ASAM OpenDRIVE V1.7协议超详解(一)
文章目录
- 前言
- 一、仿真场景的构成
- 二、openDRIVE框架
- 三、g_additionalData
- 四、openDRIVE-header
- 五、openDRIVE-road
- 1、Road总拓扑结构
- 2、Road-link介绍
- 1)link的拓扑结构
- 2)link链接示例
- 3)link前继后继
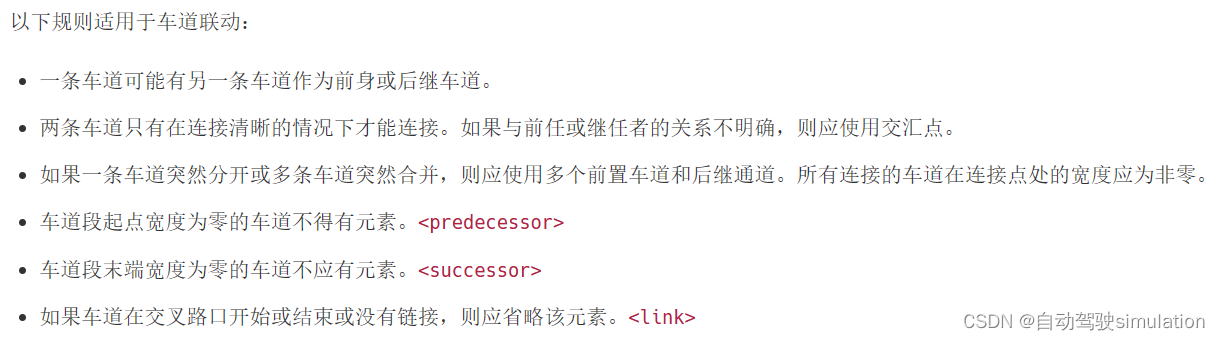
- 4)道路link规则
- 3、road-type介绍
- 1)type的拓扑结构
- 4、road-elevation介绍
- 1) elevation类型
- 2)Elevation拓扑图
- 3)标高/超高计算
- 4)横向轮廓计算
- 5、road-surface介绍
- 1)surface的拓扑结构
- 6、road-lane介绍
- 1)lane的拓扑结构
- 2)车道分组
- 3)车道部分
- 4)车道偏移
- 5)车道链接
- 6)车道属性
- A、车道属性-拓扑结构
- B、车道属性-车道宽度
- C、车道属性-车道高度
- 7)车道类型
- 8)车道限速
- 8)车道标记
前言
本文内容引用ASAM官方OpenDrive V1.7介绍
ASAM是“Automotive Software and Systems Modeling”的缩写,是一个汽车行业标准化组织,旨在制定和维护与汽车软件和系统相关的标准。OpenDRIVE是一种用于虚拟仿真场景的开放标准,旨在描述道路网络和场景的详细信息,是仿真场景中的静态组成部分,以支持自动驾驶和驾驶辅助系统的开发和测试。
点击下载OpenDRIVE官方文档及案例
一、仿真场景的构成
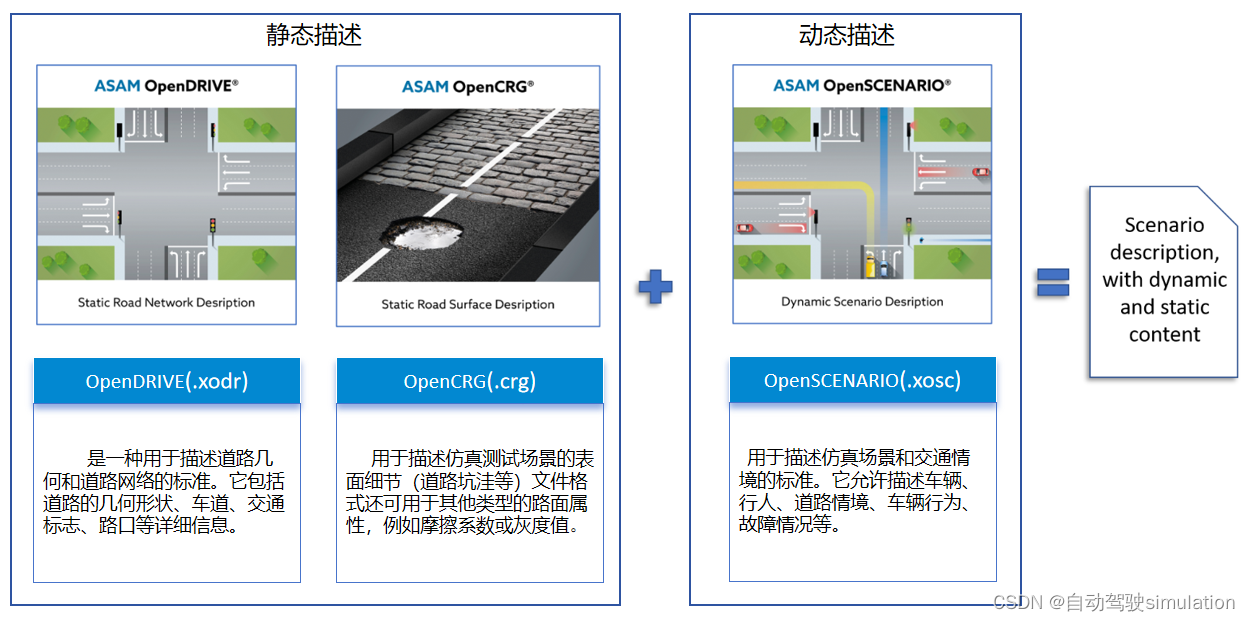
