AD9371 官方例程 NO-OS 主函数 headless 梳理(一)
AD9371 系列快速入口
AD9371+ZCU102 移植到 ZCU106 : AD9371 官方例程构建及单音信号收发
ad9371_tx_jesd -->util_ad9371_xcvr接口映射: AD9371 官方例程之 tx_jesd 与 xcvr接口映射
AD9371 官方例程 时钟间的关系与生成 : AD9371 官方例程HDL详解之JESD204B TX侧时钟生成(一)
JESD204B相关IP端口信号 : AD9371 官方例程HDL JESD204B相关IP端口信号
裸机程序配置 AD9528、AD9371、FPGA IP: AD9371 官方例程裸机SW 和 HDL配置概述(一)
裸机程序配置 AD9528、AD9371、FPGA IP: AD9371 官方例程裸机SW 和 HDL配置概述(二)
裸机程序配置 AD9528、AD9371、FPGA IP: AD9371 官方例程裸机SW 和 HDL配置概述(三)
文章目录
- 前言
- 一、xilinx platform
- 二、AD9528
- 三、CLKGEN IP
- 四、JESD 链路层初始化
- 五、ADXCVR 物理层初始化
- 六、AD9371 初始化步骤
- 6.1 复位
- 6.2 MYKONOS 初始化
- 6.3 检查CLKPLL的锁定状态
- 6.4 执行MCS
- 6.5 初始化ARM处理器、加载ARM二进制文件、读取AD9371 ARM版本
- 6.6 设置RF PLL频率、检查RF PLL锁定状态
- 6.7 设置AD9371 GPIO
- 6.8 设置 RX、Obs 和 SNIFFER 手动增益 和 TX 衰减
- 6.9 运行初始化校准,等待初始化校准完成
- 6.10 (可选,例程未使用)使用PA进行初始化外部LOL校准
前言
官方例程主函数需要配置和初始化 AD9528、AD9371、FPGA IP,打开DDS 或者通过DMA 搬运发送和接收数据
后续见 AD9371 官方例程 NO-OS 主函数 headless 梳理(二)
一、xilinx platform
打开 指令和数据 Cache ,初始化 platform(包含 SPI 和 GPIO)
Xil_ICacheEnable();/* Enable the instruction cache. */Xil_DCacheEnable();ret = platform_init();if (ret != 0) {printf("error: platform_init() failed\n");goto error_0;}
二、AD9528
通过AD9528复位引脚,复位 AD9528
通过 VCXO REFA outFrequency_Hz[1] ,得到 PLL1 PLL2 output 0-13 和 sysref 各个配置参数,存入 clockAD9528_device
通过 SPI 初始化 AD9528 的 PLL1 PLL2 output 和 sysref
error = AD9528_resetDevice(clockAD9528_device);if (error != ADIERR_OK) {printf("AD9528_resetDevice() failed\n");error = ADIERR_FAILED;goto error_1;}error = AD9528_initDeviceDataStruct(clockAD9528_device,clockAD9528_device->pll1Settings->vcxo_Frequency_Hz,clockAD9528_device->pll1Settings->refA_Frequency_Hz,clockAD9528_device->outputSettings->outFrequency_Hz[1]);if (error != ADIERR_OK) {printf("AD9528_initDeviceDataStruct() failed\n");error = ADIERR_FAILED;goto error_1;}/* Initialize the AD9528 by writing all SPI registers */error = AD9528_initialize(clockAD9528_device);if (error != ADIERR_OK)printf("WARNING: AD9528_initialize() issues. Possible cause: REF_CLK not connected.\n");
三、CLKGEN IP
通过axi_clkgen_init 赋值给 rx_clkgen 等
通过参考时钟和需要生成目标时钟,得到配置参数,配置到 IP的MMCM中,利用 MMCM 得到所需时钟,详见第二部分
status = axi_clkgen_init(&rx_clkgen, &rx_clkgen_init);status = axi_clkgen_init(&tx_clkgen, &tx_clkgen_init);status = axi_clkgen_init(&rx_os_clkgen, &rx_os_clkgen_init);status = axi_clkgen_set_rate(rx_clkgen, rx_div40_rate_hz);status = axi_clkgen_set_rate(tx_clkgen, tx_div40_rate_hz);status = axi_clkgen_set_rate(rx_os_clkgen, rx_os_div40_rate_hz);
利用axi_clkgen_calc_params(clkgen, clkgen->parent_rate, rate, &d, &m, &dout); 计算MMCM中的 M、 D、 O
将 dout ,也就是 O0 写入 MMCM_REG_CLKOUT0_1 和 MMCM_REG_CLKOUT0_2 (0x08 和 0x09,OUT0的DRP地址)
axi_clkgen_calc_clk_params(dout, &low, &high, &edge, &nocount);
axi_clkgen_mmcm_write(clkgen, MMCM_REG_CLKOUT0_1, (high << 6) | low, 0xefff);
axi_clkgen_mmcm_write(clkgen, MMCM_REG_CLKOUT0_2, (edge << 7) | (nocount << 6),0x03ff)
得到的 D 和 M 类似 O0,写入相应的寄存器中
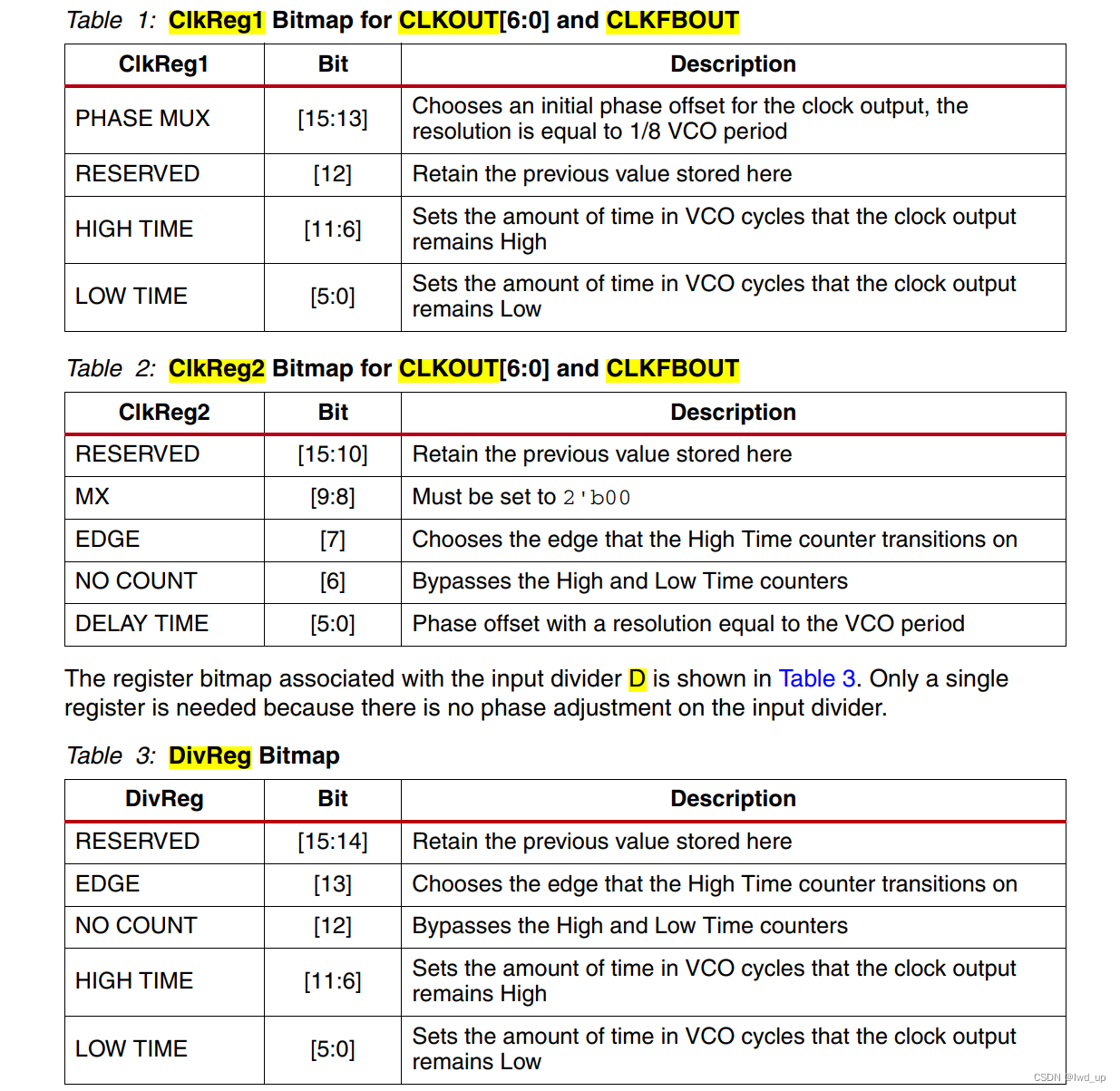
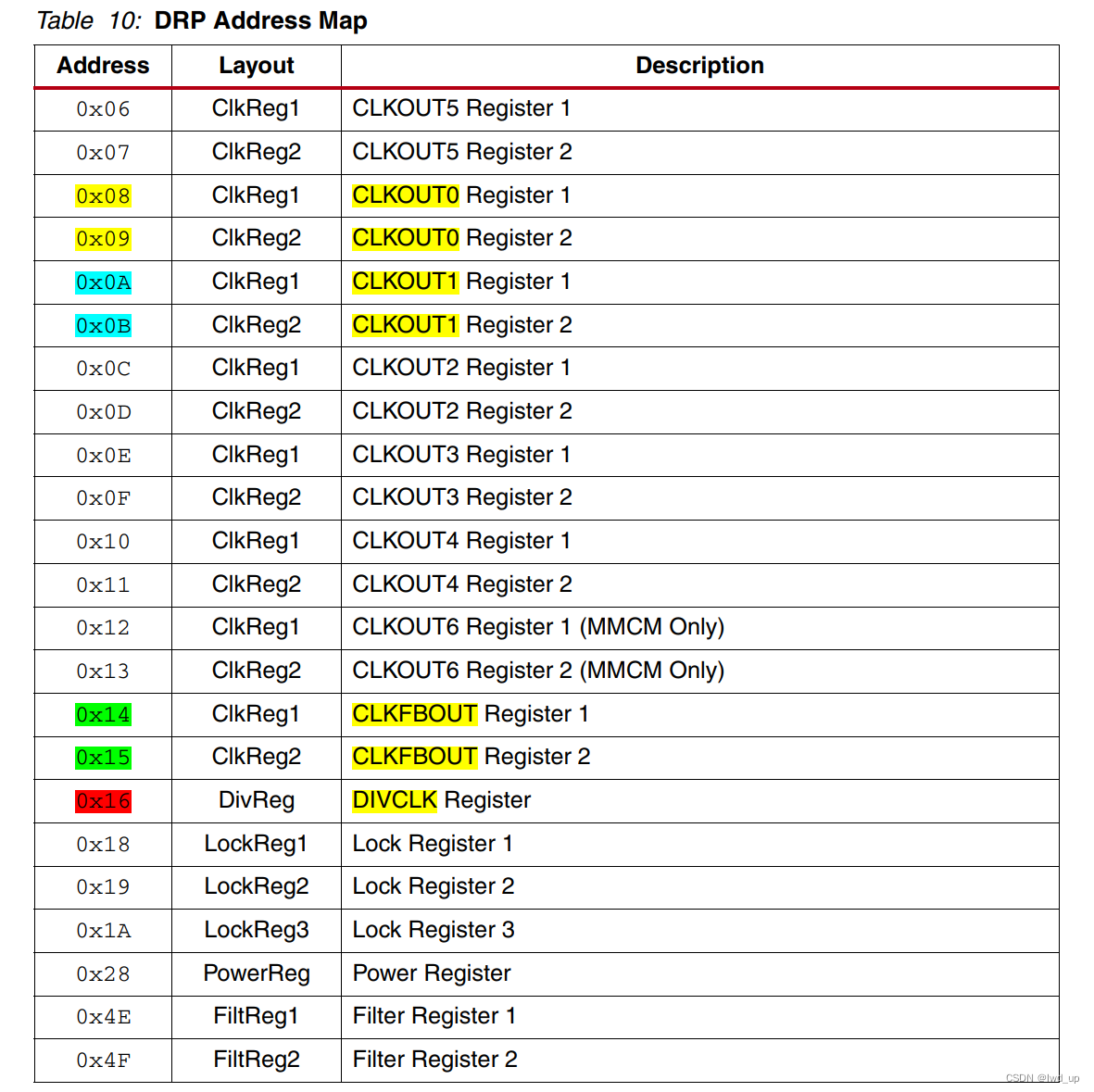
参考 XAPP888
四、JESD 链路层初始化
初始化 tx_jesd 、rx_jesd 等,并把 octets_per_multiframe 和 octets_per_frame 配置给IP核,octets_per_multiframe 除以 4,得到 up_cfg_beats_per_multiframe ,在链路层的LMFC中使用
status = axi_jesd204_rx_init(&rx_jesd, &rx_jesd_init);status = axi_jesd204_tx_init(&tx_jesd, &tx_jesd_init);status = axi_jesd204_rx_init(&rx_os_jesd, &rx_os_jesd_init);
五、ADXCVR 物理层初始化
