SurfaceFlinger的硬件Vsync深入分析-千里马android framework车机手机系统开发
背景:
学过或者你看过surfaceflinger相关文章同学都知道,vsync其实都是由surfaceflinger软件层面进行模拟的,但是软件模拟有可能会有误差或偏差,这个时候就需要有个硬件vsync帮忙校准。
故才会在surfaceflinger的systrace出现如下校准波形图,这个可以看到硬件vsync开启后才有hw的vsync的脉冲产生,这个刚好可以看到成对的一上一下脉冲刚好6个,也就是经常看到的6个周期的,经过这个6个硬件vsync的校准后,软件vsync就可以调整正常。
 但是。。。一切一切都是好像是这么一回事,具体怎么就产生这些硬件vsync的波形的呢?硬件vsync为啥说他来自硬件呢?怎么就来自硬件呢?好像一切都好虚是不是,那不是肯定的吗?那么今天就来彻底解密一下这个硬件vsync的执行哈,注意下面很多kernel驱动相关代码。。。。。具体相关代码付费课学员直接就会配套有哈。
但是。。。一切一切都是好像是这么一回事,具体怎么就产生这些硬件vsync的波形的呢?硬件vsync为啥说他来自硬件呢?怎么就来自硬件呢?好像一切都好虚是不是,那不是肯定的吗?那么今天就来彻底解密一下这个硬件vsync的执行哈,注意下面很多kernel驱动相关代码。。。。。具体相关代码付费课学员直接就会配套有哈。
更多framework实战课可以加我V:androidframework007

surfaceflinger端硬件Vsync的调用trace:
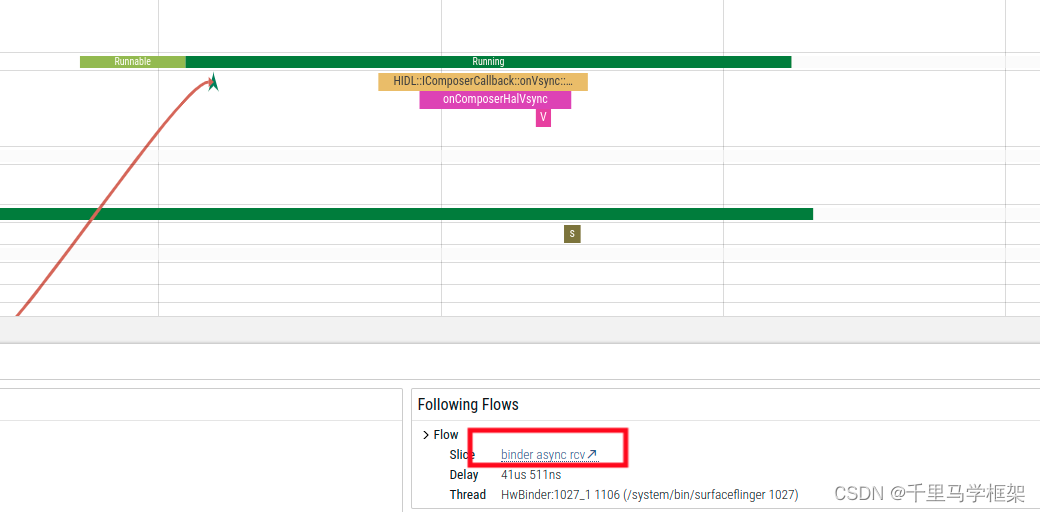
这个相对很好看到如下图所示:
 明显看到这个东西实际是hal进程通过跨进程回调到了surfaceflinger进程的,那么就来看看hal部分
明显看到这个东西实际是hal进程通过跨进程回调到了surfaceflinger进程的,那么就来看看hal部分
hal端的回调硬件Vsync堆栈
首先来看看我们的trace图形,这个直接surfaceflinger箭头点击一跳就可以了
 这个时候就到了graphic的hal进程相关trace图形如下
这个时候就到了graphic的hal进程相关trace图形如下

