STM32外设系列—MPU6050角度传感器
🎀 文章作者:二土电子
🌸 关注公众号获取更多资料!
🐸 期待大家一起学习交流!
文章目录
- 一、MPU6050简介
- 二、MPU6050寄存器简介
- 2.1 PWR_MGMT_1寄存器
- 2.2 GYRO_CONFIG寄存器
- 2.3 ACCEL_CONFIG寄存器
- 2.4 PWR_MGMT_2寄存器
- 三、程序设计
- 3.1 I2C程序设计
- 3.2 MPU6050初始化程序
- 3.3 DMP相关程序
- 3.4 获取三轴角度信息
- 四、实现效果
一、MPU6050简介
MPU6050是由InvenSense公司生产的全球首款整合性六轴运动处理模块,它可以实时获取运动物体的在三维坐标系内的偏转角度,如图所示。
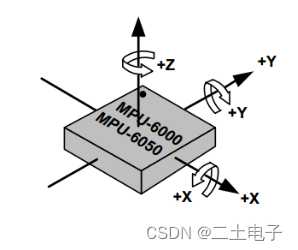
其中roll为绕X轴偏转的角度,pitch为绕Y轴偏转的角度,yaw为绕Z轴偏转的角度。
MPU6050通过IIC协议与单片机进行通讯,传递偏移角度信息。虽然MPU6050角度传感器体积小,功能强大,但是其内部噪音较大,如果不进行滤波,将会对获取到的偏转角度的准确性带来严重的影响。为此,MPU6050芯片内部集成了一个DMP数据处理模块,该模块已经内置了滤波算法,使MPU6050输出数据的准确性得到了保障。
之所以说MPU6050是六轴运动处理模块,是因为它不仅集成了三轴陀螺仪,还集成了一个三轴加速度计,不仅可以输出三轴角度信息,还可以输出三轴加速度信息。除此之外,MPU6050还集成了一个温度传感器,可以输出温度信息。
下面我们简单介绍一下MPU6050的引脚。通常我们买到的MPU6050大概是这个样子
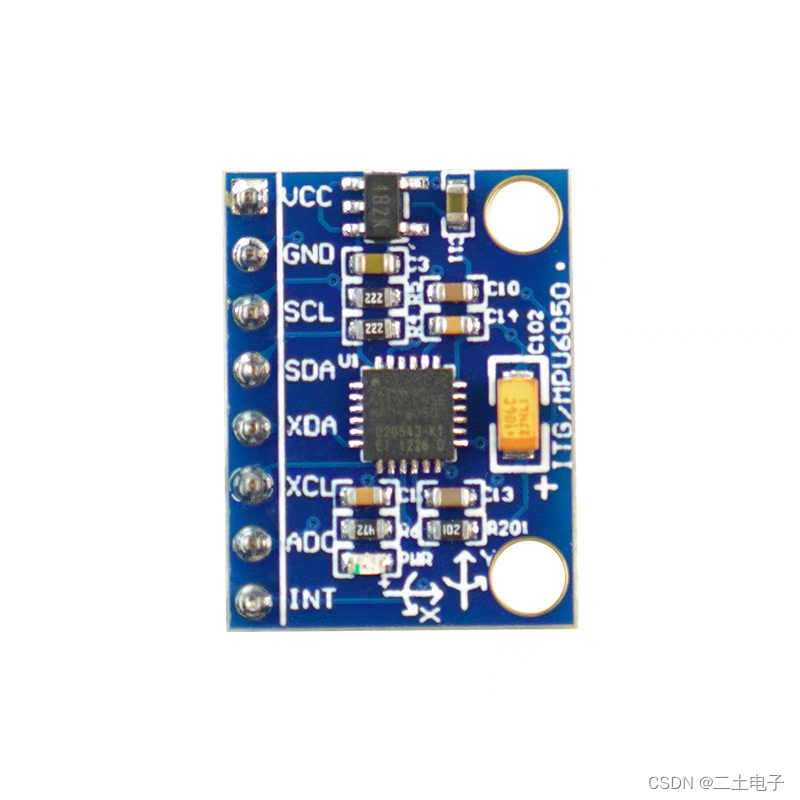
- VCC
电源正极,通常接3.3V - GND
电源地 - SCL
IIC的时钟线 - SDA
IIC的数据线 - XDA
外接IIC设备的数据线 - XCL
外接IIC设备的时钟线 - AD0
控制IIC从属地址,接地时地址为0X68,如果接VCC的话,从属地址为0X69 - INT
中断数字输出
通过对MPU6050的引脚介绍我们可以知道,MPU6050可以外接一个IIC设备,通常可以外接一个三轴的磁力计来实现完整的九轴输出。
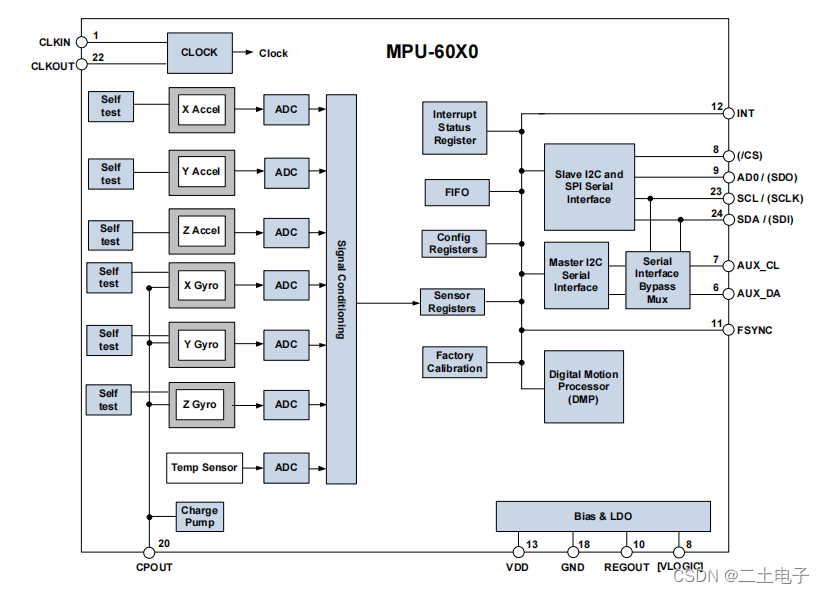
这里放一下MPU60X0数据手册中的系统结构图,基本信息上面已经介绍了,就不再进行详细标注了
二、MPU6050寄存器简介
在开始学习怎么使用MPU6050之前,我们先简单看一下它的一些寄存器。
这里贴一下MPU6050的数据手册和寄存器手册,但是只有英文版的,如果大家只是想了解一些关键寄存器的介绍,又不想自己看英文手册的话,可以继续往下看,下面会有一些关键寄存器的中文介绍。
链接:https://pan.baidu.com/s/1r-xDm7QUp5NfVRPF4IMX9g
提取码:ertu
2.1 PWR_MGMT_1寄存器
首先看一下寄存器手册中对它的介绍。