初始化 tx_adxcvr、rx_adxcvr 等,配置物理层 sys_clk_sel、 out_clk_sel 、LPM_DFE_N 等参数,通过 adxcvr_clk_set_rate(xcvr, xcvr->lane_rate_khz, xcvr->ref_rate_khz) 计算并配置(通过DRP) QPLL 、CPLL、 t/rx_out_div 和 clk25M ,得到正确的 lane rate
status = adxcvr_init(&rx_adxcvr, &rx_adxcvr_init);status = adxcvr_init(&tx_adxcvr, &tx_adxcvr_init);status = adxcvr_init(&rx_os_adxcvr, &rx_os_adxcvr_init);
六、AD9371 初始化步骤
6.1 复位
通过 GPIO 复位 AD9371,为初始化做准备
MYKONOS_resetDevice(&mykDevice))
6.2 MYKONOS 初始化
根据有效的 Rx/Tx/ORx/sniffer profiles,配置AD9371的 deserializer 、 Tx1/Tx2 deframer, serializer, Rx1/Rx2 framer, 和 ORx framer,设置 clock PLL 和 digital clocks(MYKONOS_initDigitalClocks),
MYKONOS_initialize(&mykDevice))
6.3 检查CLKPLL的锁定状态
调用MYKONOS_checkPllLockStatus并使用用户定义的代码执行CLKPLL的锁定检查
MYKONOS_checkPllsLockStatus(&mykDevice,&pllLockStatus)
6.4 执行MCS
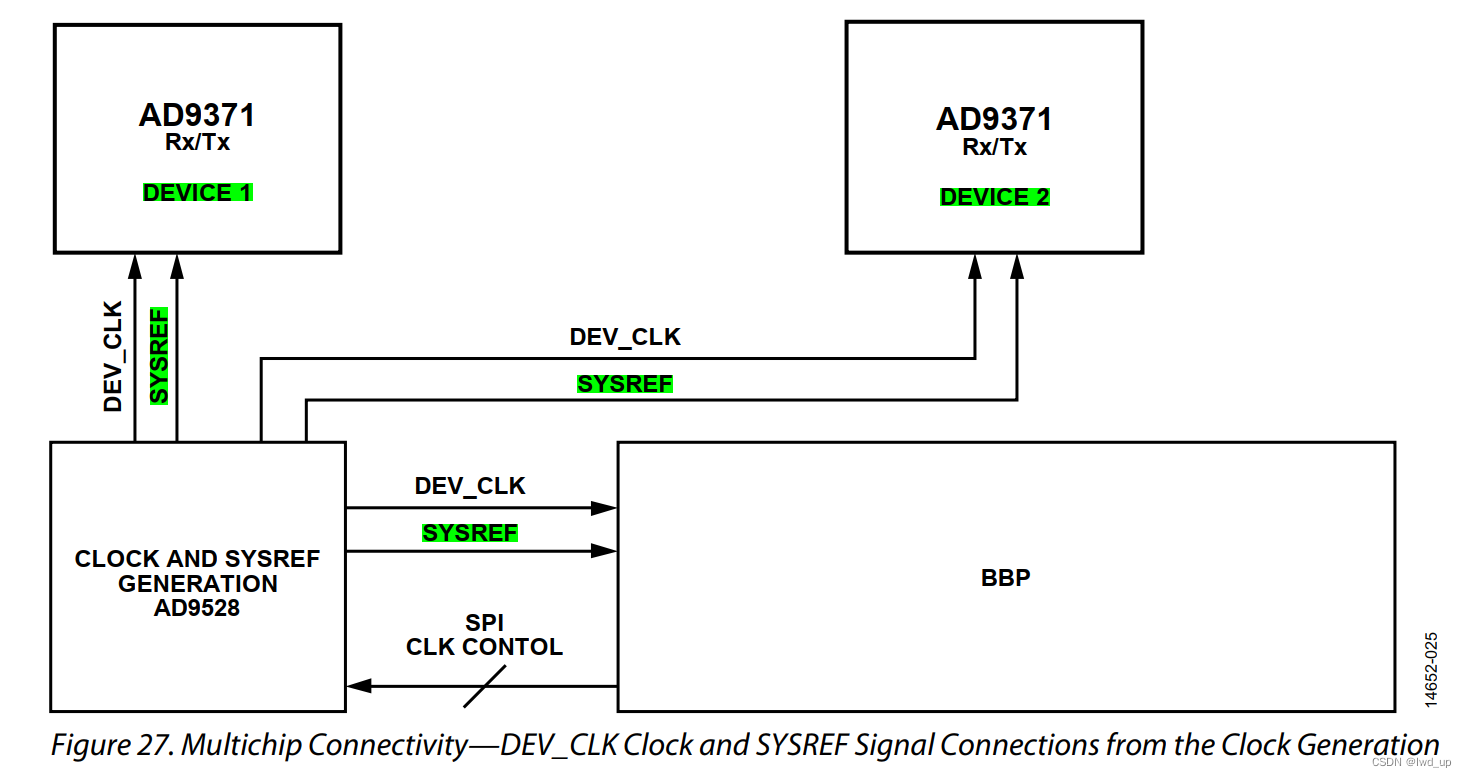
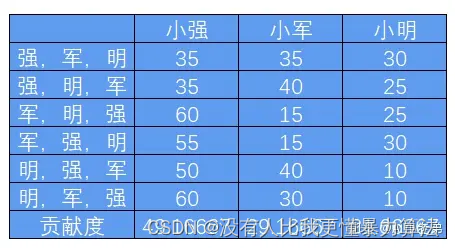
对于需要两个以上输入或两个以上输出的多输入多输出(MIMO)系统,需要多个射频器件和同一个参考振荡器。AD9371提供了接受外部参考时钟并与其他器件同步操作的能力。每个设备都有自己的基带PLL,该PLL根据参考时钟生成采样和数据时钟,因此需要额外的控制机制来同步多个设备。
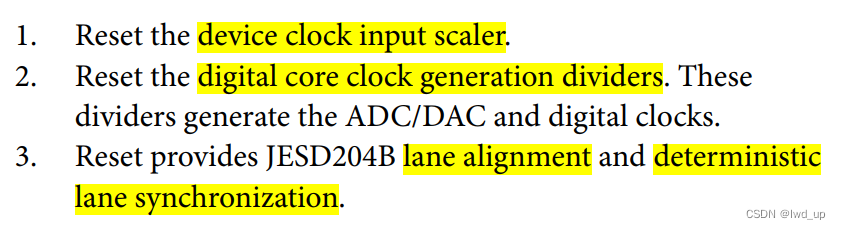
当使用多个收发器或甚至只有一个收发器时(如果只使用单个设备,则仍然需要此步骤来确保JESD204B确定性延迟),需要 Tx 和 Rx(obs)JESD204B数据路径之间确定性延迟,所有JESD204B通道同步在一起以满足确定性延迟要求,在所有收发器初始化后执行MCS。通过芯片路由SYSREF脉冲,来重置时钟合成器、所有数字时钟和JESD204B接口。
JESD204B本地多帧计数器(LMFC)的频率必须是SYSREF脉冲串频率的整数倍。
通过SPI 控制AD9528 发送 SYSREF 脉冲,发送SYSREF脉冲后,再次调用MYKONOS_enableMultichipSync 函数,将enableMcs参数设置为0,读取MCS状态
1 使用Mykonos_Initialize 初始化系统中的所有Mykonos
2 使用enableMcs=1 ,运行 MYKONOS_enableMultichipSync
3 发送至少3个SYSREF脉冲
4 使用enableMcs=0,运行 MYKONOS_enableMultichipSync
5 加载ARM
设备只对前三个SYSREF脉冲进行同步,三个脉冲后,所有AD9371设备同时同步到SYSREF脉冲。可以提供三个以上的脉冲,但是它们对同步没有任何影响(额外的脉冲被传递到JESD204B接口)。要重新同步,必须用硬复位复位设备。
