STM32存储左右互搏 SPI总线读写FLASH W25QXX
STM32存储左右互搏 SPI总线读写FLASH W25QXX
FLASH是常用的一种非易失存储单元,W25QXX系列Flash有不同容量的型号,如W25Q64的容量为64Mbit,也就是8MByte。这里介绍STM32CUBEIDE开发平台HAL库操作W25Q各型号FLASH的例程。
W25QXX介绍
W25QXX的SOIC封装如下所示,在采用SPI而不是QUAL SPI时,管脚定义为:

即由片选(/CS), 时钟(CLK), 数据输出(DO)和数据输入(DI)的组成4线SPI信号接口。VCC和GND提供电源和接地连接。
例程采用STM32H750VBT6芯片, FLASH可以选择为8/16/32/64/128/256/512/1024 Mbit的W25Q型号。
STM32工程配置
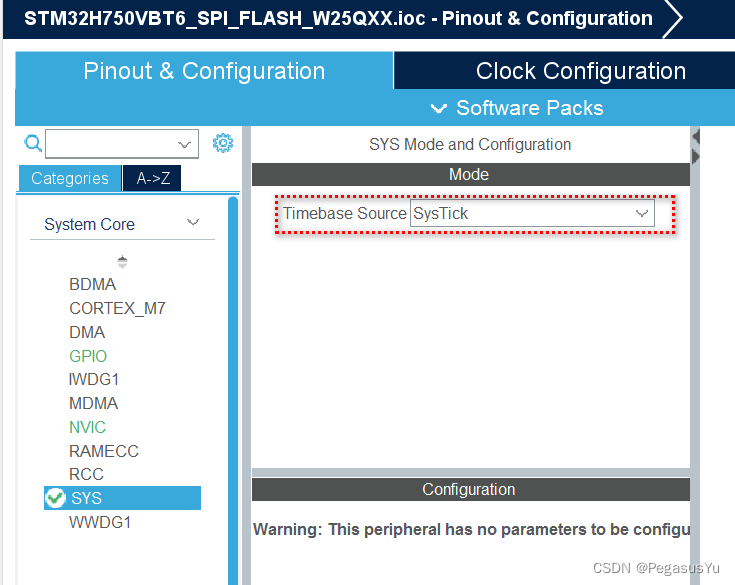
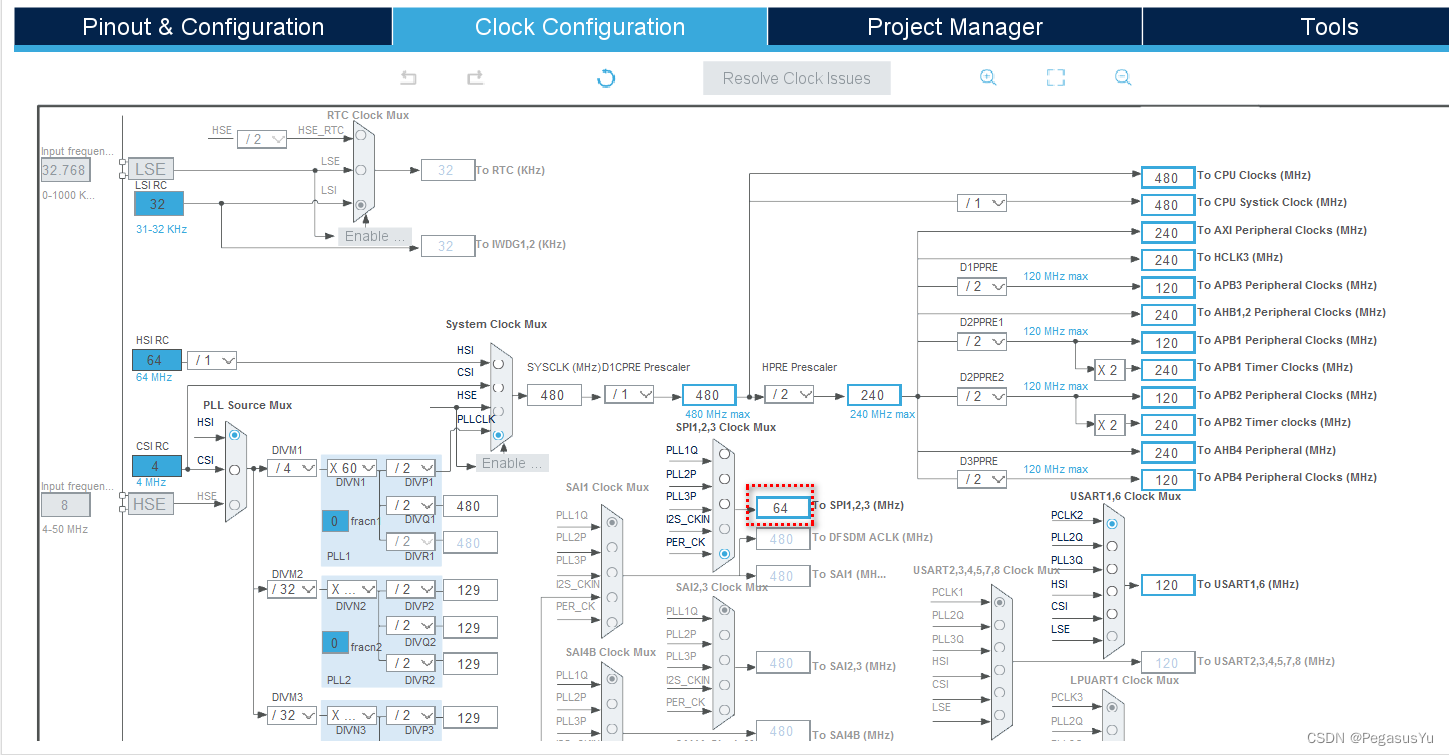
首先建立基本工程并设置时钟:
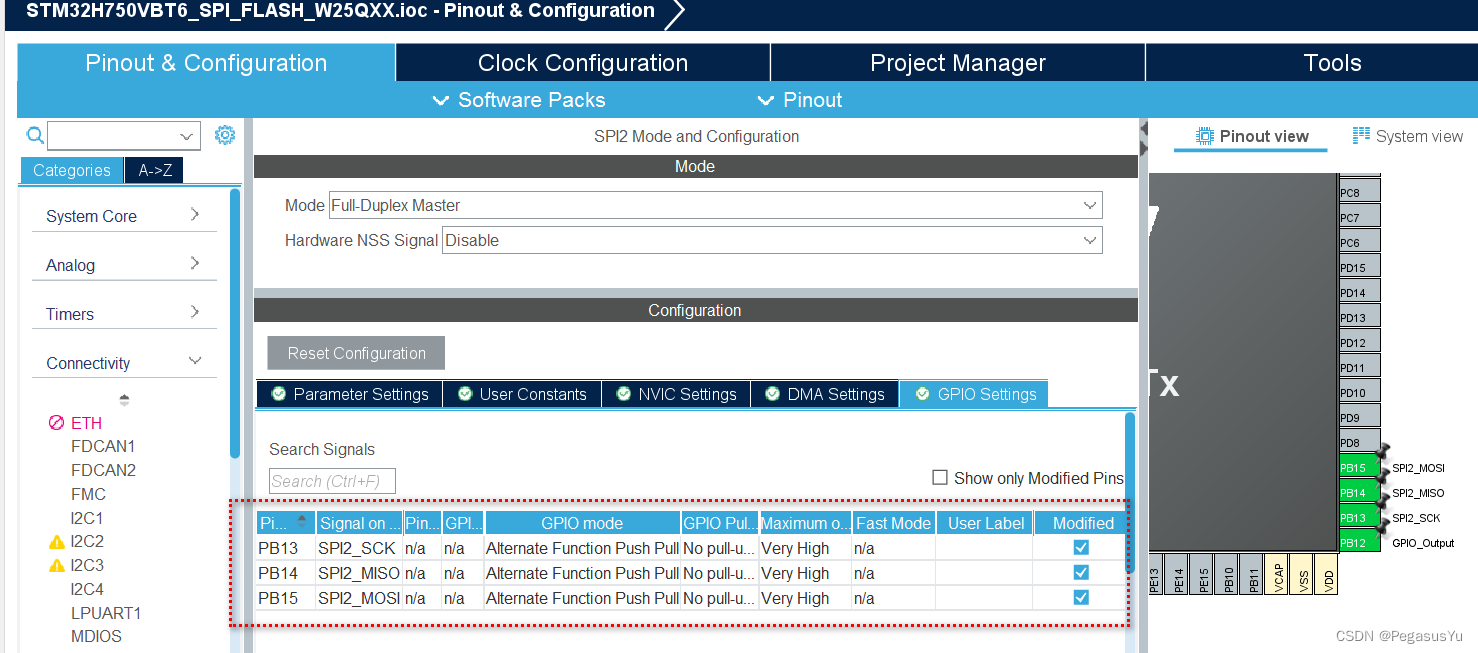
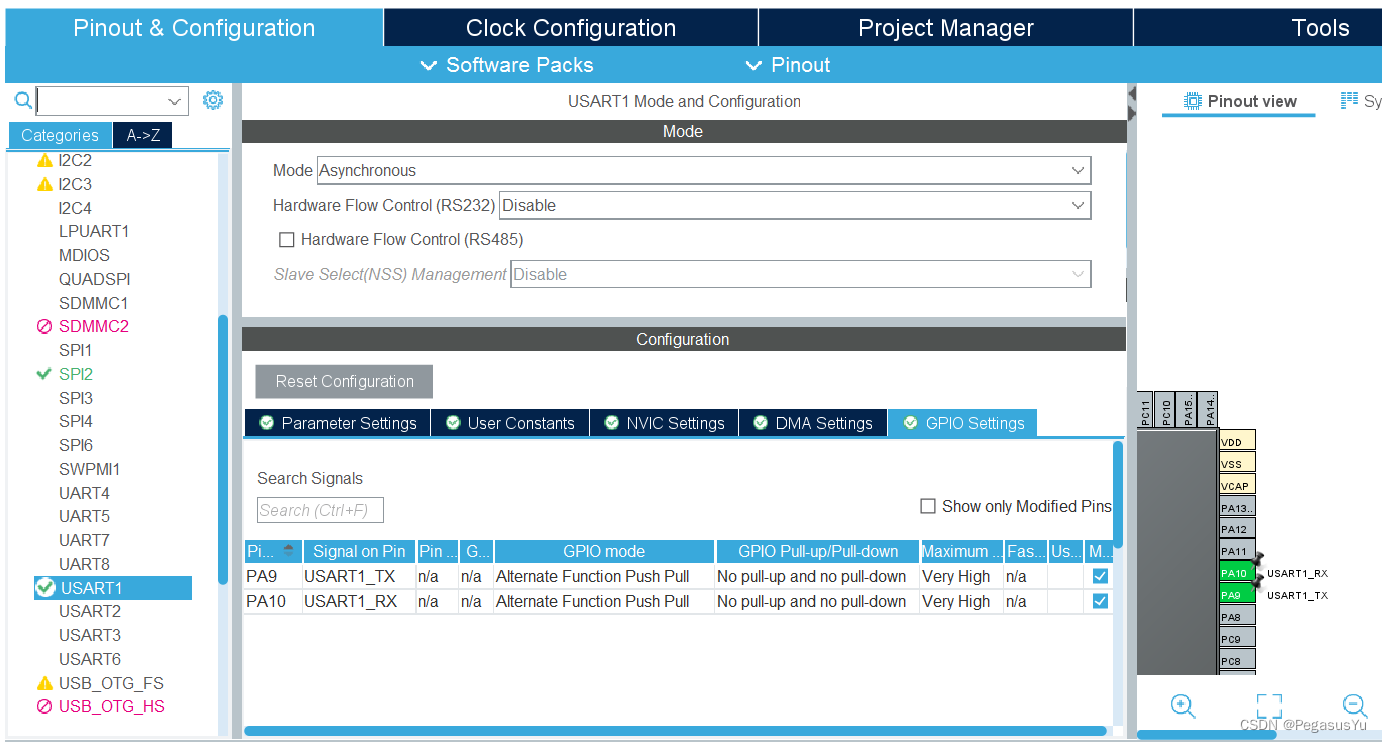
选择硬件接口SPI2为FLASH连接接口,片选采用软件代码控制方式,单独设置为输出GPIO:
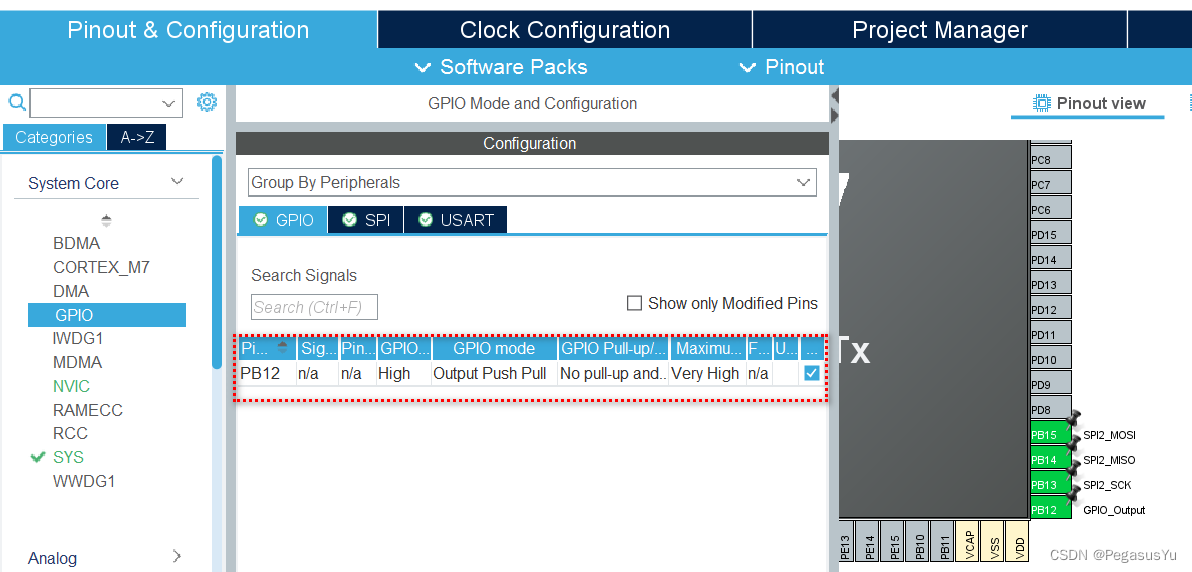
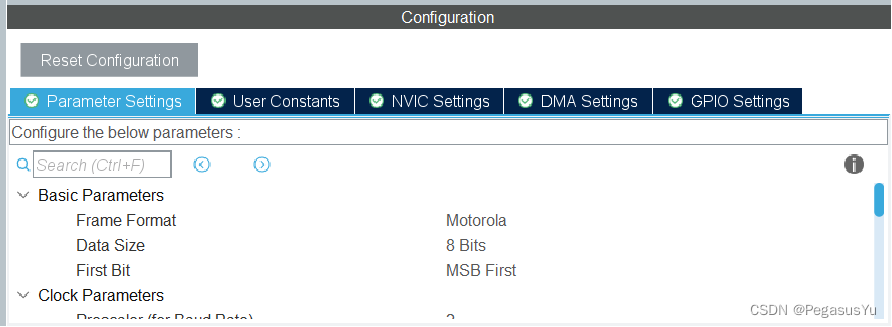
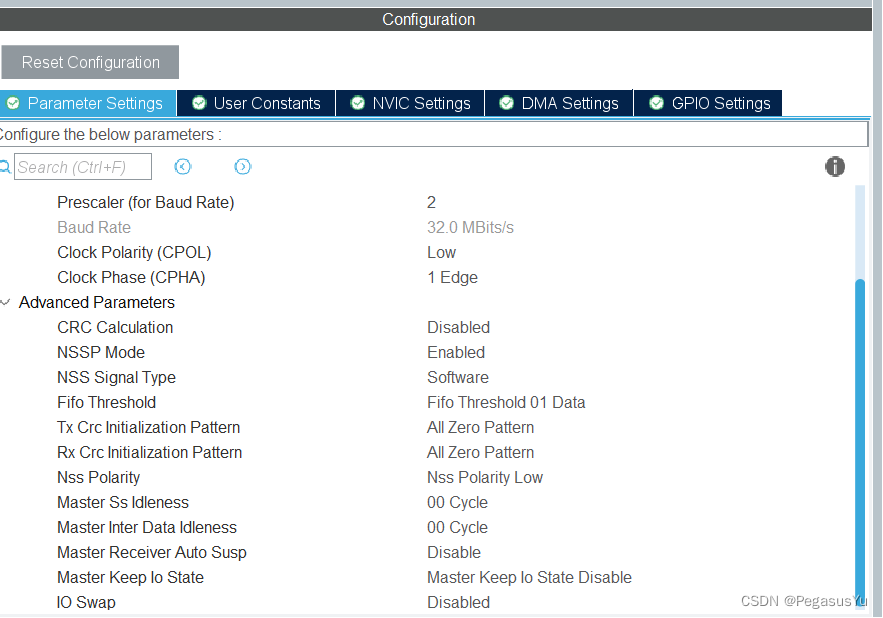
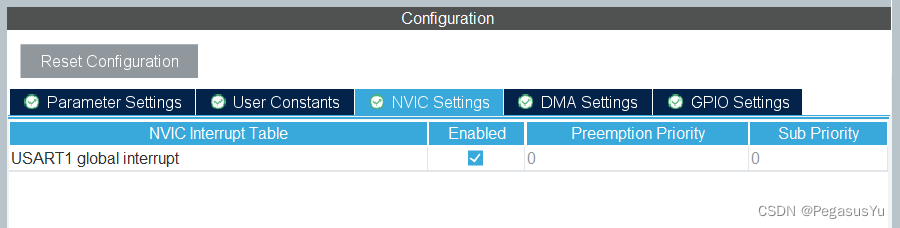
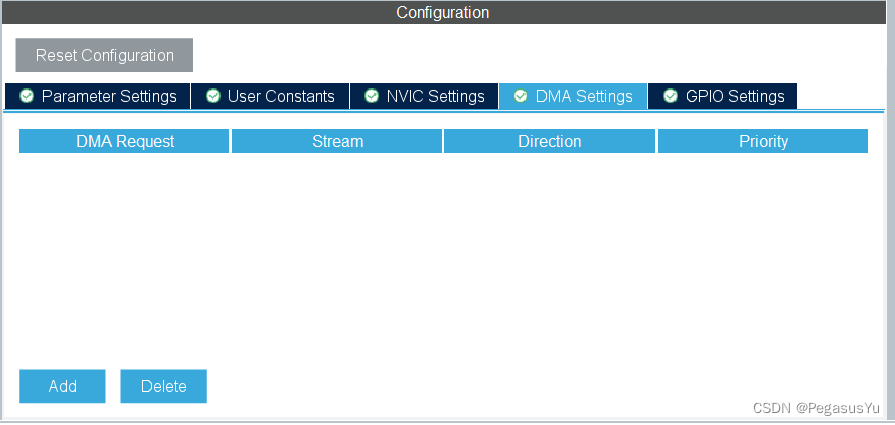
不采用中断和DMA方式,需要时可以再添加,调用相对应的操作库函数及补充中断处理函数即可。
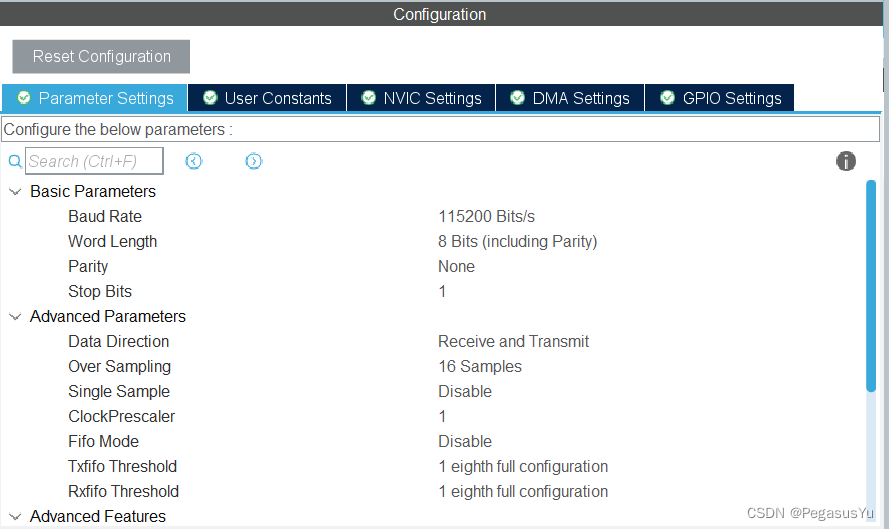
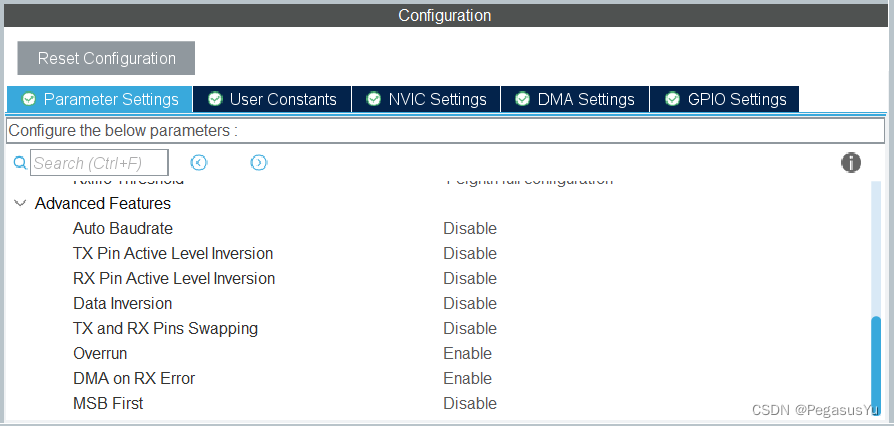
配置UART1用于控制打印:
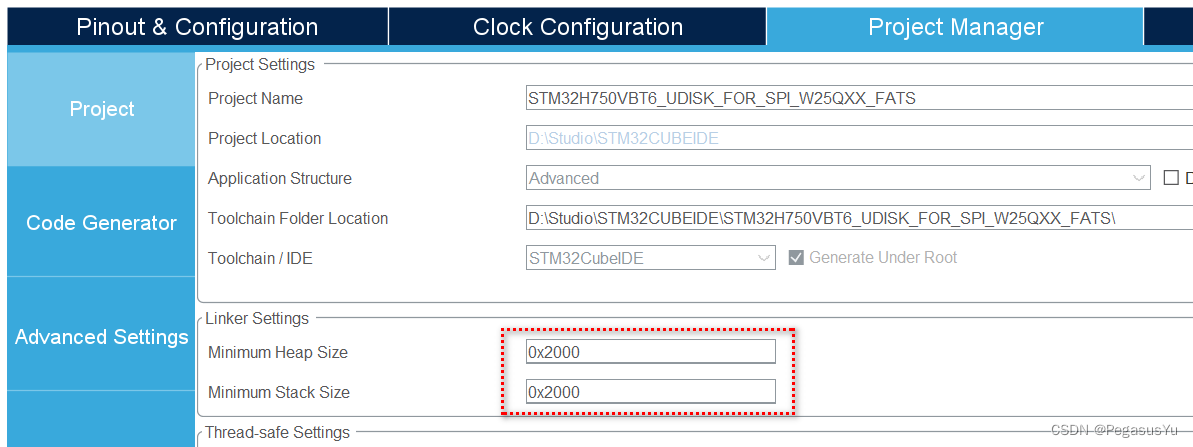
STM32H7资源较多,可以将堆栈开大:
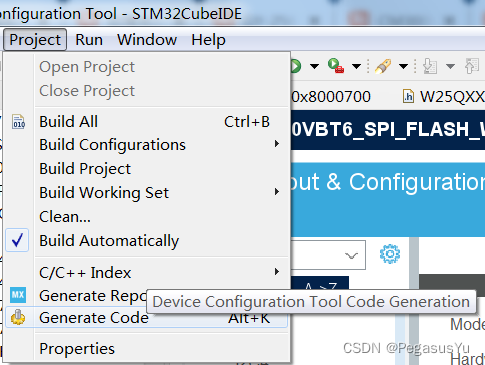
保存并生成初始工程代码:
STM32工程代码
UART串口printf打印输出实现参考:STM32 UART串口printf函数应用及浮点打印代码空间节省 (HAL)
建立W25Q访问的库头文件W25QXX.h:
#ifndef INC_W25QXX_H_
#define INC_W25QXX_H_#include "main.h"uint8_t SPI2_ReadWriteByte(uint8_t TxData);//W25QXX serial chip list:
#define W25Q20_ID 0XEF11
#define W25Q40_ID 0XEF12
#define W25Q80_ID 0XEF13
#define W25Q16_ID 0XEF14
#define W25Q32_ID 0XEF15
#define W25Q64_ID 0XEF16
#define W25Q128_ID 0XEF17
#define W25Q256_ID 0XEF18
#define W25Q512_ID 0XEF19
#define W25Q1024_ID 0XEF20extern uint16_t W25QXX_TYPE; //To indicate W25QXX type used in this procedure//W25QXX chip select control function
#define W25QXX_CS(n) ( n ? HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET) : HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_RESET) )//command table for W25QXX access
#define W25X_WriteEnable 0x06
#define W25X_WriteDisable 0x04
#define W25X_ReadStatusReg1 0x05
#define W25X_ReadStatusReg2 0x35
#define W25X_ReadStatusReg3 0x15
#define W25X_WriteStatusReg1 0x01
#define W25X_WriteStatusReg2 0x31
#define W25X_WriteStatusReg3 0x11
#define W25X_ReadData 0x03
#define W25X_FastReadData 0x0B
#define W25X_FastReadDual 0x3B
#define W25X_PageProgram 0x02
#define W25X_BlockErase 0xD8
#define W25X_SectorErase 0x20
#define W25X_ChipErase 0xC7
#define W25X_PowerDown 0xB9
#define W25X_ReleasePowerDown 0xAB
#define W25X_DeviceID 0xAB
#define W25X_ManufactDeviceID 0x90
#define W25X_JedecDeviceID 0x9F
#define W25X_Enable4ByteAddr 0xB7
#define W25X_Exit4ByteAddr 0xE9uint8_t W25QXX_Init(void);
uint16_t W25QXX_ReadID(void); //Read W25QXX ID
uint8_t W25QXX_ReadSR(uint8_t reg_num); //Read from status register
void W25QXX_4ByteAddr_Enable(void); //Enable 4-byte address mode
void W25QXX_Write_SR(uint8_t reg_num,uint8_t d); //Write to status register
void W25QXX_Write_Enable(void); //Write enable
void W25QXX_Write_Disable(void); //Write disable
void W25QXX_Write_NoCheck(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite); //Write operation w/o check
void W25QXX_Read(uint8_t* pBuffer,uint32_t ReadAddr,uint16_t NumByteToRead); //Read operation
void W25QXX_Write(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite); //Write operation
void W25QXX_Erase_Chip(void); //Erase whole chip
void W25QXX_Erase_Sector(uint32_t Sector_Num); //Erase sector in specific sector number
void W25QXX_Wait_Busy(void); //Wait idle status before next operation
void W25QXX_PowerDown(void); //Enter power-down mode
void W25QXX_WAKEUP(void); //Wake-up#endif /* INC_W25QXX_H_ */建立W25Q访问的库源文件W25QXX.c:
#include "W25QXX.h"extern SPI_HandleTypeDef hspi2;
extern void PY_Delay_us_t(uint32_t Delay);
//Write and read one byte in SPI2
uint8_t SPI2_ReadWriteByte(uint8_t TxData)
{uint8_t Rxdata;HAL_SPI_TransmitReceive(&hspi2,&TxData,&Rxdata,1, 1000);return Rxdata;
}uint16_t W25QXX_TYPE=W25Q64_ID;//W25QXX initialization
uint8_t W25QXX_Init(void)
