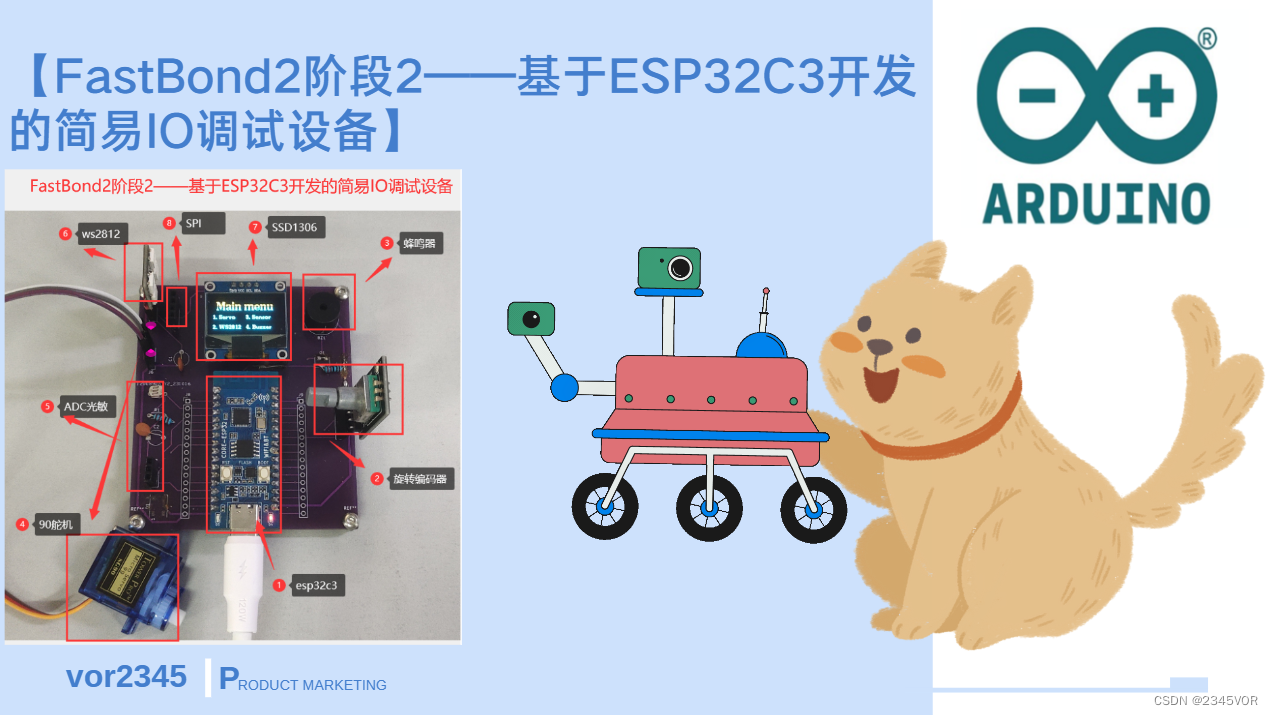
FastBond2阶段2——基于ESP32C3开发的简易IO调试设备
-
1. 项目介绍
之前买了许多国产单片机esp32c3一直在吃灰,没有发挥它的真实价值。非常感谢硬禾组织的Fastbond2活动,刚好两者经过微妙的碰撞。恰可以用于FastBond2活动主题4 - 测量仪器(单片机开发测试领域),或者用于国产ESP32C3单片机简单应用开发教育等领域。回顾立项过程,且听我娓娓道来!
1.1 立项目标
设计用户操作界面,该设备具备简单易用的操作界面,外加显示屏SSD1306和旋转编码器进行显示和控制,用户后期可进行二次开发WiFi或蓝牙连接电脑或手机监控。
1.2 立项指标
- 多种数字和模拟信号的输入输出:用户可以选择不同的输入输出模式,并通过设备的操作界面进行设置。例如,用户可以选择某个GPIO口作为模拟输入引脚,然后通过设备的操作界面设置输入的电压值,以模拟外部信号的输入,达到调试简易传感器读取和执行器输出功能。
- 支持PWM输出、舵机控制特性:用户可以选择某个GPIO口作为PWM输出引脚,并通过设备的操作界面设置PWM输出的频率和占空比。用户还可以选择某个GPIO口作为舵机控制引脚,并通过设备的操作界面设置舵机的角度。
- 因此系统具有一定的电流输出能力、信号辨识能力和显示交互功能。
-
2. 市场应用介绍
《FastBond2阶段2——基于ESP32C3开发的简易IO调试设备》是一种基于ESP32C3芯片开发的简易IO调试设备。它具有小巧、便携、功能强大等特点,可广泛应用于各个领域的电子设备调试和开发过程中。
市场应用介绍如下:
-
电子产品调试:该设备可以作为一种便携式的IO调试工具,用于电子产品的调试和测试。它支持多种接口,如GPIO、I2C、SPI、UART等,可以方便地与各种电子设备进行连接和通信,帮助工程师快速调试和验证电路功能。
-
物联网设备开发:随着物联网技术的发展,越来越多的设备需要与互联网进行连接和通信。该设备可以作为物联网设备开发过程中的工具,帮助开发者快速连接和通信,实现设备与云平台的数据传输和控制。
-
教育培训:该设备具有简单易用的特点,适合在教育培训领域使用。学生可以通过该设备学习和实践各种电子接口和通信协议的使用,提高他们的电子技术能力和创新能力。
-
嵌入式系统开发:对于嵌入式系统开发者来说,该设备可以作为一种基础工具,用于快速原型设计和验证。通过该设备,开发者可以快速连接和测试各种外设,并进行相关的软硬件开发工作。
-
DIY爱好者:该设备适合DIY爱好者使用,他们可以利用该设备进行各种创意项目的开发。无论是控制LED灯的亮灭,还是与其他传感器进行数据交互,都可以通过该设备实现,并为DIY爱好者们带来更多的乐趣和创造力。
综上所述,《FastBond2阶段2——基于ESP32C3开发的简易IO调试设备》具有广泛的市场应用前景。它可以满足不同领域的需求,为电子产品调试、物联网设备开发、教育培训、嵌入式系统开发和DIY爱好者等提供了简单、便捷、高效的解决方案。
-
3. 项目设计思路
项目地址:Scheme-it | 嵌入式快速调试设备 | DigiKey
得捷电子的Scheme-it工具融合了原理图、框图和流程图绘制等功能,支持多种格式导出。并且,得捷电子提供原理图kicad格式导出的功能,同步导出对应器件的封装,减少查找封装的麻烦。Scheme-it无需专门下载安装,在浏览器在线运行,上手速度很快。这里我非常迅速画了系统的方案框图:
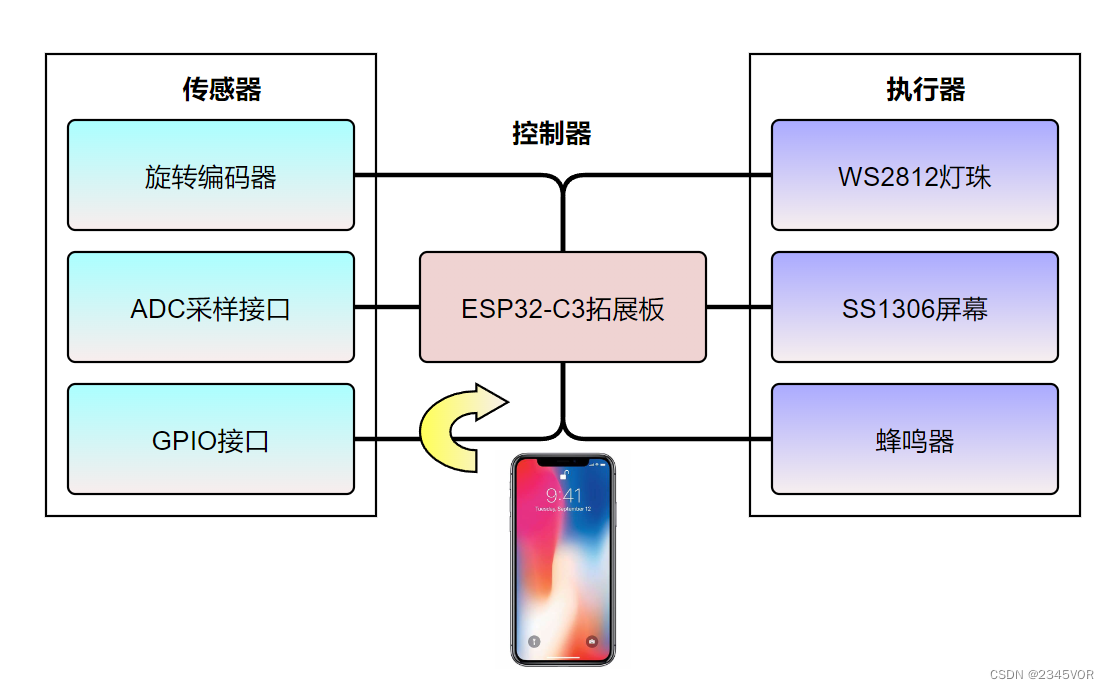
这里面的外设驱动详细内容见:【Arduino环境下驱动合宙esp32c3单片机基本外设】
-
4. 项目方案框图和原理图解释
4.1 系统设计流程图
接下来就是一步一个脚印把模块调通,最后进行解耦实验,有机会就用3D打印机打印一个外壳。如系统设计流程图所示
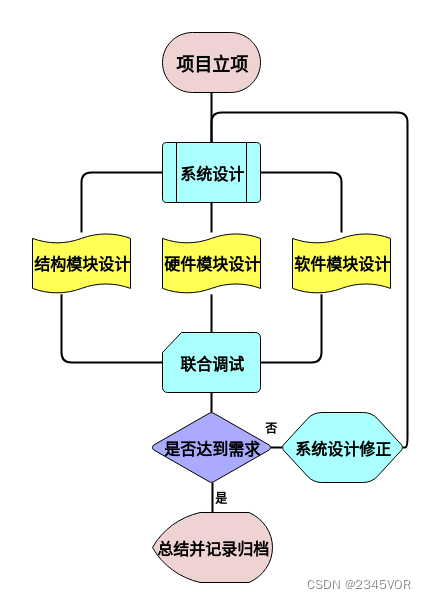
系统设计流程图是一个用于描述系统设计过程的流程图。在这个流程中,首先进行的是项目立项,然后进入系统设计阶段,包括结构设计和硬件模块设计。在硬件模块设计中,又包括硬件模块设计和软件模块设计。然后进行联合调试,如果调试成功,就进行系统设计修改,如果调试失败,就回到硬件模块设计进行更改,直到调试成功。最后,进行是总结并记录归档。
4.2 电路原理图
这里采用kicad绘制的原理图,这里面的蜂鸣器电路设计有缺陷,因此我加250Ω电阻直接飞线绕过三极管驱动蜂鸣器,我之前画过电路图(设计有诸多不合理,欢迎大家批评指正),但从来都没有打板子,这是我第一次打板子验证项目,非常感谢硬禾给机会,太感动了!
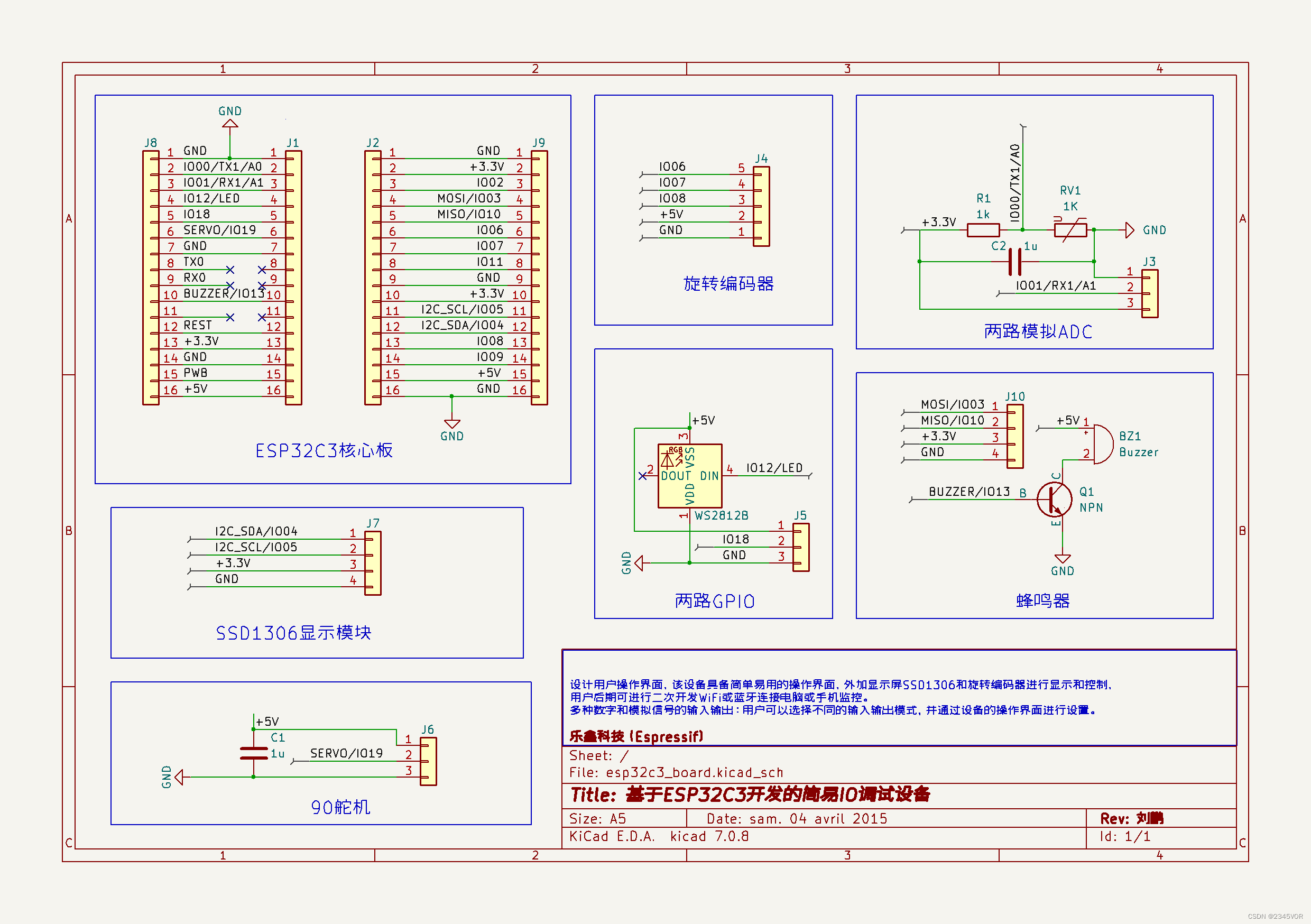
设计用户操作界面,该设备具备简单易用的操作界面,外加显示屏SSD1306和旋转编码器进行显示和控制,用户后期可进行二次开发WiFi或蓝牙连接电脑或手机监控。
多种数字和模拟信号的输入输出:用户可以选择不同的输入输出模式,并通过设备的操作界面进行设置。 引出了开发板全部可用端口,其中包括GPIO、ADC、UART、IIC、SPI端口。
这里面的外设驱动详细内容见:【Arduino环境下驱动合宙esp32c3单片机基本外设】
-
5. 设计中用到规定厂商的元器件介绍
这里采用了 乐鑫科技(Espressif)的ESP32-C3-MINI-1-N4,由于之前合宙esp32c3可以等效替代,对此采用这款合宙esp32c3开发板代替,是采用ESP32-C3-MINI-1-N4模组设计的。