ASAM OpenDRIVE定义了静态路网格式(.xodr),ASAM OpenCRG,可以为路网添加路面描述(.crg)。 ASAM OpenDRIVE和ASAM OpenCRG仅包含静态内容。要添加动态内容,需要ASAM OpenSCENARIO(.xosc)。 结合所有三个标准文件,就可以组成标准的仿真场景。
二、openDRIVE框架
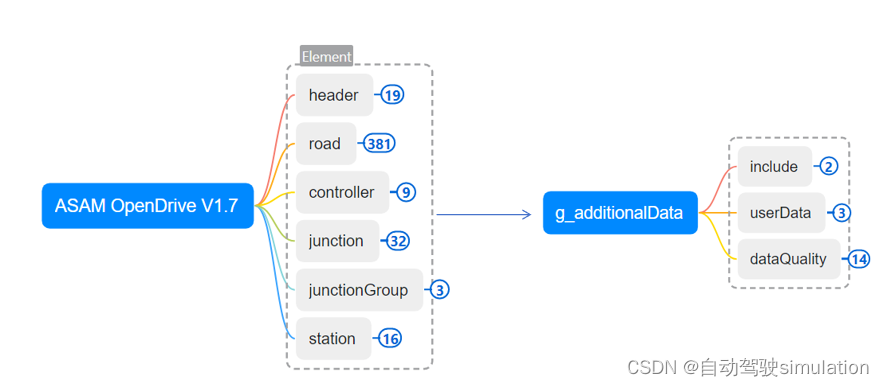
1、ASAM OpenDRIVE框架组成主要为header、road、controller、junction、junctionGroup、station,主要由6个element组成,6个Element及其子Element可选择性关联g_additionalData(附加数据)。
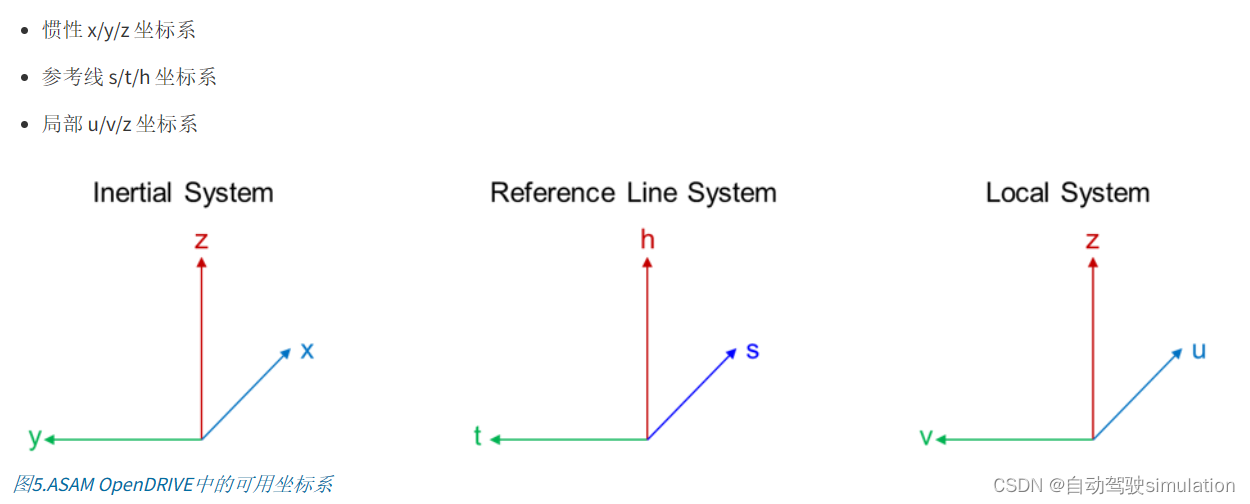
2、openDRIVE中的坐标系
三、g_additionalData
1、g_additionalData附加数据做为可选的选项,Element可以自定义是否关联g_additionalData节点;g_additionalData节点用于向OpenDRIVE道路网络描述中添加自定义信息或额外的数据,其拓扑结构如下图所示;
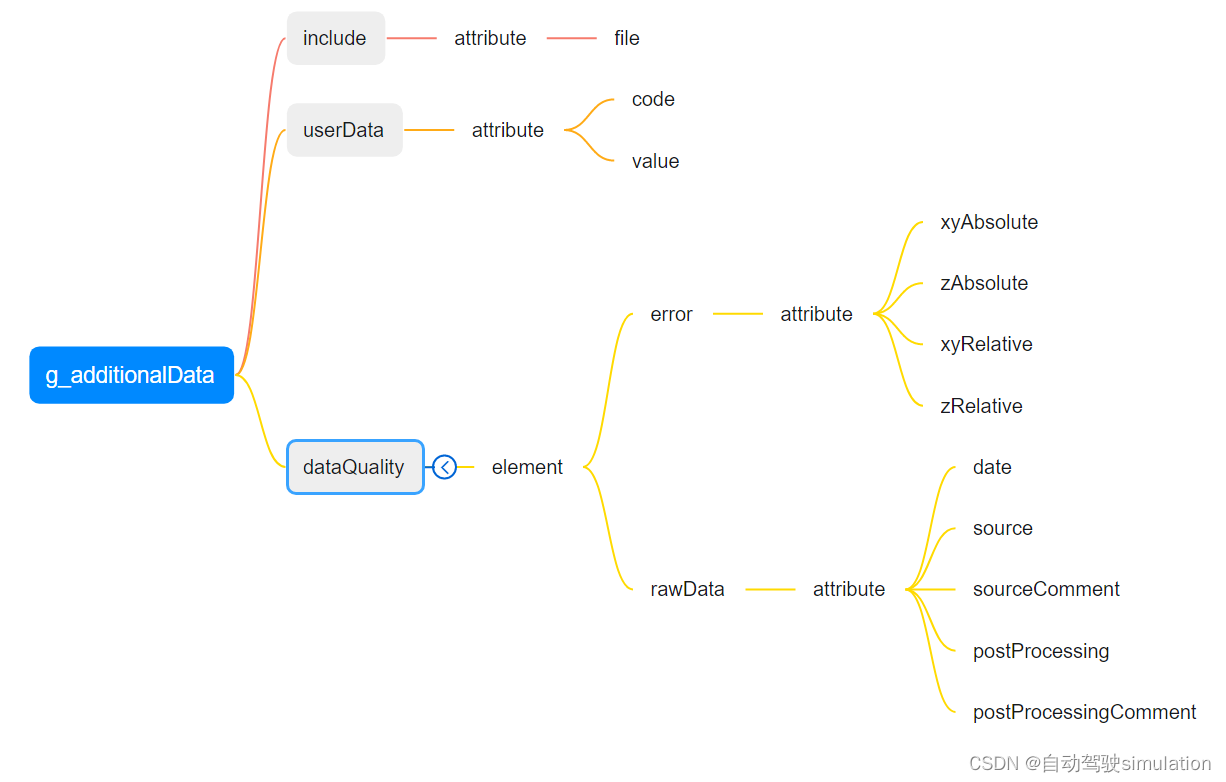
2、g_additionalData中的include,允许将外部文件包含在ASAM OpenDRIVE文件中, 比如对外部的文件的引用可以放在include元素中。
3、g_additionalData中的userdata可以用于在OpenDRIVE道路网络描述中添加任意自定义信息,以满足特定需求或添加额外的详细信息。通常,userdata的内容是用户根据其特定应用场景定义的。
