【C++】AVL树的4中旋转调整
文章目录
- 前提
- 一、AVL树的结构定义
- 二、AVL的插入(重点)
- 1. 插入的结点在较高左子树的左侧(右单旋)
- 2. 新节点插入较高右子树的右侧(左单旋)
- 3.新结点插入较高右子树的左侧(先右单旋再左单旋)
- 4. 新节点插入较高左子树的右侧(先左单旋再右单旋)
- 插入的整体代码
前提
二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序二叉搜索树将退化为单支树,查 找元素相当于在顺序表中搜索元素,效率低下。
因此,两位俄罗斯的数学家G.M.Adelson-Velskii 和E.M.Landis在1962年发明了一种解决上述问题的方法:
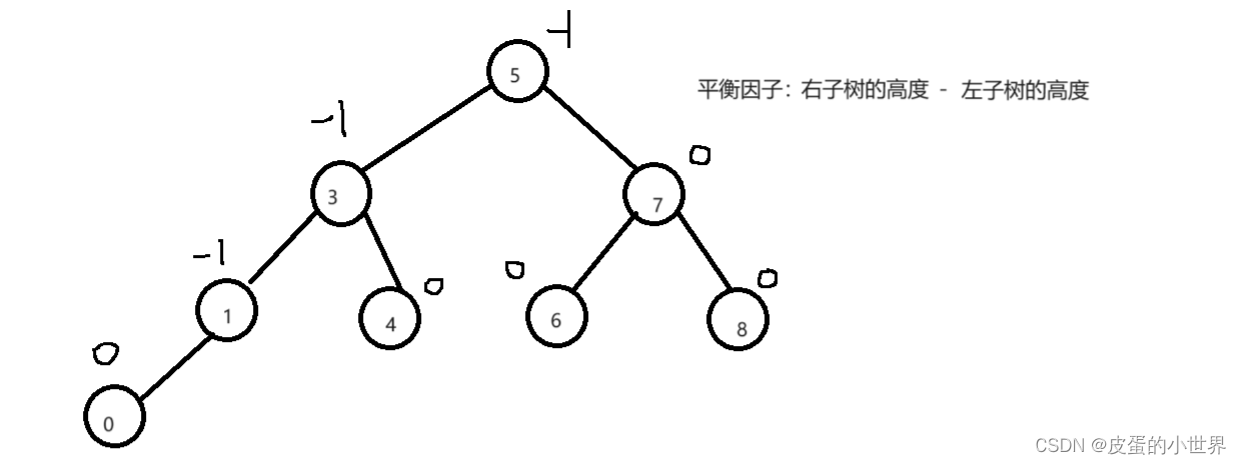
当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(-1、0、1),即可降低树的高度,从而减少平均搜索长度。
由此,该树被称为AVL树,即两位科学家名字的第一个字母。
一棵AVL树或者是空树,或者是具有以下性质的二叉搜索树:
- 它的左右子树都是AVL树
- 左右子树的高度差(简称平衡因子)的绝对值不超过1
如果一棵二叉搜索树是高度平衡的,它就是AVL树。如果它有n个结点,其高度可保持在O(logN),搜索时间复杂度O(logN)。
提示:以下是本篇文章正文内容,下面案例可供参考
一、AVL树的结构定义
树节点的结构创建:
template<class K, class V>
struct AVLTreeNode
{AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;pair<K, V> _kv; //键值对来存储 K AND Vint _bf;//平衡因子//AVL树并没有规定必须要选择设计平衡因子,只是一个实现的选择,方便控制//构造函数AVLTreeNode(const pair<K, V>& kv):_kv(kv), _left(nullptr), _right(nullptr), _parent(nullptr), _bf(0){}};
树的框架创建:
template<class K, class V>
class AVLTree
{typedef AVLTreeNode<K, V> Node; //结点typedef
public:
//......