可以看到这个确实是hal端的SDM_EventThread线程进行调用的,这里按着代码一直追的化追到如下地方了:
11-04 23:21:53.200 977 1065 D Vsync : #00 pc 000000000003b65c /vendor/lib64/hw/hwcomposer.msm8998.so (sdm::HWCCallbacks::Vsync(unsigned long, long)+76)
11-04 23:21:53.200 977 1065 D Vsync : #01 pc 000000000002f9c8 /vendor/lib64/hw/hwcomposer.msm8998.so (sdm::HWCDisplay::VSync(sdm::DisplayEventVSync const&)+28)
11-04 23:21:53.200 977 1065 D Vsync : #02 pc 000000000002c818 /vendor/lib64/libsdmcore.so (non-virtual thunk to sdm::DisplayPrimary::VSync(long)+68)
11-04 23:21:53.200 977 1065 D Vsync : #03 pc 0000000000048dc8 /vendor/lib64/libsdmcore.so (sdm::HWEvents::DisplayEventHandler()+288)
11-04 23:21:53.200 977 1065 D Vsync : #04 pc 0000000000048b60 /vendor/lib64/libsdmcore.so (sdm::HWEvents::DisplayEventThread(void*)+16)
11-04 23:21:53.200 977 1065 D Vsync : #05 pc 00000000000b63b0 /apex/com.android.runtime/lib64/bionic/libc.so (__pthread_start(void*)+208)
11-04 23:21:53.200 977 1065 D Vsync : #06 pc 00000000000530b8 /apex/com.android.runtime/lib64/bionic/libc.so (__start_thread+64)这里就来从最根部的地方开始看到底hal的这个事件是谁触发的?是hal直接和硬件通讯?哈哈,想想也不可能是吧,因为hal进程也是个应用空间的程序而已,无法直接操作硬件。直接上代码揭晓答案:
//初始化相关的poll的fd
pollfd HWEvents::InitializePollFd(HWEventData *event_data) {char node_path[kMaxStringLength] = {0};char data[kMaxStringLength] = {0};pollfd poll_fd = {0};poll_fd.fd = -1;if (event_data->event_type == HWEvent::EXIT) {// Create an eventfd to be used to unblock the poll system call when// a thread is exiting.poll_fd.fd = Sys::eventfd_(0, 0);poll_fd.events |= POLLIN;exit_fd_ = poll_fd.fd;} else {snprintf(node_path, sizeof(node_path), "%s%d/%s", fb_path_, fb_num_,map_event_to_node_[event_data->event_type]);poll_fd.fd = Sys::open_(node_path, O_RDONLY);poll_fd.events |= POLLPRI | POLLERR;}if (poll_fd.fd < 0) {DLOGW("open failed for display=%d event=%s, error=%s", fb_num_,map_event_to_node_[event_data->event_type], strerror(errno));return poll_fd;}// Read once on all fds to clear data on all fds.Sys::pread_(poll_fd.fd, data , kMaxStringLength, 0);return poll_fd;
}
//设置相关的event_type解析方法
DisplayError HWEvents::SetEventParser(HWEvent event_type, HWEventData *event_data) {DisplayError error = kErrorNone;switch (event_type) {case HWEvent::VSYNC:event_data->event_parser = &HWEvents::HandleVSync;break;case HWEvent::IDLE_NOTIFY:event_data->event_parser = &HWEvents::HandleIdleTimeout;break;case HWEvent::EXIT:event_data->event_parser = &HWEvents::HandleThreadExit;break;case HWEvent::SHOW_BLANK_EVENT:event_data->event_parser = &HWEvents::HandleBlank;break;case HWEvent::THERMAL_LEVEL:event_data->event_parser = &HWEvents::HandleThermal;break;case HWEvent::IDLE_POWER_COLLAPSE:event_data->event_parser = &HWEvents::HandleIdlePowerCollapse;break;default:error = kErrorParameters;break;}return error;
}void HWEvents::PopulateHWEventData() {for (uint32_t i = 0; i < event_list_.size(); i++) {HWEventData event_data;event_data.event_type = event_list_[i];SetEventParser(event_list_[i], &event_data);poll_fds_[i] = InitializePollFd(&event_data);event_data_list_.push_back(event_data);}
}DisplayError HWEvents::Init(int fb_num, HWEventHandler *event_handler,const vector<HWEvent> &event_list) {
//创建线程执行循环pollif (pthread_create(&event_thread_, NULL, &DisplayEventThread, this) < 0) {DLOGE("Failed to start %s, error = %s", event_thread_name_.c_str());return kErrorResources;}return kErrorNone;
}void* HWEvents::DisplayEventThread(void *context) {if (context) {return reinterpret_cast<HWEvents *>(context)->DisplayEventHandler();}return NULL;
