Python Opencv实践 - 车牌定位(纯练手,存在失败场景,可以继续优化)
使用传统的计算机视觉方法定位图像中的车牌,参考了部分网上的文章,实际定位效果对于我目前使用的网上的图片来说还可以。实测发现对于车身本身是蓝色、或是车牌本身上方有明显边缘的情况这类图片定位效果较差。纯练手项目,仅供参考。代码中imagePreProcess对某些图片定位率相比于imagePreProcess2做预处理的效果要好。后续可以尝试做一个如果imagePreProcess2识别无效后使用imagePreProcess再处理,或者加上阈值自适应打分的机制优化。目前对于我做的练手项目来说足够了。
注意:以下代码是参考了网上的一些文章后,按照自己的思路写的,定位效果尚可。参考的文章有:python-opencv实战:车牌识别(一):精度还不错的车牌定位_基于阈值分割的车牌定位识别-CSDN博客
https://www.cnblogs.com/fyunaru/p/12083856.html
import cv2 as cv
import numpy as np
import matplotlib.pyplot as plt#过滤矩形的参数
minRectW = 100
minRectH = 50
#判断车牌颜色的参数
#一般情况下,蓝色车牌H分量的值通常都在115附近徘徊
# S分量和V分量因光照不同而差异较大(opencv中H分量的取值范围是0到179,而不是图像学中的0到360;S分量和V分量的取值范围是到255)
deltaH = 15
hsvLower = np.array([115 - deltaH,60,60])
hsvUpper = np.array([115 + deltaH,255,255])#灰度拉伸
def grayScaleStretch(img):maxGray = float(img.max())minGray = float(img.min())for i in range(img.shape[0]):for j in range(img.shape[1]):img[i,j] = 255 / (maxGray - minGray) * (img[i,j] - minGray)return img#图像二值化
def image2Binary(img):#选取灰度最大最小值的中间值maxGray = float(img.max())minGray = float(img.min())threshold = (minGray + maxGray) / 2ret,bin = cv.threshold(img, threshold, 255, cv.THRESH_BINARY)return bin#图像预处理
def imagePreProcess(img):#转换为灰度图imgGray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)#灰度拉伸imgGray = grayScaleStretch(imgGray)#plt.imshow(imgGray, cmap='gray')kernel = cv.getStructuringElement(cv.MORPH_ELLIPSE, (3,3))#做开运算imgOpen = cv.morphologyEx(imgGray, cv.MORPH_OPEN, kernel)#plt.imshow(imgOpen, cmap='gray')#获得差分图imgDiff = cv.absdiff(imgGray, imgOpen)#plt.imshow(imgDiff, cmap='gray')imgDiff = cv.GaussianBlur(imgDiff, (3,3), 5)#plt.imshow(imgDiff, cmap='gray')#图像二值化imgBinary = image2Binary(imgDiff)#plt.imshow(imgBinary, cmap='gray')cannyEdges = cv.Canny(imgBinary, 127, 200)#plt.imshow(cannyEdges, cmap='gray')#对Canny检测边缘结果做处理kernel = np.ones((3,3), np.uint8)imgOut = cv.morphologyEx(cannyEdges, cv.MORPH_CLOSE, kernel)imgOut = cv.dilate(imgOut, kernel, iterations=1)imgOut = cv.morphologyEx(imgOut, cv.MORPH_OPEN, kernel)#imgOut = cv.erode(imgOut, kernel, iterations=1)imgOut = cv.morphologyEx(imgOut, cv.MORPH_CLOSE, kernel)#plt.imshow(imgOut, cmap='gray')return imgOut#图像预处理2 - 对于某些