{uint8_t temp;W25QXX_CS(1);W25QXX_TYPE=W25QXX_ReadID();if((W25QXX_TYPE==W25Q256_ID)||(W25QXX_TYPE==W25Q512_ID)||(W25QXX_TYPE==W25Q1024_ID)){temp=W25QXX_ReadSR(3); //read status register 3if((temp&0X01)==0) //judge address mode and configure to 4-byte address mode{W25QXX_CS(0);SPI2_ReadWriteByte(W25X_Enable4ByteAddr);W25QXX_CS(1);}}if((W25QXX_TYPE==0x0000)||(W25QXX_TYPE==0xFFFF)) return 0;else return 1;
}//Read status registers of W25QXX
//reg_num: register number from 1 to 3
//return: value of selected register//SR1 (default 0x00):
//BIT7 6 5 4 3 2 1 0
//SPR RV TB BP2 BP1 BP0 WEL BUSY
//SPR: default 0, status register protection bit used with WP
//TB,BP2,BP1,BP0: FLASH region write protection configuration
//WEL: write enable lock
//BUSY: busy flag (1: busy; 0: idle)//SR2:
//BIT7 6 5 4 3 2 1 0
//SUS CMP LB3 LB2 LB1 (R) QE SRP1//SR3:
//BIT7 6 5 4 3 2 1 0
//HOLD/RST DRV1 DRV0 (R) (R) WPS ADP ADS
uint8_t W25QXX_ReadSR(uint8_t reg_num)
{uint8_t byte=0,command=0;switch(reg_num){case 1:command=W25X_ReadStatusReg1; //To read status register 1break;case 2:command=W25X_ReadStatusReg2; //To read status register 2break;case 3:command=W25X_ReadStatusReg3; //To read status register 3break;default:command=W25X_ReadStatusReg1;break;}W25QXX_CS(0);SPI2_ReadWriteByte(command); //send commandbyte=SPI2_ReadWriteByte(0Xff); //read dataW25QXX_CS(1);return byte;
}//Write status registers of W25QXX
//reg_num: register number from 1 to 3
//d: data for updating status register
void W25QXX_Write_SR(uint8_t reg_num,uint8_t d)
{uint8_t command=0;switch(reg_num){case 1:command=W25X_WriteStatusReg1; //To write status register 1break;case 2:command=W25X_WriteStatusReg2; //To write status register 2break;case 3:command=W25X_WriteStatusReg3; //To write status register 3break;default:command=W25X_WriteStatusReg1;break;}W25QXX_CS(0);SPI2_ReadWriteByte(command); //send commandSPI2_ReadWriteByte(d); //write dataW25QXX_CS(1);
}
//W25QXX write enable
void W25QXX_Write_Enable(void)
{W25QXX_CS(0);SPI2_ReadWriteByte(W25X_WriteEnable);W25QXX_CS(1);
}
//W25QXX write disable
void W25QXX_Write_Disable(void)
{W25QXX_CS(0);SPI2_ReadWriteByte(W25X_WriteDisable);W25QXX_CS(1);
}//Read chip ID
//return:
//0XEF11 for W25Q20
//0XEF12 for W25Q40
//0XEF13 for W25Q80
//0XEF14 for W25Q16
//0XEF15 for W25Q32
//0XEF16 for W25Q64
//0XEF17 for W25Q128
//0XEF18 for W25Q256
uint16_t W25QXX_ReadID(void)
{uint16_t Temp = 0;W25QXX_CS(0);SPI2_ReadWriteByte(0x90); //send commandSPI2_ReadWriteByte(0x00);SPI2_ReadWriteByte(0x00);SPI2_ReadWriteByte(0x00);Temp|=SPI2_ReadWriteByte(0xFF)<<8; //read high byte dataTemp|=SPI2_ReadWriteByte(0xFF); //read low byte dataW25QXX_CS(1);return Temp;
}
//Read W25QXX from specific address for specific byte length
//pBuffer: data buffer
//ReadAddr: specific address
//NumByteToRead: specific byte length (max 65535)
void W25QXX_Read(uint8_t* pBuffer,uint32_t ReadAddr,uint16_t NumByteToRead)
{uint16_t i;W25QXX_CS(0);SPI2_ReadWriteByte(W25X_ReadData); //send read commandif((W25QXX_TYPE==W25Q256_ID)||(W25QXX_TYPE==W25Q512_ID)||(W25QXX_TYPE==W25Q1024_ID)) //send highest 8-bit address{SPI2_ReadWriteByte((uint8_t)((ReadAddr)>>24));}SPI2_ReadWriteByte((uint8_t)((ReadAddr)>>16)); //send 24-bit addressSPI2_ReadWriteByte((uint8_t)((ReadAddr)>>8));SPI2_ReadWriteByte((uint8_t)ReadAddr);for(i=0;i<NumByteToRead;i++){pBuffer[i]=SPI2_ReadWriteByte(0XFF); //read data}W25QXX_CS(1);
}//Write W25QXX not more than 1 page (256 bytes)
//pBuffer: data buffer
//WriteAddr: specific address
//NumByteToWrite: specific byte length (max 256)
void W25QXX_Write_Page(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{uint16_t i;W25QXX_Write_Enable(); //write enableW25QXX_CS(0);SPI2_ReadWriteByte(W25X_PageProgram); //send write commandif((W25QXX_TYPE==W25Q256_ID)||(W25QXX_TYPE==W25Q512_ID)||(W25QXX_TYPE==W25Q1024_ID)) //send highest 8-bit address{SPI2_ReadWriteByte((uint8_t)((WriteAddr)>>24));}SPI2_ReadWriteByte((uint8_t)((WriteAddr)>>16)); //send 24-bit addressSPI2_ReadWriteByte((uint8_t)((WriteAddr)>>8));SPI2_ReadWriteByte((uint8_t)WriteAddr);for(i=0;i<NumByteToWrite;i++)SPI2_ReadWriteByte(pBuffer[i]); //write dataW25QXX_CS(1);W25QXX_Wait_Busy();