}
//真的线程执行体
void* HWEvents::DisplayEventHandler() {char data[kMaxStringLength] = {0};prctl(PR_SET_NAME, event_thread_name_.c_str(), 0, 0, 0);setpriority(PRIO_PROCESS, 0, kThreadPriorityUrgent);//一直循环poll中的数据while (!exit_threads_) {int error = Sys::poll_(poll_fds_.data(), UINT32(event_list_.size()), -1);if (error <= 0) {DLOGW("poll failed. error = %s", strerror(errno));continue;}//poll跳出阻塞说明有数据,识别数据执行相关调用的操作for (uint32_t event = 0; event < event_list_.size(); event++) {pollfd &poll_fd = poll_fds_[event];if (event_list_.at(event) == HWEvent::EXIT) {if ((poll_fd.revents & POLLIN) && (Sys::read_(poll_fd.fd, data, kMaxStringLength) > 0)) {(this->*(event_data_list_[event]).event_parser)(data);}} else {if ((poll_fd.revents & POLLPRI) &&(Sys::pread_(poll_fd.fd, data, kMaxStringLength, 0) > 0)) {(this->*(event_data_list_[event]).event_parser)(data);}}}}pthread_exit(0);return NULL;
}
//会回调到这个方法
void HWEvents::HandleVSync(char *data) {int64_t timestamp = 0;if (!strncmp(data, "VSYNC=", strlen("VSYNC="))) {timestamp = strtoll(data + strlen("VSYNC="), NULL, 0);}event_handler_->VSync(timestamp);
}} // namespace sdm上面代码有注释,大家是不是看到熟悉的poll,是不是学了马哥跨进程专题后,这个都不是事分分钟可以看的懂这个逻辑,核心的就是观察相关的vsync的fd,有数据变化了,读取,属于vsync了就触发相关的,vsync回调,这个就是hal的vsync回调
总结其实hal的vsync回调也是监听的fd而已,没啥特殊,其实你说surfaceflinger是不是也可以监听fd直接拿不就行了么。。。哈哈哈确实可以,不过毕竟各个硬件厂商实现不一样,你不能保证其他家也这样实现,所以hal就是这个另一个作用就是解耦system 的aosp部分和vendor厂商的变化部分。
但是问题又来了,请问是谁触发了这个fd有数据的啊?
kernel进行fd的数据通知:
上面hal监听的fd来自哪里?其实大家猜想肯定应该是内核,因为毕竟是硬件vsync,所以可以触碰硬件东西当然是我们的内核驱动。这里最后找到如下代码:
drivers/video/fbdev/msm/mdss_mdp_overlay.c
//中断中调用的
/* function is called in irq context should have minimum processing */
static void mdss_mdp_overlay_handle_vsync(struct mdss_mdp_ctl *ctl,ktime_t t)
{dump_stack();ATRACE_BEGIN("mdss_mdp_overlay_handle_vsync");struct msm_fb_data_type *mfd = NULL;struct mdss_overlay_private *mdp5_data = NULL;if (!ctl) {pr_err("ctl is NULL\n");return;}mfd = ctl->mfd;if (!mfd || !mfd->mdp.private1) {pr_warn("Invalid handle for vsync\n");return;}mdp5_data = mfd_to_mdp5_data(mfd);if (!mdp5_data) {pr_err("mdp5_data is NULL\n");return;}pr_debug("vsync on fb%d play_cnt=%d\n", mfd->index, ctl->play_cnt);mdp5_data->vsync_time = t;sysfs_notify_dirent(mdp5_data->vsync_event_sd);//进行的fd数据通知ATRACE_END("mdss_mdp_overlay_handle_vsync");
}
驱动是vsync是靠相关的硬件中断触发的,具体的call stack如下:
11-05 00:24:24.470 0 0 I Call trace:
11-05 00:24:24.470 0 0 I : [<ffffff91f4c8a874>] dump_backtrace+0x0/0x3a8
11-05 00:24:24.470 0 0 I : [<ffffff91f4c8a86c>] show_stack+0x14/0x1c
11-05 00:24:24.470 0 0 I : [<ffffff91f50280d0>] dump_stack+0xe4/0x11c
11-05 00:24:24.470 0 0 I : [<ffffff91f51037b4>] mdss_mdp_overlay_handle_vsync+0x20/0x1dc
11-05 00:24:24.470 0 0 I : [<ffffff91f50f26d0>] mdss_mdp_cmd_readptr_done+0x154/0x33c
11-05 00:24:24.470 0 0 I : [<ffffff91f50b9534>] mdss_mdp_isr+0x140/0x3bc
11-05 00:24:24.470 0 0 I : [<ffffff91f5164d94>] mdss_irq_dispatch+0x50/0x68
11-05 00:24:24.470 0 0 I : [<ffffff91f50c15cc>] mdss_irq_handler+0x84/0x1c0
11-05 00:24:24.470 0 0 I : [<ffffff91f4d1a92c>] handle_irq_event_percpu+0x78/0x28c
11-05 00:24:24.470 0 0 I : [<ffffff91f4d1abc8>] handle_irq_event+0x44/0x74
11-05 00:24:24.470 0 0 I : [<ffffff91f4d1e714>] handle_fasteoi_irq+0xd8/0x1b0
11-05 00:24:24.470 0 0 I : [<ffffff91f4d1a118>] __handle_domain_irq+0x7c/0xbc
11-05 00:24:24.470 0 0 I : [<ffffff91f4c811d0>] gic_handle_irq+0x80/0x144
这里通过的给内核kernel打上trace结合看如下:

