基于袋獾算法的无人机航迹规划-附代码
基于袋獾算法的无人机航迹规划
文章目录
- 基于袋獾算法的无人机航迹规划
- 1.袋獾搜索算法
- 2.无人机飞行环境建模
- 3.无人机航迹规划建模
- 4.实验结果
- 4.1地图创建
- 4.2 航迹规划
- 5.参考文献
- 6.Matlab代码
摘要:本文主要介绍利用袋獾算法来优化无人机航迹规划。
1.袋獾搜索算法
袋獾算法原理请参考:https://blog.csdn.net/u011835903/article/details/130543093
2.无人机飞行环境建模
? 环境模型的建立是考验无人机是否可以圆满完成人类所赋予各项任务的基
础和前提,其中第一步便是如何描述规划空间中的障碍物。首先我们将采取函数模拟法模拟地貌特征。其函数表达式为:
z ( x , y ) = s i n ( y + a ) + b s i n ( x ) + c c o s ( d y 2 + x 2 ) + e c o s ( y ) + f s i n ( f y 2 + x 2 ) + g c o s ( y ) (1) z(x,y)=sin(y+a)+bsin(x)+ccos(d\sqrt{y^2+x^2})+ecos(y)+fsin(f\sqrt{y^2+x^2})+gcos(y)\tag{1} z(x,y)=sin(y+a)+bsin(x)+ccos(dy2+x2)+ecos(y)+fsin(fy2+x2)+gcos(y)(1)
其中, ( x , y ) (x, y) (x,y) 为地形上某点投影在水平面上的点坐标, z z z 则为对应点坐标的高度。式中 a , b , c , d , e , f , g a, b, c, d, e, f , g a,b,c,d,e,f,g 是常系数,想要得到不同的地貌特征可以通过改变其常系数的大小,以上建模是作为环境模型的基准地形信息。但为了得到障碍区域我们还需要在这个基准地形上叠加山峰模型,这样就可以模拟像山峰、丘陵等障碍地理信息。山峰模型的数学表达式为:
h ( x , y ) = ∑ i h i e x p [ − ( x − x o i ) 2 a i 2 − ( y − y o i ) 2 b i 2 ] + h o (2) h(x,y)=\sum_ih_iexp[-\frac{(x-x_{oi})^2}{a_i^2}-\frac{(y-y_{oi})^2}{b_i^2}]+h_o \tag{2} h(x,y)=i∑hiexp[−ai2(x−xoi)2−bi2(y−yoi)2]+ho(2)
式 (2)中, h o h_o ho 和 h i h_i hi 分别表示基准地形和第 i i i座山峰的高度, ( x o i , y o i ) (xoi , y oi ) (xoi,yoi)则表示第 i座山峰的中心坐标位置,a i 和 b i 分别是第 i 座山峰沿 x 轴和 y 轴方向的坡度。由式(1)和(2),我们可以得到如下表达式:
Z ( x , y ) = m a x [ z ( x , y ) , h ( x , y ) ] (3) Z(x,y)=max[z(x,y),h(x,y)]\tag{3} Z(x,y)=max[z(x,y),h(x,y)](3)
无人机在躲避障碍物的同时也会经常遇到具有威胁飞行安全的区域,我们称之为威胁区域。这些威胁区域可以是敌人的雷达和防空导弹系统的探测威胁区域也可以是一些其它的威胁,一旦无人机进入这些区域很有可能会被击落或者坠毁。为了简化模型,本文采用半径为 r 的圆柱形区域表示威胁区域,其半径的大小决定威胁区域的覆盖范围。每一个圆柱体的中心位置是对无人机构成最大威胁的地方并向外依次减弱。
3.无人机航迹规划建模
? 在环境建模的基础上,无人机航迹规划需要考虑到在执行复杂任务的过程中自身性能约束要求,合理的设计航迹评价函数才能使得袋獾搜索算法得出的最后结果符合要求,并保证规划出的航迹是有效的。考虑到实际环境中,无人机需要不断适应变化的环境。所以在无人机路径规划过程中,最优路径会显得比较复杂,并包含许多不同的特征。基于实际的情况,本文采用较为复杂的航迹评价函数进行无人机路径规划。影响无人机性能的指标主要包括航迹长度、飞行高度、最小步长、转角代价、最大爬升角等。
? 搜索最佳路径通常与搜索最短路径是密不可分的。在无人机航迹规划过程中,航迹的长度对于大多数航迹规划任务来说也是非常重要的。众所周知,较短的路线可以节省更多的燃料和更多的时间并且发现未知威胁的几率会更低。我们一般把路径定义为无人机从起始点到终点所飞行路程的值,设一条完整的航线有 n n n个节点,其中第 i i i个航路点和第 i + 1 i+1 i+1个航路点之间的距离表示为 l i l_i li ,这两个航路点的坐标分别表示为 ( x i , y i , z i ) (x_i,y_i,z_i ) (xi,yi,zi), ( x i + 1 , y i + 1 , z i + 1 ) (x_{i+1}, y_{i+1},z_{i+1}) (xi+1,yi+1,zi+1)并分别记作 g ( i ) g(i) g(i)和 g ( i + 1 ) g(i+1) g(i+1)。航迹需要满足如下条件:
{ l i = ∣ ∣ g ( i + 1 ) − g ( i ) ∣ ∣ 2 L p a t h = ∑ i = 1 n − 1 l i (4) \begin{cases} l_i = ||g(i+1)-g(i)||_2\\ L_{path}=\sum_{i=1}^{n-1}l_i \end{cases}\tag{4} {li=∣∣g(i+1)−g(i)∣∣2Lpath=∑i=1n−1li(4)
在飞行的过程中会遇到障碍物或者进入威胁区域,如果无人机无法躲避障碍物或者飞入了威胁区域将面临被击落或坠毁的危险以至于无法到达终点,记为 L p a t h = ∞ L_{path}=\infty Lpath=∞,但是无穷函数在实际问题中很难表示,我们采用惩罚的方式进行处理。一般情况下,为了利用地形覆盖自身位置,无人机应尽可能降低高度这可以帮助自身避免一些未知雷达等威胁。但是太低的飞行高度同样会加大无人机同山体和地面的撞击几率,因此设定稳定的飞行高度是非常重要的。飞行高度不应该有太大的变化,稳定的飞行高度可以减少控制系统的负担,节省更多的燃料 。为了使无人机飞行更加安全,给出的飞行高度模型:
{ h h e i g h t = 1 n ∑ i = 0 n − 1 ( z ( i ) − z ‾ ) 2 z ‾ = 1 n ∑ i = 0 n − 1 z ( i ) (5) \begin{cases} h_{height}=\sqrt{\frac{1}{n}\sum_{i=0}^{n-1}(z(i)-\overline{z})^2}\\ \overline{z}=\frac{1}{n}\sum_{i=0}^{n-1}z(i) \end{cases}\tag{5} {hheight=n1∑i=0n−1(z(i)−z)2z=n1∑i=0n−1z(i)(5)
无人机的可操作性也受到其转角代价函数的限制。,在飞行过程中无人机的转角应不大于其预先设定的最大转角,转角的大小会影响其飞行的稳定性。本文的研究中,设定最大转角为 Φ Φ Φ,当前转角为 θ \theta θ并且 a i a_i ai是第 i i i段航路段向量。
{ c o s θ = a i T a i + 1 ∣ a i ∣ ∣ a i + 1 ∣ J t u r n = ∑ i = 1 n ( c o s ( Φ − c o s θ ) ) (6) \begin{cases} cos\theta =\frac{a_i^Ta_{i+1}}{|a_i||a_{i+1}|}\\ J_{turn}=\sum_{i=1}^n(cos(\Phi-cos\theta)) \end{cases}\tag{6} {cosθ=∣ai∣∣ai+1∣aiTai+1Jturn=∑i=1n(cos(Φ−cosθ))(6)
其中, ∣ a ∣ |a| ∣a∣代表矢量 a a a的长度。
? 通过对以上三个方面建立了无人机航迹规划的代价函数,可以得出本文的航迹评价函数如下:
J c o s t = w 1 L p a t h + w 2 h h e i g h t + w 3 J t u r n (7) J_{cost}=w_1L_{path}+w_2h_{height}+w_3J_{turn} \tag{7} Jcost=w1Lpath+w2hheight+w3Jturn(7)
其中, J c o s t J_{cost} Jcost是总的代价函数,参数 w i w_i wi , i = 1 , 2 , 3 i=1,2,3 i=1,2,3 表示每个代价函数的权值,且满足如下条件:
{ w i ≥ 0 ∑ i = 1 3 w i = 1 (8) \begin{cases} w_i\geq0 \\ \sum_{i=1}^3 w_i=1 \end{cases} \tag{8} {wi≥0∑i=13wi=1(8)
通过对总的代价函数进行有效地处理,我们可以得到由线段组成的航迹。不可否认的是得到的路径往往是仅在理论上可行,但为了实际可飞,有必要对航迹进行平滑处理。本文采用三次样条插值的方法对路径进行平滑。
4.实验结果
4.1地图创建
设置地图参数a, b, c, d, e, f , g=1。地图大小为:200*200。设置三个山峰,山峰信息如表1所示。威胁区域信息如表2所示
| 信息 | 山峰中心坐标 | 山峰高度 | 山峰X方向坡度 | 山峰y方向坡度 |
|---|---|---|---|---|
| 山峰1 | [60,60] | 50 | 20 | 20 |
| 山峰2 | [100,100] | 60 | 30 | 30 |
| 山峰3 | [150,150] | 80 | 20 | 20 |
| 信息 | 威胁区域中心坐标 | 威胁区域半径 |
|---|---|---|
| 威胁区域1 | [150,50] | 30 |
| 威胁区域2 | [50,150] | 20 |
创建的地图如下:

4.2 航迹规划
设置起点坐标为[0,0,20],终点坐标为[200,200,20]。利用袋獾算法对航迹评价函数式(7)进行优化。优化结果如下:


从结果来看,袋獾算法规划出了一条比较好的路径,表明算法具有一定的优势。
5.参考文献
[1]薛建凯. 一种新型的群智能优化技术的研究与应用[D].东华大学,2020.DOI:10.27012/d.cnki.gdhuu.2020.000178.
6.Matlab代码
相关文章:
基于袋獾算法的无人机航迹规划-附代码
基于袋獾算法的无人机航迹规划 文章目录 基于袋獾算法的无人机航迹规划1.袋獾搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用袋獾算法来优化无人机航迹规划。 1.袋獾搜索算法 …...

2024上海智博会,上海国际智慧城市,物联网,大数据展会(世亚智博会)
中国国际智慧城市,物联网,大数据博览会(简称:世亚智博会)自2010年创办以来,至今已成功举办十多届。世亚智博会是中国较高、规模较大、影响力较广的展会;是被国际业界公认的不可错过的名展之一。随着世亚智博会的国际地位和影响不断…...

家庭教育质量提升成未来教育关注重点
随着教育改革的不断深化,家校合作模式也在实践中不断探索和丰富。 11 月 6 日,第六届长三角家校合作论坛于上海杨浦盛大开幕,此次论坛围绕“家校协同与人的学校领导”这一主题展开深度研讨。论坛旨在交流和分享相关经验及做法,以…...

python入门系列(1)—— 环境安装
前言 社区里面有好多同学想要入门python,可能源于以下原因: 易学性:Python 的语法简洁、清晰,容易理解和上手,使得初学者能够轻松入门编程。无论是编写基本的脚本还是进行更复杂的开发,Python 都提供了友…...

react组件通信
目录 前言: 父子组件通信 子父组件通信 兄弟组件通信 总结 前言: React是一种流行的JavaScript库,用于构建现代化的、高性能的Web应用程序。在React中,组件是代码的构建块。组件通信是React中一个非常重要的概念,…...
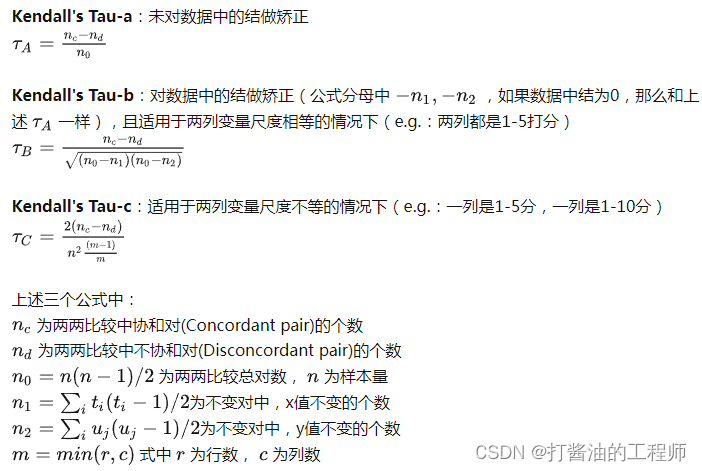
学习笔记|Pearson皮尔逊相关系数|Spearman斯皮尔曼相关系数|和Kendall肯德尔tau-b相关系数|分析流程|-SPSS中双变量相关性分析系数
目录 学习目的软件版本原始文档基础概念皮尔逊相关系数基本假设(适用条件):系数的范围及意义实例1. 读数据:2.正态性检验:3.异常值检验(体重):4.分析: 斯皮尔曼相关系数基…...

