windows下使用FCL(Flexible-collision-library)
windows下使用FCL(The Flexible-collision-library)
FCL做为一款开源的碰撞检测库,支持多种基础的几何体,及支持C++和python,在windows和linux平台均可以使用。是一款计算高效的碰撞检测工具。在机械臂规划控制框架moveit中做为基础的碰撞检测算法。
FCL支持的几何体类型:
- box (长方体)
- sphere(球)
- ellipsoid(椭球)
- capsule(胶囊体)
- cone(锥体)
- cylinder(圆柱)
- convex(凸包)
- half-space(半空间)
- plane(平面)
- mesh(面片)
- octree (八叉树)
FCL库(The Flexible Collision Library)主要的功能有:
1、碰撞检测:检测两个模型是否重叠,以及(可选)所有重叠的三角形。
2、距离计算:计算一对模型之间的最小距离,即最近的一对点之间的距离。
3、公差验证:确定两个模型是否比公差距离更近或更远。
4、连续碰撞检测:检测两个运动模型在运动过程中是否重叠,以及可选的接触时间。
5、接触信息:对于碰撞检测和连续碰撞检测,可以选择返回接触信息(包括接触法线和接触点)。
源码下载及编译
FCL 源码github
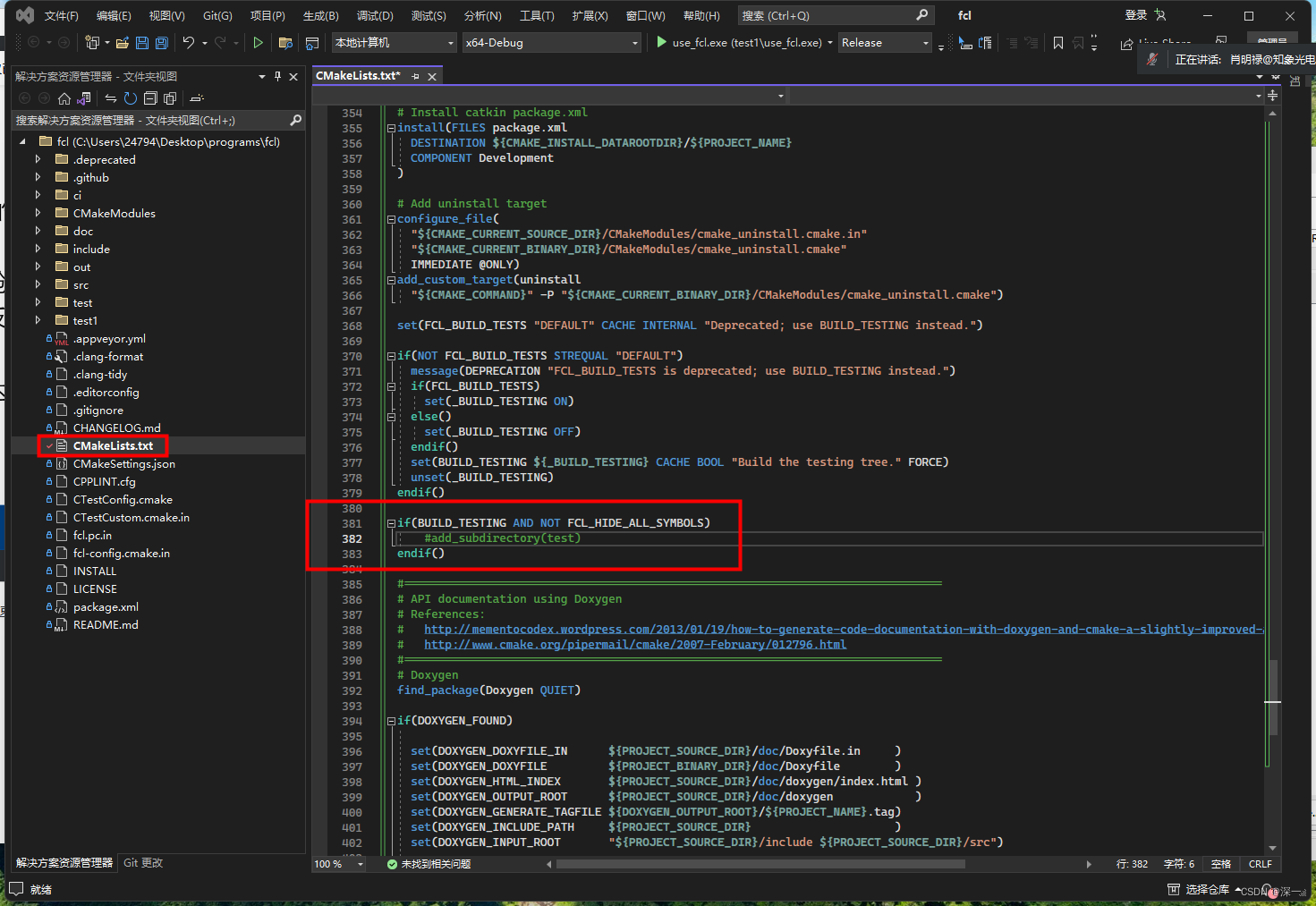
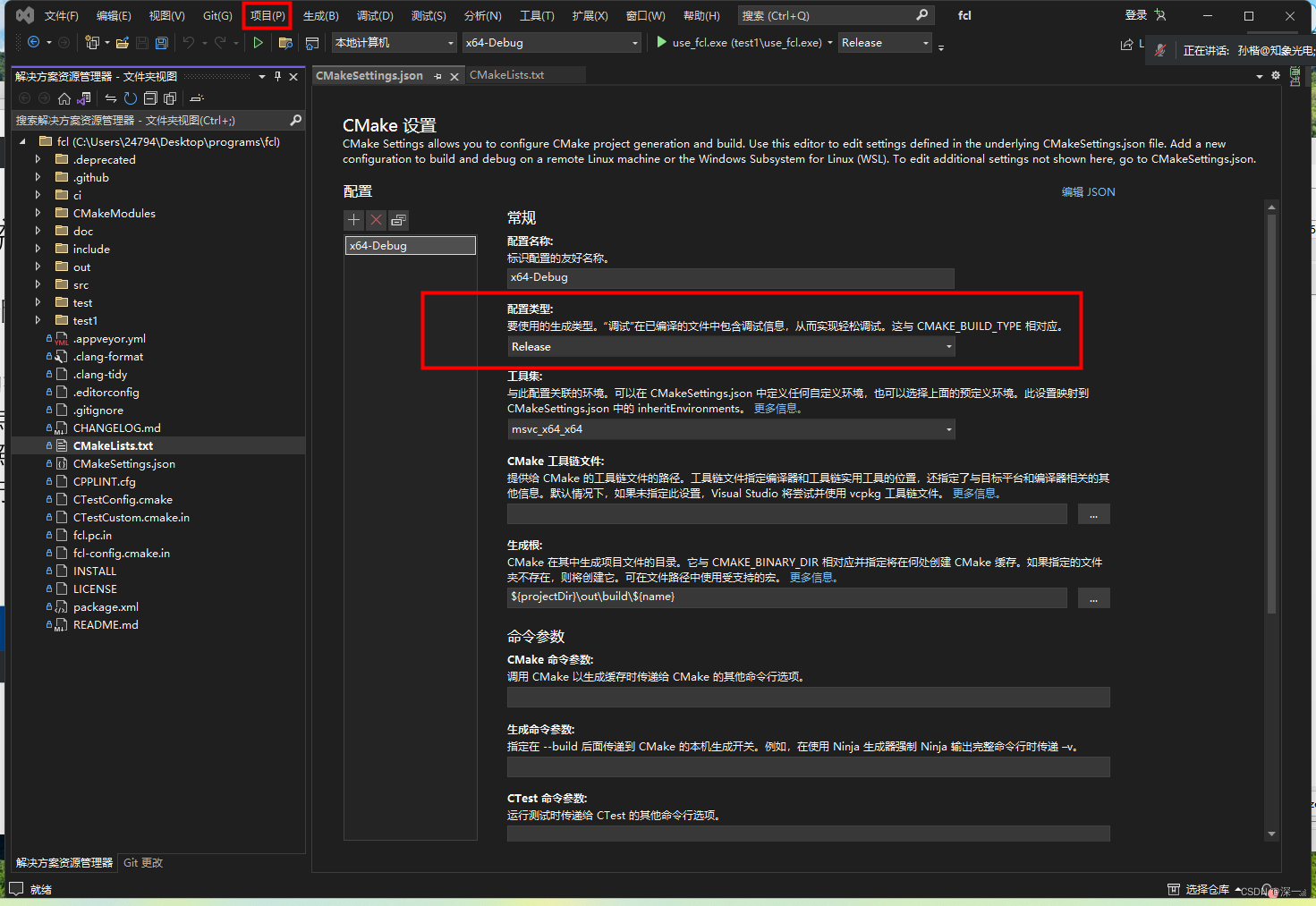
在windows环境下,使用VS studio直接编译FCL存在问题,需要将CMake设置成Release版本以及屏蔽掉测试程序。具体操作如下:
- 使用VS studio打开FCO源码工程,如图1所示。
FCL碰撞测试demo
测试程序如下所示:
//main.cpp
#include "fcl/math/constants.h"
#include "fcl/narrowphase/collision.h"
#include "fcl/narrowphase/collision_object.h"
#include "fcl/narrowphase/distance.h"/*** @brief 两个相互碰撞的Box碰撞检测测试*/
void test1() {std::shared_ptr<fcl::CollisionGeometry<double>> box1(new fcl::Box<double>(3, 3, 3));std::shared_ptr<fcl::CollisionGeometry<double>> box2(new fcl::Box<double>(1, 1, 1));fcl::Transform3d tf1 = fcl::Transform3d::Identity();fcl::CollisionObjectd obj1(box1, tf1);fcl::Transform3d tf2 = fcl::Transform3d::Identity();fcl::CollisionObjectd obj2(box2, tf2);fcl::CollisionRequestd request;fcl::CollisionResultd result;request.gjk_solver_type =fcl::GJKSolverType::GST_INDEP; // specify solver type with the default// type is GST_LIBCCDfcl::collide(&obj1, &obj2, request, result);std::cout << "test1 collide result:" << result.isCollision() << std::endl;