ESP32C3MINI1技术规格书
ESP32-C3 系列芯片
由于项目需要达到300元包邮,所以我选购了Pi400键盘系统
期待后期有发光发热的地方叫上鹏鹏哦!
-
6. PCB绘制打板介绍及遇到的问题和解决方法
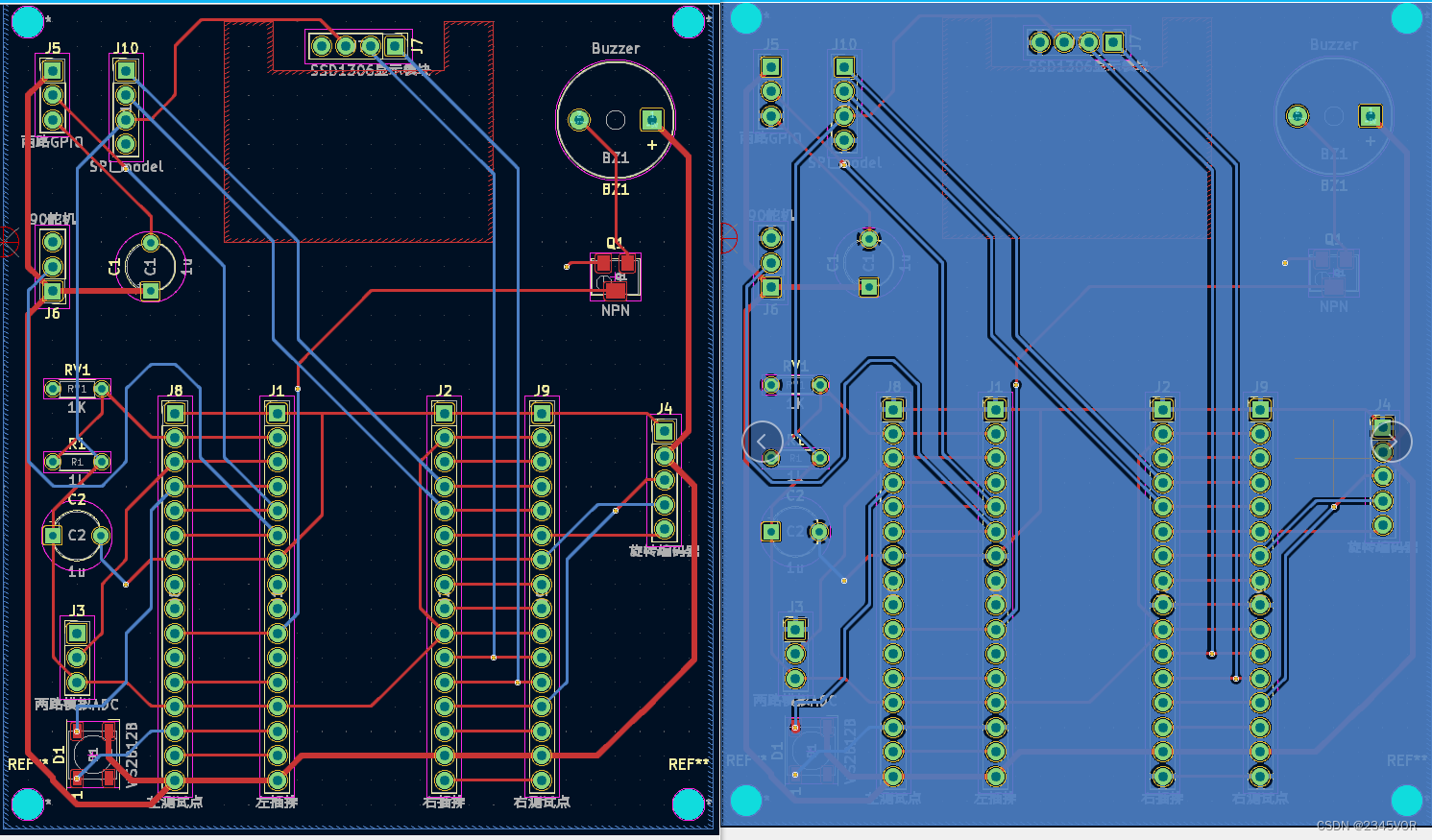
6.1 PCB板图
工程整体采用两层板结构;
底层覆铜设计,右边是覆铜效果,左边没有覆铜效果;
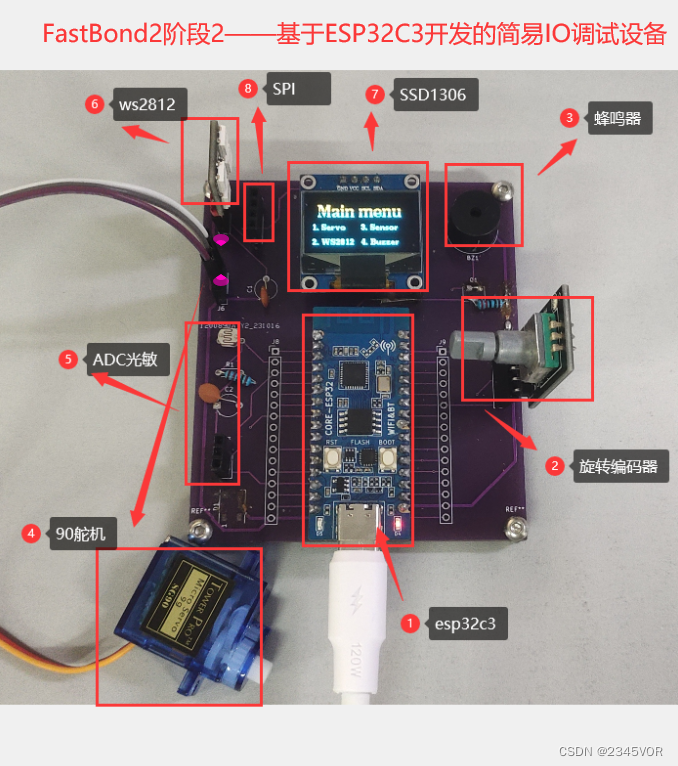
采用esp32c3单片机放在中间,底部板载USB供电,靠上设计SSD1306屏幕显示,基本外设左右排开,左边有SPI、舵机端口、ADC和WS2812。右边设计有蜂鸣器和旋转编码器,中间开发板的端口全部引出。
设计的尺寸非常小宽7.37*长8.64,四周设计了立柱。
6.2 3D封装效果图
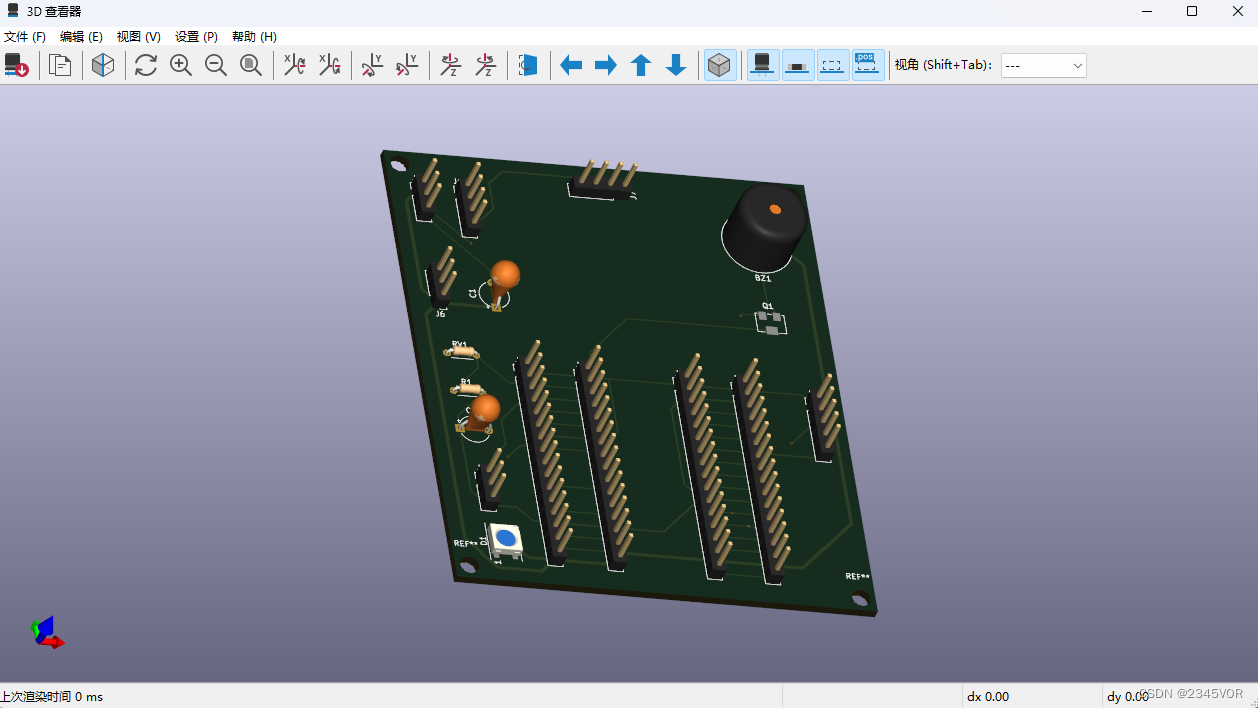
所选封装比较杂乱,偏向传统与现代工业融合
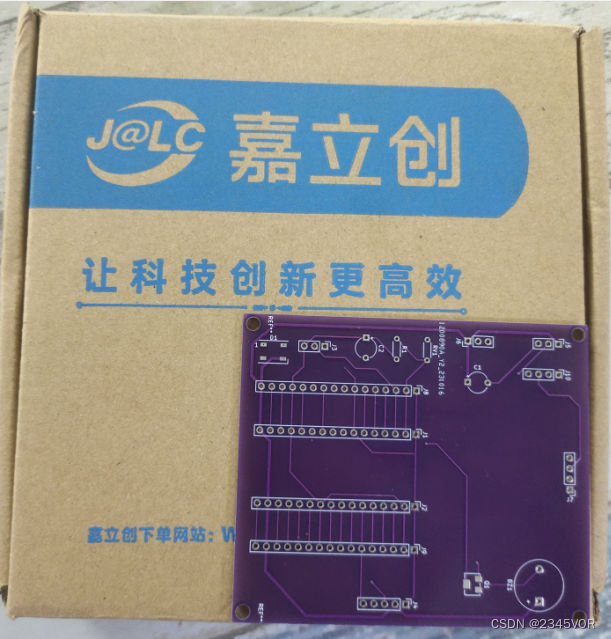
第一次下单 嘉立创返回说我没有阻焊层,修改ganber文件导出后,第二次下单工艺信息,大约5天左右就到啦!国产雄起