计算机服务器中了locked勒索病毒怎么办,勒索病毒解密,数据恢复
随着网络技术的不断成熟,网络中存在的病毒威胁也不断增多,近期,云天数据恢复中心陆续接到很多企业的求助,企业的计算机服务器数据库遭到了勒索病毒攻击,并且勒索病毒的攻击与加密形式也发生了许多变化。其中攻击次数较…...

本地生活餐饮视频怎么拍摄能有更多流量?如何批量生产呢?
本地生活近几年特别的火,所以到现在各类内容雷同性也比较高,视频缺少新的创意和玩法,像餐饮店的视频,大部分都是拍顾客进门、拍餐饮店座无虚席的实景……作为用户,其实早就已经看腻了。 今天推荐本地生活餐饮店商家拍…...
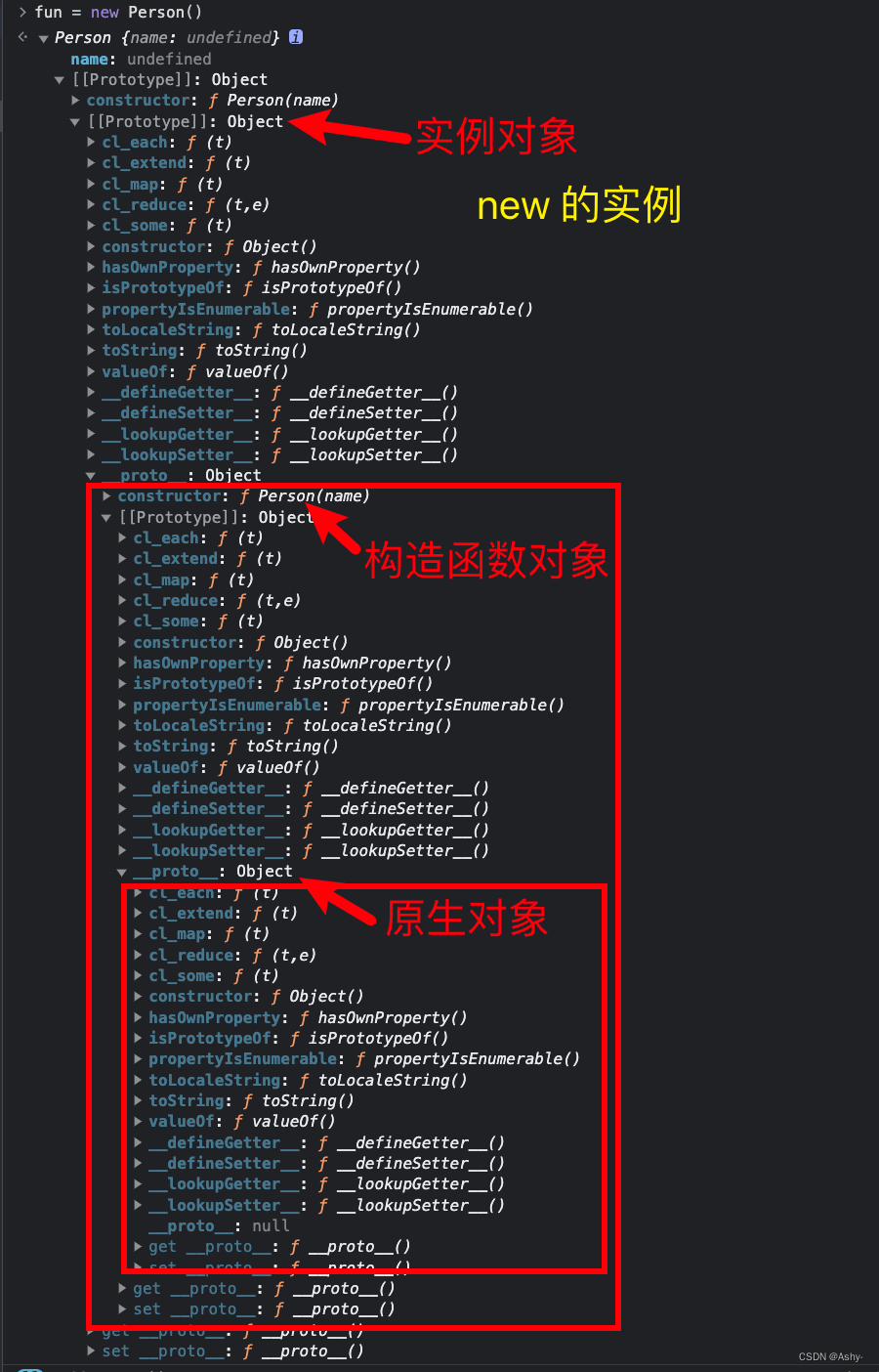
【笔记】原型和原型链(持续完善)
概念 原型:函数都具有 prototype 属性,称之为原型,也称之为原型对象 1.1 原型可以放一些属性和方法,共享给实例对象使用(也就是原生方法)。 1.2 原型可以做继承原型链:对象都有 __proto__ 属性…...