private:Node* _root = nullptr;
};
二、AVL的插入(重点)
AVL树就是在二叉搜索树的基础上引入了平衡因子,因此AVL树也可以看成是二叉搜索树。AVL树的插入过程可以分为两步:
- 按照二叉搜索树的方式插入新节点
- 调整节点的平衡因子
(寻找位置->创建结点->插入节点->更新平衡因子->调整子树->形成AVL树)
1. 插入的结点在较高左子树的左侧(右单旋)
这样会造成parent的平衡因子变成-2, 当前节点(不是新增节点)的平衡因子变成-1
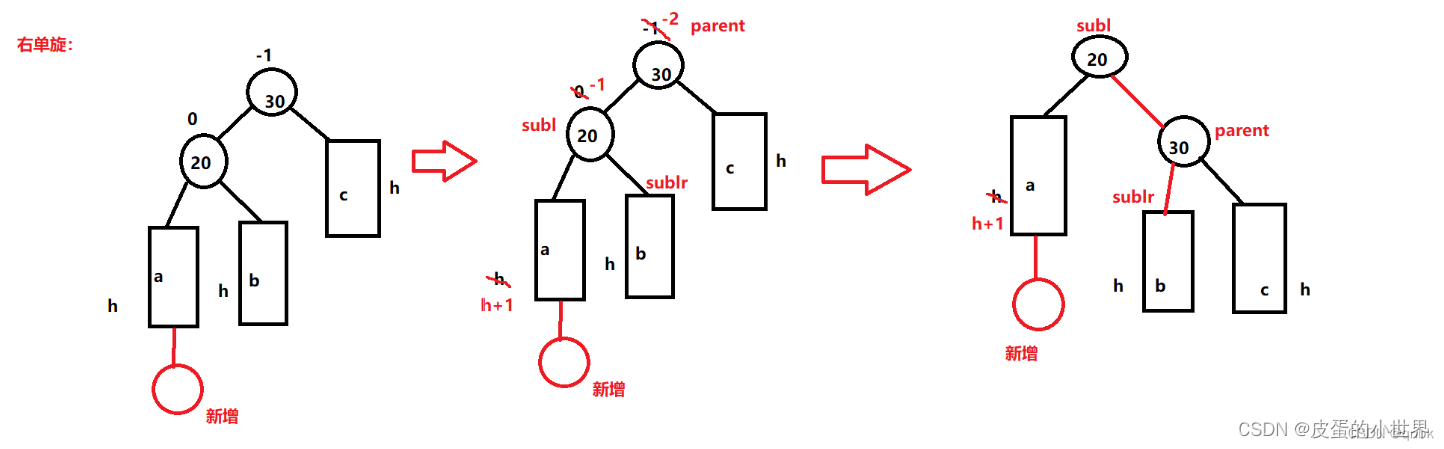
//右单旋void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR){subLR->_parent = parent;}Node* pParent = parent->_parent;subL->_right = parent;parent->_parent = subL;if (pParent == nullptr){_root = subL;_root->_parent = nullptr;}else{if (pParent->_left == parent){pParent->_left = subL;}else pParent->_right = subL;subL->_parent = pParent;}// 更新平衡因子parent->_bf = subL->_bf = 0;}2. 新节点插入较高右子树的右侧(左单旋)
这样会造成parent的平衡因子变成2,当前节点(不是新增节点)的平衡因子变成1
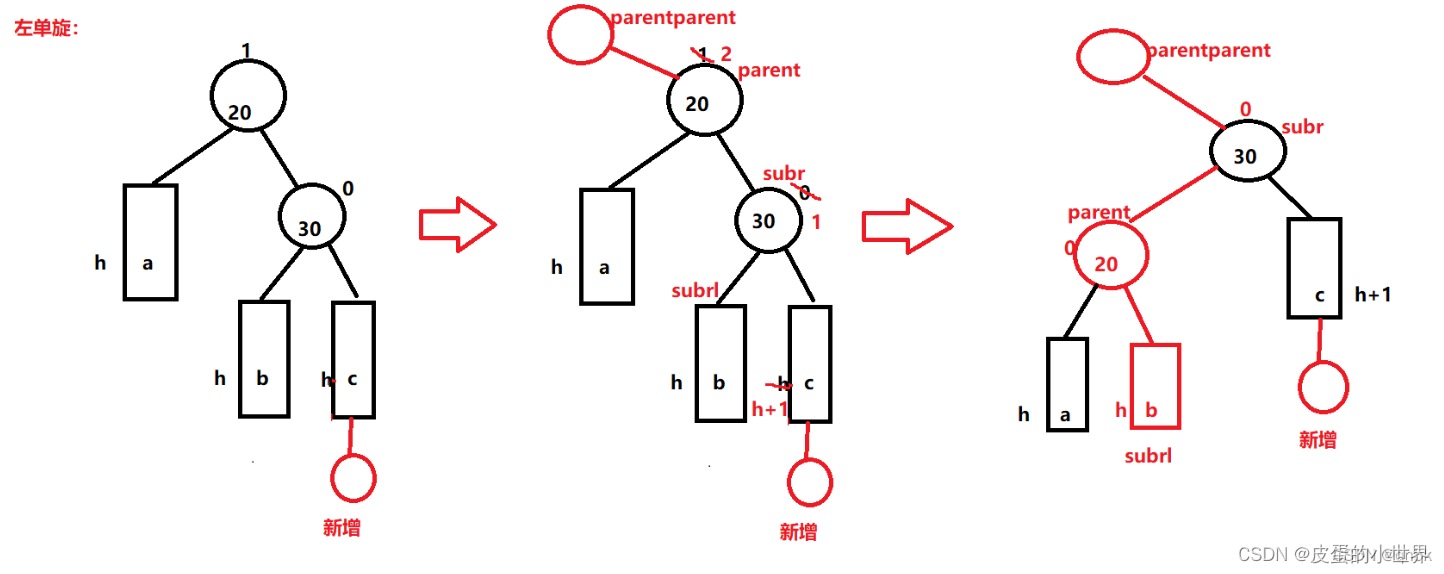
//左单旋void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL){subRL->_parent = parent;}Node* pParent = parent->_parent;subR->_left = parent;parent->_parent = subR;if (pParent == nullptr){_root = subR;_root->_parent = nullptr;}else{if (pParent->_left == parent){pParent->_left = subR;}else pParent->_right = subR;subR->_parent = pParent;}//更新平衡因子subR->_bf = parent->_bf = 0;}
3.新结点插入较高右子树的左侧(先右单旋再左单旋)
会造成parent的平衡因子变成2, 当前节点(不是新增节点)平衡因子变成-1
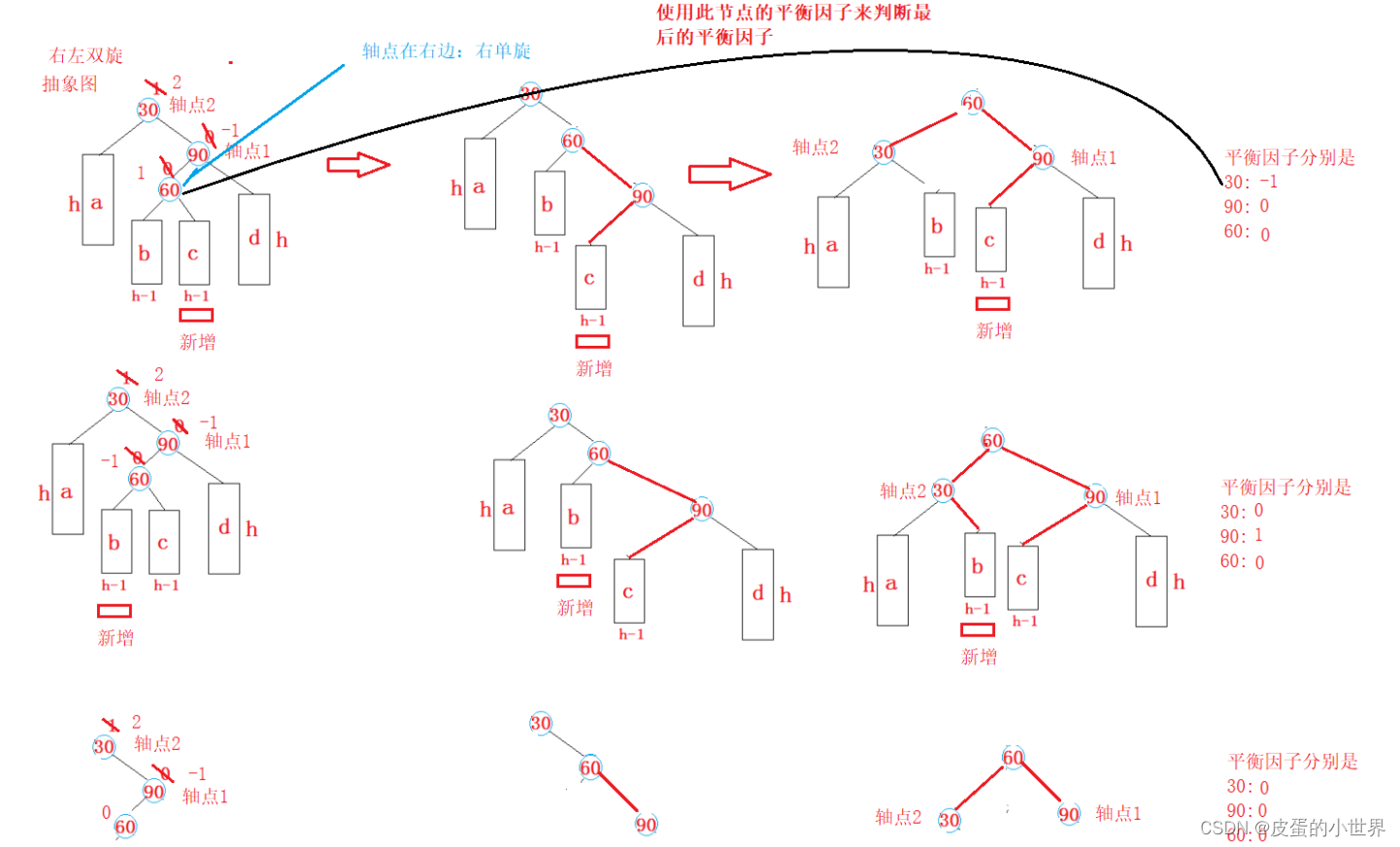