MYKONOS_enableMultichipSync(&mykDevice, 1,&mcsStatus)AD9528_requestSysref(clockAD9528_device, 1);AD9528_requestSysref(clockAD9528_device, 1);AD9528_requestSysref(clockAD9528_device, 1);MYKONOS_enableMultichipSync(&mykDevice, 0,&mcsStatus)
前两个脉冲使数字电路同步,第三个和随后的SYSREF脉冲被传递到JESD204B接口。
通过 MYKONOS_enableSysrefToRxFramer 和 MYKONOS_enableSysrefToDeframer 等函数 使能 AD9371 JESD204B IP 接受SYSREF信号,用于内部本地多帧计数器(LMFC)定时复位,使能后,发送第三个SYSREF脉冲到 AD9371 和 FPGA,复位每个设备的本地 JESD204B LMFC,以保证确定性延迟。
AD9371 不会对未来的SYSREF脉冲复位LMFC,除非在 framer/deframer 数据结构中启用了newSysrefOnRelink
uint8_t newSysrefOnRelink; /*!< Flag for determining if SYSREF on relink should be set. Where, if > 0 = set, 0 = not set */
} mykonosJesd204bFramerConfig_t;
多芯片同步(MCS)功能不包括RF同步,使用此功能在多个芯片之间唯一可能的对齐是digital timing alignment
6.5 初始化ARM处理器、加载ARM二进制文件、读取AD9371 ARM版本
MYKONOS_initArm(&mykDevice)MYKONOS_loadArmFromBinary(&mykDevice,&firmware_Mykonos_M3_bin[0], firmware_Mykonos_M3_bin_len)MYKONOS_getArmVersion(&mykDevice, &arm_major, &arm_minor, &arm_release, NULL)
6.6 设置RF PLL频率、检查RF PLL锁定状态
对使用的每个通道设置RF频率
MYKONOS_setRfPllFrequency(&mykDevice, RX_PLL,mykDevice.rx->rxPllLoFrequency_Hz)) MYKONOS_setRfPllFrequency(&mykDevice, TX_PLL,mykDevice.tx->txPllLoFrequency_Hz))MYKONOS_setRfPllFrequency(&mykDevice, SNIFFER_PLL,mykDevice.obsRx->snifferPllLoFrequency_Hz))MYKONOS_checkPllsLockStatus(&mykDevice,&pllLockStatus)
6.7 设置AD9371 GPIO
根据所需的配置设置GPIO
mykGpioErr = MYKONOS_setRx1GainCtrlPin(&mykDevice, 0, 0, 0, 0, 0)mykGpioErr = MYKONOS_setRx2GainCtrlPin(&mykDevice, 0, 0, 0, 0, 0)mykGpioErr = MYKONOS_setTx1AttenCtrlPin(&mykDevice, 0, 0, 0, 0, 0)mykGpioErr = MYKONOS_setTx2AttenCtrlPin(&mykDevice, 0, 0, 0, 0)mykGpioErr = MYKONOS_setupGpio(&mykDevice))
6.8 设置 RX、Obs 和 SNIFFER 手动增益 和 TX 衰减