python向word中添加表格
1、表格插入 方法一:直接创建表添加 #导入库 from docx import Document #创建文档对象 document Document()#创建5行7列表格 table document.add_table(rows5, cols7)#修改第2行第3列单元格的内容为中国 table.cell(1,2).text中国 #修改第3行第4列单元格的内容…...

2023_11_6 每日半小时 SQL 刷题
文章目录 1. 查询所有列题目描述SQL 语句编写 2. 查询多列题目描述SQL 语句编写 3. 查询结果去重题目描述SQL 语句编写 4. 查询结果限制返回行数题目描述SQL 语句编写 5. 将查询后的列重新命名题目描述SQL 语句编写 语法小总结 1. 查询所有列 题目链接:SQL1 查询所…...
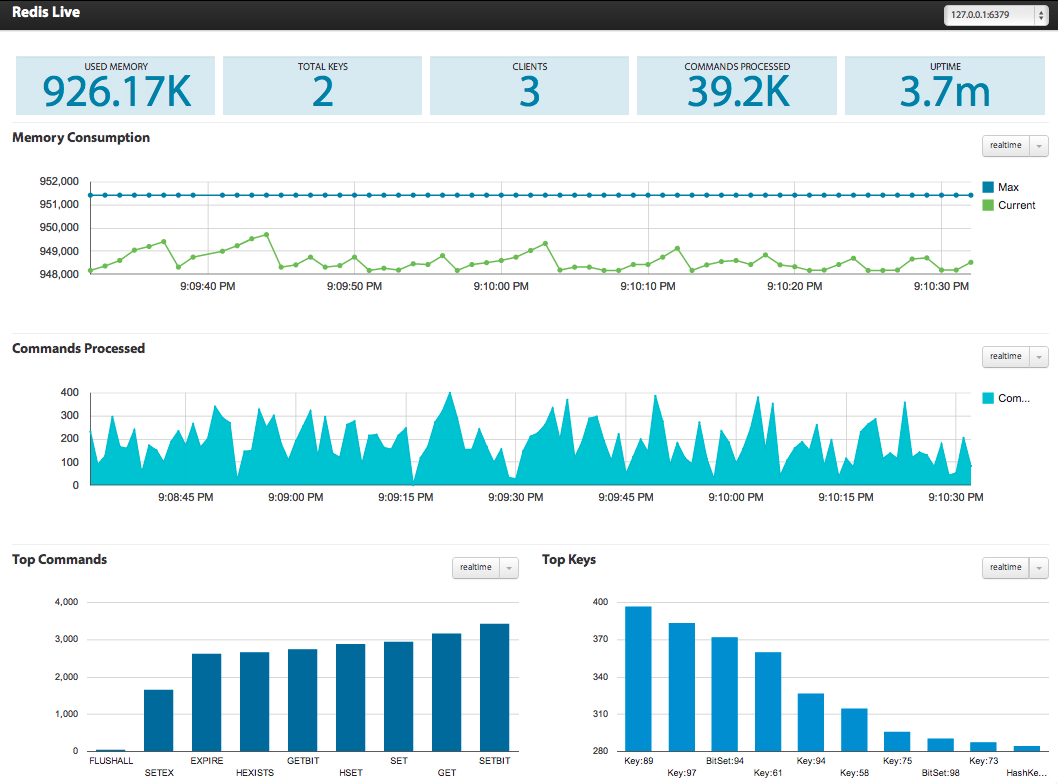
Redis系列-Redis性能优化与安全【9】
目录 Redis系列-Redis性能优化与安全【9】Redis性能优化策略Redis安全设置与防护措施Redis监控与诊断工具介绍 七、Redis应用案例与实战八、Redis未来发展与趋势 个人主页: 【⭐️个人主页】 需要您的【💖 点赞关注】支持 💯 Redis系列-Redis性能优化与安…...
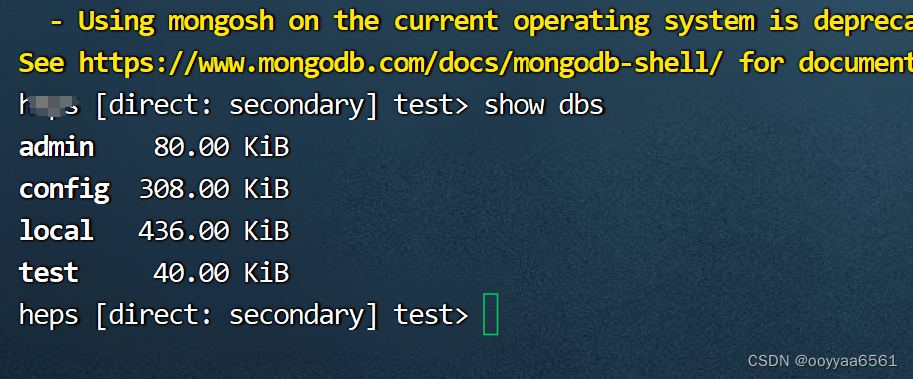
centos7下安装主从仲裁三台结构的MongoDB 7.0.4
安装手册英文版在这里 https://www.mongodb.com/docs/v7.0/tutorial/install-mongodb-on-red-hat/ 我的安装过程 1)基础安装 1、创建 /etc/yum.repos.d/mongodb-org-7.0.repo文件 下面的代码复制到这个文件中,保存 [mongodb-org-7.0] nameMongoDB Re…...

2258. 逃离火灾 : 详解如何从「二分」到「分类讨论」(图解过程)
题目描述 这是 LeetCode 上的 「2258. 逃离火灾」 ,难度为 「困难」。 Tag : 「多源 BFS」、「二分」、「预处理」 给你一个下标从 0 开始大小为 m x n 的二维整数数组 grid,它表示一个网格图。 每个格子为下面 个值之一: 0 表示草地。 1 表…...