def imagePreProcess2(img):imgGray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)#灰度拉伸imgGray = grayScaleStretch(imgGray)imgGray = cv.GaussianBlur(imgGray, (3,3), 5)#进行边缘检测cannyEdges = cv.Canny(imgGray, 180, 230)#二值化imgBinary = image2Binary(cannyEdges)#plt.imshow(imgBinary, cmap='gray')#先做闭运算再做开运算kernel = np.ones((3,3), np.uint8)imgOut = cv.morphologyEx(imgBinary, cv.MORPH_CLOSE, kernel)imgOut = cv.morphologyEx(imgOut, cv.MORPH_OPEN, kernel)imgOut = cv.absdiff(imgBinary, imgOut)imgOut = cv.morphologyEx(imgOut, cv.MORPH_CLOSE, kernel)imgOut = cv.dilate(imgOut, kernel, iterations=1)plt.imshow(imgOut, cmap='gray')return imgOut#debug
def printHSV(hsvSrc):for i in range(hsvSrc.shape[0]):for j in range(hsvSrc.shape[1]):(h,s,v) = hsvSrc[i][j]print(h,s,v)#定位车牌
def locate_plate(imgProcessing, imgOriginal):contours,hierarchy = cv.findContours(imgProcessing, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)carPlateCandidates = []for contour in contours:(x,y,w,h) = cv.boundingRect(contour)#过滤掉一些小的矩形if (w < minRectW or h < minRectH):continue#cv.rectangle(imgOriginal, (int(x), int(y)), (int(x + w),int(y + h)), (0,255,0), 2)carPlateCandidates.append([int(x),int(y),int(x + w),int(y + h)])#plt.imshow(imgOriginal[:,:,::-1])maxMean = 0target = []target_mask = []#依次检查候选车牌列表,用HSV颜色空间判别是否是车牌for candidate in carPlateCandidates:(x0,y0,x1,y1) = candidatecandidateROI = imgOriginal[y0:y1,x0:x1]hsvROI = cv.cvtColor(candidateROI, cv.COLOR_BGR2HSV)mask = cv.inRange(hsvROI, hsvLower, hsvUpper)#print(mask)#plt.imshow(mask, cmap='gray')#使用均值找出蓝色最多的区域mean = cv.mean(mask)#print(mean)if mean[0] > maxMean:maxMean = mean[0]target = candidatetarget_mask = mask#对target的范围进行缩小,找出蓝色刚开始和结束的坐标print(target_mask)nonZeroPoints = cv.findNonZero(target_mask)#print(nonZeroPoints)sortByX = np.sort(nonZeroPoints, axis=0)xMin = sortByX[0][0][0]xMax = sortByX[-1][0][0]print(sortByX)sortByY = np.sort(nonZeroPoints, axis=1)yMin = sortByY[0][0][1]yMax = sortByY[-1][0][1]print(sortByY)print("X min:" + str(xMin) + " X max:" + str(xMax) + " Y min:" + str(yMin) + " Y max:" + str(yMax))(x0,y0,x1,y1) = targetprint("Original:" + str(x0) + "," + str(y0) + "," + str(x1) + "," + str(y1))#target = (x0 + xMin, y0 + yMin, x0 + (xMax - xMin), y0 + yMax - yMin)target = [x0 + xMin, y0 + yMin, x0 + xMax, y0 + yMax]return target#读取图像
imgCarPlate = cv.imread("../../SampleImages/carplate/carplate_chongqing.jpg", cv.IMREAD_COLOR)
#plt.imshow(imgCarPlate[:,:,::-1])
img4locate = imagePreProcess2(imgCarPlate)
target = locate_plate(img4locate, imgCarPlate)
(x0,y0,x1,y1) = target
cv.rectangle(imgCarPlate, (x0,y0), (x1,y1), (0,255,0), 2)
plt.imshow(imgCarPlate[:,:,::-1])成功的例子:





不太成功的例子(轮廓检测的不太好,并且轮廓中蓝色的值过早出现,可以优化判断为连续的蓝色而不是零散的蓝色)

失败的例子(没能检测出小轮廓,车身本身为蓝色,替换为imagePreProcess后能够成功):

相关文章:
Python Opencv实践 - 车牌定位(纯练手,存在失败场景,可以继续优化)
使用传统的计算机视觉方法定位图像中的车牌,参考了部分网上的文章,实际定位效果对于我目前使用的网上的图片来说还可以。实测发现对于车身本身是蓝色、或是车牌本身上方有明显边缘的情况这类图片定位效果较差。纯练手项目,仅供参考。代码中im…...

U盘插在电脑上显示要格式化磁盘怎么办
U盘是一种便携式存储设备,广泛应用于各种场合。然而,有时候我们可能会遇到一些问题,比如将U盘插入电脑后显示要格式化磁盘,这通常意味着U盘的分区出现了问题或者U盘的文件系统已经损坏。这种情况下,我们应该如何解决呢…...
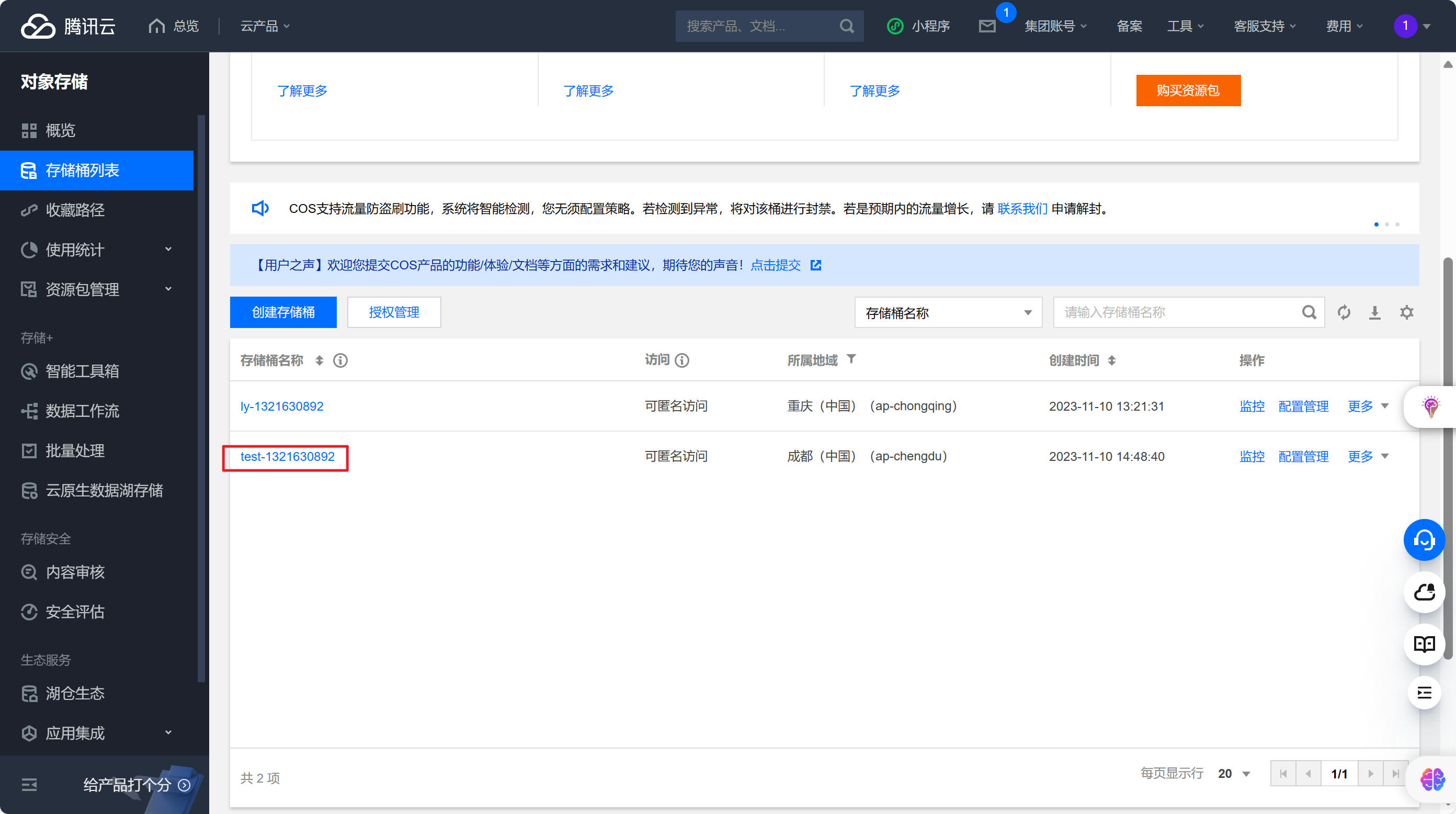
Python使用腾讯云SDK实现对象存储(上传文件、创建桶)
文章目录 1. 开通服务2. 创建存储桶3. 手动上传文件并查看4. python上传文件4.1 找到sdk文档4.2 初始化代码4.3 region获取4.4 secret_id和secret_key获取4.5 上传对象代码4.6 python实现上传文件 5 python创建桶 首先来到腾讯云官网 https://cloud.tencent.com/1. 开通服务 来…...