MYKONOS_setRx1ManualGain(&mykDevice, 255)MYKONOS_setObsRxManualGain(&mykDevice, OBS_RX1_TXLO, 255)MYKONOS_setObsRxManualGain(&mykDevice, OBS_SNIFFER_A, 255)MYKONOS_setTx1Attenuation(&mykDevice, 10000);MYKONOS_setTx2Attenuation(&mykDevice, 10000);
6.9 运行初始化校准,等待初始化校准完成
uint32_t initCalMask = TX_BB_FILTER | ADC_TUNER | TIA_3DB_CORNER | DC_OFFSET |TX_ATTENUATION_DELAY | RX_GAIN_DELAY | FLASH_CAL |PATH_DELAY | TX_LO_LEAKAGE_INTERNAL | TX_QEC_INIT |LOOPBACK_RX_LO_DELAY | LOOPBACK_RX_RX_QEC_INIT |RX_LO_DELAY | RX_QEC_INIT ;* calMask Bit | Calibration* ------------|----------------------* 0 | Tx BB Filter* 1 | ADC Tuner* 2 | TIA 3dB Corner* 3 | DC Offset* 4 | Tx Attenuation Delay* 5 | Rx Gain Delay* 6 | Flash Cal* 7 | Path Delay* 8 | Tx LO Leakage Internal* 9 | Tx LO Leakage External* 10 | Tx QEC Init* 11 | LoopBack Rx LO Delay* 12 | LoopBack Rx Rx QEC Init* 13 | Rx LO Delay* 14 | Rx QEC Init* 15 | DPD Init* 16 | Tx CLGC (Closed Loop Gain Control)* 17 | Tx VSWR InitMYKONOS_runInitCals(&mykDevice,(initCalMask & ~TX_LO_LEAKAGE_EXTERNAL)MYKONOS_waitInitCals(&mykDevice, 60000, &errorFlag,&errorCode))
6.10 (可选,例程未使用)使用PA进行初始化外部LOL校准
确保此时PA已启用
MYKONOS_runInitCals(&mykDevice,TX_LO_LEAKAGE_EXTERNAL)MYKONOS_waitInitCals(&mykDevice, 60000, &errorFlag, &errorCode)
未完,见 AD9371 官方例程 NO-OS 主函数 headless 梳理(二)
相关文章:
AD9371 官方例程 NO-OS 主函数 headless 梳理(一)
AD9371 系列快速入口 AD9371ZCU102 移植到 ZCU106 : AD9371 官方例程构建及单音信号收发 ad9371_tx_jesd -->util_ad9371_xcvr接口映射: AD9371 官方例程之 tx_jesd 与 xcvr接口映射 AD9371 官方例程 时钟间的关系与生成 : AD9371 官方…...
SHAP 和 LIME 解释模型
内容大纲 1、SHAP 解释器1.1 案例:用于预测患者肺癌1.2 案例中使用的shap解释器1.3 SHAP工作原理1.4 举例说明 2、LIME 解释器2.1 案例:判断法律案件胜诉可能性2.2 LIME解释器工作原理2.3 本地解释模型的训练过程2.4 举例说明1:新闻分类2.4 举…...