基于SSM框架的共享单车管理系统小程序系统的设计和实现
基于SSM框架的共享单车管理系统小程序系统的设计和实现 源码传送入口前言主要技术系统设计功能截图Lun文目录订阅经典源码专栏Java项目精品实战案例《500套》 源码获取 源码传送入口 前言 随着科学技术的飞速发展,各行各业都在努力与现代先进技术接轨,…...
COOHOM通过采用亚马逊云科“专库专用”的方式,为云原生的构建提供稳定的数据支撑
全球化浪潮下,面对全球化业务发展带来的新需求与新挑战,越来越多的企业开启了云原生构建旅程,以推动业务系统快速迭代,为国际业务的拓展打下坚实的基础。COOHOM是杭州群核信息技术有限公司旗下的国际化品牌。为全球企业和个人提供…...
Java根据一个List内Object的两个字段去重
背景 在Java开发过程中,我们经常会遇到需要对List进行去重的需求。 其中常见的情况是,将数组去重,或者将对象依据某个字段去重。这两种方式均可用set属性进行处理。 今天讨论,有一个List,且其中的元素是自定义的对象&…...
运维那些事儿|2023年,运维还有出路吗?
作为一名运维,不知道你有没有这样的感受。 觉得自己的工作没什么成长空间。每天装个系统、跑个机房、跑个脚本,忙来忙去也没忙出来什么名堂,含金量低不说,薪资也一直没见涨,所以你开始陷入迷茫,会疑惑&…...
数据结构——二叉树(2)
接上一篇文章http://t.csdnimg.cn/nsKsW,本次我们接着讲解关于二叉树的相关知识。 一、二叉树的相关性质: 1. 若规定根节点的层数为 1 ,则一棵非空二叉树的 第 i 层上最多有 2^(i-1) 个结点. 2. 若规定根节点的层数为 1 ,则 深度…...
aosp定制android系统
目录 AOSP 准备工作(配置) 确定机型和版本 初始化 git安装 curl安装 同步源码 环境变量 创建aosp目录 指定同步版本 解下来安装编译需要的依赖 编译aosp源码 刷入系统 AOSP 全称 Android Open Source Project 是指Android开源项目,它是由Google主导的…...