4、g_additionalData中的dataQuality,原始数据或集成在ASAM OpenDRIVE中的外部来源的数据可能具有不同的质量。 可以在ASAM OpenDRIVE中描述外部数据的质量和准确性。dataQuality的error可以描述外部数据(如GPS数据)的绝对误差和相对误差范围(以 [m] 为单位)。dataQuality的rawData描述一些基本元数据包含有关ASAM OpenDRIVE中包含的原始数据的信息,内容比较多,详细格式请看我上传的资源文档。
XML片段
<OpenDRIVE><road><lanes><laneSection><left><lane><g_additionalData><!-- 附加数据 --><key>myKey</key><value>myValue</value></g_additionalData></lane></left></laneSection></lanes></road>
</OpenDRIVE>
四、openDRIVE-header
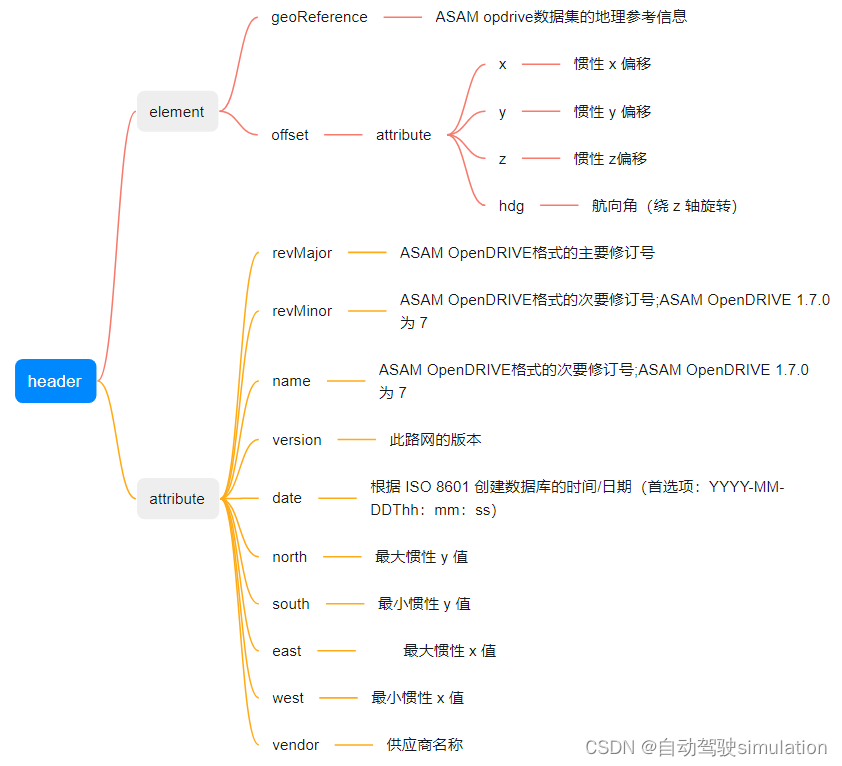
1、OpenDRIVE中的header一般定义:版本信息、描述信息、创建者信息、日期时间戳、坐标信息等等,其拓扑结构如下图所示;
XML片段
<?xml version="1.0" encoding="UTF-8"?>
<OpenDRIVE><header><revMajor>1</revMajor><revMinor>4</revMinor><name>Example Road</name><version>1.0</version><date>2023-11-12</date><north>0.0</north><south>0.0</south><east>0.0</east><west>0.0</west><!-- 其他头部信息 --></header><!-- 其他道路信息 -->
</OpenDRIVE>五、openDRIVE-road
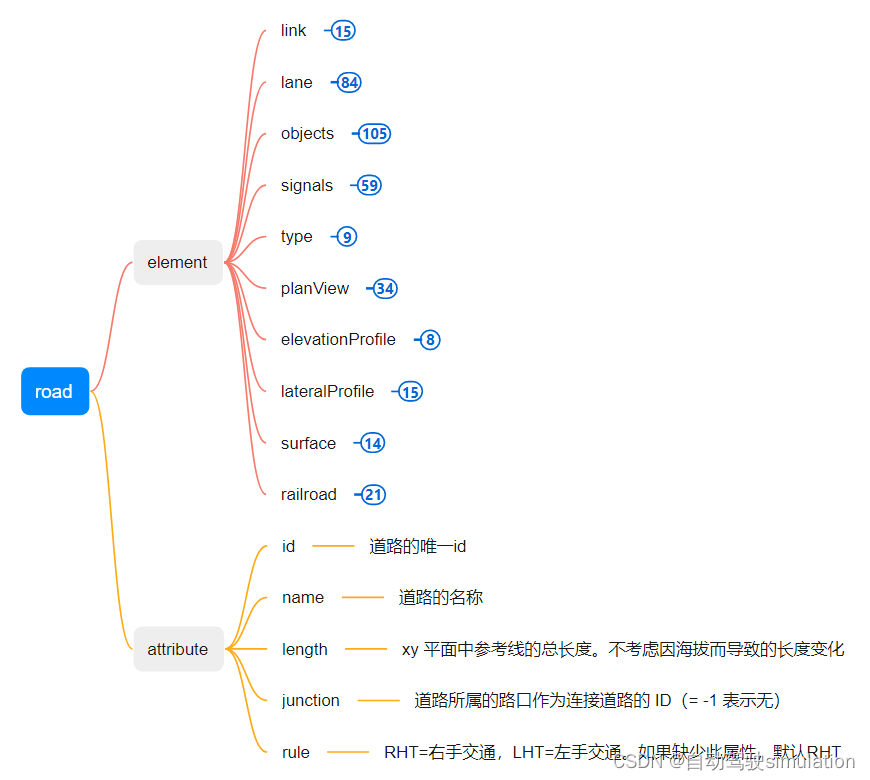