6.3 实物图
打板图
实物图
6.4 遇到的问题
1. 蜂鸣器驱动设计错误,解决办法:直接连接IO口,不过pwm控制效果区别不明显
2. WS2812封装对应错误,解决办法:选择引出的GPIO驱动,完美!
-
7. 关键代码及说明
总共迭代了四个版本
7.1 版本1.0
是通过ChatGPT生成的,然后结合自己开发的外设调试,搭建了基本框架,可以屏幕显示,有舵机、ws2812和ADC交互控制显示,需要安装以下5个库
- #include <U8g2lib.h>
- #include <Encoder.h>
- #include <ESP32Servo.h>
- #include <FastLED.h>
- #include <WS2812FX.h>
// #define ENCODER_DO_NOT_USE_INTERRUPTS
#include <U8g2lib.h>
#include <Encoder.h>
#include <ESP32Servo.h>
#include <FastLED.h>
#include <WS2812FX.h>
#define OLED_CLOCK 5
#define OLED_DATA 4
#define OLED_RESET U8X8_PIN_NONE
#define ENCODER_CLK 7
#define ENCODER_DT 6
#define ENCODER_SW 8
#define SERVO_PIN 19
#define LED_PIN 18
#define NUM_LEDS 4
#define SENSOR_PIN 0U8G2_SSD1306_128X64_NONAME_F_SW_I2C u8g2(U8G2_R0, /* clock=*/OLED_CLOCK, /* data=*/OLED_DATA, /* reset=*/OLED_RESET); // ESP32 Thing, pure SW emulated I2C
Encoder encoder(ENCODER_CLK, ENCODER_DT);
// ESP32PWM pwm;
Servo myservo; // create servo object to control a servo
CRGB leds[NUM_LEDS];
int currentMenu = 0;
int servoAngle = 0;
int ledColorIndex = 0;
int sensorValue = 0;
int encoderButtonState = 0;
long position = 0;
long newPos = 0;void setup() {ESP32PWM::allocateTimer(0);ESP32PWM::allocateTimer(1);ESP32PWM::allocateTimer(2);ESP32PWM::allocateTimer(3);myservo.setPeriodHertz(50); // standard 50 hz servomyservo.attach(SERVO_PIN, 1000, 2000); // attaches the servo on pin 18 to the servo objectSerial.begin(9600);u8g2.begin();u8g2.setFont(u8g2_font_ncenB14_tr);pinMode(ENCODER_SW, INPUT_PULLUP);FastLED.addLeds<WS2812B, LED_PIN, GRB>(leds, NUM_LEDS);// pwm.setPeriodHertz(50);// pwm.attachServo(SERVO_PIN);
}void loop() {u8g2.clearBuffer();switch (currentMenu) {case 0: // Main menuu8g2.setCursor(0, 20);u8g2.print("1. Servo");u8g2.setCursor(0, 40);u8g2.print("2. WS2812");u8g2.setCursor(0, 60);u8g2.print("3. Sensor");break;case 1: // Servo menu// int servoencoderValue = 0;u8g2.setCursor(0, 20);u8g2.print("Servo Angle: ");u8g2.setCursor(30, 40);u8g2.print(servoAngle);// Handle servo controlservoAngle = servoAngle + checkencoder();if (servoAngle > 180) {servoAngle = 180;} else if (servoAngle < 0) {servoAngle = 0;}myservo.write(servoAngle);break;case 2: // WS2812 menu// int LEDencoderValue = 0;u8g2.setCursor(0, 20);u8g2.print("LED Color: ");u8g2.setCursor(30, 40);u8g2.print(ledColorIndex);// Handle LED color controlledColorIndex = ledColorIndex + checkencoder();if (ledColorIndex < 0) {ledColorIndex = 0;} else if (ledColorIndex > 2) {ledColorIndex = 2;}setLedColor();break;case 3: // Sensor menuu8g2.setCursor(0, 20);u8g2.print("Sensor Value: ");u8g2.setCursor(30, 40);u8g2.print(sensorValue);// Read sensor valuesensorValue = analogRead(SENSOR_PIN);break;}u8g2.sendBuffer();// Handle menu navigationencoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {delay(50); // Debounce delayencoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {currentMenu++;if (currentMenu > 3) {currentMenu = 0;}delay(200); // Debounce delay}}
}
int checkencoder() {newPos = encoder.read();Serial.println("newPos:" + String(newPos) + "position:" + String(position));delay(1);if (newPos > position) {position = newPos;return 1;} else if (newPos < position) {position = newPos;return -1;}return 0;
}
void setLedColor() {switch (ledColorIndex) {case 0:leds[0] = CRGB::Red;leds[1] = CRGB::Red;leds[2] = CRGB::Red;leds[3] = CRGB::Red;break;case 1:leds[0] = CRGB::Green;leds[1] = CRGB::Green;leds[2] = CRGB::Green;leds[3] = CRGB::Green;break;case 2:leds[0] = CRGB::Blue;leds[1] = CRGB::Blue;leds[2] = CRGB::Blue;leds[3] = CRGB::Blue;break;}FastLED.show();
}
7.2 版本1.1
增加了蜂鸣器控制,设计四级菜单,WS2812由三种颜色怎加到10种,解决旋转编码器无法减法控制,添加按键返回功能
// #define ENCODER_DO_NOT_USE_INTERRUPTS
#include <U8g2lib.h>
#include <Encoder.h>
#include <ESP32Servo.h>
#include <FastLED.h>
#include <WS2812FX.h>
#define OLED_CLOCK 5
#define OLED_DATA 4
#define OLED_RESET U8X8_PIN_NONE
#define ENCODER_CLK 7
#define ENCODER_DT 6
#define ENCODER_SW 8
#define SERVO_PIN 19
#define LED_PIN 18
#define NUM_LEDS 4
#define SENSOR_PIN 0
#define SENSOR_PIN2 1
#define BUZZER 13U8G2_SSD1306_128X64_NONAME_F_SW_I2C u8g2(U8G2_R0, /* clock=*/OLED_CLOCK, /* data=*/OLED_DATA, /* reset=*/OLED_RESET); // ESP32 Thing, pure SW emulated I2C
// 创建Encoder对象
Encoder myEncoder(ENCODER_CLK, ENCODER_DT);
// ESP32PWM pwm;
Servo myservo; // create servo object to control a servo
CRGB leds[NUM_LEDS];
int currentMenu = 0;
int servoAngle = 0;
int ledColorIndex = 0;
int sensorValue = 0;
int sensorValue2 = 0;
int BuzzerValue = 128;
int encoderButtonState = 0;
long position = 0;
long newPos = 0;
long oldPosition = 0;
int increment = 0;
int ws = 0;
void setup() {myservo.setPeriodHertz(50); // standard 50 hz servomyservo.attach(SERVO_PIN, 1000, 2000); // attaches the servo on pin 18 to the servo objectSerial.begin(9600);u8g2.begin();u8g2.setFont(u8g2_font_ncenB14_tr);pinMode(ENCODER_SW, INPUT_PULLUP);pinMode(ENCODER_CLK, INPUT_PULLUP);pinMode(ENCODER_DT, INPUT_PULLUP);pinMode(BUZZER, OUTPUT);FastLED.addLeds<WS2812, LED_PIN, GRB>(leds, NUM_LEDS);for (int i = 0; i < NUM_LEDS; i++) {leds[i] = getColor(-1);}FastLED.show();// pwm.setPeriodHertz(50);// pwm.attachServo(SERVO_PIN);
}void loop() {u8g2.clearBuffer();switch (currentMenu) {case 0: // Main menuu8g2.setCursor(30, 20);u8g2.print("Main menu");u8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(0, 40);u8g2.print("1. Servo");u8g2.setCursor(0, 60);u8g2.print("2. WS2812");u8g2.setCursor(64, 40);u8g2.print("3. Sensor");u8g2.setCursor(64, 60);u8g2.print("4. Buzzer");break;case 1: // Servo menu// int servoencoderValue = 0;u8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Servo Angle: ");u8g2.setCursor(30, 40);u8g2.print(servoAngle);u8g2.sendBuffer();while (1) {if (checkencoder() == true) {setservo();increment = 0;}if (checkswitch() == true) {break;}}break;case 2: // WS2812 menu// int LEDencoderValue = 0;u8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("LED Color: ");u8g2.setCursor(30, 40);u8g2.print(ledColorIndex);u8g2.sendBuffer();// Handle LED color controlwhile (1) {if (checkencoder() == true) {setLedColor();increment = 0;}if (checkswitch() == true) {break;}}break;case 3: // Sensor menuu8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(10, 30);u8g2.print("Sensor1: ");u8g2.setCursor(64, 30);u8g2.print(sensorValue);u8g2.setCursor(10, 60);u8g2.print("Sensor2: ");u8g2.setCursor(64, 60);u8g2.print(sensorValue2);// Read sensor valuesensorValue = analogRead(SENSOR_PIN);sensorValue2 = analogRead(SENSOR_PIN2);break;case 4: // Buzzer menuu8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Buzzer Value: ");u8g2.setCursor(30, 40);u8g2.print(BuzzerValue);// Handle Buzzer controlwhile (1) {if (checkencoder() == true) {setbuzzer();increment = 0;}if (checkswitch() == true) {break;}}break;}increment = 0;u8g2.sendBuffer();// Handle menu navigationif (checkswitch() == true) {currentMenu++;if (currentMenu > 4) {currentMenu = 0;}delay(200); // Debounce delay}
