它提供了一套完整的工具和功能,帮助开发者快速构建高效的Web应用。本篇文章将带您逐步了解Django的基本概念和使用方法,并通过实际的代码案例,帮助您从零开始构建自…...

Linux 之搭建 arm 的 qemu 模拟器
目录 1. Linux 之搭建 arm 的 qemu 模拟器 1. Linux 之搭建 arm 的 qemu 模拟器 OS: kali 1. 安装交叉编译工具、GDB 和 QEMU # sudo apt-get install qemu debootstrap qemu-user-static # sudo apt-get install qemu-system-arm # sudo apt-get install gdb-multiarch //支持…...
uinapp微信小程序隐私政策授权
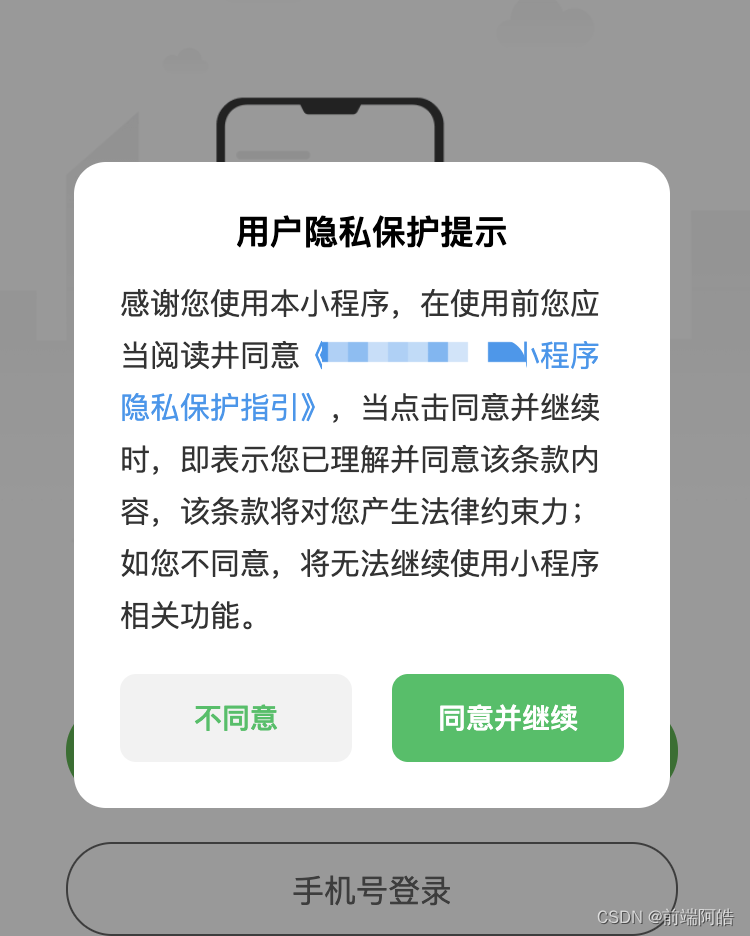
🚀 隐私弹窗效果图: 1、启用隐私相关功能在manifest.json文件中配置 usePrivacyCheck: true "mp-weixin" : {"__usePrivacyCheck__" : true, },2、创建组件 <template><view><!-- 隐私政策弹窗 --><uni-popu…...

使用Java工作流简单介绍
本人详解 作者:王文峰,参加过 CSDN 2020年度博客之星,《Java王大师王天师》 公众号:JAVA开发王大师,专注于天道酬勤的 Java 开发问题中国国学、传统文化和代码爱好者的程序人生,期待你的关注和支持!本人外号:神秘小峯 山峯 转载说明:务必注明来源(注明:作者:王文峰…...