1、Road总拓扑结构
2、Road-link介绍
road节点中的link主要是用于描述两个不同的道路部分之间的过渡和连接关系;
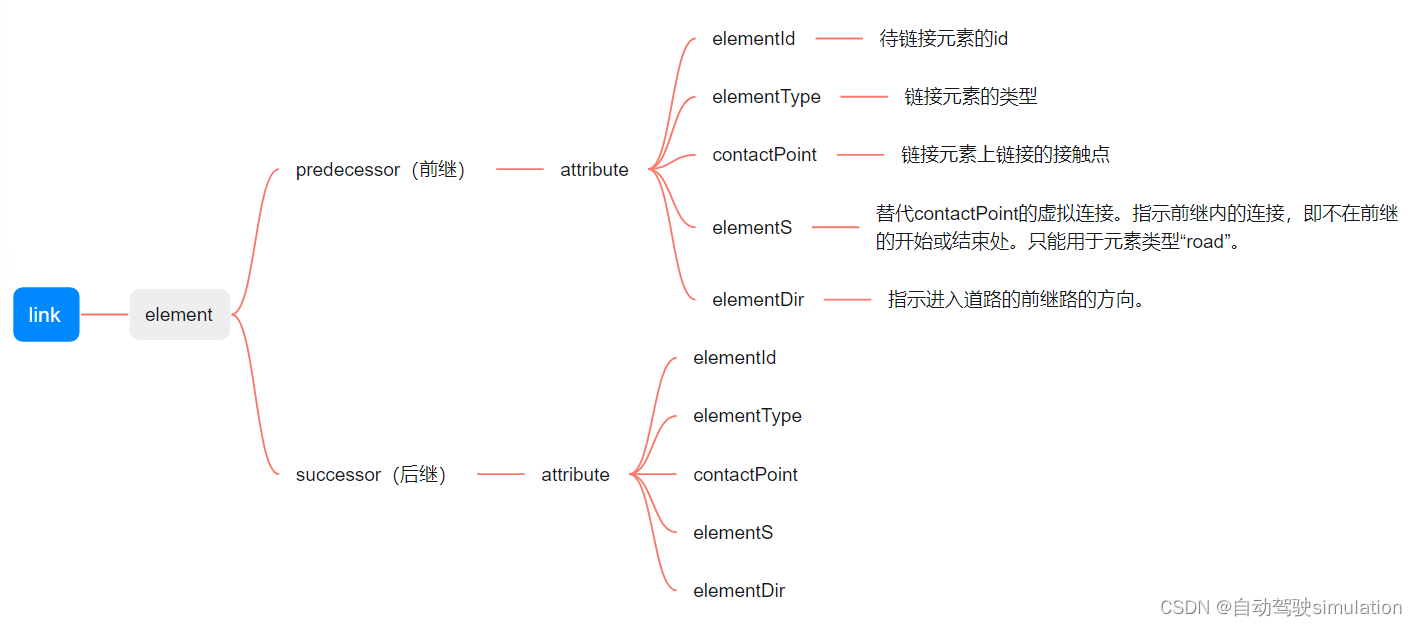
1)link的拓扑结构
XML片段
<OpenDRIVE><!-- 头部信息 --><road name="Road 1" id="1" length="100.0"><!-- 道路属性 --><link><predecessor elementType="road" elementId="2" elementDir="-1" elementS="0.0" contactPoint="end"/><successor elementType="road" elementId="3" elementDir="1" elementS="0.0" contactPoint="start"/></link><!-- 其他道路元素 --></road><!-- 其他道路信息 --></OpenDRIVE>
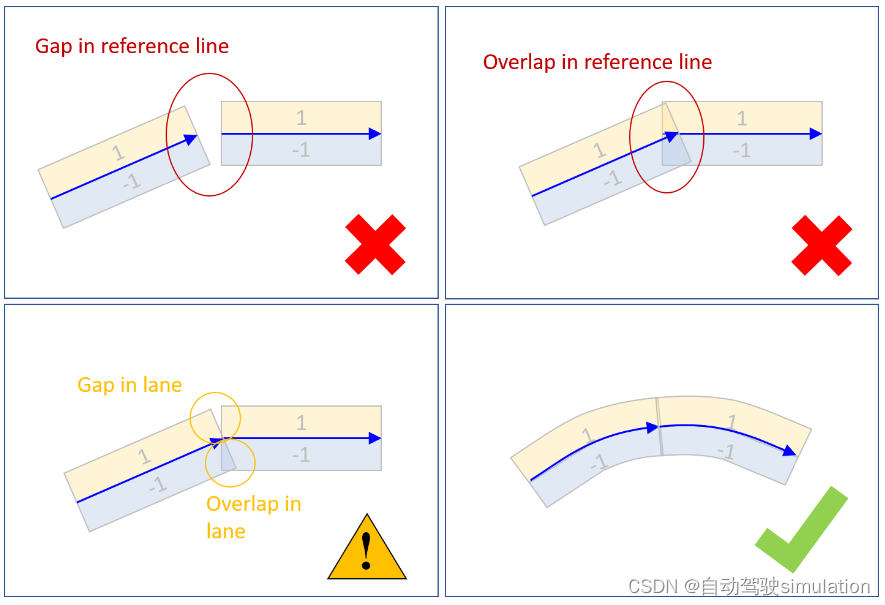
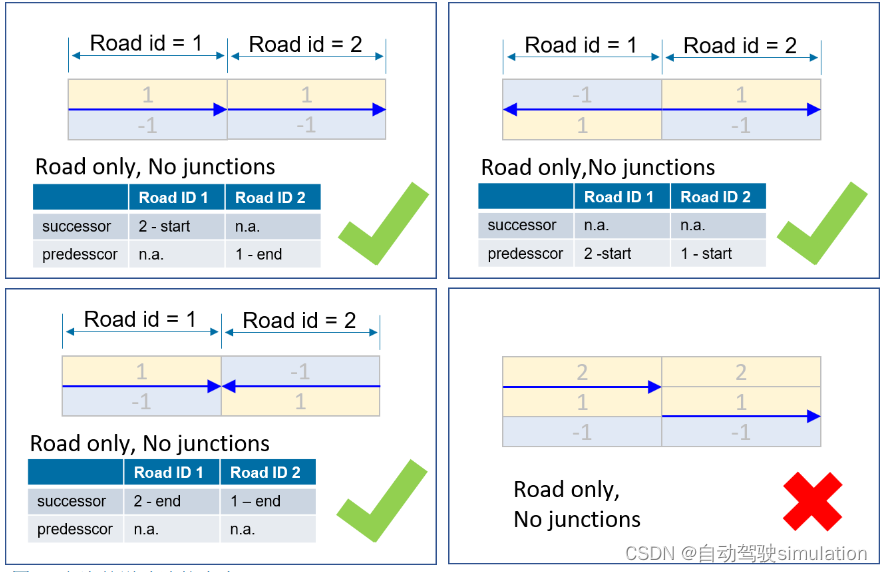
2)link链接示例
显示了禁止、允许和推荐的道路连接场景。 重要的是,要连接的道路的车道和参考线与其前继或后继道路有直接的联系。 应避免重叠或跳跃,但如果参考线连接正确,则不禁止重叠或跳跃。
3)link前继后继
link的元素predecessor(前继)和successor(后继)表示的时道路之间的相对关闭,如road1之前没有道路,因此没有前继;road1之后有road2说明road1有后继road2;
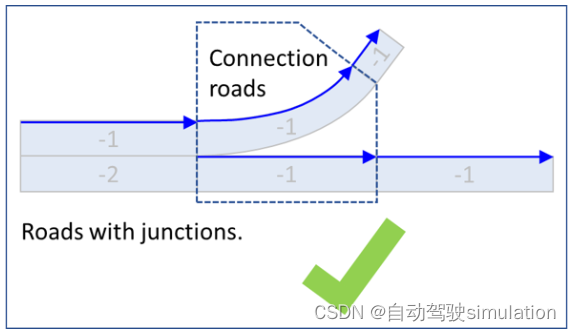
4)道路link规则
下述这种链接方式也是被允许的
3、road-type介绍