}/*** @brief 两个无碰撞的Box碰撞检测测试*/
void test2() {std::shared_ptr<fcl::CollisionGeometry<double>> box1(new fcl::Box<double>(3, 3, 3));std::shared_ptr<fcl::CollisionGeometry<double>> box2(new fcl::Box<double>(1, 1, 1));fcl::Transform3d tf1 = fcl::Transform3d::Identity();fcl::CollisionObjectd obj1(box1, tf1);fcl::Transform3d tf2 = fcl::Transform3d::Identity();tf2.translation() = fcl::Vector3d{3, 0, 0};fcl::CollisionObjectd obj2(box2, tf2);fcl::CollisionRequestd request;fcl::CollisionResultd result;fcl::collide(&obj1, &obj2, request, result);std::cout << "test2 collide result:" << result.isCollision() << std::endl;
}/*** @brief 两个无碰撞的Box碰撞检测测试,并计算最短距离*/
void test3() {std::shared_ptr<fcl::CollisionGeometry<double>> box1(new fcl::Box<double>(3, 3, 3));std::shared_ptr<fcl::CollisionGeometry<double>> box2(new fcl::Box<double>(1, 1, 1));fcl::Transform3d tf1 = fcl::Transform3d::Identity();fcl::CollisionObjectd obj1(box1, tf1);fcl::Transform3d tf2 = fcl::Transform3d::Identity();tf2.translation() = fcl::Vector3d{3, 0, 0};fcl::CollisionObjectd obj2(box2, tf2);fcl::CollisionRequestd request;fcl::CollisionResultd result;// fcl::collide(&obj1,&obj2,request,result);std::cout << "test3 collide result:" << result.isCollision() << std::endl;fcl::DistanceRequestd dist_request(true);dist_request.distance_tolerance = 1e-4;fcl::DistanceResultd dist_result;fcl::distance(&obj1, &obj2, dist_request, dist_result);std::cout << "test3 collide distance:" << dist_result.min_distance<< std::endl;std::cout << "test3 collide point 0:" << dist_result.nearest_points[0]<< std::endl;std::cout << "test3 collide point 1:" << dist_result.nearest_points[1]<< std::endl;