是不是结合trace看起来很方便,就可以清晰知道了整个调用流程:
硬件触发 kernel中断方法,写入对于的fd
—》hal进程监听fd,然后解析回调vsync进行跨进程通讯
----》surfaceflinger收到hal跨进程调用,改变自己相关的参数,调整自己软件vsync
相关文章:
SurfaceFlinger的硬件Vsync深入分析-千里马android framework车机手机系统开发
背景: 学过或者你看过surfaceflinger相关文章同学都知道,vsync其实都是由surfaceflinger软件层面进行模拟的,但是软件模拟有可能会有误差或偏差,这个时候就需要有个硬件vsync帮忙校准。 故才会在surfaceflinger的systrace出现如下…...

力扣160. 相交链表
目录 1.解题思路2.代码实现 1.解题思路 首先分析,如果两个链表的长度不一,假设他们有交点,那么他们的最后一定是相同的,也即是后面为相同的部分,但前面不好说,而又因为长度不一又没法简便的一一对比&#…...
操作系统学习与思考
x86体系架构 x86是因特尔8086代芯片的CPU总线位数以及寄存器种类的规范,大部分操作系统都是以该规范作为基准来生产的 计算机组成 CPU,可以根据程序计数器进行取指令操作,并根据指令执行运算(加、减、乘、除)。运算所…...
C++笔记之动态数组的申请和手动实现一个简单的vector
C笔记之动态数组的申请和手动实现一个简单的vector code review! 文章目录 C笔记之动态数组的申请和手动实现一个简单的vector1.C语言中动态数组的申请与使用1.动态数组的申请使用new和delete使用std::vector 1.std::vector的底层实现2.手动实现一个简单的vector:使用一个指向…...

答题测评考试小程序的效果如何
在线答题系统是一种在线练习、考试、测评的智能答题系统,适用于企业培训、测评考试、知识竞赛、模拟考试等场景,管理员可任意组题、随机出题,答题者成功提交后,系统自动判分。 多种题目类型,两种答题模式 练习模式&a…...