1)type的拓扑结构
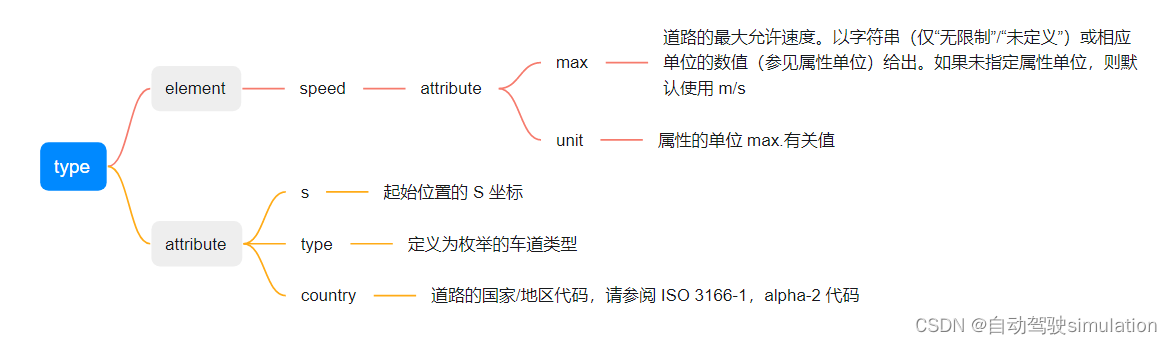
<OpenDRIVE><!-- 头部信息 --><road name="Road 1" id="1" length="100.0"><planView><!-- 道路几何形状信息 --></planView><lanes><!-- 道路车道信息 --></lanes><objects><!-- 道路对象信息 --></objects><roadType s="0.0"><type type="urban"><name>Urban Road</name><priority>2</priority><speed max="50.0" unit="km/h"/><country>China</country></type></roadType><!-- 其他道路元素 --></road><!-- 其他道路信息 --></OpenDRIVE>4、road-elevation介绍
1) elevation类型
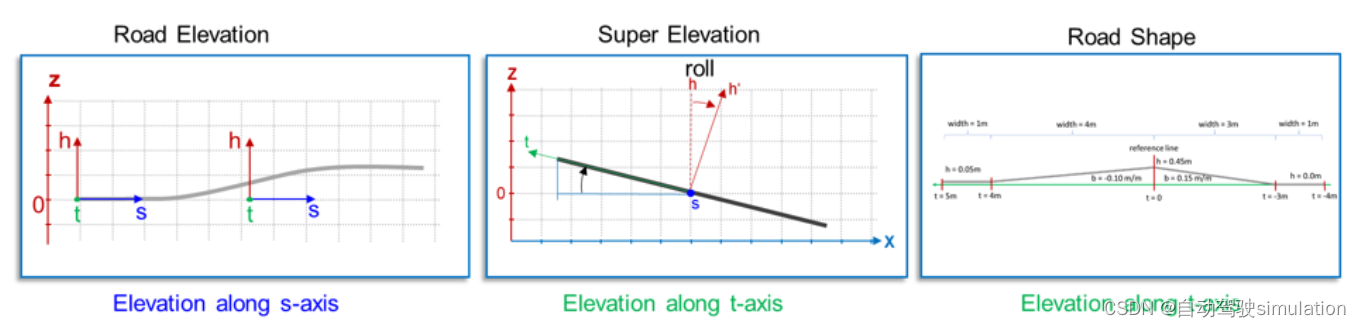
A、Road Elevation(标高)指的是沿道路参考线的海拔,即s方向的海拔;
B、Su[er Elevation(超高)指的是道路侧向剖面,垂直于道路参考线,且与地面存在夹角(类似于车辆的roll侧倾角),即t方向的海拔。
C、Road Shape(形状)一些横向道路形状过于复杂,无法仅用超高来描述。 形状以更详细的方式描述参考线上给定点处道路横截面的海拔。 这意味着,在一个 s 坐标处可能存在多个具有不同 t 值的形状定义,从而描述道路的弯曲形状。
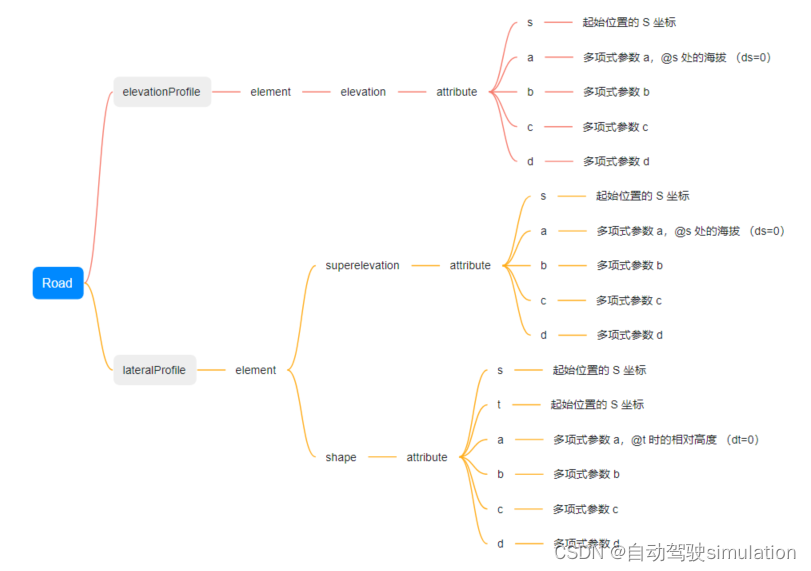
2)Elevation拓扑图
XML片段