}
bool checkencoder() {long newPosition = myEncoder.read();if (newPosition != oldPosition) {// Serial.println(newPosition + String(";") + oldPosition);increment = newPosition - oldPosition;oldPosition = newPosition;return true;}return false;
}
bool checkswitch() {encoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {delay(50); // Debounce delayencoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {return true;} else {return false;}} else {return false;}
}
void setLedColor() {ledColorIndex = ledColorIndex + increment;if (ledColorIndex < 0) {ledColorIndex = 0;} else if (ledColorIndex > 10) {ledColorIndex = 10;}u8g2.setCursor(30, 40);u8g2.print(ledColorIndex);u8g2.sendBuffer();for (int i = 0; i < NUM_LEDS; i++) {leds[i] = getColor(ledColorIndex);}FastLED.show();delay(1);
}
void setservo() {servoAngle = servoAngle + increment*3;if (servoAngle > 180) {servoAngle = 180;} else if (servoAngle < 0) {servoAngle = 0;}u8g2.setCursor(30, 40);u8g2.print(servoAngle);u8g2.sendBuffer();myservo.write(servoAngle);
}void setbuzzer() {BuzzerValue = BuzzerValue + increment*8;if (BuzzerValue > 255) {BuzzerValue = 255;} else if (BuzzerValue < 0) {BuzzerValue = 0;}u8g2.setCursor(30, 40);u8g2.print(BuzzerValue);u8g2.sendBuffer();analogWrite(BUZZER, BuzzerValue);
}CRGB getColor(int index) {switch (index) {case 0:return CRGB::Red;case 1:return CRGB::Green;case 2:return CRGB::Blue;case 3:return CRGB::Yellow;case 4:return CRGB::Magenta;case 5:return CRGB::Cyan;case 6:return CRGB::White;case 7:return CRGB::Purple;case 8:return CRGB::Orange;case 9:return CRGB::Pink;default:return CRGB::Black;}
}
7.3 版本1.2
增加了蓝牙交互,设计五级菜单,通过蓝牙上传设备状态信息,并且可接收手机端数据,但未完成控制设备。值得注意这个版本最稳定
// #define ENCODER_DO_NOT_USE_INTERRUPTS
#include <U8g2lib.h>
#include <Encoder.h>
#include <ESP32Servo.h>
#include <FastLED.h>
#include <WS2812FX.h>
#include <BLEDevice.h>
#include <BLEServer.h>
#include <BLEUtils.h>
#include <BLE2902.h>
#define OLED_CLOCK 5
#define OLED_DATA 4
#define OLED_RESET U8X8_PIN_NONE
#define ENCODER_CLK 7
#define ENCODER_DT 6
#define ENCODER_SW 8
#define SERVO_PIN 19
#define LED_PIN 18
#define NUM_LEDS 4
#define SENSOR_PIN 0
#define SENSOR_PIN2 1
#define BUZZER 13
#define SERVICE_UUID "6E400001-B5A3-F393-E0A9-E50E24DCCA9E" // UART service UUID
#define CHARACTERISTIC_UUID_RX "6E400002-B5A3-F393-E0A9-E50E24DCCA9E"
#define CHARACTERISTIC_UUID_TX "6E400003-B5A3-F393-E0A9-E50E24DCCA9E"
//创建Bluetooth对象
BLECharacteristic *pCharacteristic;
//创建SSD1306屏幕对象
U8G2_SSD1306_128X64_NONAME_F_SW_I2C u8g2(U8G2_R0, /* clock=*/OLED_CLOCK, /* data=*/OLED_DATA, /* reset=*/OLED_RESET); // ESP32 Thing, pure SW emulated I2C
// 创建Encoder对象
Encoder myEncoder(ENCODER_CLK, ENCODER_DT);
// ESP32PWM pwm;
Servo myservo; // create servo object to control a servo
CRGB leds[NUM_LEDS];
int currentMenu = 0;
int servoAngle = 0;
int ledColorIndex = 0;
int sensorValue = 0;
int sensorValue2 = 0;
int BuzzerValue = 128;
int encoderButtonState = 0;
long position = 0;
long newPos = 0;
long oldPosition = 0;
int increment = 0;
bool deviceConnected = false;
char BLEbuf[256] = { 0 };
uint32_t cnt = 0;
String message_c;
char *message;
// const char *message1;
class MyServerCallbacks : public BLEServerCallbacks {void onConnect(BLEServer *pServer) {deviceConnected = true;};void onDisconnect(BLEServer *pServer) {deviceConnected = false;}
};class MyCallbacks : public BLECharacteristicCallbacks {void onWrite(BLECharacteristic *pCharacteristic) {std::string rxValue = pCharacteristic->getValue();if (rxValue.length() > 0) {Serial.print("------>Received Value: ");for (int i = 0; i < rxValue.length(); i++) {Serial.print(rxValue[i]);}Serial.println();}}
};void setup() {myservo.setPeriodHertz(50); // standard 50 hz servomyservo.attach(SERVO_PIN, 1000, 2000); // attaches the servo on pin 18 to the servo objectSerial.begin(115200);u8g2.begin();u8g2.clearDisplay();pinMode(ENCODER_SW, INPUT_PULLUP);pinMode(ENCODER_CLK, INPUT_PULLUP);pinMode(ENCODER_DT, INPUT_PULLUP);pinMode(BUZZER, OUTPUT);FastLED.addLeds<WS2812, LED_PIN, GRB>(leds, NUM_LEDS);for (int i = 0; i < NUM_LEDS; i++) {leds[i] = getColor(-1);}FastLED.show();// Create the BLE DeviceBLEDevice::init("ESP32 BLE vor");// 创建蓝牙服务器BLEServer *pServer = BLEDevice::createServer();pServer->setCallbacks(new MyServerCallbacks());// // 创建广播服务的UUIDBLEService *pService = pServer->createService(SERVICE_UUID);// 创建广播服务的UUIDpCharacteristic = pService->createCharacteristic(CHARACTERISTIC_UUID_TX, BLECharacteristic::PROPERTY_NOTIFY);pCharacteristic->addDescriptor(new BLE2902());BLECharacteristic *pCharacteristic = pService->createCharacteristic(CHARACTERISTIC_UUID_RX, BLECharacteristic::PROPERTY_WRITE);pCharacteristic->setCallbacks(new MyCallbacks());// 开始蓝牙服务pService->start();// 开始广播pServer->getAdvertising()->start();Serial.println("Waiting a client connection to notify...");
}void loop() {u8g2.clearBuffer();switch (currentMenu) {case 0: // Main menuu8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(7, 22);u8g2.print("Main menu");u8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(0, 40);u8g2.print("1. Servo");u8g2.setCursor(0, 60);u8g2.print("2. WS2812");u8g2.setCursor(64, 40);u8g2.print("3. Sensor");u8g2.setCursor(64, 60);u8g2.print("4. Buzzer");break;case 1: // Servo menu// int servoencoderValue = 0;u8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Servo Angle: ");u8g2.setCursor(30, 40);u8g2.print(servoAngle);u8g2.sendBuffer();while (1) {if (checkencoder() == true) {setservo();increment = 0;}if (checkswitch() == true) {break;}}break;case 2: // WS2812 menu// int LEDencoderValue = 0;u8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("LED Color: ");u8g2.setCursor(30, 40);u8g2.print(ledColorIndex);u8g2.sendBuffer();// Handle LED color controlwhile (1) {if (checkencoder() == true) {setLedColor();increment = 0;}if (checkswitch() == true) {break;}}break;case 3: // Sensor menuu8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(10, 30);u8g2.print("Sensor1: ");u8g2.setCursor(64, 30);u8g2.print(sensorValue);u8g2.setCursor(10, 60);u8g2.print("Sensor2: ");u8g2.setCursor(64, 60);u8g2.print(sensorValue2);// Read sensor valuesensorValue = analogRead(SENSOR_PIN);sensorValue2 = analogRead(SENSOR_PIN2);break;case 4: // Buzzer menuu8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Buzzer Value: ");u8g2.setCursor(30, 40);u8g2.print(BuzzerValue);// Handle Buzzer controlwhile (1) {if (checkencoder() == true) {setbuzzer();increment = 0;}if (checkswitch() == true) {break;}}break;case 5: // Blue uartu8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Blue uart : ");u8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(0, 40);u8g2.print(BuzzerValue);// Handle Buzzer controlwhile (1) {setbluetooth();if (checkswitch() == true) {break;}}break;default:break;}increment = 0;u8g2.sendBuffer();// Handle menu navigationif (checkswitch() == true) {currentMenu++;if (currentMenu > 5) {currentMenu = 0;}delay(200); // Debounce delay}