void RotateRL(Node* parent){Node* subR = parent->_right; //左子树60Node* subRL = subR->_left;// 右子树的左子树90int bf = subRL->_bf;// 记录SubRLd 平衡因子// 先以SubR为轴进行右单旋RotateR(parent->_right);// 再进行左单旋RotateL(parent);if (bf == -1){parent->_bf = 0;subR->_bf = 1;subRL->_bf = 0;}else if (bf == 0){parent->_bf = 0;subR->_bf = 0;subRL->_bf = 0;}else if (bf == 1){parent->_bf = -1;subR->_bf = 0;subRL->_bf = 0;}else assert(0);}void RotateLR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 0){parent->_bf = 0;subL->_bf = 0;subLR->_bf = 0;}else if (bf == -1){subLR->_bf = 0;subL->_bf = 0;parent->_bf = 1;}else if (bf == 1){subL->_bf = -1;parent->_bf = 0;subLR->_bf = 0;}else assert(0);}
4. 新节点插入较高左子树的右侧(先左单旋再右单旋)
这样会造成parent的平衡因子变成-2, 当前结点的平衡因子变成1
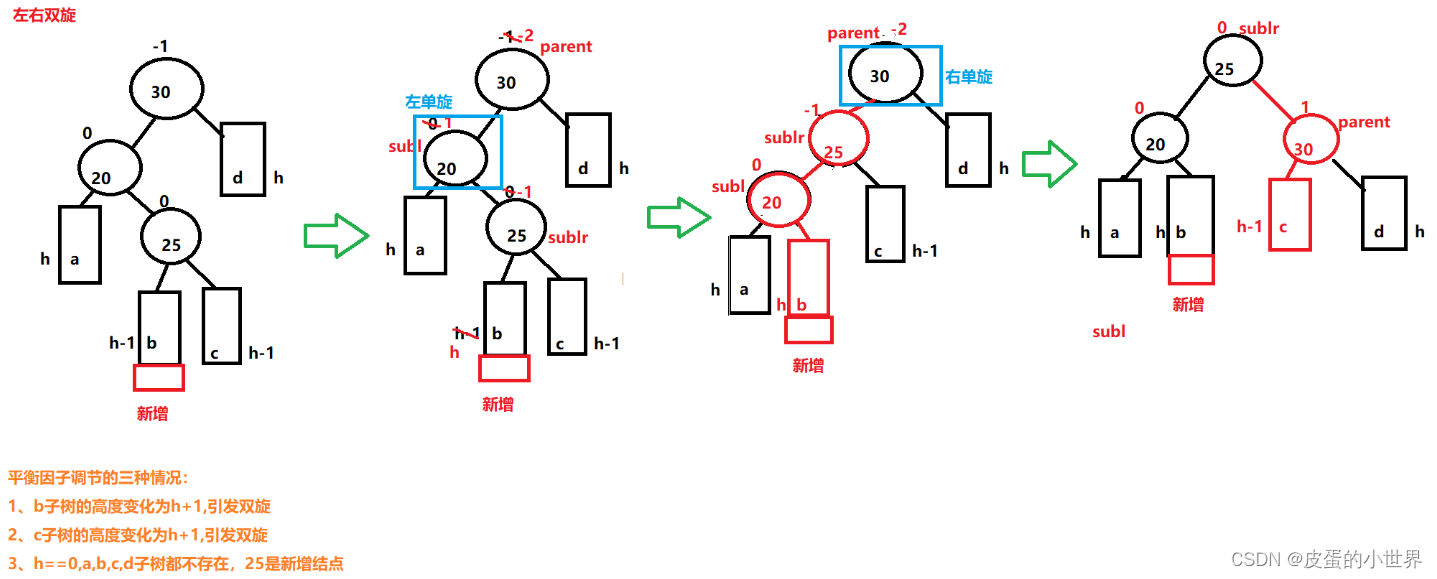
void RotateLR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 0){parent->_bf = 0;subL->_bf = 0;subLR->_bf = 0;}else if (bf == -1){subLR->_bf = 0;subL->_bf = 0;parent->_bf = 1;}else if (bf == 1){subL->_bf = -1;parent->_bf = 0;subLR->_bf = 0;}else assert(0);}
插入的整体代码
bool Insert(const pair<K, V>& kv)
{if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;//parent是cur的父节点Node* cur = _root;//cur往下走while (cur){if (cur->_kv.first > kv.first)//我比你小,往左找{parent = cur;cur = cur->_left;}else if (cur->_kv.first < kv.first)//我比你大,往右找{parent = cur;cur = cur->_right;}else{return false;//AVL树不允许有重复值}}//走到这里就表示找到我们要插入kv值的正确位置了,准备插入节点..........cur = new