若依vue-初步下载使用
若依框架可以满足大部分的后台管理系统的开发,使用频率也是比较高的,所以这里讲一下如何使用若依框架 若依框架代码克隆 首先去若依官网 http://www.ruoyi.vip/ 这里演示的是若依-vue版本的使用 我们点击下载 会跳转到码云仓库 或者直接点击下面的链接去码云仓库 https://git…...

Android 使用.9图 NinePatchDrawable实现动态聊天气泡
最近一段时间,在做一个需求,需要实现一个聊天气泡的动画效果,如下图所示: GitHub源码demo ,建议下载demo,运行查看。 动态聊天气泡动画 静态聊天气泡 经过一段时间调研,实现方案如下: 实现方…...

力扣 LCR 024. 反转链表两种解法
目录 1.解题思路Ⅰ2.代码实现Ⅰ3.解题思路Ⅱ4.代码实现Ⅱ 1.解题思路Ⅰ 利用头插法,遍历数组将后面的元素头插到前面的元素. 2.代码实现Ⅰ struct ListNode* reverseList(struct ListNode* head) { struct ListNode*curhead;;struct ListNode*newheadNULL;whil…...
掌握Capture One 23 Pro,打造专业级图片编辑体验!
作为一位摄影师,您是否曾经为自己的照片无法达到预期效果而烦恼?或者您是否在寻找一种能够让您轻松处理和编辑照片的工具?如果是,那么您一定不能错过Capture One 23 Pro这款图片编辑软件! Capture One 23 Pro的特点 …...
MFC-TCP网络编程服务端-Socket
目录 1、通过Socket建立服务端: 2、UI设计: 3、代码的实现: (1)、CListenSocket类 (2)、CConnectSocket类 (3)、CTcpServerDlg类 1、通过Socket建立服务端ÿ…...