PPO算法原理与Docker构建优化实践
1. PPO算法核心原理剖析PPO(Proximal Policy Optimization)作为当前强化学习领域最主流的策略优化算法之一,其核心创新在于通过剪切机制实现了策略更新的稳定性。要真正理解PPO的数学本质,我们需要从策略梯度定理的基础开始拆解。…...

终极Django REST Framework合规指南:如何轻松满足GDPR与HIPAA法规要求
终极Django REST Framework合规指南:如何轻松满足GDPR与HIPAA法规要求 【免费下载链接】django-rest-framework Web APIs for Django. 🎸 项目地址: https://gitcode.com/gh_mirrors/dj/django-rest-framework Django REST Framework(…...

中国独立开发者创意宝库:从AI工具到趣味游戏一站式发现指南
中国独立开发者创意宝库:从AI工具到趣味游戏一站式发现指南 【免费下载链接】chinese-independent-developer 👩🏿💻👨🏾💻👩🏼💻👨&#x…...

ETASOLUTIONS钰泰 ETA9740E8A ESOP8 电池管理
特性单电感双向功率转换自动模式切换开关充电器5V同步升压,效率高达96%最大充电电流达3A,放电电流达2.4A无电池检测无需外部检测电阻4个LED电量指示...

深度测评2026年家政小程序推荐榜单:解决生活难题的前3款高口碑产品
家政小程序作为2026年数字生活服务的重要组成部分,正通过技术革新与模式优化深度融入用户的日常家务场景。本次深度解析聚焦于行业前三强的核心方案,从服务架构、操作效率到口碑数据展开横向比对,为家庭及个人用户提供选型参考。领先的家政小…...

视觉语言模型个性化技术:CoViP框架解析与应用
1. 视觉语言模型个性化技术现状与挑战视觉语言模型(Vision-Language Models, VLMs)作为多模态人工智能的核心技术,近年来在图像描述生成、视觉问答等任务上取得了显著进展。然而,现有模型在个性化场景中仍面临根本性挑战——无法有…...

STM32外部Flash编程与Keil MDK算法开发指南
1. STM32外部Flash编程基础解析在嵌入式系统开发中,外部Flash存储器扩展已成为应对大容量存储需求的常见解决方案。当STM32微控制器的内部Flash容量不足以容纳应用程序代码或数据资源时,外部Flash器件通过SPI、Quad-SPI或Octo-SPI等接口为系统提供额外的…...

智能桌面革命:3步构建高效数字工作空间的完整指南
智能桌面革命:3步构建高效数字工作空间的完整指南 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 你是否每天在混乱的桌面图标中寻找文件,浪费宝贵的几…...

Sunshine游戏串流完全指南:从零开始搭建自托管游戏服务器
Sunshine游戏串流完全指南:从零开始搭建自托管游戏服务器 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine Sunshine是一款强大的自托管游戏串流服务器,专为M…...

3步解锁Mac触控板原生体验:Windows用户必读的精准触控驱动配置指南
3步解锁Mac触控板原生体验:Windows用户必读的精准触控驱动配置指南 【免费下载链接】mac-precision-touchpad Windows Precision Touchpad Driver Implementation for Apple MacBook / Magic Trackpad 项目地址: https://gitcode.com/gh_mirrors/ma/mac-precision…...