}//Write W25QXX w/o erase check and w/o byte number restriction
//pBuffer: data buffer
//WriteAddr: specific address
//NumByteToWrite: specific byte length (max 65535)
void W25QXX_Write_NoCheck(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{uint16_t remained_byte_num_in_page;remained_byte_num_in_page=256-WriteAddr%256; //remained byte number in pageif( NumByteToWrite <= remained_byte_num_in_page ) remained_byte_num_in_page = NumByteToWrite; //data can be written in single pagewhile(1){W25QXX_Write_Page(pBuffer,WriteAddr,remained_byte_num_in_page);if(NumByteToWrite==remained_byte_num_in_page)break; //end write operationelse //NumByteToWrite>remained_byte_num_in_page{pBuffer+=remained_byte_num_in_page;WriteAddr+=remained_byte_num_in_page;NumByteToWrite-=remained_byte_num_in_page;if(NumByteToWrite>256)remained_byte_num_in_page=256; //for whole page writeelse remained_byte_num_in_page=NumByteToWrite; //for non-whole page write}};
}//Write W25QXX w/ erase after check and w/o byte number restriction
//pBuffer: data buffer
//WriteAddr: specific address
//NumByteToWrite: specific byte length (max 65535)
uint8_t W25QXX_BUFFER[4096];
void W25QXX_Write(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{uint32_t secpos;uint16_t secoff;uint16_t secremain;uint16_t i;uint8_t * W25QXX_BUF;W25QXX_BUF=W25QXX_BUFFER;secpos=WriteAddr/4096; //sector number (16 pages for 1 sector) for destination addresssecoff=WriteAddr%4096; //offset address in sector for destination addresssecremain=4096-secoff; //remained space for sectorif(NumByteToWrite<=secremain)secremain=NumByteToWrite; //data can be written in single sectorwhile(1){W25QXX_Read(W25QXX_BUF,secpos*4096,4096); //read sector data for ease necessity judgmentfor(i=0;i<secremain;i++) //check sector data status{if(W25QXX_BUF[secoff+i]!=0XFF) break; //ease necessary}if(i<secremain) //for ease{W25QXX_Erase_Sector(secpos); //ease sectorfor(i=0;i<secremain;i++) //data copy{W25QXX_BUF[i+secoff]=pBuffer[i];}W25QXX_Write_NoCheck(W25QXX_BUF,secpos*4096,4096); //write sector}else W25QXX_Write_NoCheck(pBuffer,WriteAddr,secremain); //write data for sector unnecessary to eraseif(NumByteToWrite==secremain)break; //for operation endelse //for operation continuing{secpos++; //sector number + 1secoff=0; //offset address from 0pBuffer+=secremain; //pointer adjustmentWriteAddr+=secremain; //write address adjustmentNumByteToWrite-=secremain; //write number adjustmentif(NumByteToWrite>4096) secremain=4096; //not last sectorelse secremain=NumByteToWrite; //last sector}};
}//Erase whole chip, long waiting...
void W25QXX_Erase_Chip(void)
{W25QXX_Write_Enable(); //write enableW25QXX_Wait_Busy();W25QXX_CS(0);SPI2_ReadWriteByte(W25X_ChipErase); //send erase commandW25QXX_CS(1);W25QXX_Wait_Busy(); //wait for erase complete
}//Erase one sector
//Sector_Num: sector number
void W25QXX_Erase_Sector(uint32_t Sector_Num)
{Sector_Num*=4096;W25QXX_Write_Enable(); //write enableW25QXX_Wait_Busy();W25QXX_CS(0);SPI2_ReadWriteByte(W25X_SectorErase); //send erase commandif((W25QXX_TYPE==W25Q256_ID)||(W25QXX_TYPE==W25Q512_ID)||(W25QXX_TYPE==W25Q1024_ID)) //send highest 8-bit address{SPI2_ReadWriteByte((uint8_t)((Sector_Num)>>24));}SPI2_ReadWriteByte((uint8_t)((Sector_Num)>>16)); //send 24-bit addressSPI2_ReadWriteByte((uint8_t)((Sector_Num)>>8));SPI2_ReadWriteByte((uint8_t)Sector_Num);W25QXX_CS(1);W25QXX_Wait_Busy(); //wait for erase complete
}//Wait idle status before next operation
void W25QXX_Wait_Busy(void)
{while((W25QXX_ReadSR(1)&0x01)==0x01); //wait for busy flag cleared
}//Enter power-down mode
#define tDP_us 3
void W25QXX_PowerDown(void)
{W25QXX_CS(0);SPI2_ReadWriteByte(W25X_PowerDown); //send power-down commandW25QXX_CS(1);PY_Delay_us_t(tDP_us); //tDP