}/*** @brief 加载STL模型*/
bool loadSTLFile(const std::string& filename,std::vector<fcl::Triangle>& triangles) {std::ifstream file(filename, std::ios::in | std::ios::binary);if (!file) {std::cerr << "Failed to open STL file: " << filename << std::endl;return false;}file.seekg(0, std::ios::end); /// 定位到流末尾的位置,0偏移std::streampos length = file.tellg(); /// 记录当前指针位置file.seekg(0, std::ios::beg); /// 定位到流开头的位置,0偏移std::vector<char> buffer(length);file.read(&buffer[0], length);file.close();if (length < 84) {std::cerr << "Invalid STL file: " << filename << std::endl;return false;}unsigned int num_triangles = *(unsigned int*)&buffer[80];triangles.resize(num_triangles);unsigned int offset = 84;for (unsigned int i = 0; i < num_triangles; ++i) {for (unsigned int j = 0; j < 3; ++j) {// 3顶点构成三角形float* vertex = (float*)&buffer[offset + j * 12];triangles[i][j] = (vertex[0], vertex[1], vertex[2]);}offset += 50;}return true;
}/*** @brief 在STL文件格式中,文件头部分包含80个字节的文件头信息和4个字节的三角形数量信息,因此文件总长度至少为84个字节。
因此,在loadSTLFile函数中我们首先检查文件长度是否小于84个字节,如果是则认为文件格式非法。
在STL文件中,每个三角形由12个浮点数和2个无用字节组成,因此每个三角形占用50个字节。
因此,在loadSTLFile函数中,我们通过一个循环遍历每个三角形,并从文件中读取对应的12个浮点数,最后将三角形的3个顶点存储在一个fcl::Triangle类型的变量中。
每次读取完一个三角形后,需要将读取指针向前移动50个字节,即offset += 50。由于文件头部分占用了前84个字节,因此,在开始循环前需要将读取指针初始化为offset= 84,从而跳过文件头部分,开始读取三角形信息。*/
void test4() {std::vector<fcl::Triangle> triangles; /// 创建三角片序列/// 加载模型if (!loadSTLFile("C:/test0.STL", triangles)) {std::cout << "Error:loadSTLFile failed!" << std::endl;return;}/// 创建mesh,并添加三角片到mesh///std::shared_ptr<fcl::BVHModel<fcl::OBBRSSd>> mesh_geometry(new fcl::BVHModel<fcl::OBBRSSd>());mesh_geometry->beginModel();for (const auto& triangle : triangles) {Eigen::Vector3d p1(triangle[0]), p2(triangle[1]), p3(triangle[2]);mesh_geometry->addTriangle(p1, p2, p3);}mesh_geometry->endModel();/// 建立碰撞对象-stl ,并添加CollisionGeometry,坐标位置(0,0,0)fcl::CollisionObjectd obj(mesh_geometry);/// 建立碰撞对象-box ,坐标位置(0,0,20)std::shared_ptr<fcl::Boxd> box1 = std::make_shared<fcl::Boxd>(2.0, 2.0, 2.0);fcl::CollisionObjectd obj1(box1);obj1.setTranslation(Eigen::Vector3d(0, 0, 0));fcl::CollisionRequestd request;fcl::CollisionResultd result;/// 进行碰撞检测fcl::collide(&obj, &obj1, request, result);/// 输出碰撞结果if (result.isCollision()) {std::cout << "Collision detected!" << std::endl;} else {std::cout << "No collision detected." << std::endl;}/// 距离检测fcl::DistanceRequestd requestd;fcl::DistanceResultd resultd;fcl::distance(&obj, &obj1, requestd, resultd);std::cout << "min_distance:" << resultd.min_distance << std::endl;
}int main(int argc, char** argv) {std::cout << "FCL test" << std::endl;test1();test2();test3();test4();std::cout << "end test" << std::endl;return 0;
}
CMakeList.txt文件如下所示:
cmake_minimum_required(VERSION 3.14)
find_package(Eigen3 REQUIRED)
find_package(FCL REQUIRED)
add_executable(use_fcl main.cpp)
target_link_libraries(use_fcl fcl Eigen3::Eigen)
target_include_directories(use_fcl PUBLIC ${EIGEN3_INCLUDE_DIRS} ${FCL_INCLUDE_DIRS})
相关文章:
windows下使用FCL(Flexible-collision-library)
windows下使用FCL(The Flexible-collision-library) FCL做为一款开源的碰撞检测库,支持多种基础的几何体,及支持C和python,在windows和linux平台均可以使用。是一款计算高效的碰撞检测工具。在机械臂规划控制框架movei…...
Godot4实现游戏的多语言版本
要在Godot 4中实现多语言版本的游戏,您需要按照以下几个步骤来设置和管理游戏文本以及可能的其他资源,如图像或声音。以下是根据官方文档和详细教程整理的简明指南: 准备翻译文件: Godot支持使用.csv文件或.po文件进行国际化…...
6张图让你了解openRA 下载及编译
下面的3张图是免费赠送的用vs解决方案编译的方法...