Node(kv);if (parent->_kv.first < kv.first)//如果new的节点比父节点大,那么父节点的右指针指向new节点{parent->_right = cur;cur->_parent = parent;}else//如果new的节点比父节点小,那么父节点的左指针指向new节点{parent->_left = cur;cur->_parent = parent;}//开始更新平衡因子while (parent)//更新到根节点才算更新完平衡因子{//1、如果是右子树新增结点,那么父节点的_bf就加一//2、如果是左子树新增结点,那么父节点的_bf就减一//+1和-1大家可以自己决定,只要是对的,怎么都行!if (cur == parent->_right){parent->_bf++;}else{parent->_bf--;}// 是否继续更新依据:子树的高度是否变化// 1、parent->_bf == 0说明之前parent->_bf是 1 或者 -1// 说明之前parent一边高一边低,这次插入填上矮的那边,parent所在子树高度不变,不需要继续往上更新// 2、parent->_bf == 1 或 -1 说明之前是parent->_bf == 0,两边一样高,现在插入一边更高了,// parent所在子树高度变了,继续往上更新// 3、parent->_bf == 2 或 -2,说明之前parent->_bf == 1 或者 -1,现在插入严重不平衡,违反规则// 就地处理--旋转// 旋转:// 1、让这颗子树左右高度不超过1// 2、旋转过程中继续保持他是搜索树// 3、更新调整孩子节点的平衡因子// 4、让这颗子树的高度跟插入前保持一致//如果新增节点cur,使得父节点parent的平衡因子变成了0,那么表示该插入节点对整棵树的平衡因子没有影响//不用向上判断,可以直接退出if (parent->_bf == 0){break;}//如果新增cur使得父节点parent的平衡因子变成了1或者-1,那么我们要继续向上判断是否对上面的节点的//说明之前的平衡被打破,子树的高度变化了,有可能会造成父节点的平衡因子出现问题else if (parent->_bf == 1 || parent->_bf == -1){cur = parent;parent = parent->_parent;}//当平衡因子出现2 or -2 的时候就需要调整子树else if (parent->_bf == 2 || parent->_bf == -2){if (parent->_bf == 2 && cur->_bf == 1)//左旋{RotateL(parent);}else if (parent->_bf == -2 && cur->_bf == -1)//右旋{RotateR(parent);}else if (parent->_bf == -2 && cur->_bf == 1)//左右旋{RotateLR(parent);}else if (parent->_bf == 2 && cur->_bf == -1)//右左旋{RotateRL(parent);}else{assert(false);}break;//旋转完一次就可以退出了,因为旋转的时候我们已经向上判断了,除非新插入,否则树就是avl树}else{assert(false);//这里直接报错,走到这里树就已经不是AVL树了}}return true;