}
bool checkencoder() {long newPosition = myEncoder.read();if (newPosition != oldPosition) {// Serial.println(newPosition + String(";") + oldPosition);increment = newPosition - oldPosition;oldPosition = newPosition;return true;}return false;
}
bool checkswitch() {encoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {delay(50); // Debounce delayencoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {return true;} else {return false;}} else {return false;}
}
void setLedColor() {ledColorIndex = ledColorIndex + increment;if (ledColorIndex < 0) {ledColorIndex = 0;} else if (ledColorIndex > 10) {ledColorIndex = 10;}u8g2.setCursor(30, 40);u8g2.print(ledColorIndex);u8g2.sendBuffer();for (int i = 0; i < NUM_LEDS; i++) {leds[i] = getColor(ledColorIndex);}FastLED.show();delay(1);
}
void setservo() {servoAngle = servoAngle + increment * 3;if (servoAngle > 180) {servoAngle = 180;} else if (servoAngle < 0) {servoAngle = 0;}u8g2.setCursor(30, 40);u8g2.print(servoAngle);u8g2.sendBuffer();myservo.write(servoAngle);
}void setbuzzer() {BuzzerValue = BuzzerValue + increment * 8;if (BuzzerValue > 255) {BuzzerValue = 255;} else if (BuzzerValue < 0) {BuzzerValue = 0;}u8g2.setCursor(30, 40);u8g2.print(BuzzerValue);u8g2.sendBuffer();analogWrite(BUZZER, BuzzerValue);
}void setbluetooth() {if (deviceConnected) { //设备连接后,每秒钟发送txValue。memset(BLEbuf, 0, 32);message_c = "s "+String(servoAngle)+" w"+String(ledColorIndex)+" s"+String(analogRead(SENSOR_PIN))+"s"+String(analogRead(SENSOR_PIN2))+"b"+String(BuzzerValue)+"\n";char* p = const_cast<char*>(message_c.c_str());memcpy(BLEbuf, p, 32);pCharacteristic->setValue(BLEbuf);pCharacteristic->notify(); // Send the value to the app!Serial.print("*** Sent Value: ");Serial.print(BLEbuf);Serial.println(" ***");// sensorValue = analogRead(SENSOR_PIN);// sensorValue2 = analogRead(SENSOR_PIN2);// memset(BLEbuf, 0, 256);// // sprintf(message, "S%dW%dS%dS%dB%d", servoAngle, ledColorIndex, sensorValue, sensorValue2, BuzzerValue);// sprintf(message, "S%dW%d", servoAngle, ledColorIndex);// // message_c = message;// // char* p = const_cast<char*>(message.c_str());// // message1 = message;// memcpy(BLEbuf, message, 256);// // memcpy(BLEbuf, message_c, 32);// pCharacteristic->setValue(BLEbuf);// pCharacteristic->notify(); // Send the value to the app!// delay(10);u8g2.setCursor(0, 40);u8g2.print(BLEbuf);// // u8g2.setCursor(0, 60);// // u8g2.print(message_c.substring(15, 32));u8g2.sendBuffer();// Serial.println("Sent Value:" + String(BLEbuf));delay(100);}
}CRGB getColor(int index) {switch (index) {case 0:return CRGB::Red;case 1:return CRGB::Green;case 2:return CRGB::Blue;case 3:return CRGB::Yellow;case 4:return CRGB::Magenta;case 5:return CRGB::Cyan;case 6:return CRGB::White;case 7:return CRGB::Purple;case 8:return CRGB::Orange;case 9:return CRGB::Pink;default:return CRGB::Black;}
}
7.4 版本1.3
设计了两个线程,完成了实时的蓝牙交互,不过ws2812控制不稳定。推荐版本1.2
// #define ENCODER_DO_NOT_USE_INTERRUPTS
#include <U8g2lib.h>
#include <Encoder.h>
#include <ESP32Servo.h>
#include <FastLED.h>
#include <WS2812FX.h>
#include <BLEDevice.h>
#include <BLEServer.h>
#include <BLEUtils.h>
#include <BLE2902.h>
#define OLED_CLOCK 5
#define OLED_DATA 4
#define OLED_RESET U8X8_PIN_NONE
#define ENCODER_CLK 7
#define ENCODER_DT 6
#define ENCODER_SW 8
#define SERVO_PIN 19
#define LED_PIN 18
#define NUM_LEDS 4
#define SENSOR_PIN 0
#define SENSOR_PIN2 1
#define BUZZER 13
#define SERVICE_UUID "6E400001-B5A3-F393-E0A9-E50E24DCCA9E" // UART service UUID
#define CHARACTERISTIC_UUID_RX "6E400002-B5A3-F393-E0A9-E50E24DCCA9E"
#define CHARACTERISTIC_UUID_TX "6E400003-B5A3-F393-E0A9-E50E24DCCA9E"
//创建Bluetooth对象
BLECharacteristic *pCharacteristic;
//创建SSD1306屏幕对象
U8G2_SSD1306_128X64_NONAME_F_SW_I2C u8g2(U8G2_R0, /* clock=*/OLED_CLOCK, /* data=*/OLED_DATA, /* reset=*/OLED_RESET); // ESP32 Thing, pure SW emulated I2C
// 创建Encoder对象
Encoder myEncoder(ENCODER_CLK, ENCODER_DT);
// ESP32PWM pwm;
Servo myservo; // create servo object to control a servo
CRGB leds[NUM_LEDS];
int currentMenu = 0;
int servoAngle = 0;
int ledColorIndex = 0;
int sensorValue = 0;
int sensorValue2 = 0;
int BuzzerValue = 128;
int encoderButtonState = 0;
long position = 0;
long newPos = 0;
long oldPosition = 0;
int increment = 0;
bool deviceConnected = false;
char BLEbuf[256] = { 0 };
uint32_t cnt = 0;
String message_c;
char *message;
// const char *message1;
class MyServerCallbacks : public BLEServerCallbacks {void onConnect(BLEServer *pServer) {deviceConnected = true;};void onDisconnect(BLEServer *pServer) {deviceConnected = false;}
};class MyCallbacks : public BLECharacteristicCallbacks {void onWrite(BLECharacteristic *pCharacteristic) {std::string rxValue = pCharacteristic->getValue();if (rxValue.length() > 0) {Serial.print("------>Received Value: ");for (int i = 0; i < rxValue.length(); i++) {Serial.print(rxValue[i]);}Serial.println();}}
};void appCpuLoop(void *pvParameters) {while (true) {if (currentMenu != 5) {memset(BLEbuf, 0, 32);message_c = "s " + String(servoAngle) + "w" + String(ledColorIndex) + " s" + String(analogRead(SENSOR_PIN)) + "s" + String(analogRead(SENSOR_PIN2)) + "b" + String(BuzzerValue) + "\r\n";char *p = const_cast<char *>(message_c.c_str());memcpy(BLEbuf, p, 32);pCharacteristic->setValue(BLEbuf);pCharacteristic->notify(); // Send the value to the app!Serial.print("*** Sent Value: ");Serial.print(BLEbuf);Serial.println(" ***");delay(700);}delay(300);}vTaskDelete(NULL);
}void setup() {myservo.setPeriodHertz(50); // standard 50 hz servomyservo.attach(SERVO_PIN, 1000, 2000); // attaches the servo on pin 18 to the servo objectSerial.begin(115200);u8g2.begin();u8g2.clearDisplay();pinMode(ENCODER_SW, INPUT_PULLUP);pinMode(ENCODER_CLK, INPUT_PULLUP);pinMode(ENCODER_DT, INPUT_PULLUP);pinMode(BUZZER, OUTPUT);FastLED.addLeds<WS2812, LED_PIN, GRB>(leds, NUM_LEDS);for (int i = 0; i < NUM_LEDS; i++) {leds[i] = getColor(-1);}FastLED.show();// Create the BLE DeviceBLEDevice::init("ESP32 BLE vor");// 创建蓝牙服务器BLEServer *pServer = BLEDevice::createServer();pServer->setCallbacks(new MyServerCallbacks());// // 创建广播服务的UUIDBLEService *pService = pServer->createService(SERVICE_UUID);// 创建广播服务的UUIDpCharacteristic = pService->createCharacteristic(CHARACTERISTIC_UUID_TX, BLECharacteristic::PROPERTY_NOTIFY);pCharacteristic->addDescriptor(new BLE2902());BLECharacteristic *pCharacteristic = pService->createCharacteristic(CHARACTERISTIC_UUID_RX, BLECharacteristic::PROPERTY_WRITE);pCharacteristic->setCallbacks(new MyCallbacks());// 开始蓝牙服务pService->start();// 开始广播pServer->getAdvertising()->start();Serial.println("Waiting a client connection to notify...");xTaskCreatePinnedToCore(appCpuLoop, //具体实现的函数"APP_CPU_LOOP", //任务名称8192, //堆栈大小NULL, //输入参数1, //任务优先级NULL, //1 //核心 0\1);