华为防火墙 配置 SSLVPN
需求: 公司域环境,大陆客户端居家办公室需要连到公司域,这里可以在上海防火墙上面开通SSLVPN,员工就可以透过SSLVPN连通上海公司的内网,但是由于公司域控有2个站点,一个在上海,一个在台北&…...
)
Android Studio(数据存储)
数据存储方式 方式特点文件存储openFileInput()和openFileOutput()进行存写SharedPreferences以XML格式进行存储SQLite运算快、占用资源少、支持基本的sql语法ContentProvider可用于应用之间的数据交互网络存储通过网络提供的存储空间来存储/获取数据信息 文件存储 主要语法…...

人,要懂得享受孤独
喜欢在如水的月光下,望一轮洁白的皓月, 喜欢在清寂的夜晚,看那星光流转倏忽间的变幻,牵动心中万千情怀。 独享这份清幽,遐想那月中寻桂子的浪漫。 这个世界太喧闹,偶尔,需要关一关窗,…...
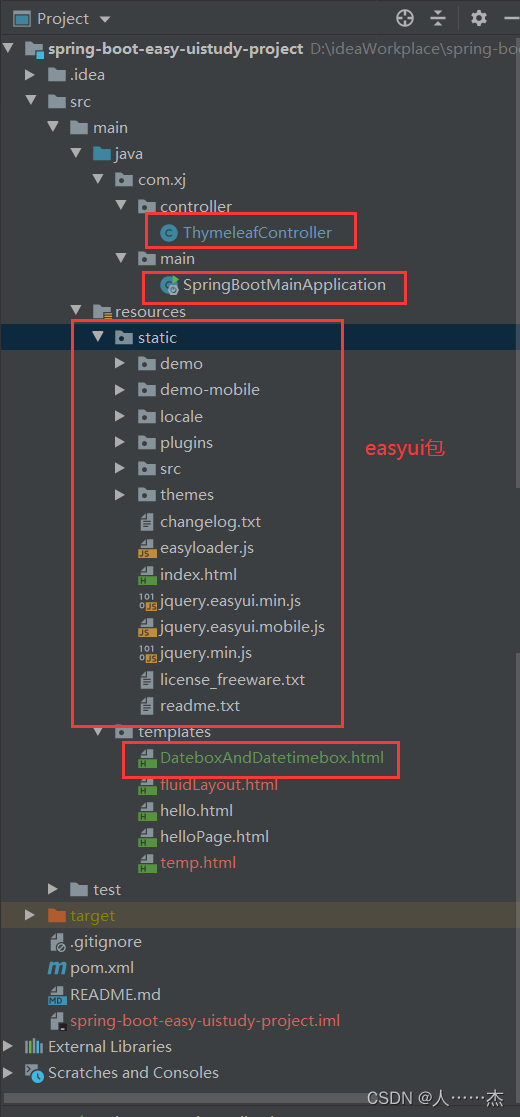
Spring Boot + EasyUI Datebox和Datetimebox样例
使用EasyUI的Datebox和Datetimebox组件,并对其进行适当的改造,比如更改日期格式、设置默认值或者将当前时间设置为默认值。 一、运行结果 二、实现代码 1.代码框架 2.实现代码 SpringBootMainApplication.java: package com.xj.main;import org.spri…...
web前端JS基础------制作一个获取验证码
1,需要一个定时器,和一个button,通过点击事件启动获取验证码 2,参考代码如下 <!DOCTYPE html> <html><head><meta charset"utf-8"><title></title></head><body><…...