- DEVICE_RESET
当该位设置为1时,MPU6050会将所有内部寄存器重置为其默认值。在重置完成后,该位将自动清除为0。 - SLEEP
当该位设置成1时,MPU6050进入休眠模式。 - CYCLE
当这个位被设置为1并且睡眠被禁用时,MPU-60X0将在睡眠模式和醒来之间循环,以由LP_WAKE_CTRL(寄存器108)确定的速率从加速度计中获取单个数据样本。 - TEMP_DIS
当设置为1时,此位将禁用温度传感器。 - CLKSEL
3位无符号值。指定该设备的时钟源。
2.2 GYRO_CONFIG寄存器

该寄存器用于触发陀螺仪自检,并配置陀螺仪的量程范围。陀螺仪自检允许用户测试陀螺仪的机械和电气部分。通过控制该寄存器的XG_ST、YG_ST和ZG_ST位,可以激活每个陀螺仪轴的自检。每个轴的自检可以独立进行,也可以同时进行。
下面我们仔细看一下每一位的作用
- XG_ST
设置此位会开启X轴陀螺仪自检。 - YG_ST
设置此位会开启Y轴陀螺仪自检。 - ZG_ST
设置此位会开启Z轴陀螺仪自检。 - FS_SEL
2位无符号值。选择陀螺仪的量程范围。
| FS_SEL | 陀螺仪传感器满量程范围 |
|---|---|
| 0 | ±250°/s |
| 1 | ±500°/s |
| 2 | ±1000°/s |
| 3 | ±2000°/s |
这里°/s是角速度的单位。
2.3 ACCEL_CONFIG寄存器

该寄存器用于触发加速度计的自检,并配置加速度计的量程范围。加速度计自检允许用户测试加速度计的机械和电气部分。通过控制该寄存器的XA_ST、YA_ST和ZA_ST位,可以激活每个加速度计轴的自检。每个轴的自检可以独立进行,也可以同时进行。
下面我们仔细看一下每一位的作用
- XA_ST
当设置为1时,X轴加速度计进行自检。 - YA_ST
当设置为1时,Y轴加速度计进行自检。 - ZA_ST
当设置为1时,Z轴加速度计进行自检。 - AFS_SEL
2位无符号值。选择加速度计的量程范围。
| AFS_SEL | 加速度计满量程范围 |
|---|---|
| 0 | ±2g |
| 1 | ±4g |
| 3 | ±8g |
| 4 | ±16g |
2.4 PWR_MGMT_2寄存器