Springboot整合Jedis实现单机版或哨兵版可切换配置
Springboot整合Jedis实现单机版或哨兵版可切换配置 前言实现最后 前言 前文写到借助redis实现Shiro实现session限制登录数量踢人下线,本文就写一下Jedis的配置,可切换单机版和集群哨兵版,方便开发测试。 实现 很简单,直接上代码&…...

lenovo联想小新 Air-14 2019 AMD平台API版(81NJ)原装出厂Windows10系统
下载链接:https://pan.baidu.com/s/1HCC66EH4UOcgofRx5_v1oA?pwdlgqw 提取码:lgqw 原厂系统自带所有驱动、出厂主题壁纸、系统属性专属LOGO标志、Office办公软件、联想电脑管家等预装程序 所需要工具:16G或以上的U盘 文件格式…...
特殊矩阵的压缩存储(对称矩阵,三角矩阵,三对角矩阵,稀疏矩阵)
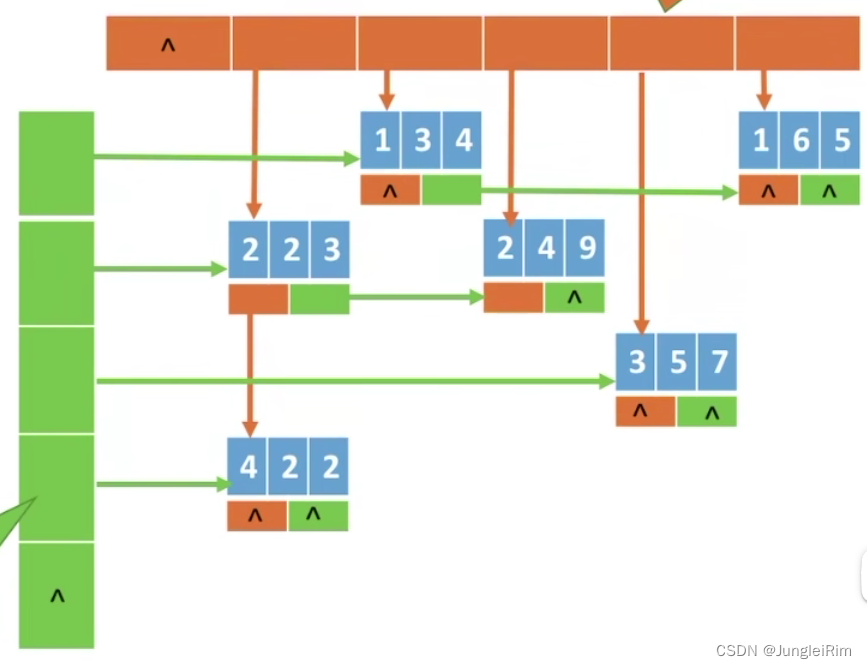
目录 1.数组的存储结构1.—维数组2.二维数组1.行优先存储2.列优先存储 2.特殊矩阵1.对称矩阵1.行优先存储 2.三角矩阵1.上三角矩阵2.下三角矩阵 3.三对角矩阵(带状矩阵)4.稀疏矩阵 1.数组的存储结构 1.—维数组 各数组元素大小相同,且物理上…...