MyBatis面经
MyBatis常见面试题 !!本文主要是博主总结看着玩的,不具有很高的参考价值,慎重 1、MyBatis是什么?MyBatis工作原理?MyBatis的使用场景有哪些? MyBatis是一款优秀的持久层框架,它是…...
-- 辅助功能之一 -- 内嵌tomcat)
SpringBoot基础(六)-- 辅助功能之一 -- 内嵌tomcat
目录 1. 内嵌Tomcat定义位置 2. 内嵌Tomcat运行原理 3. 更换内嵌Tomcat 在前面,我们做的SpringBoot入门案例(SpringBoot基础(一)-- 使用idea(2022版)创建一个Springboot项目(联网开发))勾选了Spirng-web的功能&#...
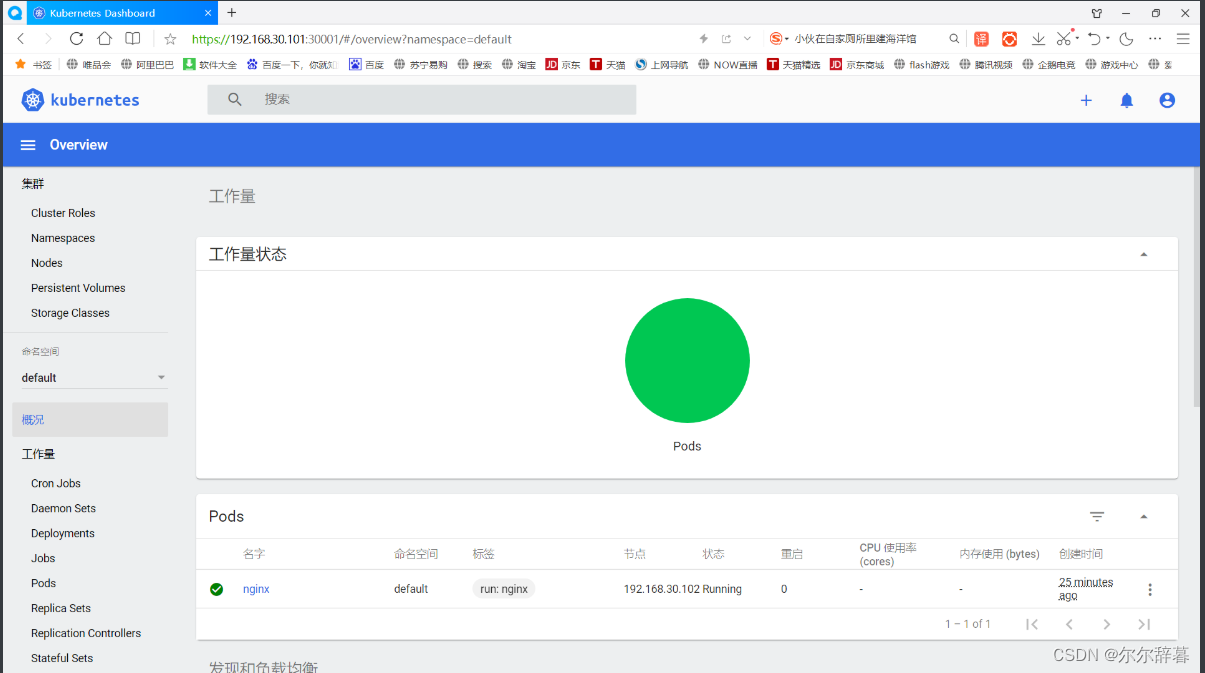
K8s:部署 CNI 网络组件+k8s 多master集群部署+负载均衡及Dashboard k8s仪表盘图像化展示管理
目录 1 部署 CNI 网络组件 1.1 部署 flannel 1.2 部署 Calico 1.3 部署 CoreDNS 2 负载均衡部署 3 部署 Dashboard 1 部署 CNI 网络组件 1.1 部署 flannel K8S 中 Pod 网络通信: ●Pod 内容器与容器之间的通信 在同一个 Pod 内的容器(Pod 内的容…...
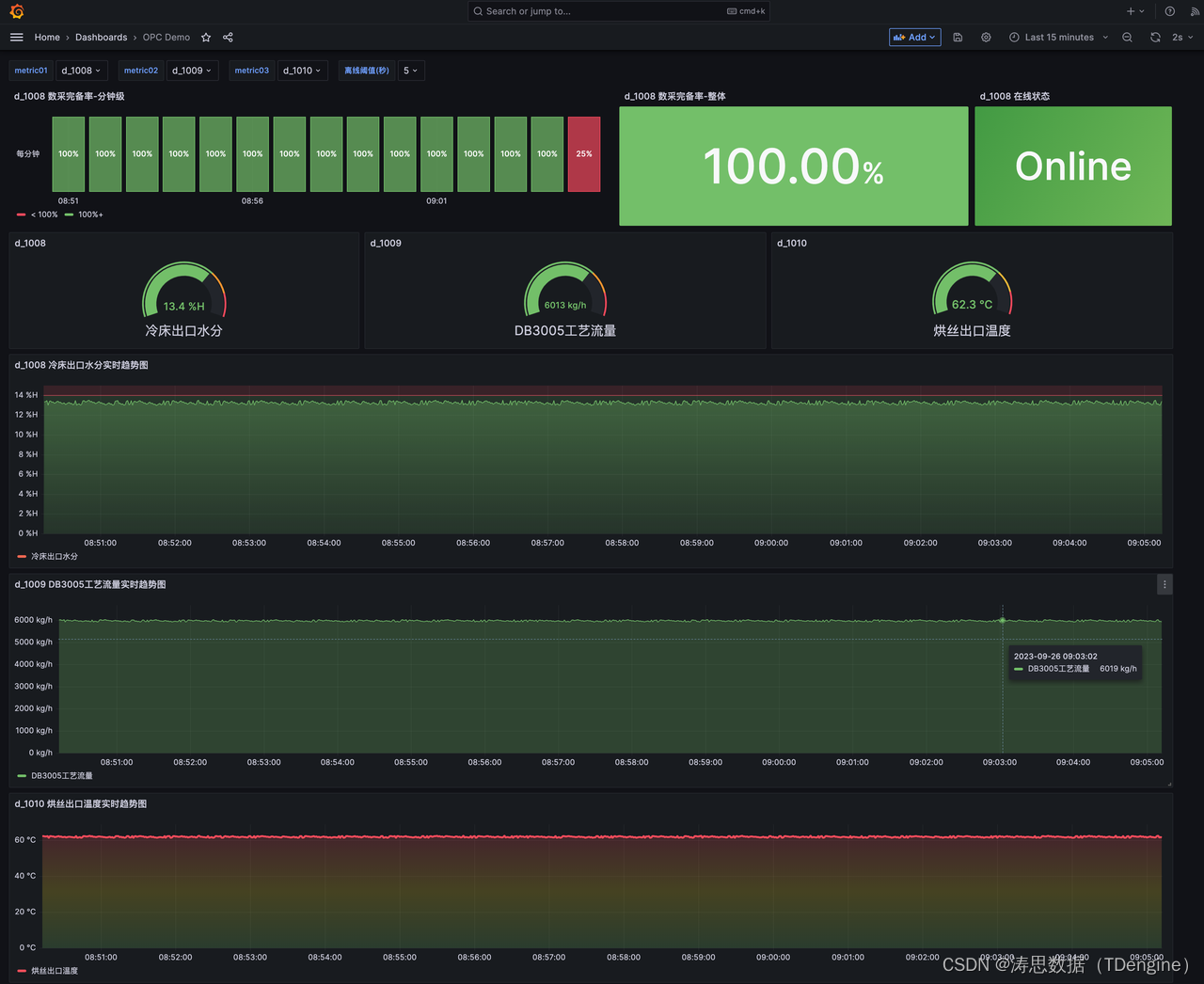
「直播回放」使用 PLC + OPC + TDengine,快速搭建烟草生产监测系统
在烟草工业场景里,多数设备的自动控制都是通过 PLC 可编程逻辑控制器来实现的,PLC 再将采集的数据汇聚至 OPC 服务器。传统的 PI System、实时数据库、组态软件等与 OPC 相连,提供分析、可视化、报警等功能,这类系统存在一些问题&…...