}相关文章:
【C++】AVL树的4中旋转调整
文章目录 前提一、AVL树的结构定义二、AVL的插入(重点)1. 插入的结点在较高左子树的左侧(右单旋)2. 新节点插入较高右子树的右侧(左单旋)3.新结点插入较高右子树的左侧(先右单旋再左单旋&#x…...
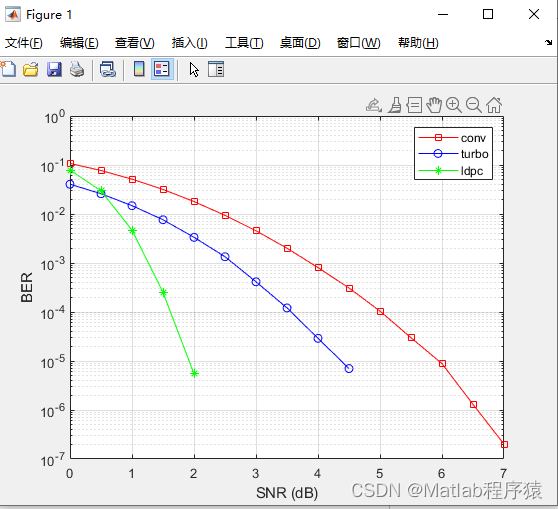
【MATLAB源码-第69期】基于matlab的LDPC码,turbo码,卷积码误码率对比,码率均为1/3,BPSK调制。
操作环境: MATLAB 2022a 1、算法描述 本文章介绍了卷积码、Turbo码和LDPC码。以相同的码率仿真这三种编码,并对比其误码率性能 信源输出的数据符号(二进制)是相互独立和等概率的; 信道是加性白高斯噪声信道&#…...

Java获取时间戳、字符串和Date对象的相互转换、日期时间格式化、获取年月日
获取时间戳(自1970年1月1日经历的毫秒数值) package org.example;import java.util.Date;public class Main {public static void main(String[] args) {Date date1 new Date(1699540662210L);System.out.println(date1.getTime());Date date2 new Dat…...

用c语言实现矩阵转置
下面是在 C 语言中实现矩阵转置的示例代码: #include <stdio.h> #define ROWS 3 #define COLS 3 void transpose(int matrix[ROWS][COLS]) { int temp; for(int i0; i<ROWS; i) { for(int j0; j<i; j) { temp matrix[i][j]; matrix[i][j] matrix[j]…...
)
蓝桥杯官网练习题(移动距离)
题目描述 X 星球居民小区的楼房全是一样的,并且按矩阵样式排列。其楼房的编号为 1,2,3, 当排满一行时,从下一行相邻的楼往反方向排号。 比如:当小区排号宽度为 6 时,开始情形如下: 1 2 3 4 5 6 12 …...
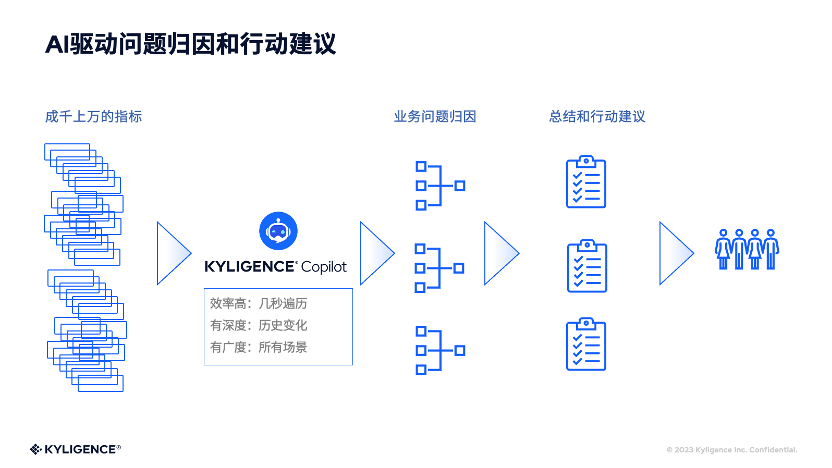
不止于“初见成效”,阿斯利康要让数据流转,以 AI 带动决策智能
“阿斯利康数字化成果在进博会上引人注目,令我感到非常高兴。”这是阿斯利康代表的感慨。 数字化建设目标是利用先进技术来提高企业运营效率,降低成本。在第六届进博会的7.2 B2-01展区,阿斯利康不仅展示了全球领先的生物医药和医疗器械成果&a…...