此寄存器允许用户在仅加速计低功率模式下配置唤醒频率。这个寄存器还允许用户将加速度计和陀螺仪的各个轴进入待机模式。
- STBY_XA
当设置为1时,该位将使X轴加速度计进入待机模式。 - STBY_YA
当设置为1时,该位将使Y轴加速度计进入待机模式。 - STBY_ZA
当设置为1时,该位将使Z轴加速度计进入待机模式。 - STBY_XG
当设置为1时,此位将使X轴陀螺仪进入待机模式。 - STBY_YG
当设置为1时,该位将使Y轴陀螺仪进入待机模式。 - STBY_ZG
当设置为1时,此位将使Z轴陀螺仪进入待机模式。
三、程序设计
本次的程序设计使用的是STM32F103C8T6作主控,串口输出三轴角度信息。
3.1 I2C程序设计
MPU6050使用的是I2C通信,对于I2C这里不再作详细介绍,具体可以看博主STM32外设系列OLED中对I2C的介绍,这里直接给出程序设计
drv层.c文件
/**==============================================================================* 声明:本程序由CSDN博主“二土电子”编写整理,部分程序由外部参考借鉴。* 如需更多程序资源或STM32教程,可微信公众号搜索“二土电子”关注* STM32学习交流群:479667779,更多优质资源,等你来发现!* 2023.11.09 ---------------------------------------------------- code by ertu*==============================================================================
*/
#include "drv_mpu6050.h"
#include "delay.h"/**==============================================================================*函数名称:Drv_Mpu6050_Gpio_Init*函数功能:初始化MPU6050引脚*输入参数:无*返回值:无*备 注:这里不再给AD0另外接一个引脚,也就是从机地址固定为0X68*==============================================================================
*/
void Drv_Mpu6050_Gpio_Init (void)
{GPIO_InitTypeDef GPIO_InitStructure; // 定义结构体// 开启时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);// 配置结构体GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽式输出GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_SetBits(GPIOB,GPIO_Pin_6 | GPIO_Pin_7); // 拉高
}
/**==============================================================================*函数名称:MPU_IIC_Delay*函数功能:MPU6050 IIC延时*输入参数:无*返回值:无*备 注:无*==============================================================================
*/
void MPU_IIC_Delay (void)
{delay_us(2);
}
/**==============================================================================*函数名称:MPU_IIC_Start*函数功能:MPU6050 IIC发送起始信号*输入参数:无*返回值:无*备 注:无*==============================================================================
*/
void MPU_IIC_Start (void)
{MPU_SDA_OUT(); // SDA输出MPU_IIC_SDA = 1; MPU_IIC_SCL = 1;MPU_IIC_Delay();MPU_IIC_SDA = 0;MPU_IIC_Delay();MPU_IIC_SCL = 0;
}
/**==============================================================================*函数名称:MPU_IIC_Stop*函数功能:MPU6050 IIC发送终止信号*输入参数:无*返回值:无*备 注:无*==============================================================================
*/
void MPU_IIC_Stop (void)
{MPU_SDA_OUT(); // SDA输出MPU_IIC_SCL = 0;MPU_IIC_SDA = 0;MPU_IIC_Delay();MPU_IIC_SCL = 1; MPU_IIC_SDA = 1;MPU_IIC_Delay();
}
/**==============================================================================*函数名称:MPU_IIC_Wait_Ack*函数功能:MPU6050 IIC等待应答信号*输入参数:无*返回值:0:收到应答信号;1:未收到应答信号*备 注:无*==============================================================================
*/
u8 MPU_IIC_Wait_Ack (void)
{u8 ucErrTime = 0;MPU_SDA_IN(); // SDA输入MPU_IIC_SDA = 1;MPU_IIC_Delay(); MPU_IIC_SCL = 1;MPU_IIC_Delay();while(MPU_READ_SDA){ucErrTime++;if(ucErrTime>250){MPU_IIC_Stop();return 1;}}MPU_IIC_SCL = 0; // 时钟输出0 return 0;
}
/**==============================================================================*函数名称:MPU_IIC_Ack*函数功能:MPU6050 IIC发送应答信号*输入参数:无*返回值:无*备 注:无*==============================================================================
*/
void MPU_IIC_Ack (void)
{MPU_IIC_SCL = 0;MPU_SDA_OUT(); // SDA输出MPU_IIC_SDA = 0;MPU_IIC_Delay();MPU_IIC_SCL = 1;MPU_IIC_Delay();MPU_IIC_SCL = 0;
}
/**==============================================================================*函数名称:MPU_IIC_NAck*函数功能:MPU6050 IIC发送非应答信号*输入参数:无*返回值:无*备 注:无*==============================================================================
*/
void MPU_IIC_NAck (void)
{MPU_IIC_SCL = 0;MPU_SDA_OUT(); // SDA输出MPU_IIC_SDA = 1;MPU_IIC_Delay();MPU_IIC_SCL = 1;MPU_IIC_Delay();MPU_IIC_SCL = 0;
}
/**==============================================================================*函数名称:MPU_IIC_Send_Byte*函数功能:MPU6050 IIC发送一个字节*输入参数:无*返回值:txd:发送的字节*备 注:无*==============================================================================
*/
void MPU_IIC_Send_Byte (u8 txd)
{ u8 t;MPU_SDA_OUT(); // SDA输出MPU_IIC_SCL = 0; // 拉低时钟开始数据传输for(t = 0;t < 8;t ++){ MPU_IIC_SDA = (txd & 0x80) >> 7;txd <<= 1; MPU_IIC_SCL = 1;MPU_IIC_Delay(); MPU_IIC_SCL = 0; MPU_IIC_Delay();}
}
/**==============================================================================*函数名称:MPU_IIC_Read_Byte*函数功能:MPU6050 IIC读取一个字节*输入参数:ack = 1时,发送ACK;ack = 0时,发送NACK*返回值:接收到的一个自己数据*备 注:无*==============================================================================
*/
u8 MPU_IIC_Read_Byte (u8 ack)
{u8 i,receive = 0;MPU_SDA_IN(); // SDA输入for(i = 0;i < 8;i ++ ){MPU_IIC_SCL = 0; MPU_IIC_Delay();MPU_IIC_SCL = 1;receive <<= 1;if(MPU_READ_SDA){receive++;} MPU_IIC_Delay(); }if (!ack){MPU_IIC_NAck(); // 发送NACK}else{MPU_IIC_Ack(); // 发送ACK}return receive;
}
/**==============================================================================*函数名称:MPU_Write_Len*函数功能:IIC在固定地址开始连续写入数据*输入参数:addr:从设备地址;reg:寄存器地址;len:写入长度;*buf:要写入的数据地址*返回值:0:写入成功;1:写入失败*备 注:无*==============================================================================