<road name="Road 1" id="1" length="100.0"><road-elevationprofile><elevation s="0.0" a="0.0" b="0.0" c="0.0" d="0.0"/><elevation s="50.0" a="0.0" b="0.0" c="0.0" d="0.0"/></road-elevationprofile><road-lateralprofile><superelevation s="0.0" a="0.0" b="0.0" c="0.0" d="0.0"/><crossfall s="0.0" a="0.0" b="0.0" c="0.0" d="0.0"/></road-lateralprofile><road-shape><shape s="0.0" x="0.0" y="0.0"/><shape s="50.0" x="10.0" y="5.0"/></road-shape>
</road>
3)标高/超高计算
道路标高、超高使用以下三阶多项式函数计算:elev(ds) = a + b*ds + c*ds² + d*ds³
| 参数名 | 描述 |
|---|---|
| elev | 指定位置的标高/超高 |
| a, b, c, d | 多项式系数 |
| ds | 是新标高/超高元素的起点与给定位置之间沿参考线的距离 |
道路标高/超高的绝对位置计算:s = sstart + ds
| 参数名 | 描述 |
|---|---|
| s | 是参考线坐标系中的绝对位置 |
| sstart | 是元素在参考线坐标系中的起始位置 |
4)横向轮廓计算
在下图中显示了如何计算两个横向剖面之间的高度信息。sR1的侧剖面有5个多项式定义,而sR2的侧剖面有3个多项式定义。要计算两个侧面轮廓之间的点,下图所示的公式在这两个轮廓之间进行线性插值。
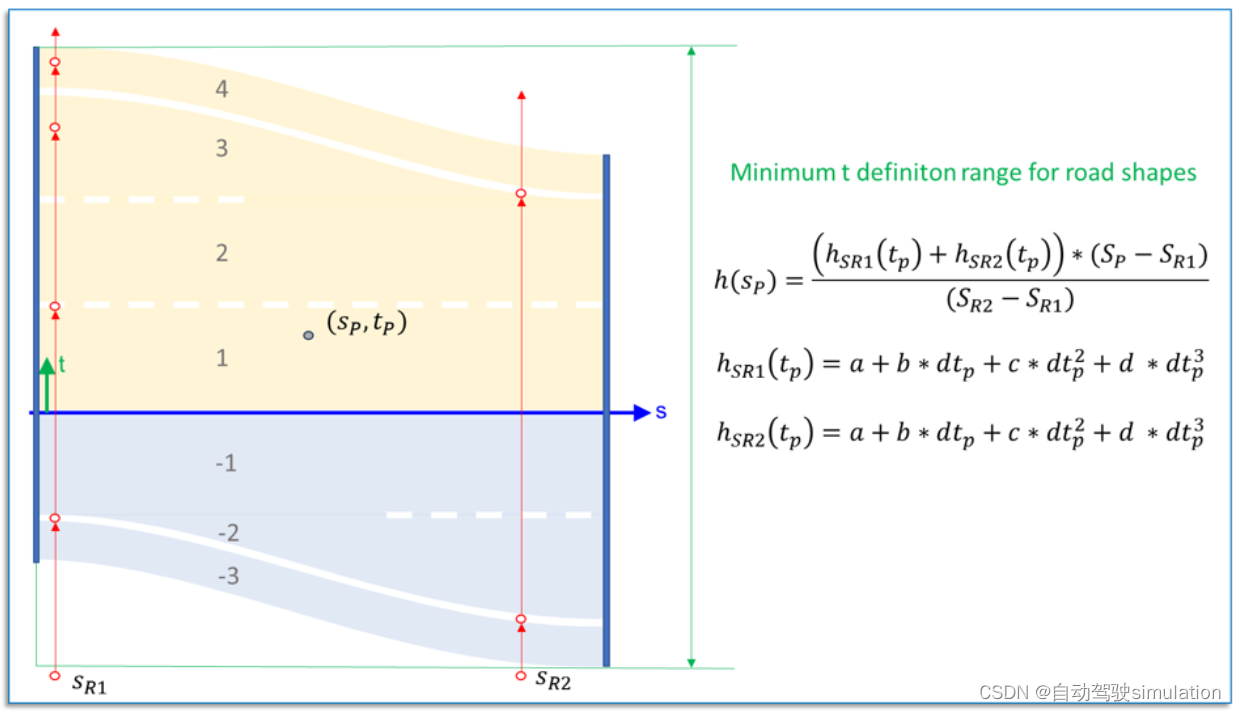