数字媒体技术基础之:ICC 配置文件
ICC 配置文件(也称为 ICC 色彩配置文件或 ICC 色彩描述文件)是由国际色彩联盟(International Color Consortium, ICC)制定的一种标准文件格式,用于在不同的设备和软件之间保持颜色的一致性。 ICC 配置文件包含有关设备…...
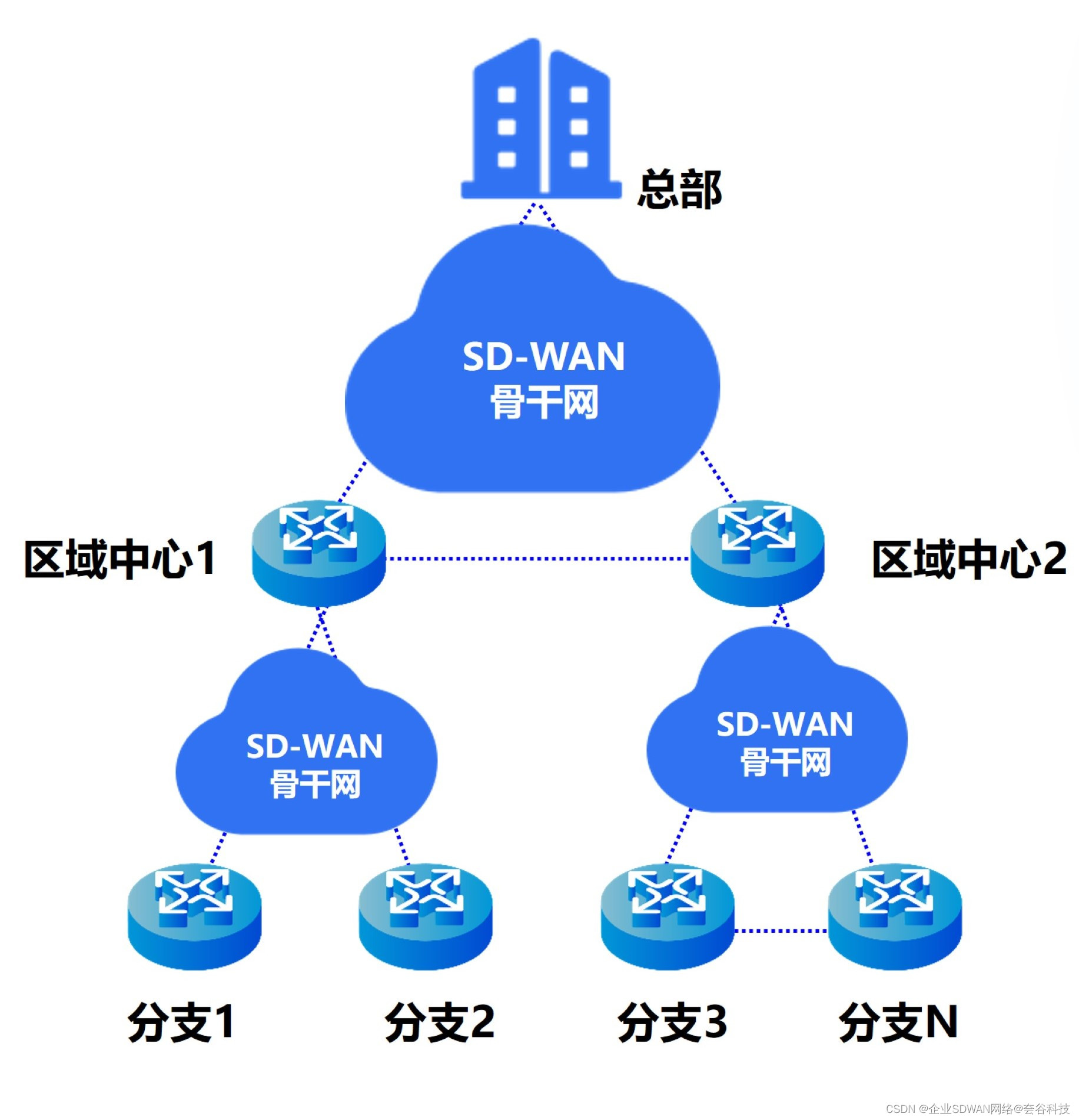
解析SD-WAN组网方式及应用场景,全面了解典型案例
随着企业业务高速发展,跨区域开展业务首要解决的难题是构建各站点能互联互通的网络,然而目前大多数企业在广域网优化的问题上依旧碰壁,主要原因是企业广域网面临的挑战并不能马上得到解决。 传统网络互联方案无论是IPsec还是专线,…...