私域流量搭建与运营,技巧全攻略!
2023年是比拼运营深度和服务效率的一年,用户对于体验的期望值将持续增长,企业需提供无缝的客户体验,以推动增长、保障收入、确保客户忠诚度。在疫情新常态下,企业已构建起APP、小程序等一系列线上触点矩阵,而各个触点之…...

AWS SAP-C02教程0--课程概述
SAP是亚马逊云的解决方案架构师专业级认证,关于本课程,我会简述已下3点: 在本课程中按照自己的分类讲述考试相关的AWS产品,特别会注明每个产品在考试中可能出现的考点会对一些解决方案做对比,通过一些对比给出不同场景…...

RFC使用与WebService
RFC连接 CSDN RFC中引用类型组 http://t.csdnimg.cn/wQWAYhttp://t.csdnimg.cn/wQWAY 远程目标系统维护SM59 这里的类型指的是目标系统的系统类型(目标系统即rfc函数存在的系统). 类型2(R/2连接),只需给出主机名,所有通信信息…...
打造全球化电商平台,多语言商城系统助您开拓海外市场
全球化进程的加速,越来越多的企业开始将目光投向海外市场。然而,语言和文化差异成为了企业面临的一大挑战。为了帮助企业顺利拓展海外业务,多语言商城系统应运而生。作为一种功能强大的电子商务平台,多语言商城系统具备以下关键功…...

【滑动窗口】篮里到底能装 “几个水果” 呢?
Problem: 904. 水果成篮 文章目录 题目分析算法原理分析暴力枚举 哈希表滑动窗口优化数组再度优化 复杂度Code 题目分析 首先我们来分析一下本题的思路 首先我们通过题目的描述来理解一下其要表达的含义,题目给到我们一个fruit数组,里面存放的是每棵树上…...

newstarctf2022week2
Word-For-You(2 Gen) 和week1 的界面一样不过当时我写题的时候出了个小插曲 连接 MySQL 失败: Access denied for user rootlocalhost 这句话印在了背景,后来再进就没了,我猜测是报错注入 想办法传参 可以看到一个name2,试着传参 发现有回显三个字段…...

集群调度-01
目录 1、调度约束 2、Pod 是 Kubernetes 的基础单元,Pod 启动典型创建过程如下 2.1 工作机制 **** 2.2 调度过程 *** 2.3 Predicate 有一系列的常见的算法可以使用: ** 2.4 指定调度节点 1、调度约束 Kubernetes 是通过 List-Watch **…...
)
【软件工程】金管局计算机岗位——软件测试的分类(⭐⭐⭐⭐)
软件工程 软件测试的分类从是否关心软件内部结构和具体实现的角度划(⭐⭐⭐⭐)从是否执行代码角度划分(⭐⭐)从软件开发的过程按阶段划分(⭐⭐⭐⭐) 软件测试的分类 考点导读: 软件测试是软件工…...