DDU框架学习之路
目录 MVVM对比 DDU 数据消费者UI 数据的转换者:Domain Layer 数据图生产者/提供者 DataLayer 遵循原理: 单一数据流: Android官方推荐架构:DDU MVVM对比 M:Model 网络层 用于获取远端数据 VM:ViewModel 中间转…...
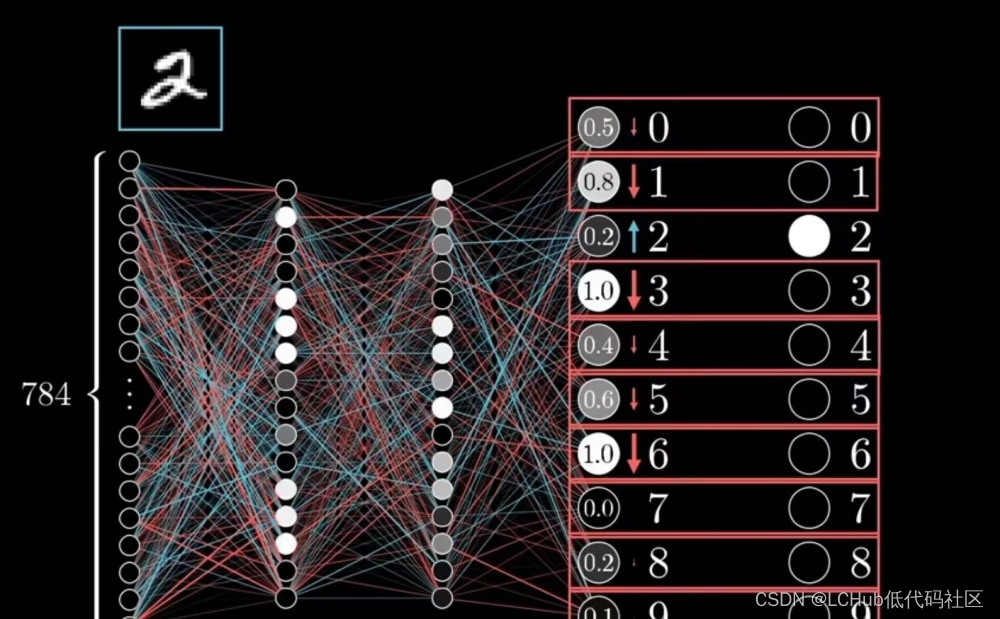
进阶课6——基于Seq2Seq的开放域生成型聊天机器人的设计和开发流程
情感聊天机器人通常属于开放领域,用户可以与机器人进行各种话题的互动。例如,微软小冰和早期的AnswerBus就是这种类型的聊天机器人。基于检索的开放领域聊天机器人需要大量的语料数据,其开发流程与基于任务型的聊天机器人相似,而基…...

Java面试题04
1.Array 和 ArrayList 有何区别? Array是固定长度的,元素类型可以是基本类型,创建后大小不可改变;ArrayList是可变长 度的,只能存储对象,可以动态添加和删除元素。 区别1: 存储类型不同 …...

海康Visionmaster-通讯管理:使用 Modbus TCP 通讯 协议与流程交互
使用 Modbus TCP 通讯协议与视觉通讯,当地址为 0000 的保持型寄存器(4x 寄存器)变为 1 时,触发视觉流程执行一次,同时视觉将地址为 0000 的寄存器复位(也即写为 0),视觉流程执行完成后,将结果数…...

assimp中如何判断矩阵是否是单位矩阵
对于一个矩阵元素为浮点型的矩阵,你是否还在使每个元素跟1.0f或0.0f进行比较,如果这样,只能说你的结果不一定正确,那我们看看assimp中是如何做的。 template <typename TReal> AI_FORCE_INLINE bool aiMatrix4x4t<TReal…...

大数据Doris(二十):数据导入(Broker Load)介绍
文章目录 数据导入(Broker Load)介绍 一、适用场景...