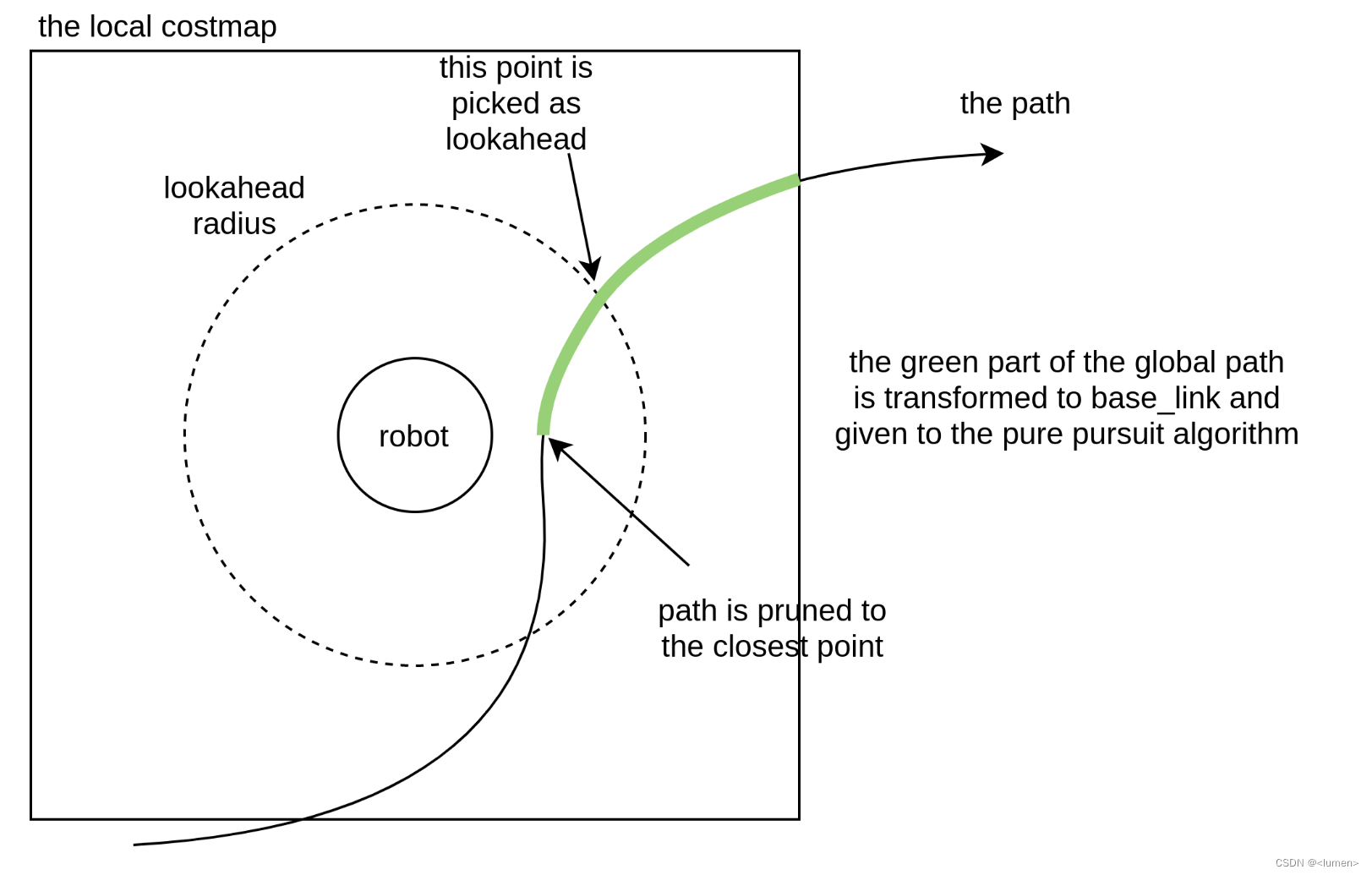
nav2 调节纯追踪算法
纯追踪算法 纯追踪基础 The core idea is to find a point on the path in front of the robot and find the linear and angular velocity to help drive towards it. 核心思想是在机器人前方的路径上找到一个点,并找到一个合适的线速度和角速度,以驱…...