}void loop() {u8g2.clearBuffer();switch (currentMenu) {case 0: // Main menuu8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(7, 22);u8g2.print("Main menu");u8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(0, 40);u8g2.print("1. Servo");u8g2.setCursor(0, 60);u8g2.print("2. WS2812");u8g2.setCursor(64, 40);u8g2.print("3. Sensor");u8g2.setCursor(64, 60);u8g2.print("4. Buzzer");break;case 1: // Servo menu// int servoencoderValue = 0;u8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Servo Angle: ");u8g2.setCursor(30, 40);u8g2.print(servoAngle);u8g2.sendBuffer();while (1) {if (checkencoder() == true) {setservo();increment = 0;}if (checkswitch() == true) {break;}}break;case 2: // WS2812 menu// int LEDencoderValue = 0;u8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("LED Color: ");u8g2.setCursor(30, 40);u8g2.print(ledColorIndex);u8g2.sendBuffer();// Handle LED color controlwhile (1) {if (checkencoder() == true) {setLedColor();increment = 0;}if (checkswitch() == true) {break;}}break;case 3: // Sensor menuu8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(10, 30);u8g2.print("Sensor1: ");u8g2.setCursor(64, 30);u8g2.print(sensorValue);u8g2.setCursor(10, 60);u8g2.print("Sensor2: ");u8g2.setCursor(64, 60);u8g2.print(sensorValue2);// Read sensor valuesensorValue = analogRead(SENSOR_PIN);sensorValue2 = analogRead(SENSOR_PIN2);break;case 4: // Buzzer menuu8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Buzzer Value: ");u8g2.setCursor(30, 40);u8g2.print(BuzzerValue);// Handle Buzzer controlwhile (1) {if (checkencoder() == true) {setbuzzer();increment = 0;}if (checkswitch() == true) {break;}}break;case 5: // Blue uartu8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Blue uart : ");u8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(0, 40);u8g2.print(BuzzerValue);// Handle Buzzer controlwhile (1) {setbluetooth();if (checkswitch() == true) {break;}}break;default:break;}increment = 0;u8g2.sendBuffer();// Handle menu navigationif (checkswitch() == true) {currentMenu++;if (currentMenu > 5) {currentMenu = 0;}delay(200); // Debounce delay}
}
bool checkencoder() {long newPosition = myEncoder.read();if (newPosition != oldPosition) {// Serial.println(newPosition + String(";") + oldPosition);increment = newPosition - oldPosition;oldPosition = newPosition;return true;}return false;
}
bool checkswitch() {encoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {delay(50); // Debounce delayencoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {return true;} else {return false;}} else {return false;}
}
void setLedColor() {ledColorIndex = ledColorIndex + increment;if (ledColorIndex < 0) {ledColorIndex = 0;} else if (ledColorIndex > 10) {ledColorIndex = 10;}u8g2.setCursor(30, 40);u8g2.print(ledColorIndex);u8g2.sendBuffer();for (int i = 0; i < NUM_LEDS; i++) {leds[i] = getColor(ledColorIndex);}FastLED.show();delay(1);
}
void setservo() {servoAngle = servoAngle + increment * 3;if (servoAngle > 180) {servoAngle = 180;} else if (servoAngle < 0) {servoAngle = 0;}u8g2.setCursor(30, 40);u8g2.print(servoAngle);u8g2.sendBuffer();myservo.write(servoAngle);
}void setbuzzer() {BuzzerValue = BuzzerValue + increment * 8;if (BuzzerValue > 255) {BuzzerValue = 255;} else if (BuzzerValue < 0) {BuzzerValue = 0;}u8g2.setCursor(30, 40);u8g2.print(BuzzerValue);u8g2.sendBuffer();analogWrite(BUZZER, BuzzerValue);
}void setbluetooth() {if (deviceConnected) { //设备连接后,每秒钟发送txValue。memset(BLEbuf, 0, 32);message_c = "s " + String(servoAngle) + "w" + String(ledColorIndex) + " s" + String(analogRead(SENSOR_PIN)) + "s" + String(analogRead(SENSOR_PIN2)) + "b" + String(BuzzerValue) + "\r\n";char *p = const_cast<char *>(message_c.c_str());memcpy(BLEbuf, p, 32);pCharacteristic->setValue(BLEbuf);pCharacteristic->notify(); // Send the value to the app!Serial.print("*** Sent Value: ");Serial.print(BLEbuf);Serial.println(" ***");// sensorValue = analogRead(SENSOR_PIN);// sensorValue2 = analogRead(SENSOR_PIN2);// memset(BLEbuf, 0, 256);// // sprintf(message, "S%dW%dS%dS%dB%d", servoAngle, ledColorIndex, sensorValue, sensorValue2, BuzzerValue);// sprintf(message, "S%dW%d", servoAngle, ledColorIndex);// // message_c = message;// // char* p = const_cast<char*>(message.c_str());// // message1 = message;// memcpy(BLEbuf, message, 256);// // memcpy(BLEbuf, message_c, 32);// pCharacteristic->setValue(BLEbuf);// pCharacteristic->notify(); // Send the value to the app!// delay(10);u8g2.setCursor(0, 40);u8g2.print(BLEbuf);// // u8g2.setCursor(0, 60);// // u8g2.print(message_c.substring(15, 32));u8g2.sendBuffer();// Serial.println("Sent Value:" + String(BLEbuf));delay(100);}
}CRGB getColor(int index) {switch (index) {case 0:return CRGB::Red;case 1:return CRGB::Green;case 2:return CRGB::Blue;case 3:return CRGB::Yellow;case 4:return CRGB::Magenta;case 5:return CRGB::Cyan;case 6:return CRGB::White;case 7:return CRGB::Purple;case 8:return CRGB::Orange;case 9:return CRGB::Pink;default:return CRGB::Black;}
}
-
8. 功能展示及说明
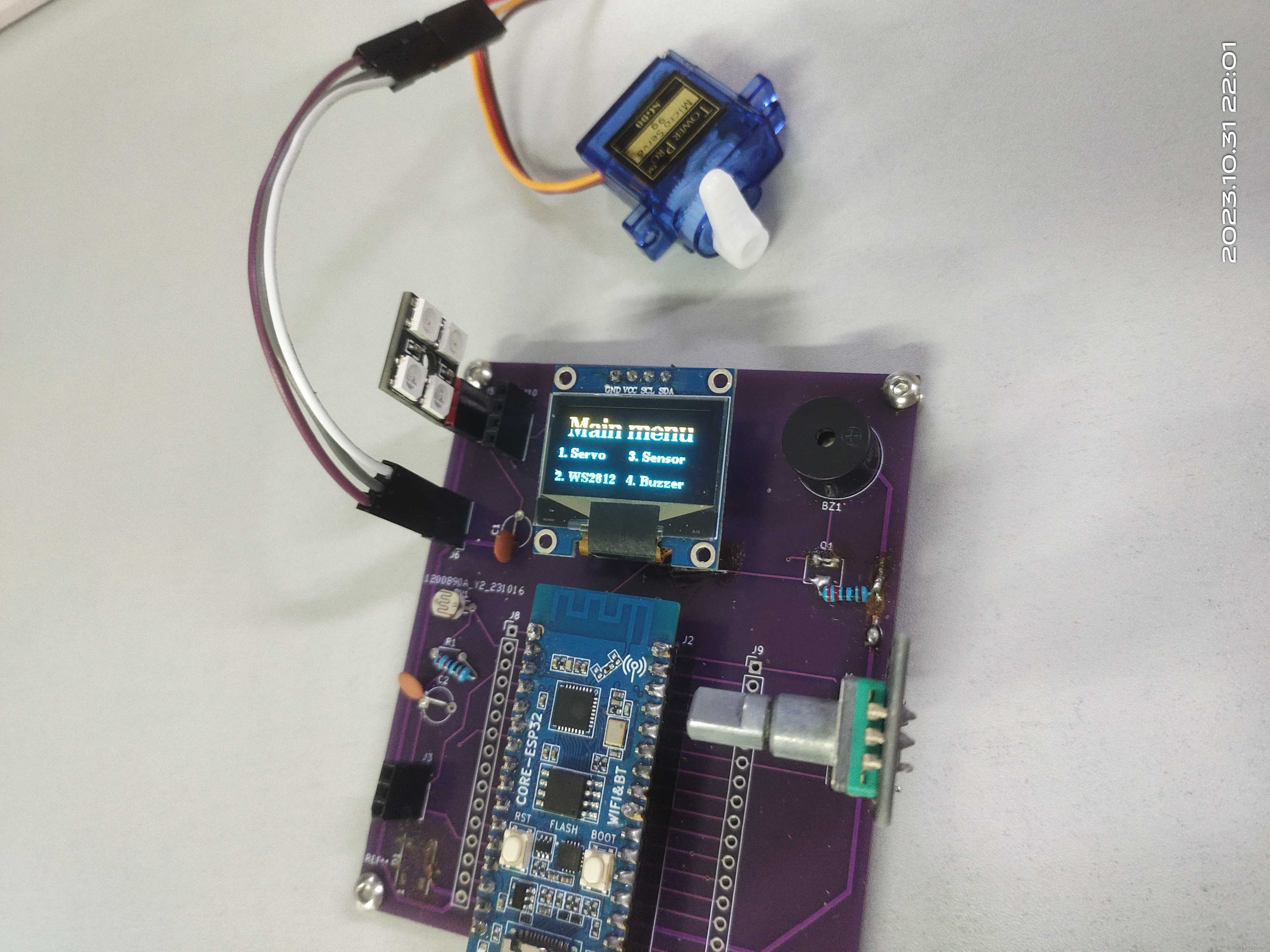
8.1 主菜单显示
主菜单显示,所有设备初始化,舵机归位,灯灭,蜂鸣器静音
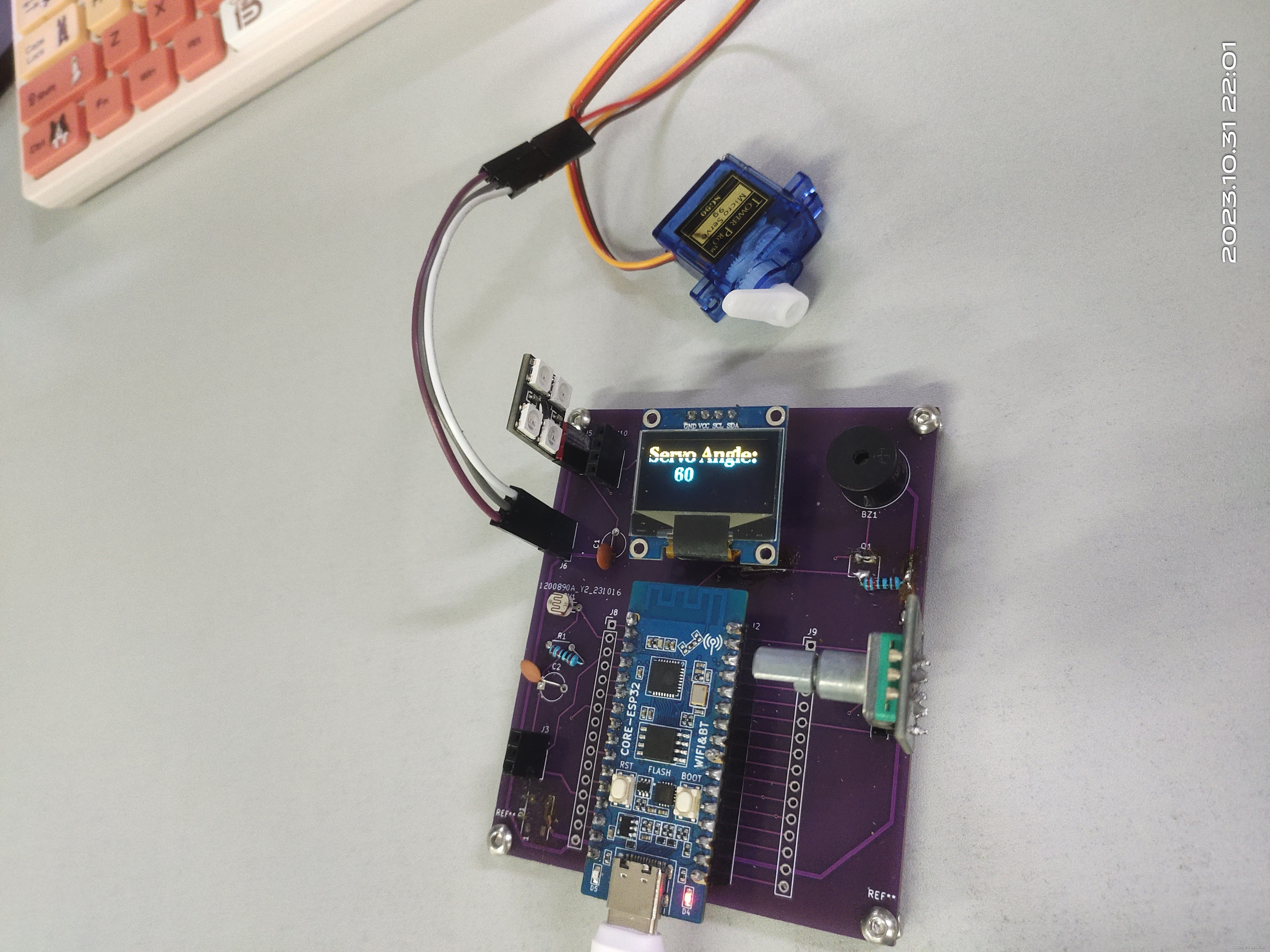
8.2 舵机控制
舵机显示60度位置,屏幕同步数值
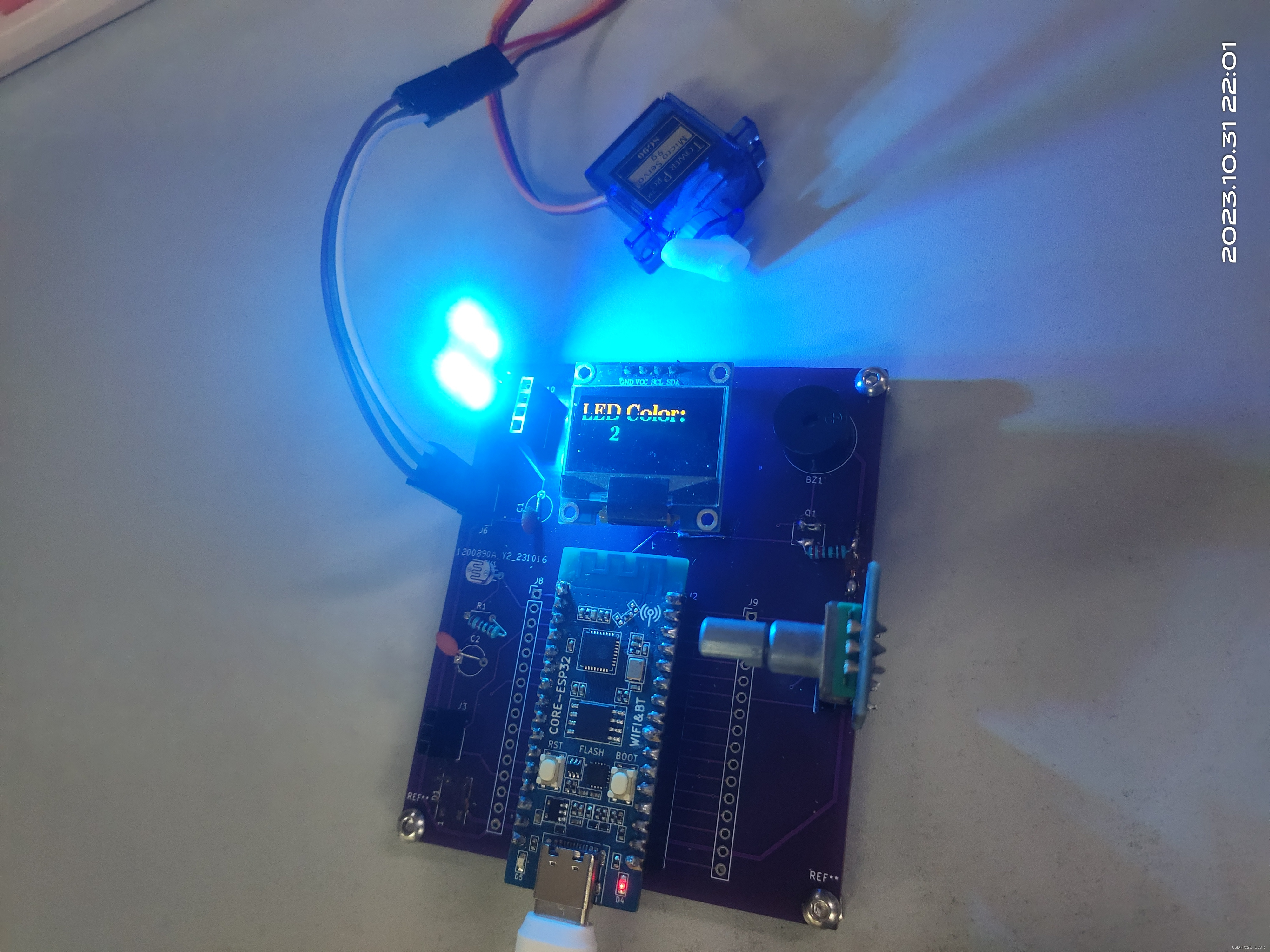
8.3 WS2812控制
WS2812显示蓝色灯,屏幕同步数值
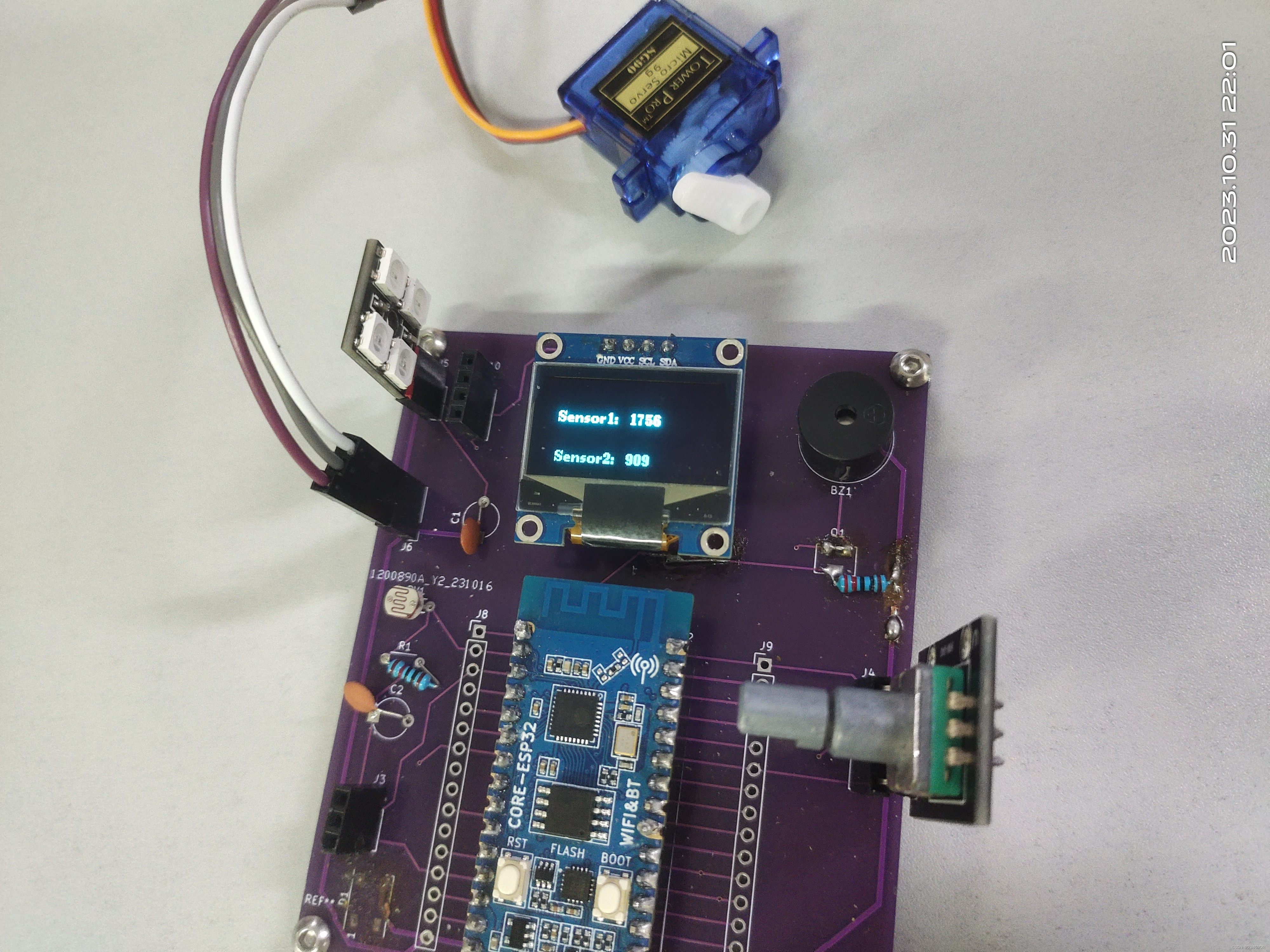
8.4 ADC读取
实时读取光敏ADC,屏幕同步数值
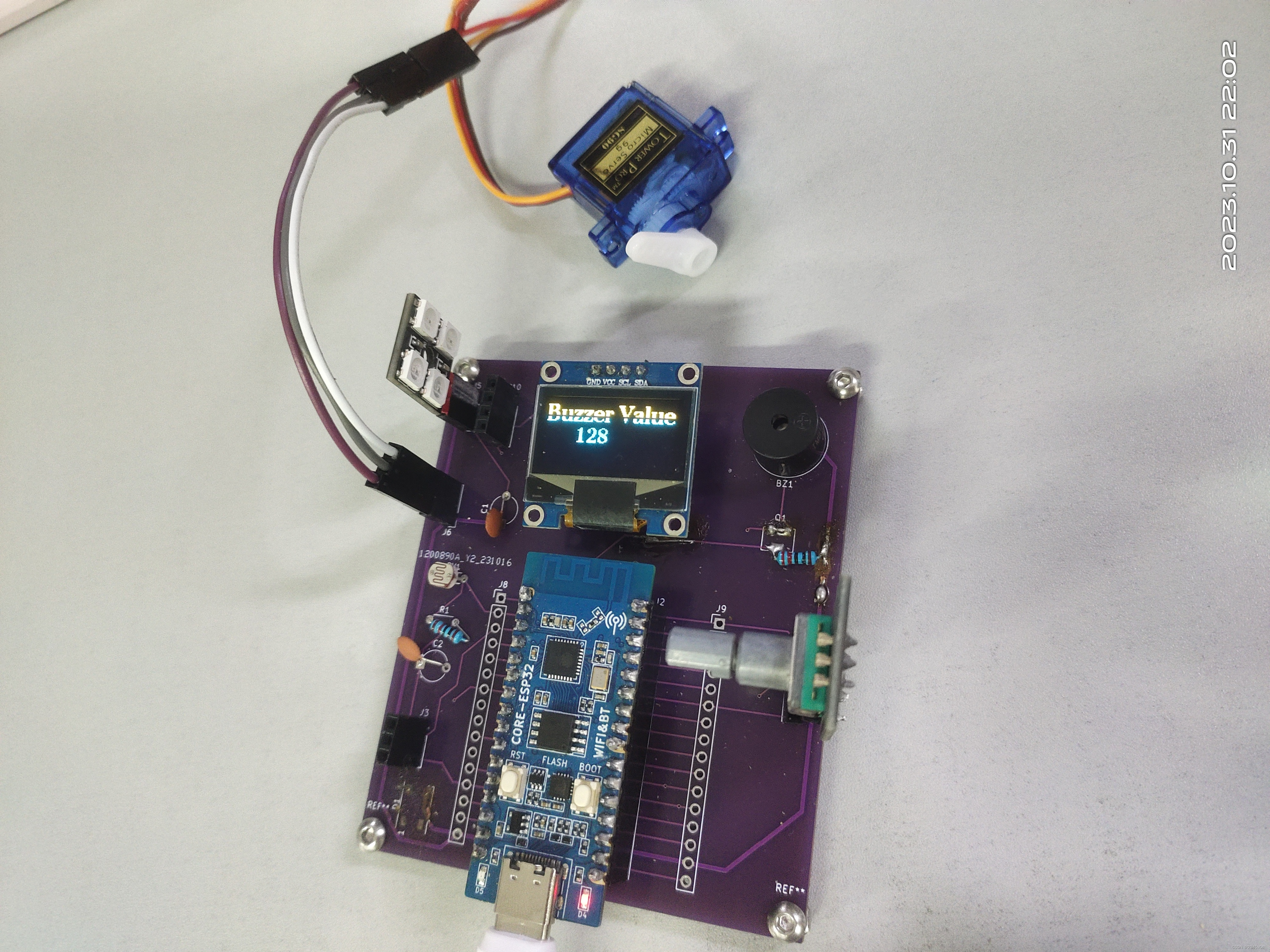
8.5 蜂鸣器PWM
蜂鸣器输出PWM,屏幕同步数值
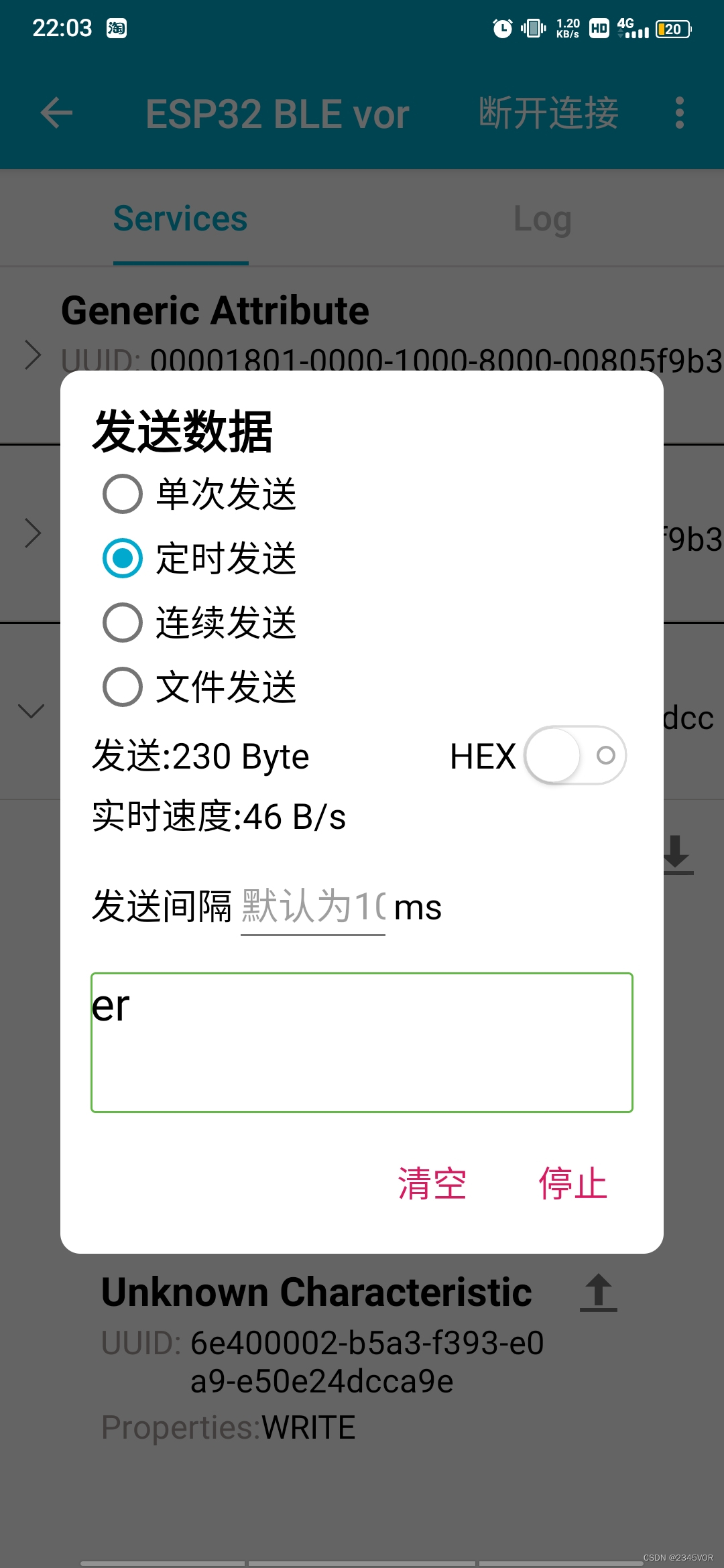
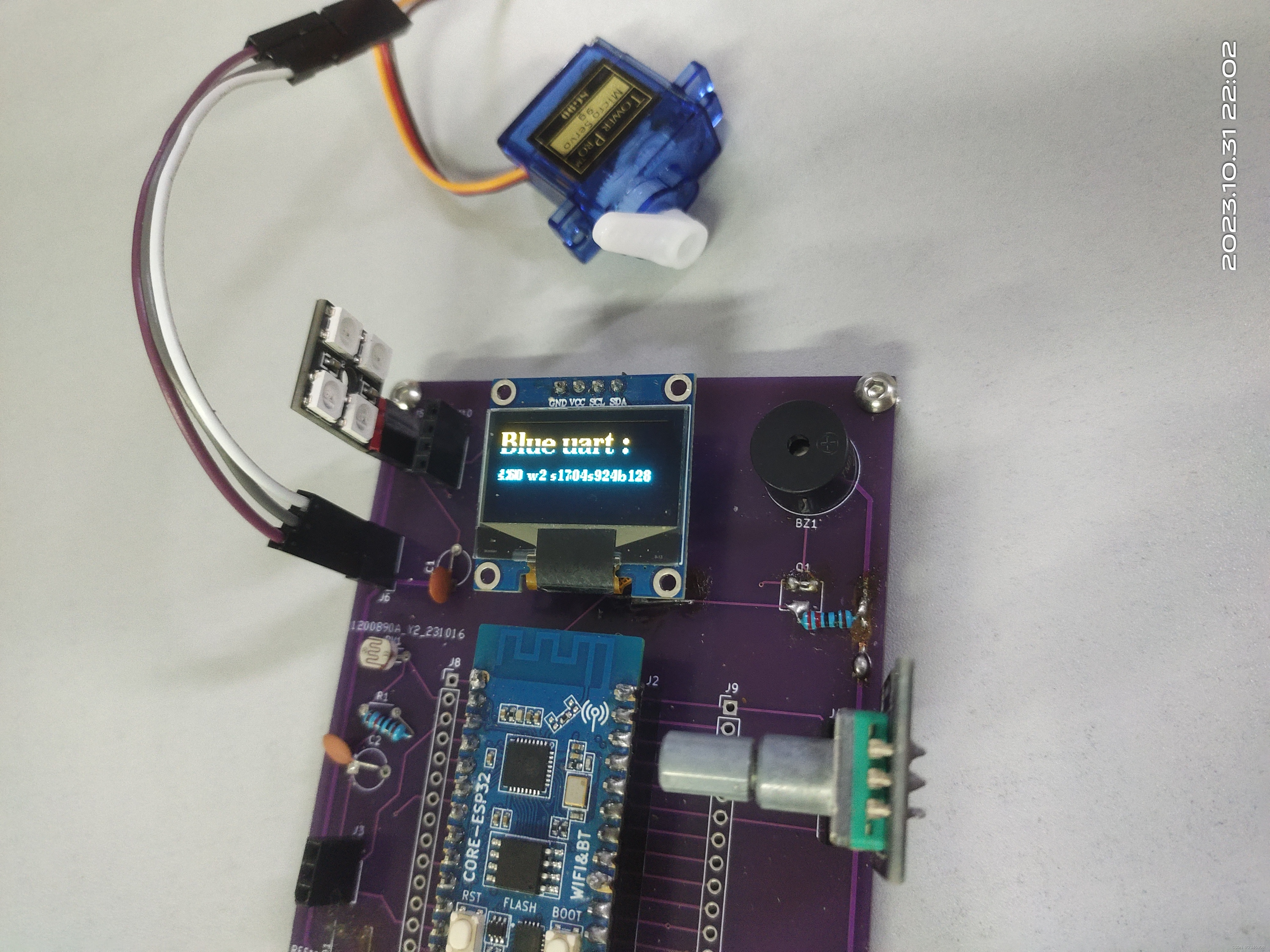
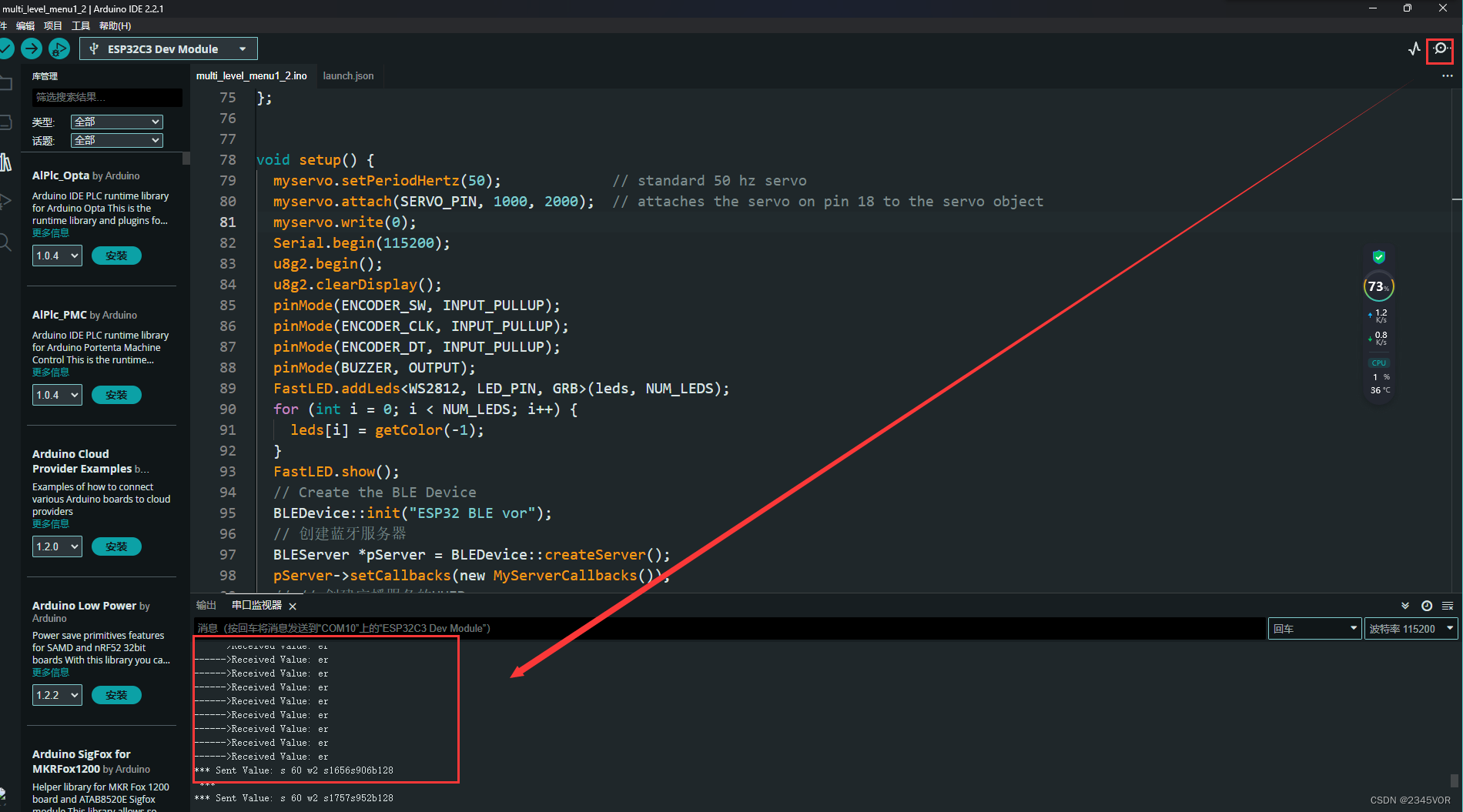
8.6 蓝牙交互
手机连接ESP32 BLE vor蓝牙,发送数据
屏幕读取状态
手机实时接收设备信息
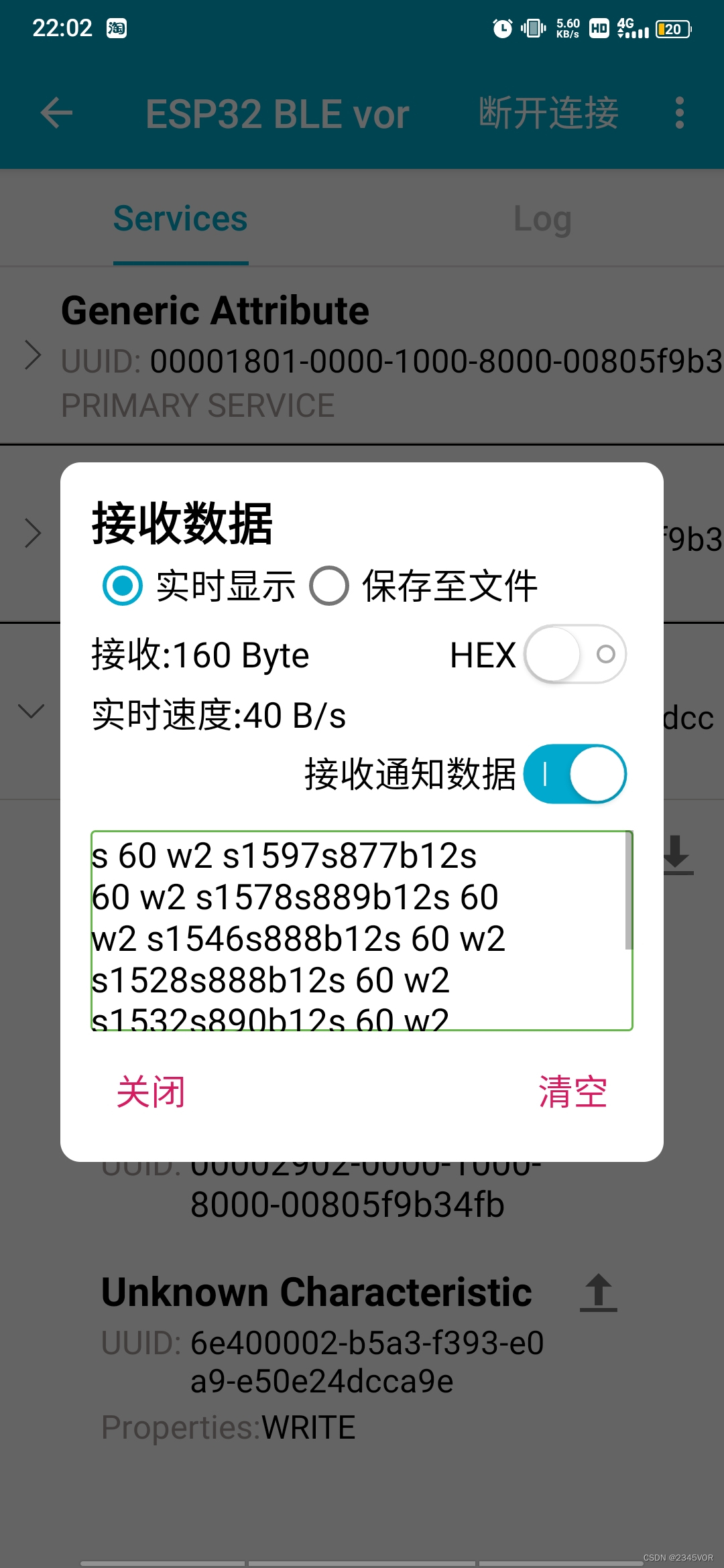
电脑串口显示设备状态和接收手机数据
-
9总结
这是我第四次参加嵌入式相关的网上比赛活动
- 第一次是RT-Thread的【基于RT-Thread+RA6M4的智能鱼缸系统设计之鱼我所欲也】活动,作品是2022年暑假做的获得第六名,还是比较开心!
- 第二次2023年寒假做的是【基于MAX7800羽毛板语音控制ESP8266小车】,成绩还没有出来,第七名。
- 第三次2023年春做的【基于腾讯云的CH32V307开发板远程机械臂小车】,由于图床引用CSDN导致最后评审没有显示出来,最后获得安慰奖
这次最大的收获是第一次实现了PCB板设计、制作和调试全流程,加深了对手机蓝牙双向通信,对esp32国产单片机更有信心!
这次最大的遗憾是没有加入蓝牙控制程序,相信大家自己解决哒。
建议:
- 希望得捷电子优化国内访问网站浏览和提高scheme-it工具设计水平;
- 期待硬禾联合各大平台推出更多有质量有意义持续性的创客活动!
非常感谢硬禾联合得捷电子官方组织的FastBond2活动,大家都为这个国内嵌入式生态出一份力,只要努力认真做了都会有所收获,期盼这些作品在将来某一天为构建美好未来贡献一份微博之力!
我后期会持续更新我测评的一系列国内开发板测评,并且作为宣传大使努力鼓励大家有所获参加有质量的硬禾活动🛹🛹🛹每天都一点点结合实际需求联动丰富生活,从而实现对外部世界进行充分的感知,尽最大努力认识这个有机与无机的环境,科学地合理地进行创作和发挥效益,然后为人类社会发展贡献一点微薄之力。🤣🤣🤣
🥳🥳🥳再次非常感谢硬禾的Lucia支持等等🥳🥳🥳期待这一次的成绩哟!
参考文献:
FastBond2阶段1——基于ESP32C3开发的简易IO调试设备 - 电子森林 (eetree.cn)
【esp32c3配置arduino IDE教程】-CSDN博客
【Arduino环境下驱动合宙esp32c3单片机基本外设】-CSDN博客
相关文章:
FastBond2阶段2——基于ESP32C3开发的简易IO调试设备
1. 项目介绍 之前买了许多国产单片机esp32c3一直在吃灰,没有发挥它的真实价值。非常感谢硬禾组织的Fastbond2活动,刚好两者经过微妙的碰撞。恰可以用于FastBond2活动主题4 - 测量仪器(单片机开发测试领域),或者用于国…...