}
//Wake-up
#define tRES1_us 3
void W25QXX_WAKEUP(void)
{W25QXX_CS(0);SPI2_ReadWriteByte(W25X_ReleasePowerDown);//send release power-down commandW25QXX_CS(1);PY_Delay_us_t(tRES1_us); //tRES1
}main.c文件操作代码里实现串口接收1个字节的指令,实现FLASH的ID读取,一页的写入,一页的读出三个功能。其它功能可以根据需要自行增加。
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
//Written by Pegasus Yu in 2023
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
#include "W25QXX.h"
#include <string.h>
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
__IO float usDelayBase;
void PY_usDelayTest(void)
{__IO uint32_t firstms, secondms;__IO uint32_t counter = 0;firstms = HAL_GetTick()+1;secondms = firstms+1;while(uwTick!=firstms) ;while(uwTick!=secondms) counter++;usDelayBase = ((float)counter)/1000;
}void PY_Delay_us_t(uint32_t Delay)
{__IO uint32_t delayReg;__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);delayReg = 0;while(delayReg!=usNum) delayReg++;
}void PY_usDelayOptimize(void)
{__IO uint32_t firstms, secondms;__IO float coe = 1.0;firstms = HAL_GetTick();PY_Delay_us_t(1000000) ;secondms = HAL_GetTick();coe = ((float)1000)/(secondms-firstms);usDelayBase = coe*usDelayBase;
}void PY_Delay_us(uint32_t Delay)
{__IO uint32_t delayReg;__IO uint32_t msNum = Delay/1000;__IO uint32_t usNum = (uint32_t)((Delay%1000)*usDelayBase);if(msNum>0) HAL_Delay(msNum);delayReg = 0;while(delayReg!=usNum) delayReg++;
}
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*/SPI_HandleTypeDef hspi2;UART_HandleTypeDef huart1;/* USER CODE BEGIN PV */
uint8_t uart1_rx[16];
uint8_t cmd;
uint32_t Flash_Access_Addr = 0;
/* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
void PeriphCommonClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
static void MX_SPI2_Init(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
#define page_byte_size 256
uint8_t sdbuffer[page_byte_size];
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* Configure the peripherals common clocks */PeriphCommonClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();MX_SPI2_Init();/* USER CODE BEGIN 2 */PY_usDelayTest();PY_usDelayOptimize();HAL_UART_Receive_IT(&huart1, uart1_rx, 1);W25QXX_Init();/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){if(cmd==1) //Read ID{cmd = 0;printf("FLASH ID=0x%x\r\n\r\n", W25QXX_ReadID());printf("W25Q80_ID: 0XEF13\r\n");printf("W25Q16_ID: 0XEF14\r\n");printf("W25Q32_ID: 0XEF15\r\n");printf("W25Q64_ID: 0XEF16\r\n");printf("W25Q128_ID: 0XEF17\r\n");printf("W25Q256_ID: 0XEF18\r\n");printf("W25Q512_ID: 0XEF18\r\n");printf("W25Q1024_ID: 0XEF20\r\n");}if(cmd==2) //Write one page{cmd = 0;for(uint32_t i=0;i<page_byte_size;i++){sdbuffer[i]=i;}Flash_Access_Addr = 0;W25QXX_Write(sdbuffer, Flash_Access_Addr, page_byte_size);printf("Write to W25Q6XX done!\r\n");}if(cmd==3)//Read one page{cmd = 0;memset(sdbuffer, 0, page_byte_size);printf("Start to read W25QXX......\r\n");Flash_Access_Addr = 0;W25QXX_Read(sdbuffer, Flash_Access_Addr, page_byte_size);for(uint32_t i=0; i<page_byte_size; i++){printf("%d ", sdbuffer[i]);}printf("\r\n");}/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Supply configuration update enable*/HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);/** Configure the main internal regulator output voltage*/__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}__HAL_RCC_SYSCFG_CLK_ENABLE();__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE0);while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;RCC_OscInitStruct.HSIState = RCC_HSI_DIV1;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;RCC_OscInitStruct.PLL.PLLM = 4;RCC_OscInitStruct.PLL.PLLN = 60;RCC_OscInitStruct.PLL.PLLP = 2;RCC_OscInitStruct.PLL.PLLQ = 2;RCC_OscInitStruct.PLL.PLLR = 2;RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_3;RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;RCC_OscInitStruct.PLL.PLLFRACN = 0;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK){Error_Handler();}