安装RabbitMQ
安装RabbitMQ 下载需要的两个包 # 这直接就可以安装了,下面 ‘上传对应的rmp包’ 操作 [rootrabbitmq-1 ~]# curl -s https://packagecloud.io/install/repositories/rabbitmq/erlang/script.rpm.sh | sudo bash [rootrabbitmq-1 ~]# yum install erlang-21.3.8.2…...
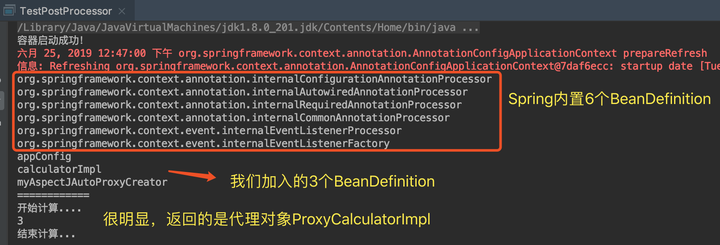
Spring基础(1):两个概念
最近看了点Spring的源码,于是来稍微扯一扯,希望能帮一部分培训班出身的朋友撕开一道口子,透透气。 广义上的Spring指的是Spring整个项目,包含SpringBoot、SpringCloud、SpringFramework、SpringData等等, 本系列文章…...

国产化精密划片机已得到国内更多厂家青睐
国产化精密划片机在近年来得到了国内许多厂家的青睐,这是因为精密划片机在工业生产中有着重要作用。这种设备主要用于高精密切割加工,适用于多种材料,包括硅、石英、氧化铝、氧化铁等。 以精密晶圆划片机为例,这种设备采用了自主研…...

Voice Control for ChatGPT简单高效的与ChatGPT进行交流学习。
快捷又不失灵活性 日常生活中,我们与亲人朋友沟通交流一般都是喜欢语音的形式来完成的,毕竟相对于文字来说语音就不会显的那么的苍白无力,同时最大的好处就是能解放我们的双手吧,能更快实现两者间的对话,沟通便更高效…...
flutter生态一统甜夏 @Android @ios @windowse @macos @linux @Web
(愿景)G o o g l e 中 国flutter生态一统天下(IT) Web Android ios Windowse Macos Linux Google中国https://space.bilibili.com/64169458 https://pub-web.flutter-io.cn 构建 Flutter Web 应用 构建 Flutter Web 应用 - Flutter 中文文档 - Flutter 中文开发者网站 …...
计算机基础知识49
三板斧的使用(views.py) 三个方法:HttpResponse: 返回的是字符串render : 返回html文件redirect : 返回加载HTML页面的 def html(request):print(from html)# return HttpResponse(request) # 它返回的是字符串return render(request,html.html) # 返回html# ret…...
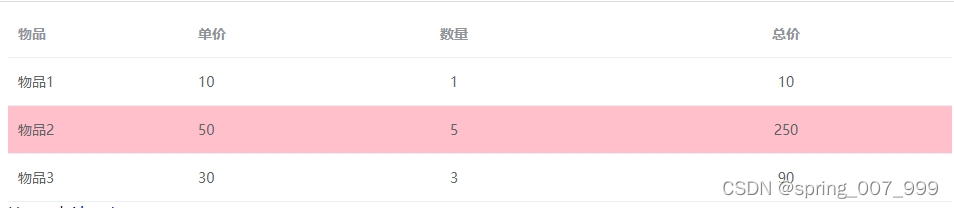
el-table给某一行加背景色
数据列表中总价大于100的一行背景色为红色,效果图如下: 代码示例: <template><div id"app"><!-- 测试区域!!!!!!!!&am…...

搭建 Makefile+OpenOCD+CMSIS-DAP+Vscode arm-none-eabi-gcc 工程模板
STM32F407-GCC-Template Arm-none-eabi-gcc MakefileOpenOCDCMSIS-DAPVscode工程模板 一、本次环境搭建所用的软硬件 1)Windows or Linux (本文以Windows为主) 2)JLink、Daplink、Wch-Link烧录器 3)GNU Arm Embedded Toolchain交叉编译…...
格式的测试)
Unity场景ab包加载压缩(LZ4,LZMA)格式的测试
情况 最近场景越来越大,大概800M的场景加载时间可能长达40秒左右,所以需要测试看看发生了什么。 测试环境 测试环境Win10,21thI5-12600KF,32GRam , Nvidia GF RTX2060 32G Scene1大小:741M 加载代码 首…...
私有化部署大模型:5个.Net开源项目
从零构建.Net前后端分离项目 今天一起盘点下,10月份推荐的5个.Net开源项目(点击标题查看详情)。 1、BootstrapBlazor企业级组件库:前端开发的革新之路 BootstrapBlazor是一个用于构建现代Web应用程序的开源框架,它基…...

安卓系统手机便签app使用哪一款?
在现代快节奏的生活中,我们经常会遇到各种繁忙的事务和容易遗忘的备忘事项。为避免大家遗忘重要的事情,大家可以在常用的手机上安装记录备忘事项的工具,为了帮助安卓用户高效地记录和管理这些信息,今天我将向大家推荐一款功能强大…...