树上贪心+生成树贪心:1104T3
<47.92.197.167:5283/contest/425/problem/3> 根据 n n n 奇偶性可以推断答案 合法解只需要在任何一棵生成树上构造即可 贪心肯定要在最大生成树上 然后从前往后看一条未选的边能不能选即可 #include<bits/stdc.h> using namespace std; #ifdef LOCAL#define …...
MySQL进阶之性能优化与调优技巧
数据库开发-MySQL 1. 多表查询1.1 概述1.1.2 介绍1.1.3 分类 1.2 内连接1.3 外连接1.4 子查询1.4.1 介绍1.4.2 标量子查询1.4.3 列子查询1.4.4 行子查询1.4.5 表子查询 2. 事务2.1 介绍2.2 操作2.3 四大特性 3. 索引3.1 介绍3.2 结构3.3 语法 1. 多表查询 1.1 概述 1.1.2 介绍…...
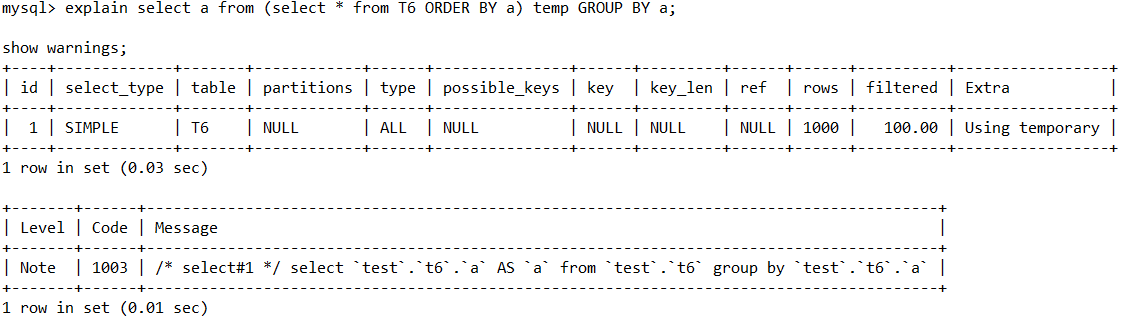
MySQL EXPLAIN查看执行计划
MySQL 执⾏计划是 MySQL 查询优化器分析 SQL 查询时⽣成的⼀份详细计划,包括表如何连 接、是否⾛索引、表扫描⾏数等。通过这份执⾏计划,我们可以分析这条 SQL 查询中存在的 问题(如是否出现全表扫描),从⽽进⾏针对优化…...
)
目标检测YOLO系列从入门到精通技术详解100篇-【目标检测】机器视觉(最终篇)
目录 知识储备 杂散光 结构光 ■ 被动测距 ■ 主动结构光 图像分类技巧 增强...
redis教程 二 redis客户端Jedis使用
文章目录 Redis的Java客户端-JedisJedis快速入门创建工程:引入依赖:建立连接测试:释放资源Jedis连接池创建Jedis的连接池改造原始代码 Redis的Java客户端-SpringDataRedis快速入门导入pom坐标配置文件测试代码 数据序列化器StringRedisTempla…...
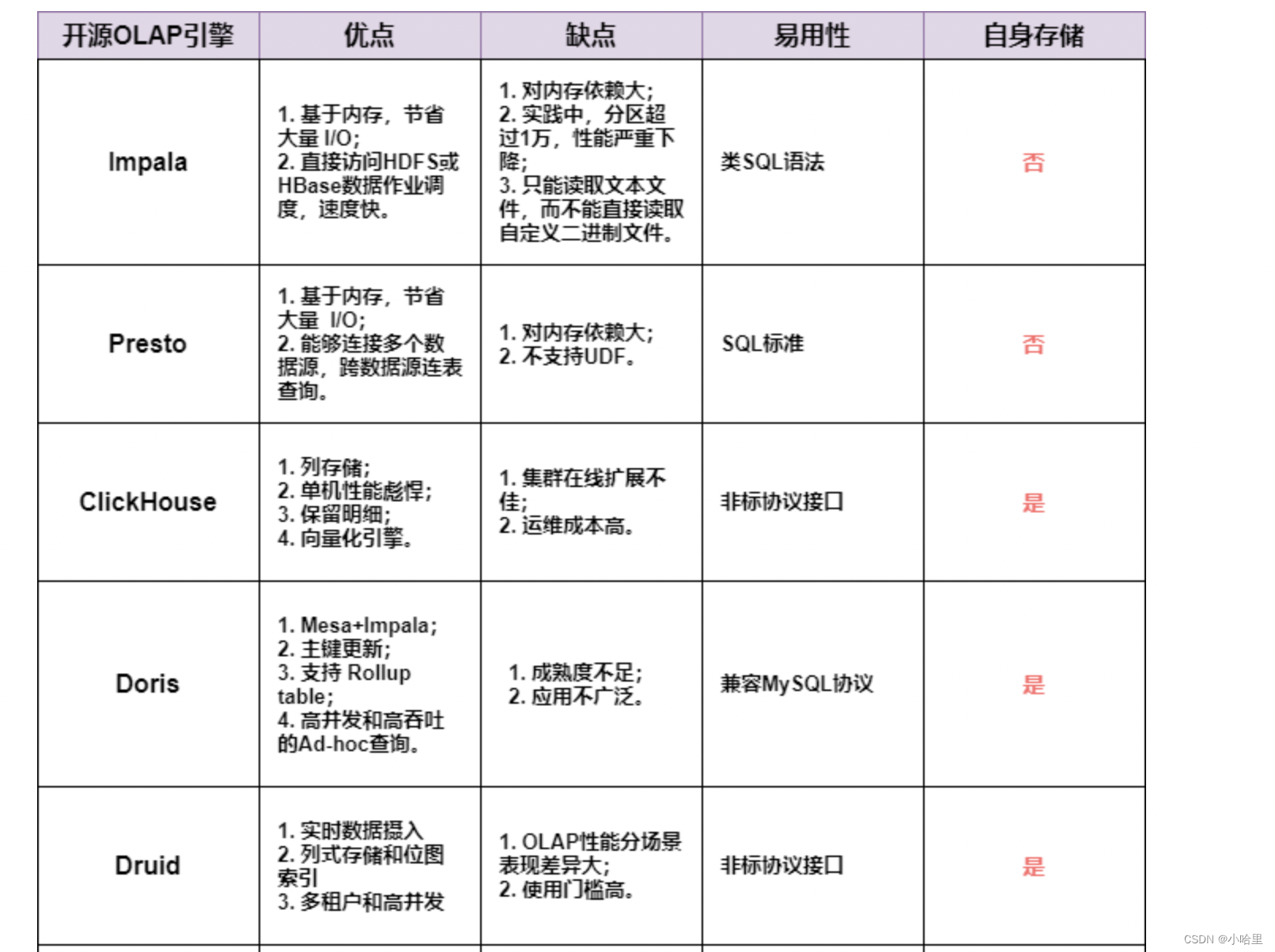
【数据开发】大数据平台架构,Hive / THive介绍
1、大数据引擎 大数据引擎是用于处理大规模数据的软件系统, 常用的大数据引擎包括Hadoop、Spark、Hive、Pig、Flink、Storm等。 其中,Hive是一种基于Hadoop的数据仓库工具,可以将结构化的数据映射到Hadoop的分布式文件系统上,并提…...
)
SOEM源码解析——ecx_init_context(初始化句柄)
0 工具准备 1.SOEM-master-1.4.0源码1 ecx_init_context函数总览 /*** @brief 初始化句柄* @param context 句柄*/ void ecx_init_context(ecx_contextt *context) {int lp;*(context->slavecount) = 0;/* clean ec_slave array */...