}/*** @brief Peripherals Common Clock Configuration* @retval None*/
void PeriphCommonClock_Config(void)
{RCC_PeriphCLKInitTypeDef PeriphClkInitStruct = {0};/** Initializes the peripherals clock*/PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_CKPER;PeriphClkInitStruct.CkperClockSelection = RCC_CLKPSOURCE_HSI;if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK){Error_Handler();}
}/*** @brief SPI2 Initialization Function* @param None* @retval None*/
static void MX_SPI2_Init(void)
{/* USER CODE BEGIN SPI2_Init 0 *//* USER CODE END SPI2_Init 0 *//* USER CODE BEGIN SPI2_Init 1 *//* USER CODE END SPI2_Init 1 *//* SPI2 parameter configuration*/hspi2.Instance = SPI2;hspi2.Init.Mode = SPI_MODE_MASTER;hspi2.Init.Direction = SPI_DIRECTION_2LINES;hspi2.Init.DataSize = SPI_DATASIZE_8BIT;hspi2.Init.CLKPolarity = SPI_POLARITY_LOW;hspi2.Init.CLKPhase = SPI_PHASE_1EDGE;hspi2.Init.NSS = SPI_NSS_SOFT;hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_2;hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB;hspi2.Init.TIMode = SPI_TIMODE_DISABLE;hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;hspi2.Init.CRCPolynomial = 0x0;hspi2.Init.NSSPMode = SPI_NSS_PULSE_ENABLE;hspi2.Init.NSSPolarity = SPI_NSS_POLARITY_LOW;hspi2.Init.FifoThreshold = SPI_FIFO_THRESHOLD_01DATA;hspi2.Init.TxCRCInitializationPattern = SPI_CRC_INITIALIZATION_ALL_ZERO_PATTERN;hspi2.Init.RxCRCInitializationPattern = SPI_CRC_INITIALIZATION_ALL_ZERO_PATTERN;hspi2.Init.MasterSSIdleness = SPI_MASTER_SS_IDLENESS_00CYCLE;hspi2.Init.MasterInterDataIdleness = SPI_MASTER_INTERDATA_IDLENESS_00CYCLE;hspi2.Init.MasterReceiverAutoSusp = SPI_MASTER_RX_AUTOSUSP_DISABLE;hspi2.Init.MasterKeepIOState = SPI_MASTER_KEEP_IO_STATE_DISABLE;hspi2.Init.IOSwap = SPI_IO_SWAP_DISABLE;if (HAL_SPI_Init(&hspi2) != HAL_OK){Error_Handler();}/* USER CODE BEGIN SPI2_Init 2 *//* USER CODE END SPI2_Init 2 */}/*** @brief USART1 Initialization Function* @param None* @retval None*/
static void MX_USART1_UART_Init(void)
{/* USER CODE BEGIN USART1_Init 0 *//* USER CODE END USART1_Init 0 *//* USER CODE BEGIN USART1_Init 1 *//* USER CODE END USART1_Init 1 */huart1.Instance = USART1;huart1.Init.BaudRate = 115200;huart1.Init.WordLength = UART_WORDLENGTH_8B;huart1.Init.StopBits = UART_STOPBITS_1;huart1.Init.Parity = UART_PARITY_NONE;huart1.Init.Mode = UART_MODE_TX_RX;huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart1.Init.OverSampling = UART_OVERSAMPLING_16;huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;huart1.Init.ClockPrescaler = UART_PRESCALER_DIV1;huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;if (HAL_UART_Init(&huart1) != HAL_OK){Error_Handler();}if (HAL_UARTEx_SetTxFifoThreshold(&huart1, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK){Error_Handler();}if (HAL_UARTEx_SetRxFifoThreshold(&huart1, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK){Error_Handler();}if (HAL_UARTEx_DisableFifoMode(&huart1) != HAL_OK){Error_Handler();}/* USER CODE BEGIN USART1_Init 2 *//* USER CODE END USART1_Init 2 */}/*** @brief GPIO Initialization Function* @param None* @retval None*/
static void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/* GPIO Ports Clock Enable */__HAL_RCC_GPIOB_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET);/*Configure GPIO pin : PB12 */GPIO_InitStruct.Pin = GPIO_PIN_12;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);}/* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if(huart==&huart1){cmd = uart1_rx[0];HAL_UART_Receive_IT(&huart1, uart1_rx, 1);}}
/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */STM32例程测试
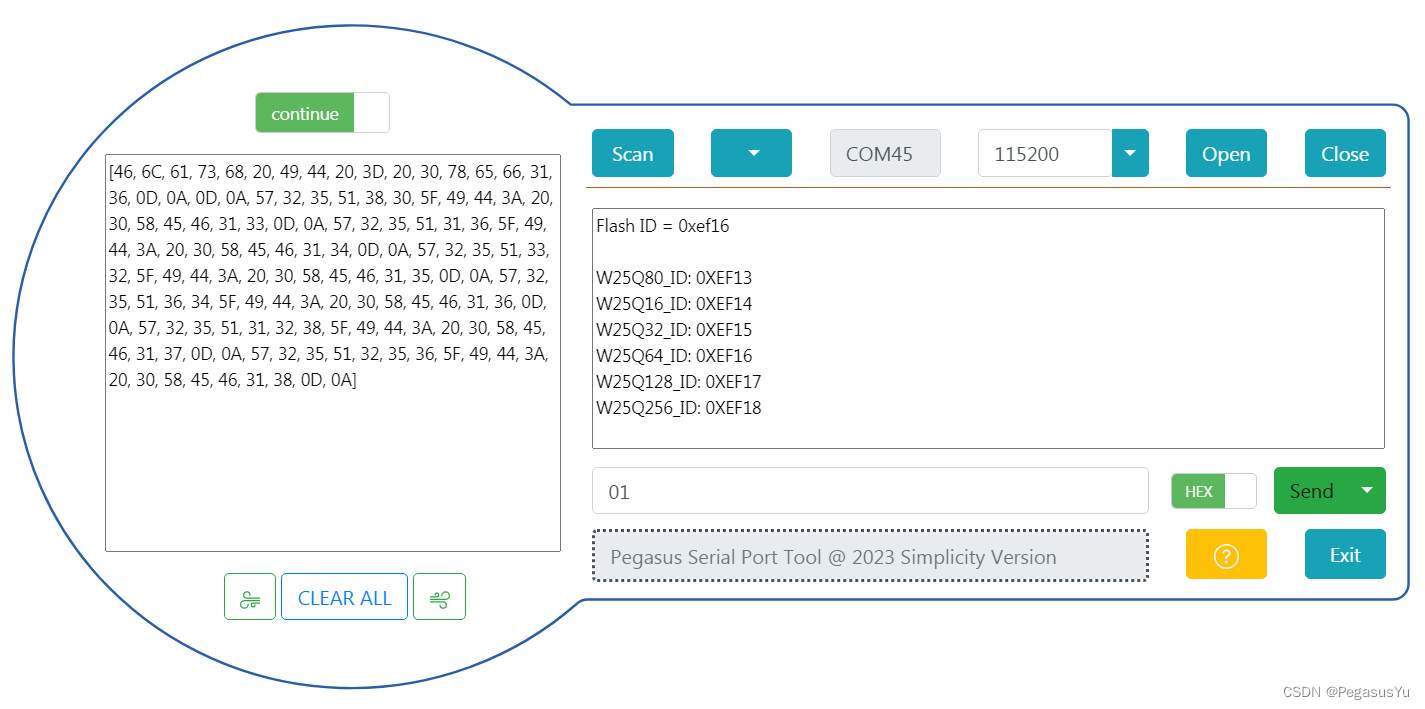
串口指令0x01测试效果如下:
串口指令0x02测试效果如下:
串口指令0x03测试效果如下:
STM32例程下载
STM32H750VBT6读写W25QXX例程下载
–End–
相关文章:
STM32存储左右互搏 SPI总线读写FLASH W25QXX
STM32存储左右互搏 SPI总线读写FLASH W25QXX FLASH是常用的一种非易失存储单元,W25QXX系列Flash有不同容量的型号,如W25Q64的容量为64Mbit,也就是8MByte。这里介绍STM32CUBEIDE开发平台HAL库操作W25Q各型号FLASH的例程。 W25QXX介绍 W25QX…...