中小学智慧校园电子班牌管理系统源码
智慧校园云平台电子班牌系统,利用先进的云计算技术,将教育信息化资源和教学管理系统进行有效整合,实现基础数据共享、应用统一管理。借助全新的智能交互识别终端和移动化教育管理系统,以考勤、课表、通知、家校互通等功能为切入点…...
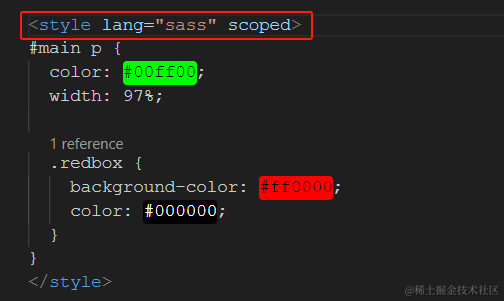
日常踩坑-[sass]Error: Expected newline
在学习sass的时候,运行时发现报错 经过网上冲浪知道,原来在声明语言的时候 lang 不能声明为 sass ,而是 scss ,这就有点坑了 原因: scss是sass3引入进来的,scss语法有"{}“,”;"而sass没有,所以…...
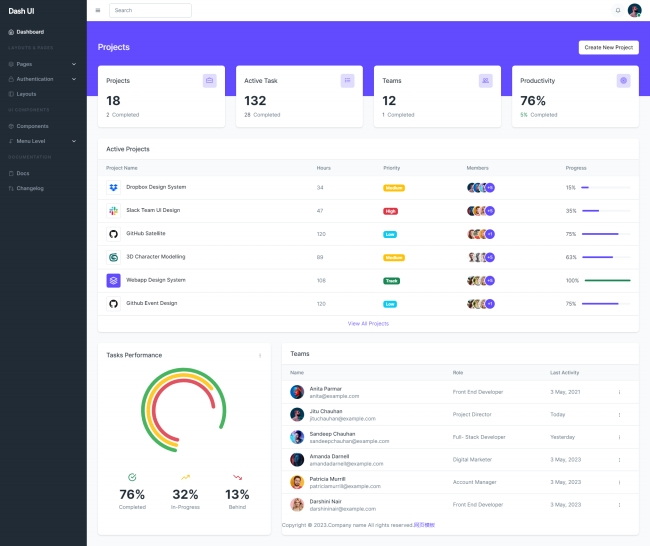
UI设计感蓝色商务数据后台网站模板源码
蓝色商务数据后台网站模板是一款适合网站模板下载。提示:本模板调用到谷歌字体库,可能会出现页面打开比较缓慢。 演示下载 qnziyw点cn/wysc/qdmb/20852点html...
二、计算机组成原理与体系结构
(一)数据的表示 不同进制之间的转换 R 进制转十进制使用按权展开法,其具体操作方式为:将 R 进制数的每一位数值用 Rk 形式表示,即幂的底数是 R ,指数为 k ,k 与该位和小数点之间的距离有关。当…...