11.Z-Stack协议栈使用
f8wConfig.cfg文件 选择信道、设置PAN ID 选择信道 #define DEFAULT_CHANLIST 0x00000800 DEFAULT_CHANLIST 表明Zigbee模块要工作的网络,当有多个信道参数值进行或操作之后,把结果作为 DEFAULT_CHANLIST值 对于路由器、终端、协调器的意义࿱…...
设计模式—结构型模式之适配器模式
设计模式—结构型模式之适配器模式 将一个接口转换成客户希望的另一个接口,适配器模式使接口不兼容的那些类可以一起工作,适配器模式分为类结构型模式(继承)和对象结构型模式(组合)两种,前者&a…...

【LeetCode】187. 重复的DNA序列
187. 重复的DNA序列 难度:中等 题目 DNA序列 由一系列核苷酸组成,缩写为 A, C, G 和 T.。 例如,"ACGAATTCCG" 是一个 DNA序列 。 在研究 DNA 时,识别 DNA 中的重复序列非常有用。 给定一个表示 DNA序列 的字符串 …...

C++17中std::any的使用
类sdk:any提供类型安全的容器来存储任何类型的单个值。通俗地说,std::any是一个容器,可以在其中存储任何值(或用户数据),而无需担心类型安全。void*的功能有限,仅存储指针类型,被视为不安全模式。std::any可以被视为vo…...

携手ChainGPT 人工智能基础设施 波场TRON革新 Web3 版图
近日,波场TRON与 Web3 人工智能基础设施服务商 ChainGPT 正式达成合作。通过本次合作,双方将进一步推动人工智能和区块链技术的融合,在实现优势互补的同时,真正惠及日常生活。 作为一站式的加密AI中心,ChainGPT 的人工智能工具需要进行大量计算,能耗高,而波场TRON采用的创新型…...

pdfH5实现pdf预览功能
1.引入 npm install pdfh5 2.使用 <view id"pdfBox" class""></view> showPdf(url) {this.pdfh5 new Pdfh5("", {URIenable: false,zoomEnanle: true,maxZoom: 2,pdfurl: url})this.pdfh5.on("complete", function(st…...