【EI会议征稿】第四届计算机网络安全与软件工程国际学术会议(CNSSE 2024)
第四届计算机网络安全与软件工程国际学术会议(CNSSE 2024) 2024 4th International Conference on Computer Network Security and Software Engineering 第四届计算机网络安全与软件工程国际学术会议(CNSSE 2024)将于2024年2月…...

解决pip 安装 pyhash错误
1 pip 安装 pyhash错误 Collecting pyhash (from Calvin0.0.1) Using cached https://pypi.tuna.tsinghua.edu.cn/packages/f0/bf/4db9bed05d10824a17697f65063de19892ca2171a31a9c6854f9bbf55c02/pyhash-0.9.3.tar.gz (602 kB) Preparing metadata (setup.py) … error error:…...
解决 win11 vmware 中centos 网络不能访问外网
解决 win11 vmware 中centos 网络不能访问外网 1、进入win11 高级设置,找到centos 虚拟机使用的网卡 2、看网卡的其他属性 3、按照红圈部分,配置成一样的就行 4、进入到虚拟机配置中,配置成如图一样的NAT模式 5、再进入编辑 -》虚拟网络编辑…...

Flutter vs 前端 杂谈:SliverAppBar、手动实现Appbar、前端Html+JS怎么实现滚动变化型Appbar - 比较
Flutter vs 前端 杂谈 SliverAppBar的弹性背景的显隐效果使用HtmlJS怎么实现 作者:李俊才 (jcLee95):https://blog.csdn.net/qq_28550263 邮箱 :291148484163.com 本文地址:https://blog.csdn.net/qq_28550…...
Qt 二维码生成与识别
1.简介 QZXing是一个基于Qt框架的二维码解码库,它是对ZXing(Zebra Crossing)开源项目的一个Qt封装。ZXing是一个功能强大的开源二维码解码库,支持多种类型的码,包括QR码、DataMatrix码、Aztec码等。 QZXing提供了一个…...
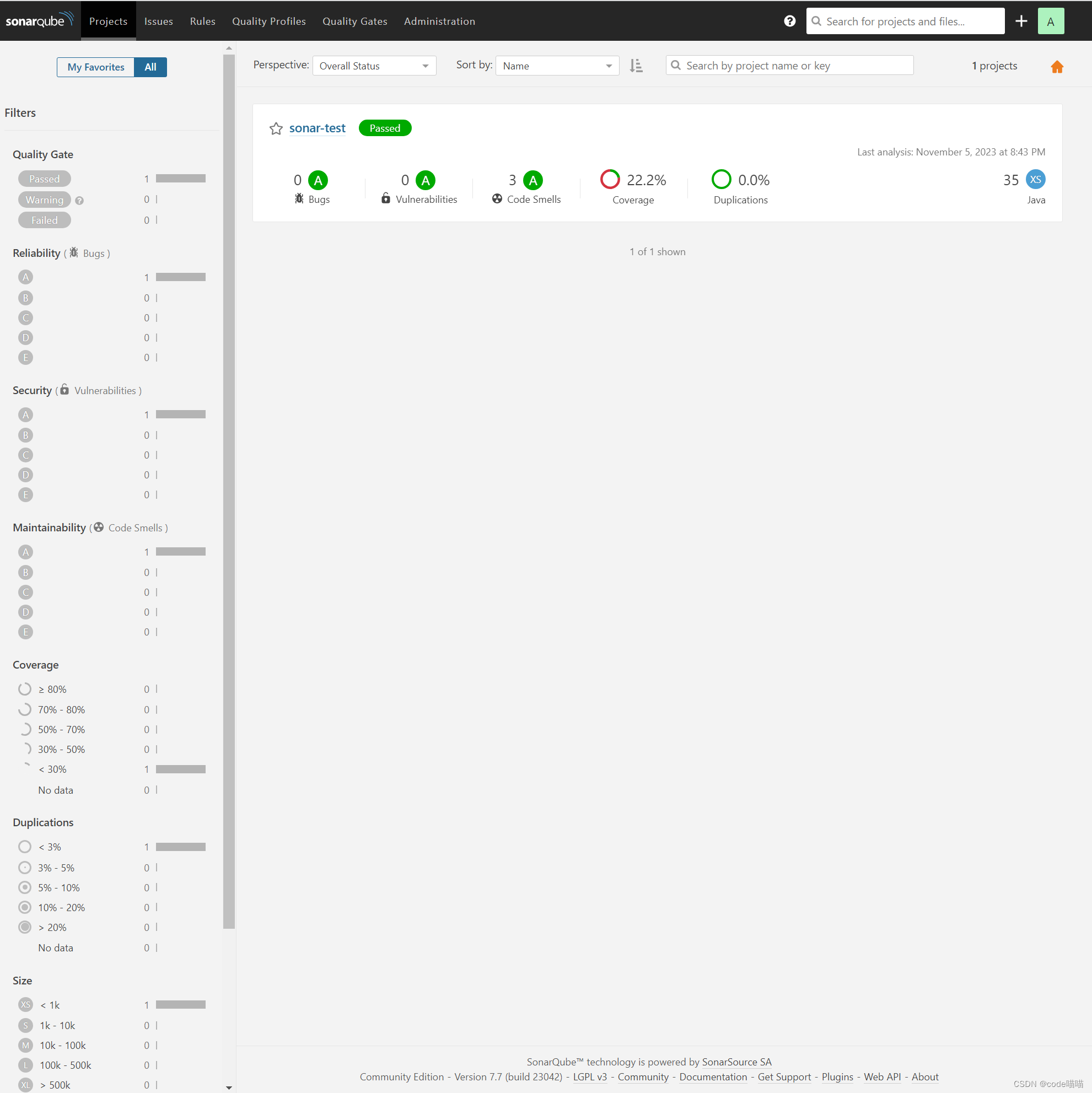
jacoco和sonar
目录 jacoco 引入依赖 构建配置修改 单元测试 生成报告 查看报告 报告说明 1. Instructions 2. Branches 3. Cyclomatic Complexity 4. Lines 5. Methods 6. Classes sonar7.7 基础环境 需要下载软件 解压文件并配置 运行启动 jacoco 引入依赖 <dep…...