横向轮廓的形状使用以下多项式函数计算:hShape (ds)= a + b*dt + c*dt² + d*dt³
| 参数名 | 描述 |
|---|---|
| hShape | 是给定位置上参考平面上方的高度 |
| a, b, c, d | 是系数 |
| dt | 是形状元素的起点与给定位置之间垂直于参考线的距离 |
形状值的绝对位置计算如下:t = tstart + dt
| 参数名 | 描述 |
|---|---|
| t | 是参考线坐标系中的绝对位置 |
| a, b, c, d | 是元素在参考线坐标系中的起始位置 |
| tstart | 是元素在参考线坐标系中的起始位置 |
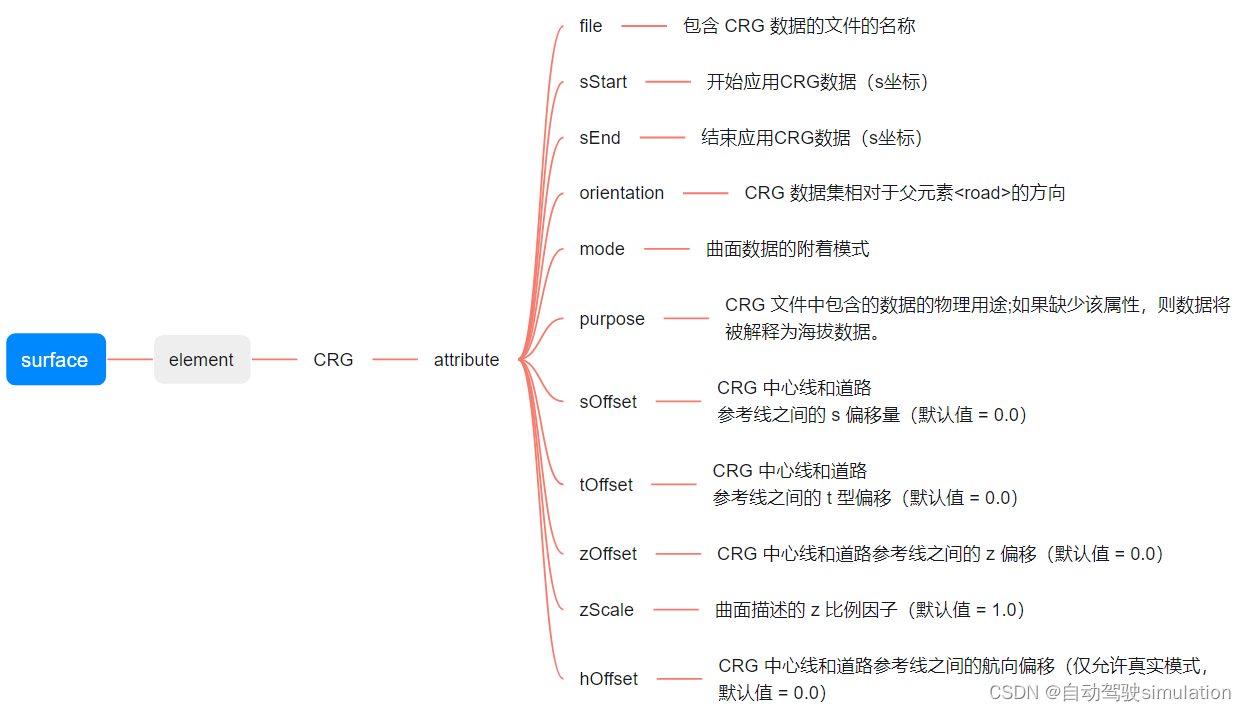
5、road-surface介绍
1)surface的拓扑结构
XML片段
<road name="Road 1" id="1" length="100.0"><road-surface><friction s="0.0" coefficient="0.8"/><color s="0.0" r="255" g="255" b="255"/></road-surface>
</road>
因为suface涉及CRG相关内容,后续再另开分支讲述清楚吧。
6、road-lane介绍
1)lane的拓扑结构

XML片段
<road name="Road 1" id="1" length="100.0"><road-lane><laneSection s="0.0"><lane id="1" type="driving"><width sOffset="0.0" a="3.5"/><road-mark sOffset="0.0" type="solid" color="standard"/><speed sOffset="0.0" max="60.0" unit="km/h"/><access