Redis的持久化机制
多级缓存使用到了一个装饰设计模式:相当于我不影响我之前缓存本身的代码,但是我可以对我的缓存去做增强,因此多级缓存就是采用装饰模式去实现的~! 多级缓存可以采用装饰模式去重构~! Redis当中的持久化机制ÿ…...
mac装不了python3.7.6
今天发现一个很奇怪的问题 但是我一换成 conda create -n DCA python3.8.12就是成功的 这个就很奇怪...

Android 11开发避坑:为什么你的App获取的Wifi MAC地址总是变?手把手教你配置固定MAC
Android 11开发实战:彻底解决Wifi MAC地址随机化问题最近在开发一个设备管理系统时,遇到了一个棘手的问题:我们的App在Android 11设备上获取的Wifi MAC地址每次都不一样,导致基于MAC地址的设备识别功能完全失效。经过一周的深入研…...

微信小程序3D开发框架技术对比:XR-Frame与threejs-miniprogram
随着微信小程序逐步支持3D渲染与AR能力,开发者面临两个主要官方方案:自研的XR-Frame和适配Three.js的threejs-miniprogram。本文将从架构设计、渲染机制、功能集成、开发模式及适用场景等维度进行技术分析,为技术选型提供参考。一、XR-Frame&…...

别被忽悠了!2026亲测靠谱的AI论文网站|避坑精选版
2026 年学术写作工具已高度分化,千笔AI与ThouPen为全流程首选,豆包、DeepSeek 为专项强手;避坑关键:拒绝假文献、严控 AIGC 率、优先国内适配、免费试用先行。 一、TOP3 全流程首选(亲测不踩雷) 1. 千笔AI&…...

如何快速掌握Avidemux:新手完整入门指南与5个核心技巧
如何快速掌握Avidemux:新手完整入门指南与5个核心技巧 【免费下载链接】avidemux2 Avidemux2, simple video editor 项目地址: https://gitcode.com/gh_mirrors/avi/avidemux2 Avidemux是一款功能强大且完全开源的专业视频编辑工具,专为快速剪辑、…...

Autodesk Fusion 360在Linux上的技术实现与性能优化深度解析
Autodesk Fusion 360在Linux上的技术实现与性能优化深度解析 【免费下载链接】Autodesk-Fusion-360-for-Linux This is a project, where I give you a way to use Autodesk Fusion 360 on Linux! 项目地址: https://gitcode.com/gh_mirrors/au/Autodesk-Fusion-360-for-Linu…...

开源三角洲机器人Delta-Robot One:从入门到精通的创客实践指南
1. 项目概述:一个为学习而生的开源三角洲机器人如果你对机器人感兴趣,但又觉得它高深莫测、无从下手,那么Delta-Robot One(我们亲切地称它为“One”)可能就是为你量身打造的入门项目。这不是一个遥不可及的工业设备&am…...

如何让旧款Mac运行最新系统:OpenCore Legacy Patcher完整指南
如何让旧款Mac运行最新系统:OpenCore Legacy Patcher完整指南 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 想让你的老旧Mac设备重新焕发活力&a…...
如何在macOS上免费安装HSTracker:终极炉石传说套牌追踪器完整指南
如何在macOS上免费安装HSTracker:终极炉石传说套牌追踪器完整指南 【免费下载链接】HSTracker A deck tracker and deck manager for Hearthstone on macOS 项目地址: https://gitcode.com/gh_mirrors/hs/HSTracker 还在为炉石传说对局中记不住对手出牌而烦恼…...

【C++修仙录02】筑基篇:vector 使用
嗨~大家好,这里是春栀怡铃声的博客~ “做你害怕的事,然后发现,不过如此~” 目录 创建vector 遍历方法 迭代器 reserve 扩容 resize 对size 进行改变 会加值,会减值 insert size capacity empty push_back erase swap c…...

为什么你的DeepSeek沙箱被绕过了?揭秘3种未公开的上下文逃逸技术及熔断防护配置
更多请点击: https://kaifayun.com 第一章:DeepSeek沙箱安全机制概述 DeepSeek沙箱是一种面向大语言模型推理环境的轻量级隔离执行框架,旨在防止恶意代码逃逸、资源滥用及敏感数据泄露。其核心设计遵循最小权限原则与强边界隔离策略…...