AI Agent在智能风控中的实战:多智能体欺诈检测与预警
AI Agent在智能风控中的实战:多智能体欺诈检测与预警 你有没有过明明是正常交易却被银行冻结账户的糟糕体验?或是听说过某电商平台上线新活动首日就被黑产团伙薅走数千万补贴的新闻?随着黑产欺诈向团伙化、专业化、动态化演进,传统依赖规则引擎、单模型机器学习的风控体系已…...

Spring Cloud AWS 实战教程:构建高可用 SQS 消息队列应用 [特殊字符]
Spring Cloud AWS 实战教程:构建高可用 SQS 消息队列应用 🚀 【免费下载链接】spring-cloud-aws The New Home for Spring Cloud AWS 项目地址: https://gitcode.com/gh_mirrors/sp/spring-cloud-aws Spring Cloud AWS 是一个强大的开源框架&…...

机器学习与深度学习在地球物理勘探中的应用:基于电阻率数据预测极化率模型
1. 项目概述与核心价值在花岗岩这类地质条件复杂的地区搞勘探,最头疼的就是地下情况“看不清”。传统的电阻率(ERT)和激发极化(IP)联合反演,就像用一把刻度模糊的尺子去量一块表面坑洼不平的石头——面对高…...

Godot中型项目工程化实践:目录规范、资源引用与状态管理
1. 这不是续集,而是项目落地的分水岭“Godot 游戏引擎项目(二)”——看到这个标题,很多人第一反应是:“哦,上一篇讲了环境搭建和Hello World,这篇该讲节点树和信号了?”但我在带三个…...

新手也能懂的SSRF漏洞实战:用iwebsec靶场复现文件读取与内网探测
从零开始掌握SSRF漏洞:iwebsec靶场实战指南1. 认识SSRF漏洞的本质想象一下,你正在一家高档餐厅点餐,服务员承诺可以帮你从任何地方获取食材——包括隔壁竞争对手的厨房。SSRF(Server-Side Request Forgery)漏洞就像这个…...

30岁裸辞后,我用两个月拿下AI应用认证,现在OFFER选择困难症犯了
30岁裸辞那天,我最怕的不是没收入,而是突然发现:过去积累的经验,正在被AI重新定价。以前会写方案、做表格、跟项目,算是职场硬通货;到了2026年,招聘JD里开始频繁出现AI工具应用、智能工作流、Pr…...

Visual Paradigm 17.0 团队协作新功能实测:手把手教你用项目模板和文件夹管理提效
Visual Paradigm 17.0 团队协作实战指南:从模板配置到文件夹管理的高效工作流在敏捷开发团队中,项目启动速度和资产管理的规范性往往直接影响整体效率。Visual Paradigm 17.0针对这一痛点推出的团队协作增强功能,特别是服务器端项目模板和文件…...
:揭秘那个让虚拟世界“有重量感“的阴影魔法)
环境光遮蔽(Ambient Occlusion):揭秘那个让虚拟世界“有重量感“的阴影魔法
一、一个让我"开窍"的老木匠故事 我有个朋友是传统家具的修复师,他给我讲过一个让我至今难忘的故事。他说他刚入行时跟着一位 70 多岁的老木匠师父学习——师父让他做的第一件事不是雕花、不是榫卯——而是"看阴影"——这个看似奇怪的训练改变了…...

别再死记硬背SMO公式了!用Python手写一个SVM分类器,带你一步步拆解SMO核心逻辑
用Python手写SVM分类器:代码驱动理解SMO算法核心在机器学习领域,支持向量机(SVM)以其优秀的分类性能和坚实的数学基础著称。然而,许多学习者在理解其核心算法——序列最小优化(SMO)时,往往被复杂的数学推导所困扰。本文将采用一种…...
:支持Anthropic API兼容、流式响应、模型热切换与RBAC权限隔离)
Claude本地化部署终极方案(企业级容器化全栈手册):支持Anthropic API兼容、流式响应、模型热切换与RBAC权限隔离
更多请点击: https://codechina.net 第一章:Claude本地化部署的架构全景与企业级价值定位 Claude本地化部署并非简单地将模型权重下载后运行,而是一套融合推理引擎优化、安全沙箱隔离、API网关治理与可观测性集成的端到端架构体系。其核心目…...