*/
u8 MPU_Write_Len (u8 addr,u8 reg,u8 len,u8 *buf)
{u8 i; MPU_IIC_Start(); MPU_IIC_Send_Byte((addr << 1) | 0); // 发送器件地址+写命令 if(MPU_IIC_Wait_Ack()) // 等待应答{MPU_IIC_Stop(); return 1; }MPU_IIC_Send_Byte(reg); // 写寄存器地址MPU_IIC_Wait_Ack(); // 等待应答for(i = 0;i < len;i ++){MPU_IIC_Send_Byte(buf[i]); //发送数据if(MPU_IIC_Wait_Ack()) //等待ACK{MPU_IIC_Stop(); return 1; } } MPU_IIC_Stop(); return 0;
}
/**==============================================================================*函数名称:MPU_Read_Len*函数功能:IIC在固定地址开始连续读取数据*输入参数:addr:从设备地址;reg:寄存器地址;len:读取长度;*buf:要读取的数据存储地址*返回值:0:读取成功;1:读取失败*备 注:无*==============================================================================
*/
u8 MPU_Read_Len (u8 addr,u8 reg,u8 len,u8 *buf)
{ MPU_IIC_Start(); MPU_IIC_Send_Byte((addr << 1) | 0); // 发送器件地址+写命令 if(MPU_IIC_Wait_Ack()) // 等待应答{MPU_IIC_Stop(); return 1; }MPU_IIC_Send_Byte(reg); // 写寄存器地址MPU_IIC_Wait_Ack(); // 等待应答MPU_IIC_Start();MPU_IIC_Send_Byte((addr << 1) | 1); // 发送器件地址+读命令 MPU_IIC_Wait_Ack(); // 等待应答 while(len){if(len == 1)*buf = MPU_IIC_Read_Byte(0); // 读数据,发送nACK else *buf = MPU_IIC_Read_Byte(1); // 读数据,发送ACK len --;buf ++; } MPU_IIC_Stop(); // 产生一个停止条件 return 0;
}
/**==============================================================================*函数名称:MPU_Read_Len*函数功能:IIC在固定地址写入一字节数据*输入参数:reg:寄存器地址;data:数据;*返回值:0:写入成功;1:写入失败*备 注:无*==============================================================================
*/
u8 MPU_Write_Byte(u8 reg,u8 data)
{ MPU_IIC_Start(); MPU_IIC_Send_Byte((0X68 << 1) | 0); // 发送器件地址+写命令 if(MPU_IIC_Wait_Ack()) // 等待应答{MPU_IIC_Stop(); return 1; }MPU_IIC_Send_Byte(reg); // 写寄存器地址MPU_IIC_Wait_Ack(); // 等待应答 MPU_IIC_Send_Byte(data); // 发送数据if(MPU_IIC_Wait_Ack()) // 等待ACK{MPU_IIC_Stop(); return 1; } MPU_IIC_Stop(); return 0;
}
/**==============================================================================*函数名称:MPU_Read_Byte*函数功能:IIC在固定地址读取一字节数据*输入参数:reg:寄存器地址;*返回值:读取的数据*备 注:无*==============================================================================
*/
u8 MPU_Read_Byte (u8 reg)
{u8 res;MPU_IIC_Start(); MPU_IIC_Send_Byte((0X68 << 1) | 0); // 发送器件地址+写命令 MPU_IIC_Wait_Ack(); // 等待应答 MPU_IIC_Send_Byte(reg); // 写寄存器地址MPU_IIC_Wait_Ack(); // 等待应答MPU_IIC_Start();MPU_IIC_Send_Byte((0X68 << 1) | 1); // 发送器件地址+读命令 MPU_IIC_Wait_Ack(); // 等待应答 res=MPU_IIC_Read_Byte(0); // 读取数据,发送nACK MPU_IIC_Stop(); // 产生一个停止条件 return res;
}
//设置MPU6050的数字低通滤波器
//lpf:数字低通滤波频率(Hz)
//返回值:0,设置成功
// 其他,设置失败
/**==============================================================================*函数名称:Drv_Mpu6050_Set_Lpf*函数功能:设置MPU6050的数字低通滤波器*输入参数:lpf:数字低通滤波频率(Hz)*返回值:0:成功;1:失败*备 注:无*==============================================================================
*/
u8 Drv_Mpu6050_Set_Lpf (u16 lpf)
{u8 data = 0;if(lpf >= 188){data=1;}else if(lpf>=98){data=2;}else if(lpf>=42){data=3;}else if(lpf>=20){data=4;}else if(lpf>=10){data=5;}else{data=6;}return MPU_Write_Byte(MPU_CFG_REG,data); // 设置数字低通滤波器
}
/**==============================================================================*函数名称:Drv_Mpu6050_Set_Rate*函数功能:设置MPU6050的采样率(假定Fs=1KHz)*输入参数:rate:4~1000(Hz)*返回值:0:成功;1:失败*备 注:无*==============================================================================
*/
u8 Drv_Mpu6050_Set_Rate (u16 rate)
{u8 data;if(rate > 1000){rate=1000;}if(rate<4){rate=4;}data = 1000 / rate - 1;data = MPU_Write_Byte(MPU_SAMPLE_RATE_REG,data); // 设置数字低通滤波器return Drv_Mpu6050_Set_Lpf(rate / 2); // 自动设置LPF为采样率的一半
}drv层.h文件
#ifndef _DRV_MPU6050_H
#define _DRV_MPU6050_H#include "sys.h" // STM32库函数头文件// IIC引脚宏定义
#define MPU_IIC_SCL PBout(6) // SCL
#define MPU_IIC_SDA PBout(7) // SDA
#define MPU_READ_SDA PBin(7) // 输入SDA// SDA方向
#define MPU_SDA_IN() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28;}
#define MPU_SDA_OUT() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;}// MPU6050寄存器
#define MPU_SELF_TESTX_REG 0X0D //自检寄存器X
#define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y
#define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z
#define MPU_SELF_TESTA_REG 0X10 //自检寄存器A
#define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器
#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
#define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器
#define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器
#define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器
#define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器
#define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器
#define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器
#define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器
#define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器