Docker快速安装kafka
创建zk docker run -d --name zookeeper-server \-e ALLOW_ANONYMOUS_LOGINyes \bitnami/zookeeper:latest创建kafka docker run -d --name kafka-server \-p 9092:9092 \-e ALLOW_PLAINTEXT_LISTENERyes \-e KAFKA_CFG_ZOOKEEPER_CONNECTzookeeper-server:2181 \-e KAFKA_CF…...
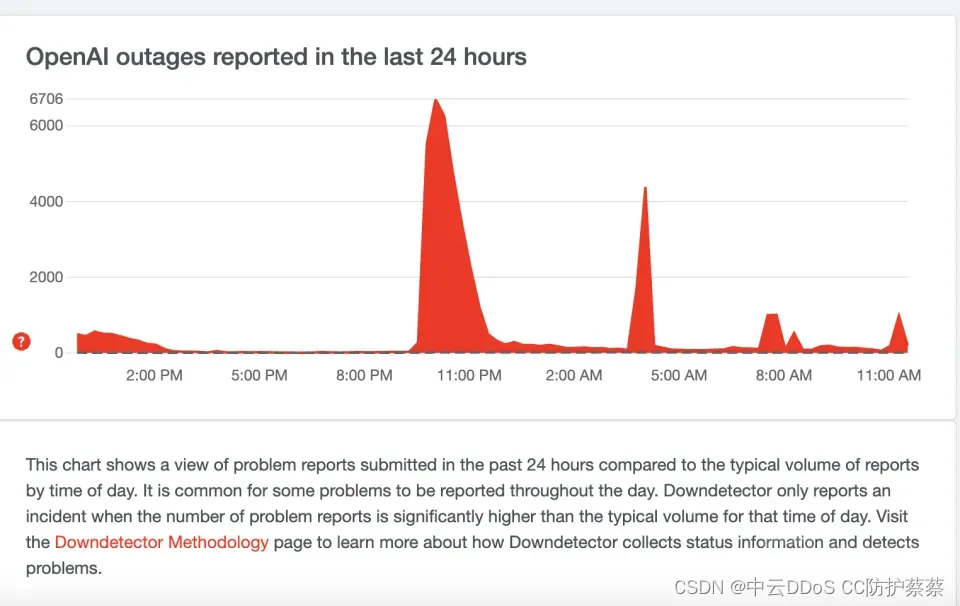
ChatGPT是什么?黑客试图淹没其服务
上线2个月,月活跃用户破亿,媒体人用它编辑文案,学生用它写作业,程序员用它编辑代码, 它是谁呢? 它就是火爆全网(chatgpt),chatgpt是什么呢,chatgpt是美国研发的一款人工…...

【Java 进阶篇】Java Web 开发之 Listener 篇:ServletContextListener 使用详解
欢迎大家来到 Java Web 开发的学习之旅!在前面的博客中,我们已经学习了 Servlet、JSP、Filter 等重要的概念和技术。今天,我们将深入探讨 Java Web 开发中另一个重要的组成部分——Listener(监听器),具体来…...

[C/C++]数据结构 链表OJ题:环形链表(如何判断链表是否有环)
题目描述: 给你一个链表的头节点 head ,判断链表中是否有环。 如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。 为了表示给定链表中的环,评测系统内部使用整数 pos 来表示链表尾连接到链表中的位置&…...

c#流程控制
c#分支语句 namespace ConsoleApp1 {internal class Program{static void Main(string[] args){Console.WriteLine("请输入学生成绩");string sConsole.ReadLine();int aint.Parse(s);//将字符类型强制转换为int类型if (a > 90){ Console.WriteLine("成绩优…...

基于SSM的学生二手书籍交易平台的设计与实现
末尾获取源码 开发语言:Java Java开发工具:JDK1.8 后端框架:SSM 前端:Vue 数据库:MySQL5.7和Navicat管理工具结合 服务器:Tomcat8.5 开发软件:IDEA / Eclipse 是否Maven项目:是 目录…...

xcode-工程设置
build settings Deployment Postprocessing 用于指定是否在构建完成后进行一些部署相关的处理。 当你在 Xcode 中构建你的应用程序时,构建设置决定了一些行为,其中一项是是否启用 Deployment Postprocessing。这个选项的主要作用是在构建完成后&#…...
Milvus Cloud——LLM Agent 现阶段出现的问题
LLM Agent 现阶段出现的问题 由于一些 LLM(GPT-4)带来了惊人的自然语言理解和生成能力,并且能处理非常复杂的任务,一度让 LLM Agent 成为满足人们对科幻电影所有憧憬的最终答案。但是在实际使用过程中,大家逐渐发现了通…...