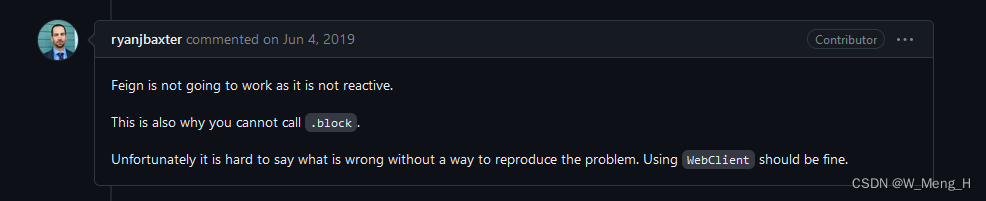
SpringCloud-Gateway无法使用Feign服务(2021.X版本)
Spring Cloud Gateway 2021.x版本,无法使用Feign调用其他服务接口。 问题原因: 在官网的 issue 里面找到了相关的问题。 How to call another micro-service on GatewayFilterFactory ? Issue #1090 spring-cloud/spring-cloud-gateway GitHubHel…...
基于SSM的建筑装修图纸管理平台
末尾获取源码 开发语言:Java Java开发工具:JDK1.8 后端框架:SSM 前端:采用JSP技术开发 数据库:MySQL5.7和Navicat管理工具结合 服务器:Tomcat8.5 开发软件:IDEA / Eclipse 是否Maven项目&#x…...

ncmdumpGUI:解锁网易云音乐NCM格式的C开源解决方案
ncmdumpGUI:解锁网易云音乐NCM格式的C#开源解决方案 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾经在网易云音乐下载了心爱的歌曲&…...

LILYGO T-Connect Pro工业物联网控制器全解析
1. LILYGO T-Connect Pro工业物联网控制器深度解析在工业自动化领域,设备联网和远程控制的需求日益增长。LILYGO T-Connect Pro作为一款基于ESP32-S3的多协议工业物联网控制器,集成了Ethernet、WiFi、蓝牙、LoRa等多种通信方式,以及RS232、RS…...

ARM Cortex-R5双发射与ECC内存优化实战
1. ARM Cortex-R5处理器双发射机制深度解析1.1 双发射技术基础原理双发射(Dual Issue)是现代处理器提升指令级并行度(ILP)的关键技术之一。在ARM Cortex-R5处理器中,这一机制允许在单个时钟周期内同时发射两条指令到不同的执行单元。这种并行执行能力直接提升了每周…...


3步解锁Steam卡片自动化收集:Idle Master智能挂卡完全指南
3步解锁Steam卡片自动化收集:Idle Master智能挂卡完全指南 【免费下载链接】idle_master Get your Steam Trading Cards the Easy Way 项目地址: https://gitcode.com/gh_mirrors/id/idle_master 还在为Steam交易卡片的手动收集而烦恼吗?每天需要…...

终极TrollInstallerX指南:3分钟在iOS设备上安全安装TrollStore
终极TrollInstallerX指南:3分钟在iOS设备上安全安装TrollStore 【免费下载链接】TrollInstallerX A TrollStore installer for iOS 14.0 - 16.6.1 项目地址: https://gitcode.com/gh_mirrors/tr/TrollInstallerX TrollInstallerX是一款专为iOS 14.0到16.6.1设…...
✅)
计算机毕业设计:Python股票投资辅助决策系统 django框架 request爬虫 协同过滤算法 数据分析 可视化 大数据 大模型(建议收藏)✅
博主介绍:✌全网粉丝10W,前互联网大厂软件研发、集结硕博英豪成立软件开发工作室,专注于计算机相关专业项目实战6年之久,累计开发项目作品上万套。凭借丰富的经验与专业实力,已帮助成千上万的学生顺利毕业,…...

闲鱼自动化数据采集系统:打造你的智能二手商品监控助手
闲鱼自动化数据采集系统:打造你的智能二手商品监控助手 【免费下载链接】idlefish_xianyu_spider-crawler-sender 闲鱼自动抓取/筛选/发送系统,xianyu spider crawler blablabla 项目地址: https://gitcode.com/gh_mirrors/id/idlefish_xianyu_spider-…...


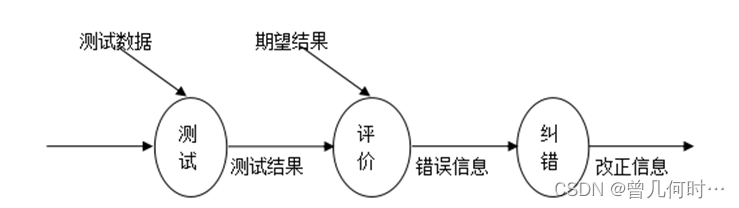
eTest 自动化测试关于团队协作问题
各位伙伴大家好,经过一段时间的开源试用,我们收到的很多反馈,最多的问题就是团队内部怎么协作?今天我们就来简单聊聊团队内部协作如何使用自动化测试工具。 eTest自动化测试目前还没有推出云部署 开发方式(我们正在加…...