#define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器
#define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器#define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器
#define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define MPU_INT_EN_REG 0X38 //中断使能寄存器
#define MPU_INT_STA_REG 0X3A //中断状态寄存器#define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器
#define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器
#define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器
#define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器
#define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器
#define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器#define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器
#define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器#define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器#define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器
#define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器
#define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器
#define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器#define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器
#define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器
#define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器
#define MPU_USER_CTRL_REG 0X6A //用户控制寄存器
#define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1
#define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位
#define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位
#define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器
#define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器void Drv_Mpu6050_Gpio_Init (void); // 初始化MPU6050引脚
void MPU_IIC_Delay (void); // MPU6050 IIC延时
void MPU_IIC_Start (void); // MPU6050 IIC发送起始信号
void MPU_IIC_Stop (void); // MPU6050 IIC发送终止信号
u8 MPU_IIC_Wait_Ack (void); // MPU6050 IIC等待应答信号
void MPU_IIC_Ack (void); // MPU6050 IIC发送应答信号
void MPU_IIC_NAck (void); // MPU6050 IIC发送非应答信号
void MPU_IIC_Send_Byte (u8 txd); // MPU6050 IIC发送一个字节
u8 MPU_IIC_Read_Byte (u8 ack); // MPU6050 IIC读取一个字节
u8 MPU_Write_Len (u8 addr,u8 reg,u8 len,u8 *buf); // IIC在固定地址开始连续写入数据
u8 MPU_Read_Len (u8 addr,u8 reg,u8 len,u8 *buf); // IIC在固定地址开始连续读取数据
u8 MPU_Write_Byte(u8 reg,u8 data); // IIC在固定地址写入一字节数据
u8 MPU_Read_Byte (u8 reg); // IIC在固定地址读取一字节数据
u8 Drv_Mpu6050_Set_Lpf (u16 lpf); // 设置MPU6050的数字低通滤波器
u8 Drv_Mpu6050_Set_Rate (u16 rate); // 设置MPU6050的采样率(假定Fs=1KHz)#endif3.2 MPU6050初始化程序
MPU6050初始化程序如下
/**==============================================================================*函数名称:Drv_Mpu6050_Gpio_Init*函数功能:初始化MPU6050*输入参数:无*返回值:0:初始化成功;1:初始化失败;*备 注:这里不再给AD0另外接一个引脚,也就是从机地址固定为0X68*==============================================================================
*/
u8 Med_Mpu6050_Init (void)
{u8 mpu6050Id = 0; // 存储读取的ID(从设备地址)Drv_Mpu6050_Gpio_Init(); // 初始化GPIOMPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); // 复位MPU6050delay_ms(100);MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); // 唤醒MPU6050MPU_Write_Byte(MPU_GYRO_CFG_REG,3 << 3); // 设置陀螺仪满量程范围0:±250°/s;1:±500°/s;2:±1000°/s;3:±2000°/sMPU_Write_Byte(MPU_ACCEL_CFG_REG,0 << 3); // 设置加速度传感器满量程范围0:±2g;1:±4g;2:±8g;3:±16gDrv_Mpu6050_Set_Rate(50); // 设置采样率50HzMPU_Write_Byte(MPU_INT_EN_REG,0X00); // 关闭所有中断MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); // I2C主模式关闭MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); // 关闭FIFOMPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); // INT引脚低电平有效mpu6050Id = MPU_Read_Byte(MPU_DEVICE_ID_REG);if(mpu6050Id == 0X68) // 器件ID正确{MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); // 设置CLKSEL,PLL X轴为参考MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); // 加速度与陀螺仪都工作Drv_Mpu6050_Set_Rate(50); // 设置采样率为50Hz}else{return 1;}return 0;
}
上面的程序是MPU6050初始化函数设计,我们在进行函数设计时加入了一个返回值,如果我们获取到的MPU6050的从机地址是正确的,就返回0,说明MPU6050连接正常,否则说明MPU6050异常。当MPU6050异常时,我们最好设置一个超时检测,防止我们在初始化的时候一直卡在这里。具体的初始化程序设计如下
u8 watCunt = 0; // 超时间检测计数变量//初始化MPU6050printf ("MPU6050 Init");while (Med_Mpu6050_Init()){printf (".");delay_ms(200);watCunt = watCunt + 1;// 超时跳出if (watCunt >= 150){printf ("\r\n");printf ("DMP Error!\r\n");break;}}printf ("\r\n");printf ("MPU6050 Init OK!\r\n");
3.3 DMP相关程序
DMP相关程序我们直接使用大家常见的例程中的一些文件,不再进行介绍。
在初始化DMP时我们也设置一个超时检测,具体程序设计如下
u8 watCunt = 0; // 超时间检测计数变量// 初始化DMPprintf ("DMP Init");while(mpu_dmp_init()){printf (".");delay_ms(200);watCunt = watCunt + 1;// 超时跳出if (watCunt >= 150){printf ("\r\n");printf ("MPU6050 Connect Error!\r\n");break;}}printf ("\r\n");printf ("DMP Init OK!\r\n");
3.4 获取三轴角度信息
最后我们在main函数中获取三轴角度,串口打印输出
int main(void)
{float pitch,roll,yaw; // 欧拉角Med_Mcu_Iint(); // 系统初始化while(1){if(mpu_dmp_get_data(&pitch,&roll,&yaw) == 0){ printf("Pitch:%.1f Roll:%.1f Yaw:%.1f\r\n",pitch,roll,yaw);}delay_ms(100);}
}
四、实现效果
下面我们来看一下具体的效果