Django系列之Serializer的source参数使用、自定义序列化方法
数据准备 models.py from django.contrib.auth.models import AbstractUser from django.db import modelsclass Publish(models.Model):name models.CharField(max_length32)city models.CharField(max_length8)email models.CharField(max_length32)def __str__(self):r…...

Java从入门到精通
Java从入门到精通 1. Java概述1.1 Java是什么1.2 为什么用Java1.3 Java能做什么1.4 Java技术体系平台2. Java快速入门2.1 Java开发环境的准备:JDK简介、安装、常用命令如何使用JavaJDK产品的发展史获取JDK如何验证能用javac和java其他常用命令行命令2.2 Java入门程序-HelloWor…...
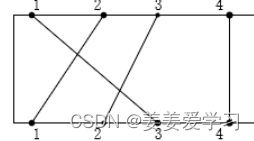
电路布线问题动态规划详解(做题思路)
对于电路布线问题,想必学过动态规划的大家都很清除。今天就来讲解一下这个动态规划经典题目。 目录 问题描述输入分析最优子结构代码 问题描述 在一块电路板的上、下2端分别有n个接线柱。根据电路设计,要求用导 线(i,π(i))将上端接线柱与下端接线柱相…...

webpack 的 Loader 和 Plugin 的区别,常见的 loader 和 plugin 有哪些?
结论先行: 1、 Loader 和 Plugin 的区别 Loader 也叫做就是“加载器”,因为 webpack 原生只能解析 js 文件,而对于其他类型文件,则需要借助 loader。所以 loader 的作用就是实现对不同格式文件的解析和处理,例如把 E…...
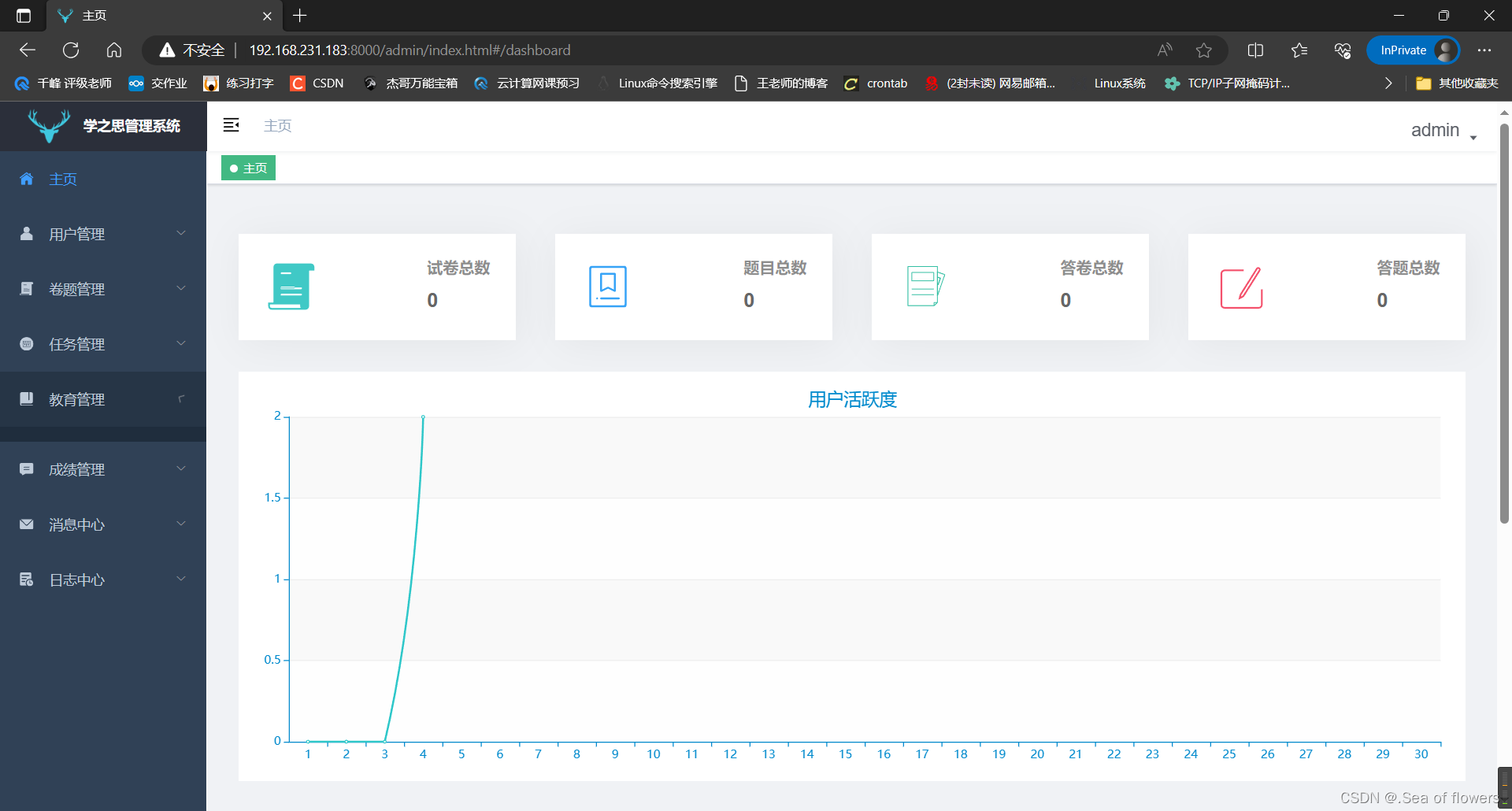
云计算实战项目之---学之思在线考试系统
简介: 学之思开源考试系统是一款 java vue 的前后端分离的考试系统。主要优点是开发、部署简单快捷、界面设计友好、代码结构清晰。支持web端和微信小程序,能覆盖到pc机和手机等设备。 支持多种部署方式:集成部署、前后端分离部署、docker部…...
)
研究生学术与职业素养讲座MOOC---期末复习(1-15)
目录 单选题多选题填空题判断题 单选题 我国制造科学与技术与工业发达国家相比的阶段性差距不包括:人工成本高不属于面向产业的学科:哲学哪个国际前沿本讲未提:纳米技术早期的科学研究不分学科是以达芬奇为例说的待遇不是管理者与领导者的区…...