ChatGPT辅助下的小组学习
1 网上分享会-主题 1.9曾子曰:“慎终追远,民德归厚矣。” Master Zeng said:“Be circumspect in funerary services and continue sacrifices to the distant ancestors, and the virtue (de 德) of the common people will thrive.” 2 过程记录 听…...

Linux相关命令
切换root用户:sudo su 串口功能测试:cutecom 某某驱动查询:nvidia-smi #xxx-smi查询某某驱动 在线安装某某程序:apt install xxx 设置文件权限chmod 常用:chmod 777 sudo chmod 600 (只有所有者…...
详解卷积神经网络结构
前言 卷积神经网络是以卷积层为主的深度网路结构,网络结构包括有卷积层、激活层、BN层、池化层、FC层、损失层等。卷积操作是对图像和滤波矩阵做内积(元素相乘再求和)的操作。 1. 卷积层 常见的卷积操作如下: 卷积操作解释图解…...

java读取pdf数据
目录 读取方式有两种: 方式一: 方式一所需要的maven依赖如下: 方式一读取的Java代码如下:<...

arcmap / arcgis 安装教程
ArcGIS 10.8 for Desktop 完整安装教程(含win7/8/10 32/64位下载地址亲测可用汉化) | 麻辣GIS (malagis.com) 关于GIS语言汉化包(中文)安装失败的解决办法_arcgis中文语言包_miumiuniya的博客-CSDN博客 检查安装路径:…...

CMake中的变量: 改变构建行为的变量
文章目录 变量名称描述BUILD_SHARED_LIBS全局标志,用于在启用时使add_library()创建共享库。 如果存在并且为true,则这将导致所有库被构建为共享库,除非该库被明确添加为静态库。这个变量通常作为option()添加到项目中,这样项目的…...
台式电脑怎么无损备份迁移系统到新硬盘(使用傲梅,免费的就可以)
文章目录 前言一、想要将源硬盘上的系统原封不动地迁移到新硬盘上二、准备工作2.具体步骤 总结 前言 半路接手公司一台台式电脑,C盘(120g)爆红,仅剩几个G,优化了几次,无果后。准备换一个大一点的增到500g。…...

【紫光同创国产FPGA教程】【PGC1/2KG第七章】7.数字钟实验例程
本原创教程由深圳市小眼睛科技有限公司创作,版权归本公司所有,如需转载,需授权并注明出处 适用于板卡型号: 紫光同创PGC1/2KG开发平台(盘古1K/2K) 一:盘古1K/2K开发板(紫光同创PGC…...

【星海随笔】git的使用
1.在终端,检查git是否安装 git --version 2.没有安装的话去,官网,下载git 3.一直点下一步即可 4.安装后在终端检查git是否安装好 5.设置用户名和邮件地址(最好和GitHub的用户名/邮箱保持一致) git config --global user.name “自己的用户名”…...
)
安卓常见设计模式------装饰器模式(Kotlin版)
1. W1 是什么,什么是装饰器模式? 思想:动态地给对象添加额外的功能,通过将对象包装在一个装饰器类中,使装饰器类在不改变原始对象结构的情况下,扩展其功能。 2. W2 为什么,为什么需要使用装饰…...
将网站上的点击作为转化操作进行跟踪-官方指导文档
您可以使用转化跟踪功能,在用户点击您网站上的某个按钮或链接时进行跟踪。例如,您可以在用户点击“立即购买”按钮或点击您移动网站上的电话号码时进行跟踪。 本文介绍如何添加和修改转化跟踪代码,以便跟踪客户在您网站上的点击操作。如果希…...