相关文章:
STM32外设系列—MPU6050角度传感器
🎀 文章作者:二土电子 🌸 关注公众号获取更多资料! 🐸 期待大家一起学习交流! 文章目录 一、MPU6050简介二、MPU6050寄存器简介2.1 PWR_MGMT_1寄存器2.2 GYRO_CONFIG寄存器2.3 ACCEL_CONFIG寄存器2.4 PW…...
网站小程序分类目录网源码系统+会员登录注册功能 带完整搭建教程
大家好啊,源码小编今天来给大家分享一款网站小程序分类目录网源码系统会员登录注册功能 。 以下是核心代码图模块: 系统特色功能一览: 分类目录:系统按照不同的类别对网站进行分类,方便用户查找自己需要的网站。用户可…...
【Linux网络】手把手实操Linux系统网络服务DHCP
目录 一、什么是dhcp 二、详解dhcp的工作原理 三、dhcp的实操 第一步:3台机器的防火墙和安全机制都需要关闭!!! 第二步:Linux下载dhcp软件,并查看配置文件位置 第三步:读配置文件…...

Huggingface网页解析和下载爬虫
解析网页: import requests from bs4 import BeautifulSoup# 目标网页URL url https://huggingface.co/internlm/internlm-20b/tree/main# 发送GET请求 response requests.get(url)# 检查请求是否成功 if response.status_code 200:# 使用BeautifulSoup解析HTML…...