kube-prometheus-stack监控k8s1.24+ docker缺少图像
1.24 中 cAdvisor 指标中缺少图像、名称和容器标签 由于 Kubernetes 1.24 已经从 cadvisor 中删除了 docker 插件,因此虽然可以使用 cri-dockerd 来适配容器运行时,但 cadvisor 无法获取有关图像标签等 docker 容器信息。进而导致 grafana 很多图像无数据。解决方法为对 pro…...
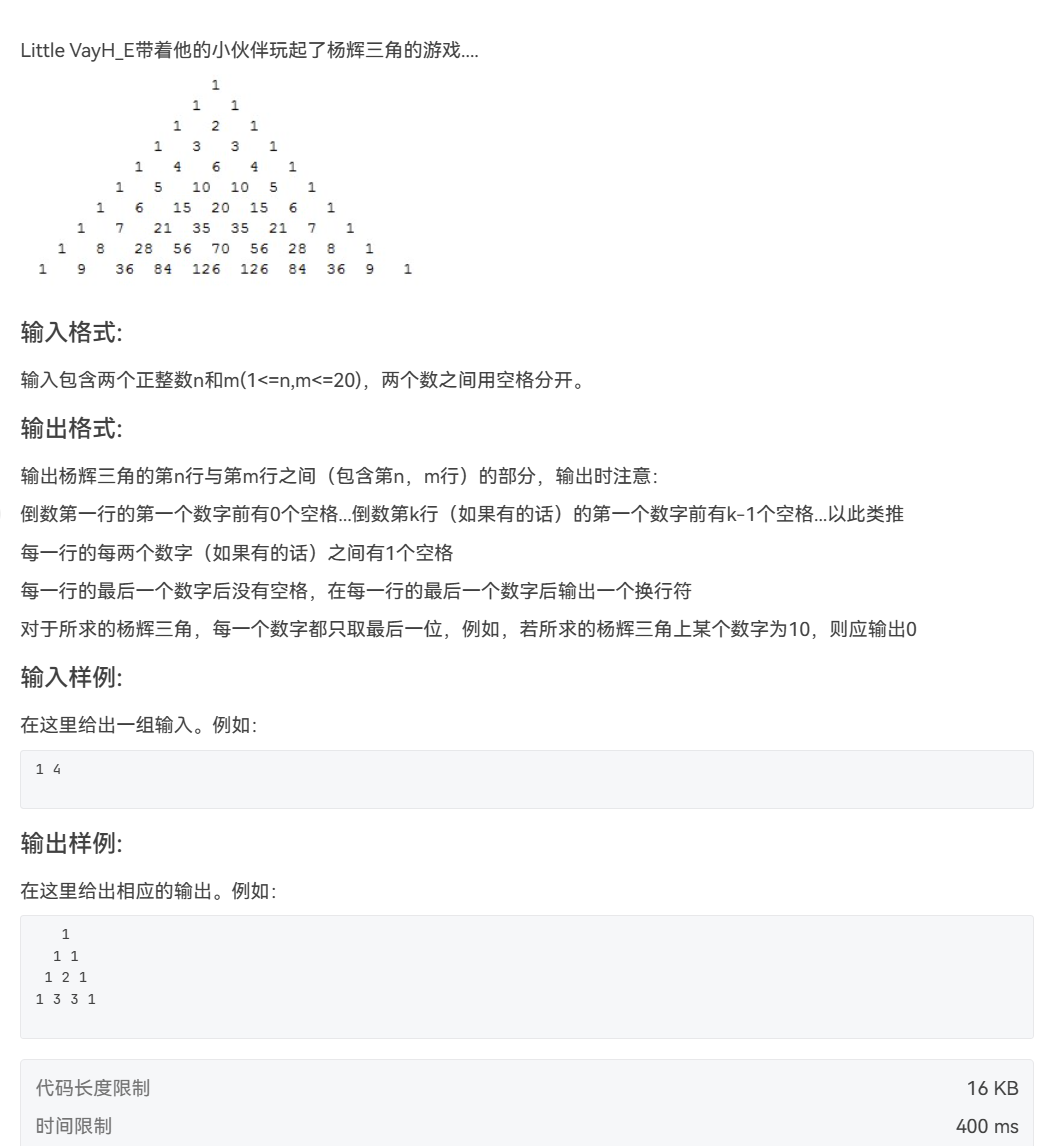
【C/PTA——循环结构3】
C/PTA——循环结构3 7-1 二分法求多项式单根1.题目要求2.代码实现 7-2 循环-十进制转化1.题目要求2.代码实现 7-3 梅森数1.题目要求2.代码实现 7-4 单词长度1.题目要求2.代码实现 7-5 21循环-求和31.题目要求2.代码实现 7-6 21循环-金字塔1.题目要求2.代码实现 7-7 循环-杨辉三…...
MAC设备(M1)环境下编译安装openCV for Java
最近发现一个需求,可以用openCV来实现,碰巧又新买了mac笔记本,就打算利用业余时间安装下openCV。这里将主要步骤记录下,希望能帮助有需要的人。 1、准备编译环境 #查询编译opencv相关依赖 brew info opencv查询结果如下图所示&a…...
pytest中的pytest.ini
[pytest] filterwarnings ignore::DeprecationWarning addopts -v -s markers uat:1 smok:2 log_cli1 xfail_strict True filterwarnings ignore::DeprecationWarning 这个的功能就是 test_login.py::Test_login::test_login_correct_password PASSEDwarnings summary …...

C#通过TCP发送List<string>
using System; using System.IO; using System.Net.Sockets; using System.Text; using System.Collections.Generic;public static void SendList<string>(Stream stream, List<string> list) {// 将List<string>对象转换为字节数组byte[] data Encoding.U…...

Mactracker for mac(硬件信息查询工具)免费下载
想知道你电脑的信息吗?Mactracker Mac版是Macos上一款硬件信息查询工具,可以查询电脑中的硬件信息,还可以查看您使用软件的具体情况,苹果电脑产品和周边产品的信息,售价等等,让您对电脑有更多深刻的了解。 …...

MES管理系统中常规的生产建模有哪些
随着制造业的快速发展,MES生产管理系统已经成为了现代制造业不可或缺的核心系统。MES通过对生产过程进行建模,实现了生产过程的可视化、可控制和可优化,为企业提供了全方位的生产管理解决方案。本文将深化对MES管理系统及其主要生产模型的理解…...

S2-Pro模型推理服务高可用部署:基于Docker与Kubernetes的架构
S2-Pro模型推理服务高可用部署:基于Docker与Kubernetes的架构 1. 为什么需要高可用部署 在实际生产环境中,AI模型推理服务的稳定性直接影响业务连续性。想象一下,当你的电商平台正在举行大促活动,AI推荐系统突然宕机,…...

提升效率:用快马AI一键生成windows18-hd19风格的CSS组件库
提升效率:用快马AI一键生成windows18-hd19风格的CSS组件库 最近在做一个需要windows18-hd19设计风格的项目,这种风格的界面元素特别多,手动编写样式简直让人头大。光是调色板、阴影效果这些基础样式就要折腾半天,更别说那些复杂的…...
)
软考软件评测师备考避坑指南:过来人告诉你这5个章节最容易丢分(附2024最新考纲解析)
软考软件评测师备考避坑指南:5个高频失分章节深度解析 第一次打开软件评测师考纲时,我盯着密密麻麻的知识点列表发愣——这哪是考试大纲,分明是软件工程领域的百科全书。作为经历过三次备考最终以87分通过的老考生,我深刻理解那种…...

基于OpenCASCADE7.4+OSG3.6.3+Qt5.12.7的多文档初级CAD/CAE...
基于opencascade7.4osg3.6.3qt5.12.7的多文档初级Cad/cae平台,支持十几种格式文件,包括step,igs,stl,obj,3ds,osg等,支持视角切换,显示模式切换,仿Cad命令注册机制,装配体显示,模型高…...

ESLint-Plugin-Unicorn规则优先级设置终极指南:如何平衡代码质量和开发效率
ESLint-Plugin-Unicorn规则优先级设置终极指南:如何平衡代码质量和开发效率 【免费下载链接】eslint-plugin-unicorn More than 100 powerful ESLint rules 项目地址: https://gitcode.com/gh_mirrors/es/eslint-plugin-unicorn ESLint-Plugin-Unicorn是一个…...

新手零障碍入门:在免激活的快马平台完成你的第一个Python小游戏
作为一个刚接触编程的新手,我最近在InsCode(快马)平台上完成了人生第一个Python小游戏——猜数字。整个过程比想象中简单得多,特别适合像我这样零基础的小白入门。下面分享我的学习笔记,希望能帮到同样想尝试编程的朋友。 为什么选择猜数字游…...

Nanbeige4.1-3B惊艳效果:同一硬件下对比Phi-3-mini,Nanbeige长文本保持率+35%
Nanbeige4.1-3B惊艳效果:同一硬件下对比Phi-3-mini,Nanbeige长文本保持率35% 最近,一个只有30亿参数的小模型在开发者圈子里悄悄火了起来。它不是那种动辄千亿参数、需要顶级显卡才能跑的“巨无霸”,而是一个在普通硬件上就能流畅…...

Mermaid Live Editor:重新定义图表创作的开源利器
Mermaid Live Editor:重新定义图表创作的开源利器 【免费下载链接】mermaid-live-editor Edit, preview and share mermaid charts/diagrams. New implementation of the live editor. 项目地址: https://gitcode.com/GitHub_Trending/me/mermaid-live-editor …...

ROS实战:UZH-FPV数据集下PL-EVIO与主流VIO算法的性能对比
1. UZH-FPV数据集与无人机视觉里程计的挑战 UZH-FPV数据集是苏黎世联邦理工学院发布的专门针对高速无人机场景的多模态数据集。这个数据集最大的特点在于它完整记录了无人机在高速机动飞行(最高速度超过10m/s)时的多传感器数据,包括双目事件相…...
)
零成本玩转千问大模型!OpenClaw 配置秘籍(附每日500 Token福利)
🚀零成本玩转千问大模型!OpenClaw 配置秘籍(附每日500 Token福利) 这份教程将带你完成从环境准备到成功验证的全过程,让你手中的工具“活”起来。 前期准备:搭建基石 在开始代码操作之前,我们需…...