MySQL-sql的优化
表的设计优化索引优化SQL语句优化主从复制、读写分离分库分表 表的设计优化(参考阿里开发手册) 比如设置合适的数值(tinyint int bigint),要根据实际情况选择 比如设置合适的字符串类型(char和varchar) char定长效率高,varchar可变长度,效…...
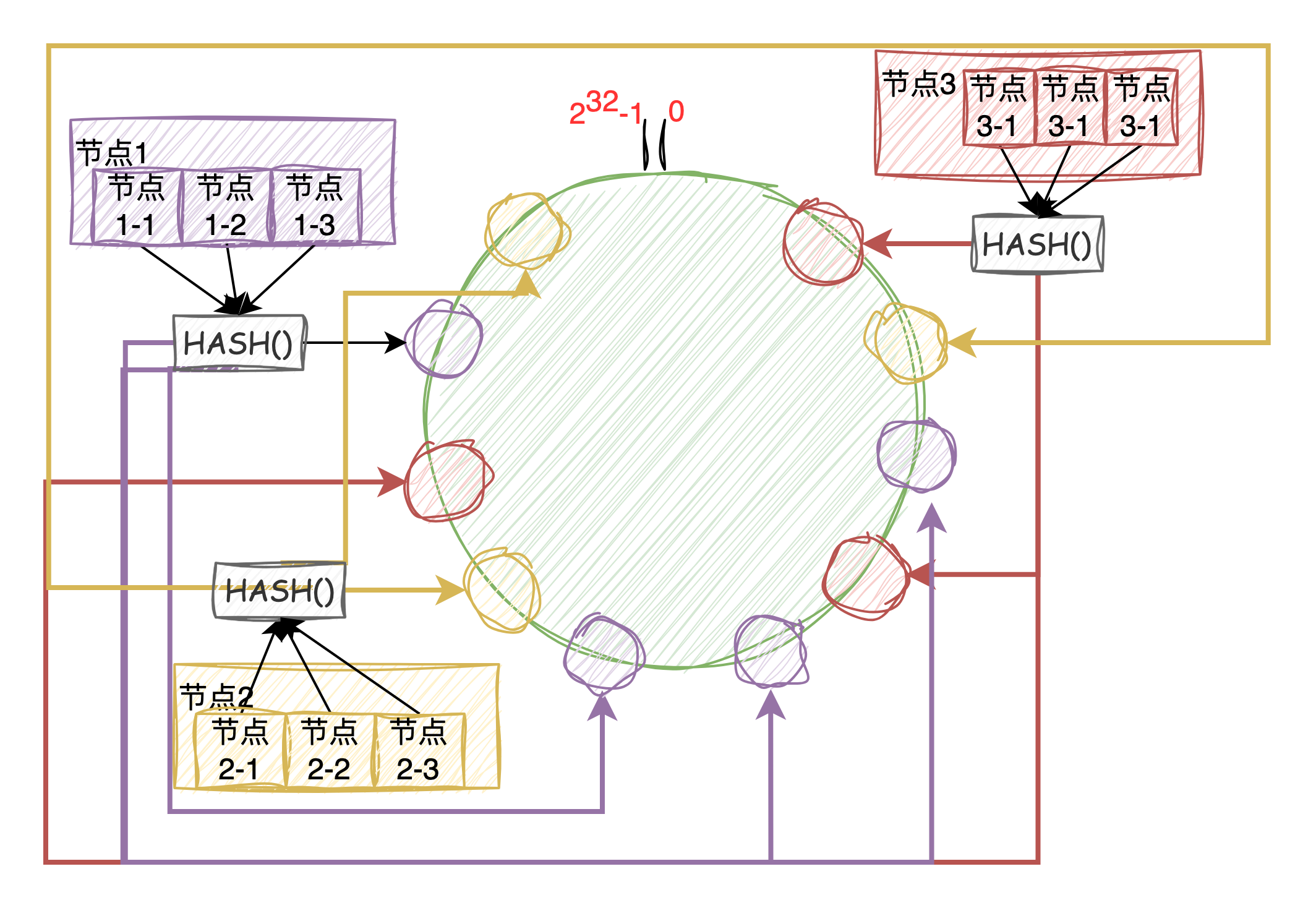
一致性哈希在分库分表的应用
文章目录 前言分库分表方法一致性哈希介绍分库分表的应用 总结 前言 大家应该都知道一些哈希算法,比如MD5、SHA-1、SHA-256等,通常被用于唯一标识、安全加密、数据校验等场景。除此之外,还有一种应用是对某个数据进行哈希取模映射到一个有限…...
PostCSS通过px2rem插件和lib-flexible将px单位转换为rem(root em)单位实现大屏适配
目录 文档postcss中使用postcss-plugin-px2rem安装postcss-plugin-px2rem示例默认配置 webpack中使用postcss-plugin-px2rem项目结构安装依赖文件内容 大屏适配参考文章 文档 类似的插件 postcss-plugin-px2rem https://www.npmjs.com/package/postcss-plugin-px2remhttps://g…...

什么是缓冲区溢出?
缓冲区溢出 1. 什么是缓冲区溢出2. 缓冲区溢出攻击的类型3. 攻击者如何利用缓冲区溢出4. 如何防止缓冲区溢出攻击 1. 什么是缓冲区溢出 (1)缓冲区 缓冲区是一块连续的计算机内存区域,用于在将数据从一个位置移到另一位置时临时存储数据。这…...

论文浅尝 | ChatKBQA:基于微调大语言模型的知识图谱问答框架
第一作者:罗浩然,北京邮电大学博士研究生,研究方向为知识图谱与大语言模型协同推理 OpenKG地址:http://openkg.cn/tool/bupt-chatkbqa GitHub地址:https://github.com/LHRLAB/ChatKBQA 论文链接:https://ar…...

软件测试的目的---防范项目风险
软件测试的目的到底是什么一直是困扰开发人员和测试人员的一个问题, 项目管理人员希望测试能够保证软件项目的成功 开发人员希望希望测试可以让他们理直气壮的说,他们的软件是没有问题的,从而证明他们的工作成果 软件测试经典理论说,测试无法证明软件是没有问题,而只能证明软…...