03、SpringBoot + 微信支付 ---- 创建订单、保存二维码url、显示订单列表
目录 Native 下单1、创建课程订单保存到数据库1-1:需求:1-2:代码:1-3:测试结果: 2、保存支付二维码的url2-1:需求:2-2:代码:2-3:测试:…...

【echarts基础】在柱形图上设置文本
一、需求描述 在柱状图上设置文本标签,按需修改它的颜色、大小、边框、阴影等,如下。 二、代码展示 series:[{name:"螺蛳粉",type:"bar",data:data.data.chartData.chartData.num.螺蛳粉,label:{//图形上显示文本标签formatter:&q…...

小户型工业风,陌生上开花知书香。福州中宅装饰,福州装修
漫步陌上 只因陌上花开 花是自然的那种 朴素而恬淡,不落尘俗。—徐志摩 小户型工业风格 满足业主需求 筑造书香押韵家 从动线、色彩、选材、定制等各个环节 与业主一起畅谈家的构造 形成别“居”一格的温暖品质家 以书做墙 告别电视墙 这是一个实用性很强的…...

Gorm 中的迁移指南
探索使用 GORM 在 Go 中进行数据库迁移和模式更改的世界 在应用程序开发的不断变化的景观中,数据库模式更改是不可避免的。GORM,强大的 Go 对象关系映射库,通过迁移提供了一种无缝的解决方案来管理这些变化。本文将作为您全面的指南…...
基于.NET、Uni-App开发支持多平台的小程序商城系统 - CoreShop
前言 小程序商城系统是当前备受追捧的开发领域,它可以为用户提供一个更加便捷、流畅、直观的购物体验,无需下载和安装,随时随地轻松使用。今天给大家推荐一个基于.NET、Uni-App开发支持多平台的小程序商城系统(该商城系统完整开源…...
)
[python] 在多线程中将`logging.info`输出到不同的文件中 (生产者消费者)
在多线程中将logging.info输出到不同的文件中,可以使用Python标准库中的Queue和Thread模块。具体实现步骤如下: 创建多个Queue队列用于不同线程的日志输出,每个队列对应一个日志文件。 import queue# 创建三个队列用于不同线程的日志输出 l…...