Go相关命令说明
目录 Go相关命令说明go mod tidy :清理未使用依赖项,并更新模块文件主要功能好处 go clean -modcache :清除模块缓存go clean -testcache :清除测试缓存go test -v ./client :测试当前目录下client目录中的所有测试函数…...

3D全景技术,为我们打开全新宣传领域
随着科技的发展,3D全景技术正在融入我们的生活,这种全新视觉体验方式为我们打开了一扇全新的宣传领域,可以让我们多方位、多视角地探索各个行业,无论是对教育、商业、还是其他领域,都产生了深远的影响。 3D全景技术结合…...

告别枯燥协议文档:用Python模拟SECS-II消息收发,5分钟理解数据项与列表
用Python实战解析SECS-II协议:5分钟掌握数据项与列表的编码艺术 在半导体设备通信领域,SECS-II协议就像设备与主机之间的"普通话",但它的官方文档读起来却像一本晦涩的密码手册。当我第一次翻开SEMI标准文档时,那些抽象…...

2026年怎么部署OpenClaw/Hermes Agent?经验总结
2026年怎么部署OpenClaw/Hermes Agent?经验总结。OpenClaw和Hermes Agent是什么?OpenClaw和Hermes Agent怎么部署?如何部署OpenClaw/Hermes Agent?2026年还在为部署OpenClaw和Hermes Agent到处找教程踩坑吗?别再瞎折腾…...

MAYA-W463-00B,融合双频Wi-Fi 6与蓝牙5.4 LE的无线模块
简介今天我要向大家介绍的是 u-blox 的无线模块——MAYA-W463-00B。它不仅支持 MU-MIMO 技术,还具备 Station(站点)、Access Point(接入点)以及 Wi-Fi Direct 等多种灵活的工作模式。与此同时,它还集成了符…...

Real Anime Z高清作品分享:1024×1024分辨率下皮肤质感与光影表现力
Real Anime Z高清作品分享:10241024分辨率下皮肤质感与光影表现力 1. 真实系二次元生成工具介绍 Real Anime Z是一款基于阿里云通义Z-Image底座模型开发的高精度二次元图像生成工具。通过Real Anime Z专属微调权重,这款工具专门针对真实系二次元风格进…...

ANIMATEDIFF PRO企业落地实践:中小工作室AI视频内容生产提效方案
ANIMATEDIFF PRO企业落地实践:中小工作室AI视频内容生产提效方案 1. 项目概述:电影级AI视频渲染工作站 ANIMATEDIFF PRO是一款专为中小型创意工作室打造的高性能AI视频生成平台。基于先进的AnimateDiff架构和Realistic Vision V5.1模型构建,…...

终极JavaScript面试准备指南:掌握10个实战练习轻松应对面试挑战
终极JavaScript面试准备指南:掌握10个实战练习轻松应对面试挑战 【免费下载链接】javascript-interview-questions List of 1000 JavaScript Interview Questions 项目地址: https://gitcode.com/GitHub_Trending/ja/javascript-interview-questions 正在准备…...
车辆移动建模与功率调节)
手把手教你学Simulink——基于Simulink的动态无线充电(DWPT)车辆移动建模与功率调节
目录 手把手教你学Simulink ——基于Simulink的动态无线充电(DWPT)车辆移动建模与功率调节 一、引言:让电动汽车“边跑边充” 二、DWPT系统架构与关键问题 1. 系统组成 2. 核心挑战分析 三、车辆移动建模(Simulink实现&…...
)
Agent Hooks 实战入门:手把手配置你的第一个 Hook(二)
前言 在上一篇文章《深入理解 Agent Hooks:Claude Code 自动化扩展机制详解(一)》中,我们系统介绍了 Hooks 的核心概念、五种类型以及生命周期事件。相信你已经对 Hooks 有了初步的理论认识。 本文目标很简单:带你亲…...

G5080,TS3380,G2810,MG3680,G3810,TS3440,IX6780,MP288,TS8380报错5B00,P07,E08,1700,5b04废墨垫清零,亲测有效
下载:点这里下载 备用下载:https://pan.baidu.com/s/1WrPFvdV8sq-qI3_NgO2EvA?pwd0000 常见型号如下: G系列 G1000、G1100、G1200、G1400、G1500、G1800、G1900、G1010、G1110、G1120、G1410、G1420、G1411、G1510、G1520、G1810、G1820、…...

全能投票制作平台-礼物投票-音频视频图片-多开账号盈利
温馨提示:文末有资源获取方式最近在折腾微信生态相关的工具,发现一个现象:无论是教育培训机构的才艺展示,还是商家的品牌活动,甚至是朋友家孩子的比赛拉票,投票功能始终是刚需。而这个细分领域里࿰…...