自己动手写编译器:创建由 C 语言编译而成的语法解析器
在上一章节,我们完成了由 c 语言设计的输入系统,本节我们看看如何在前一节的基础上完成一个由 c 语言设计并编译出来的词法解析器。整个解析器的基本设计思路是: 1,由我们上一节设计的输入系统将字符串从文件中读入。 2࿰…...

接口设计-增删改查
关于增删改查的 接口设计,比较简单,有一些固定的做法可以使用。 查询列表 查询列表的接口,带上分页的入参: pageNo,pageSize,非必选,并设置默认值。 入参为 dto,根据 dto 从数据库…...

Unity安卓构建72小时实战指南:从零到真机运行
1. 这不是“又一本Unity教程”,而是我带三个新人从零上线第一款安卓游戏的真实路径你点开这个标题,大概率正站在两个路口之间:一边是满屏“30天速成Unity”“零基础做爆款”的短视频封面,一边是你刚下载完Unity Hub、卡在Android …...

嵌入式快速原型开发:基于Sceptre平台与LPC2148的实战指南
1. 项目概述:Sceptre,一个被低估的嵌入式快速原型利器 在嵌入式开发的世界里,我们总是在寻找那个“刚刚好”的平台:它要足够强大,能跑复杂的算法;要足够小巧,能塞进各种外壳;要足够便…...

LoRa物联网与动态基线算法在养殖体温监测中的实战应用
1. 项目概述:为什么我们需要一个智能体温监测系统?在规模化养殖场里干了十几年,我见过太多因为体温异常没被及时发现而导致的损失。一头育肥猪突然不吃食,等饲养员第二天巡栏发现时,可能已经高烧好几天,继发…...

UE4SS终极指南:从零开始掌握虚幻引擎脚本系统
UE4SS终极指南:从零开始掌握虚幻引擎脚本系统 【免费下载链接】RE-UE4SS Injectable LUA scripting system, SDK generator, live property editor and other dumping utilities for UE4/5 games 项目地址: https://gitcode.com/gh_mirrors/re/RE-UE4SS UE4S…...

D2DX如何让暗黑破坏神2在4K显示器上流畅运行:5个关键技术解析
D2DX如何让暗黑破坏神2在4K显示器上流畅运行:5个关键技术解析 【免费下载链接】d2dx D2DX is a complete solution to make Diablo II run well on modern PCs, with high fps and better resolutions. 项目地址: https://gitcode.com/gh_mirrors/d2/d2dx 当…...

告别RaiDrive广告!用开源rclone+Alist,免费把阿里云盘/百度网盘变成电脑本地硬盘
开源方案实战:用rcloneAlist打造无广告的云盘本地化体验 每次打开RaiDrive时弹出的广告窗口是否让您感到困扰?商业软件的收费模式是否让您犹豫不决?今天,我们将彻底解决这些问题。通过开源工具Alist和rclone的组合,您不…...

3步快速恢复加密压缩包密码:ArchivePasswordTestTool终极指南
3步快速恢复加密压缩包密码:ArchivePasswordTestTool终极指南 【免费下载链接】ArchivePasswordTestTool 利用7zip测试压缩包的功能 对加密压缩包进行自动化测试密码 项目地址: https://gitcode.com/gh_mirrors/ar/ArchivePasswordTestTool 面对遗忘的加密压…...

密码学入门:区块链中的密码学原理
密码学入门:区块链中的密码学原理 大家好,我是欧阳瑞(Rich Own)。今天想和大家聊聊密码学这个重要话题。作为一个Web3探索者,密码学是区块链的基础。今天就来分享一下区块链中常用的密码学原理。 为什么密码学很重要&a…...

关于软件版本升级的故事
起因在群里有网友说软件的版本升级比较简单,俺就回了四个字母“PACS”,并补上了一个表情 然后看见开始细说了:一、PACS 属于哪一类?PACS 软件 第二类医疗器械(独立软件)国家药监局分类:Ⅱ 类 2…...

5分钟掌握m4s-converter:将B站缓存视频无损转换为MP4的终极指南
5分钟掌握m4s-converter:将B站缓存视频无损转换为MP4的终极指南 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 你是否曾在B站缓存了…...