C# Winform 自定义带SWITCH的卡片
1、创建卡片用户控件 在控件库中添加用户控件(Windows窗体),命名为Card; 在属性/布局栏设置Size为148,128. 2、修改Card.cs using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; u…...

我用Devchat开发了公务员报名确认系统自动登录脚本,再也不用担心挤不进去了
#AI编程助手哪家好?DevChat“真”好用 # 演示效果 我用Devchat开发了公务员报名确认系统自动登录,再也不用担心挤不进去了 目录 演示效果前言粉丝独家专属红包码DevChat是什么?DevChat AI编程助手有哪些优势一、安装Vscode1、下载vscode链接…...
如何低门槛开发有趣实用的ZigBee产品?
一、什么是 Zigbee 协议? Zigbee 技术是一种连接距离短、功耗低、复杂程度低、数据传输量低的无线通信技术,其命名灵感源自于蜜蜂在群体中的信息传输。它主要通过网关与互联网进行通信,并嵌入各种智能设备,最终实现自动控制和远程…...

ChatGPT和API发生重大中断!
11月9日凌晨,OpenAI在官网发布,ChatGPT和API发生重大中断,导致全球所有用户无法正常使用,宕机时间超过2小时。 目前,OpenAI已经找到问题所在并进行了修复,但仍然不稳定,会继续进行安全监控。 …...
SQL第五次上机实验
1.向图书表(Book)插入以下记录 USE TSGL GO INSERT INTO Book VALUES(7-5402-1800-3,文学类,边城,沈从文,燕山出版社,10,5,5)2.向借阅表插入以下两条记录 USE TSGL GO INSERT INTO Lend VALUES(201207034201,7-5402-1800-3,00366240,2013-04-22),(2012…...
Matplotlib数据可视化综合应用Matplotlib图形配置在线闯关_头歌实践教学平台
Matplotlib数据可视化综合应用图形配置 第1关 配置颜色条第2关 设置注释第3关 自定义坐标刻度第4关 配置文件与样式表 第1关 配置颜色条 任务描述 本关任务:使用colorbar绘制一个热成像图。 编程要求 在右侧编辑器Begin-End处补充代码,根据输入数据绘制…...

CSS实现瀑布流的两种方式
column 多行布局实现瀑布流 1.column 实现瀑布流主要依赖两个属性。 2.column-count 属性,是控制屏幕分为多少列。 3.column-gap 属性,是控制列与列之间的距离。 <!DOCTYPE html> <html lang"en"> <head><meta charset&q…...

Hadoop 视频分析系统
视频分析系统 业务流程 原始数据 vedio.json {"rank":1,"title":"《逃出大英博物馆》第二集","dzl":"77.8","bfl":"523.9","zfl":"39000","type":"影视",&quo…...
Flutter android和ios闪屏页配置
一.概念理解 闪屏页 1.当点击app开始的一瞬间,所呈现出来的页面就是闪屏页。 2.为什么会有闪屏也,由于app启动需要加载代码,这个过程需要耗时,在没有加载完成之前,是看不到app真正的页面。所以app在没有完全加载完时…...

30道高频Vue面试题快问快答
※其他的快问快答,看这里! 10道高频Qiankun微前端面试题快问快答 10道高频webpack面试题快问快答 20道高频CSS面试题快问快答 20道高频JavaScript面试题快问快答 30道高频Vue面试题快问快答 面试中的快问快答 快问快答的情景在面试中非常常见。 在面试过…...

vue-前端实现模糊查询
vue-前端实现模糊查询 开始觉得前端的模糊查询肯定是非常难实现的,但后来发现还是很容易的,几行代码就可以搞定。 原理 从后端获取到所有数据后,将数据存储于两个变量中,目的是为了其中一个作为模糊查询的对照组,用…...

QT:tcpSocket 报错The proxy type is invalid for this operation
调用connectToHost时会先检查代理情况。Qt 程序默认使用系统的代理设置会导致这个问题导致,只要关闭系统的代理设置就可以解决这个问题: (1)添加头文件: #include <QNetworkProxy> (2)添加…...

PostgreSQL 技术内幕(十一)位图扫描
扫描算子在上层计算和底层存储之间,向下扫描底层存储的数据,向上作为计算的输入源,在SQL的执行层中,起着关键的作用。顺序、索引、位图等不同类型的扫描算子适配不同的数据分布场景。然而,扫描算子背后的实现原理是怎样…...