MySQL进阶_5.逻辑架构和SQL执行流程
文章目录 第一节、逻辑架构剖析1.1、服务器处理客户端请求1.2、Connectors1.3、第1层:连接层1.4、第2层:服务层1.5、 第3层:引擎层1.6、 存储层1.7、小结 第二节、SQL执行流程2.1、查询缓存2.2、解析器2.3、优化器2.4、执行器 第三节、数据库…...
【油猴脚本】学习笔记
目录 新建用户脚本模板源注释 测试代码获取图标 Tampermonkey v4.19.0 原教程:手写油猴脚本,几分钟学会新技能——王子周棋洛 Tampermonkey首页 面向 Web 开发者的文档 Greasy Fork 新建用户脚本 打开【管理面板】 点击【】,即…...

宝塔面板使用Supervisor进程守护插件,配置守护Mysql的操作教程。
本篇文章主要讲解,在宝塔面板中使用Supervisor进程守护插件,配置守护Mysql的操作教程。 作者:任聪聪 日期:2023年11月5日 一、安装守护进程插件 安装插件一、进程守护插件 安装说明:在软件商店中搜索“进程守护”&am…...

Electron[2] Electron使用准备
1 背景 介绍一个技术栈的入门基础,往往要以该技术栈的入门案例作为开始比较合适,更能诱惑到刚需的粉丝,深度的学习。Electron的入门也不例外。在入门案例的讲解过程中,我们会学习到Electron引入需要的准备工作有哪些。 2 入门案例…...

npm create vue@latest 原理
文章目录 使用实际调用流程 使用 npm create vitelatest当执行上述命令时,会通过一个可交互的命令行终端下载模版,实际最终是调用 create-vue 库实现的 实际调用流程 npm create、innit 实际是 npm init 别名 ,npm init 后面加包名时,实际…...

【Unity基础】7.动画状态参数
【Unity基础】7.动画状态参数 大家好,我是Lampard~~ 欢迎来到Unity基础系列博客,所学知识来自B站阿发老师~感谢 (一)创建动画状态 (1) 创建动画状态 不好意思各位~最近工作比较忙,稍微耽误了这两周的博客。话…...

C语言映射表在串口数据解析中的应用
一、映射表在串口数据解析中的应用 1、数据结构 typedef struct {char CMD[CMDLen];unsigned char (*cmd_operate)(char *data); }Usart_Tab; 2、指令、函数映射表 static const Usart_Tab InstructionList[CMDMax] {{"PWON",PowOn},{"PWOFF",PowOff}…...

叁[3],感兴趣区域ROI
1,简介 ROI,感兴趣区域(region of interest),截取图像 2,获取方法 方法1:使用Rect cv::Mat srccv::imread("*.bmp");//读取原图 cv::Mat matROI src(cv::Rect(100,200,50,100));//截取原图&am…...

文件数据交换格式说明
对于文件的说明 二进制文件和文本文件的对比 对比项二进制文件文本文件定义二进制文件直接由二进制数字0和1组成,不存在统一的字符编码。文本文件是基于字符编码的文件,一般采用定长编码方式,如ASCII编码、UNICODE编码。优势1. 存储利用率高…...

2023NOIP A层联测24 总结
T1 给出树的一度点和三度点的数量,构造树的形态,节点数不超过 2000 2000 2000。我考虑先构造出三度点,发现这一度点至少是三度点2,打完后测样例不对,发现加一度点时要特判是否为三度点,花 5min 打完&#…...

vue3 项目如何配置测试环境打包
vue3 项目如何配置测试环境打包 根目录下创建.env.staging # 测试环境 NODE_ENV staging VUE_APP_MODE staging VUE_APP_TITLE 系统名称# 测试环境API接口地址 VUE_APP_API_URL 接口地址package.json文件中 scripts配置中添加以下代码 "scripts": {"serve&q…...

【CSS】样式的计算过程
标签的 CSS 样式 现在有这么一段 HTML 代码: <div class"test"><h1>Hello World</h1> </div>目前我们没有给 h1 设置任何样式,可以看到 h1 自带了一些样式,eg:font-size、font-weight、margi…...

【ArcGIS微课1000例】0076:KMZ转换KML的方法
文章目录 ArcGIS转kmzkmz转kmlArcGIS转kmz ArcGIS可以很方便的将dwg,shp、等矢量数据转为kmz。 拓展阅读: 【ArcGIS微课1000例】0075:将AutoCAD(Dwg、Dxf)文件转换为shp、KML(kml、kmz)文件...

ZjDroid命令大全:从DEX内存dump到Lua脚本注入的完整教程
ZjDroid命令大全:从DEX内存dump到Lua脚本注入的完整教程 【免费下载链接】ZjDroid Android app dynamic reverse tool based on Xposed framework. 项目地址: https://gitcode.com/gh_mirrors/zj/ZjDroid ZjDroid是一款基于Xposed框架的Android应用动态逆向分…...
)
告别网盘客户端!用Alist+RaiDrive把百度云盘变成电脑本地文件夹(保姆级图文教程)
用AlistRaiDrive实现网盘本地化管理的终极方案 你是否厌倦了电脑上安装多个网盘客户端,不仅占用系统资源,操作还繁琐割裂?每次上传下载文件都要在不同客户端间切换,效率低下。现在,通过Alist和RaiDrive的组合…...

基于Arduino与应变片传感器的高精度厨房电子秤DIY全攻略
1. 项目概述:用Arduino打造一台高精度厨房电子秤作为一个喜欢在厨房里折腾的硬件爱好者,我经常遇到需要精确称量食材的场合。市面上的电子秤要么精度不够,要么价格不菲,要么功能单一。于是,我萌生了自己动手做一台的想…...

AArch64内存管理:MAIR_EL3寄存器详解与应用
1. AArch64内存管理基础与MAIR_EL3寄存器定位 在Armv8-A/v9-A架构中,内存管理单元(MMU)通过多级页表实现虚拟地址到物理地址的转换。当处理器执行内存访问时,MMU会遍历页表条目(Translation Table Entry),其中包含两个关键信息:目…...

FM3773 低功耗离线式恒流/恒压 PSR 控制器
概述 FM3773 是一种高性能的交流/直流用于电池充电器和适配器的电源控制器,内置 850V 功率三极管。该设备采用脉冲频率调制(PFM)的方法来建立非连续导通模式(DCM)反激式电源。 FM3773 提供精确的恒定电压,恒…...

03 - 变量与数据类型
03 - 变量与数据类型 变量是编程里最基础的概念,相当于你往电脑里存东西的"容器"。这章我们把变量的命名规则、Python 的几种基本数据类型都过一遍。 变量是什么 说白了,变量就是一个有名字的盒子。你往里面放个东西,以后想用这个…...

天文时序数据分析:机器学习评估、半监督学习与无监督方法实战
1. 项目概述:当机器学习遇见星空 处理海量的天文时序数据,比如来自Kepler、TESS这些“巡天巨眼”的光变曲线,早已不是靠人眼一张张图去翻的时代了。数据量太大,噪声复杂,信号微弱,传统方法常常力不从心。这…...

AutoWall终极指南:如何在Windows上轻松设置炫酷动态壁纸
AutoWall终极指南:如何在Windows上轻松设置炫酷动态壁纸 【免费下载链接】AutoWall 🌌 Live wallpapers on Windows 7/8/10/11 using open-source wallpaper engine 项目地址: https://gitcode.com/gh_mirrors/au/AutoWall 厌倦了千篇一律的静态桌…...
提升你的图表专业度?)
从科研图表到商业报表:如何用Matplotlib的legend()提升你的图表专业度?
从科研图表到商业报表:如何用Matplotlib的legend()提升你的图表专业度? 在数据驱动的决策时代,图表不仅是科研论文中的证据载体,更是商业汇报中的说服工具。我曾见证一位生物统计学家将同一组临床试验数据呈现给三种不同受众&…...

NPU跑LLM实战指南:KV Cache动态性如何突破硬件限制
NPU跑LLM实战指南:KV Cache动态性如何突破硬件限制 副标题: 从预分配+Attention Mask到三层软件栈,完整解析NPU推理架构 痛点:为什么NPU跑LLM这么难? LLM的生成机制和NPU的硬件特性存在根本冲突: LLM特性 NPU特性 冲突点 逐token生成 固定shape执行 KV Cache动态增长 动…...