前端像素UI库!前端复古风选型必看!像素UI 、精简复古风UI 。
一、像素风 复古风(8-bit/街机游戏/精简粗犷主义) 1. NES.css(8-bit 像素/红白机风) 官方文档(官网) :https://nostalgic-css.github.io/NES.css/ GitHub:https://github.com/no…...

手写一个最小 Starter:从 0 到能看懂
一、我们先定目标 我们做一个最简单的 starter,名字叫: ark-hello-starter 功能非常简单: 用户只要引入这个 starter,就能直接注入一个 HelloService 来调用。 像这样: Autowired private HelloService helloServic…...
)
Spring Boot 条件装配入门:一文搞懂 @ConditionalOnClass(附实战)
tips: Spring Boot 核心机制之 Conditional:从原理到实战(一次讲透) 一、前言 在使用 Spring Boot 的过程中,你可能会看到这样的注解: ConditionalOnClass 很多人第一次看到它,会有几个疑问&am…...
)
计算机毕业设计 | vue+SpringBoot凌云在线阅读平台 图书借阅管理系统(附源码)
1, 概述 1.1 课题背景 随着现在科学技术的进步,人类社会正逐渐走向信息化,图书馆拥有丰富的文献信息资源,是社会系统的重要组成部分,在信息社会中作用越来越重要,在我国图书馆计算机等 信息技术的应用起步…...

学Simulink——基于Simulink的轴向磁通电机多物理场耦合仿真
目录 手把手教你学Simulink——基于Simulink的轴向磁通电机多物理场耦合仿真 摘要 一、背景与挑战 1.1 为什么轴向磁通电机的仿真让人“头秃”? 1.2 核心痛点与设计目标 二、系统架构与核心控制推导 2.1 整体架构:跨越维度的“降阶打击” 2.2 核心数学推…...

AGI如何7×24小时守护长江生态?:基于卫星+IoT+多模态大模型的污染溯源实战框架
第一章:AGI驱动的长江生态全天候守护范式 2026奇点智能技术大会(https://ml-summit.org) 传统生态监测依赖人工巡检与离散传感器网络,难以应对长江流域跨省域、多尺度、强动态的水文—生物—人类活动耦合挑战。AGI驱动的守护范式通过具身感知、因果推理…...

波尔原子模型:一场思想与勇气的科学冒险
1. 从剑桥到曼彻斯特:一场科学家的自我救赎 1911年的秋天,25岁的尼尔斯波尔怀揣着对物理学的满腔热忱来到剑桥大学。这位来自丹麦的年轻人站在剑桥古老的校门前,望着"剑桥大学"几个庄严的字母,内心充满了对未来的憧憬。…...
利用PlantUML插件高效绘制UML时序图)
VSCODE 系列(七)利用PlantUML插件高效绘制UML时序图
1. 为什么选择PlantUML绘制时序图? 作为一名常年和微服务架构打交道的后端工程师,我经历过太多"画图5分钟,排版2小时"的痛苦。传统的绘图工具往往需要反复拖拽调整箭头位置,而PlantUML用代码生成图形的特性完美解决了这…...

终极免费PCB查看器:从零开始掌握OpenBoardView的完整指南
终极免费PCB查看器:从零开始掌握OpenBoardView的完整指南 【免费下载链接】OpenBoardView View .brd files 项目地址: https://gitcode.com/gh_mirrors/op/OpenBoardView 你是否曾经面对复杂的电路板文件感到无从下手?或者为了查看一个简单的.brd…...

2026届毕业生推荐的六大AI辅助论文方案解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 人工智能技术已然极为深入广泛地融入到了高等教育的场景之中,于毕业论文写作的整…...