C# WebSocket 服务器
*******************websocket服务器************************************** 第一步:创建HttpListener类,并启动监听: var listener new HttpListener(); listener.Prefixes.Add("http://10.10.13.140:8080/"); …...
自动化实战 - 测试个人博客系统
前言 本篇使用Selenium3Junit5对个人博客进行自动化测试,如有错误,请在评论区指正,让我们一起交流,共同进步! 文章目录 前言一.web自动化测试用例二.测试准备1.注册界面自动化测试测试过程中遇到的Bug: 2.登录界面自动…...
TCP/IP详解
TCP/IP详解 一、网络基础1.TCP/IP网络分层2.IP地址和端口号3.封装与分用4.客户-服务端模型 二、链路层1.以太网IEEE802封装2.环回接口 Loopback Interface3.最大传输单元MTU和路径MTU 三、网络层 - IP1.IP首部的关键信息2.IP路由选择3.子网寻址和子网掩码4.ICMP和IGMP 四、传输…...
)
Elasticsearch实用技巧:列出集群所有索引的5种方法(最全命令+图解)
Elasticsearch实用技巧:列出集群所有索引的5种方法(最全命令图解)一、前言二、核心说明:查看索引的通用规则三、索引查看整体流程四、方法1:最常用 —— 查看所有索引(带表头,推荐)4…...
怎么选?手把手教你根据Ubuntu/CentOS系统做决定)
SuperMap iServer三种Linux安装包(tar/deb/rpm)怎么选?手把手教你根据Ubuntu/CentOS系统做决定
SuperMap iServer三种Linux安装包深度选择指南:从系统适配到实战决策 当你第一次在Linux系统上部署SuperMap iServer时,面对tar、deb、rpm三种安装包格式,是否感到无从下手?这就像面对同一款产品的三个不同包装——它们核心功能相…...

STM32F4串口接收ATGM336H GPS数据,手把手教你解析NMEA协议并转换经纬度格式
STM32F4与ATGM336H GPS模块实战:从硬件连接到NMEA协议解析 当你第一次拿到ATGM336H GPS模块和STM32F4开发板时,可能会对如何获取准确的经纬度数据感到困惑。本文将带你从硬件连接到软件解析,一步步实现GPS数据的完整处理流程。不同于简单的数…...

别急着改java.security!排查JDBC连SQL Server报TLS错误的3个更优思路
别急着改java.security!排查JDBC连SQL Server报TLS错误的3个更优思路 当你在使用JDBC连接SQL Server时遇到"The server selected protocol version TLS10 is not accepted by client preferences"的错误,大多数技术文章会直接建议你修改java.s…...

别再乱用disable fork了!手把手教你用guard_fork精准控制SystemVerilog线程
精准掌控SystemVerilog线程:guard_fork防御性编程实践 在验证环境开发中,多线程控制是每个工程师必须面对的挑战。想象一下这样的场景:你的monitor正在后台持续采集数据,而某个测试用例触发了超时机制,直接使用disable…...

华为SDH传输设备时钟配置避坑指南:从单BITS到主备BITS的实战配置详解
华为SDH传输设备时钟配置实战:从基础原理到复杂组网避坑指南 时钟同步是SDH传输网络的命脉,一次错误的配置可能导致全网时钟互锁、业务闪断甚至级联故障。记得去年某运营商骨干网就因时钟ID分配冲突引发全网时钟振荡,故障定位耗时超过72小时。…...

超级结MOSFET功率回路PCB优化设计
Q1:超级结 MOSFET 功率回路包含哪些部分?为何是 PCB 优化的重中之重?SJ-MOSFET 功率回路是承载主功率电流的核心路径,不同拓扑结构略有差异:在 Buck/Boost 拓扑中,为输入母线电容→MOSFET 漏极→MOSFET 源极…...

Vitis 2020.1 里 MicroBlaze 程序编译失败?别急着找处理器,先看看你的 BRAM 够不够用
Vitis 2020.1中MicroBlaze程序编译失败的深度排查指南 当你满怀期待地点击Vitis中的"Run"按钮,却突然弹出一条"找不到microblaze_0"的警告时,千万别急着怀疑人生。这种看似处理器配置错误的表象下,往往隐藏着一个更本质的…...
)
告别踩坑!Windows 10/11 保姆级安装SQL Server 2012全流程(附常见报错解决方案)
Windows 10/11 实战指南:SQL Server 2012 完美安装与深度排错 在数字化转型浪潮中,数据库技术依然是企业信息系统的核心支柱。尽管SQL Server 2012已不是最新版本,但仍有大量传统系统依赖这一经典平台。本文将带您穿越时空隧道,在…...

FPGA网络协议栈入门:从零开始,用Xilinx K7325t开发板实现一个支持DHCP和Ping的10G以太网节点
FPGA网络协议栈实战:基于Xilinx K7325t的10G以太网节点开发指南 引言 在当今高速网络通信领域,FPGA凭借其并行处理能力和低延迟特性,正成为构建高性能网络协议栈的理想平台。本文将带领读者从零开始,使用Xilinx K7325t开发板实现一…...