restriction="no"/><height sOffset="0.0" inner="3.8" outer="4.0"/><rule priority="1" yield="true"/><material surface="asphalt" friction="0.8"/><visibility sOffset="0.0" forward="100.0" back="50.0"/><border left="true" right="true"/><predecessor id="2" contactPoint="end"/><successor id="4" contactPoint="start"/><link elementId="laneLink1"/><userData><property name="laneType" value="driving"/></userData></lane><lane id="2" type="driving"><!-- 其他元素和属性 --></lane></laneSection></road-lane>
</road>
2)车道分组
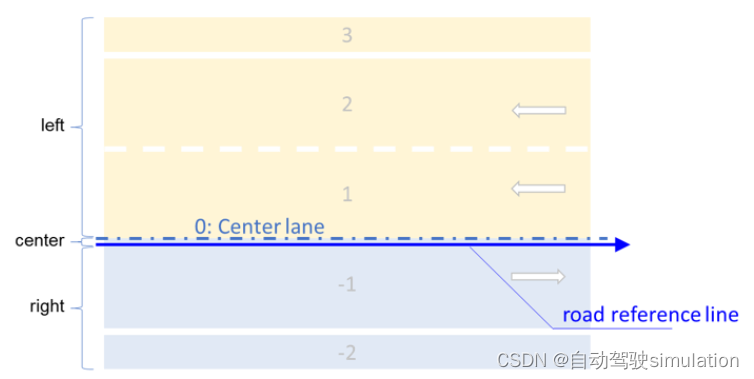
A、车道部分内的车道分为左侧、中间和右侧车道。左侧车道ID为正数,右侧车道ID为负数,中间车道线(道路参考线)为0。
3)车道部分
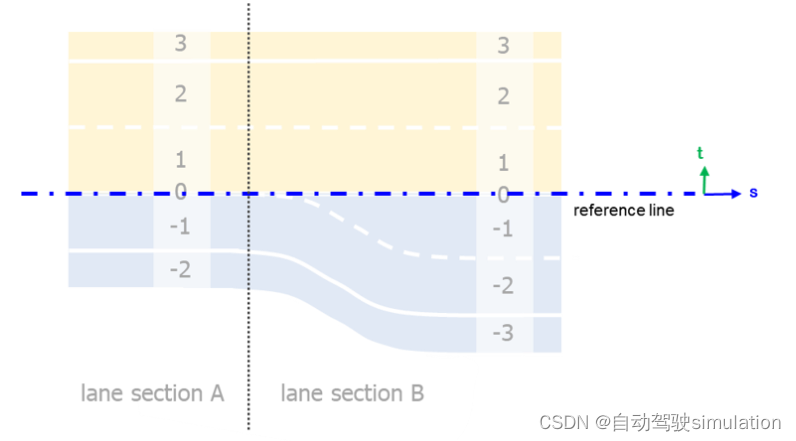
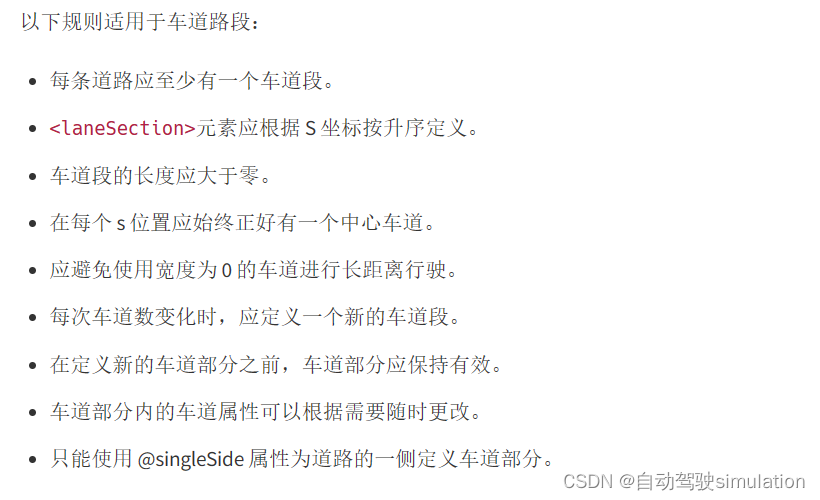
A、车道可以分为多个车道部分。 每个车道段包含固定数量的车道。 每当车道数量发生变化时,都需要一个新的车道段,另外车道段沿着车道参考线升序排列,即(st坐标中的s方向)
B、为了简化复杂道路的车道部分的使用,可以仅使用Lane section中的 @singleSide属性为道路的一侧定义车道部分。
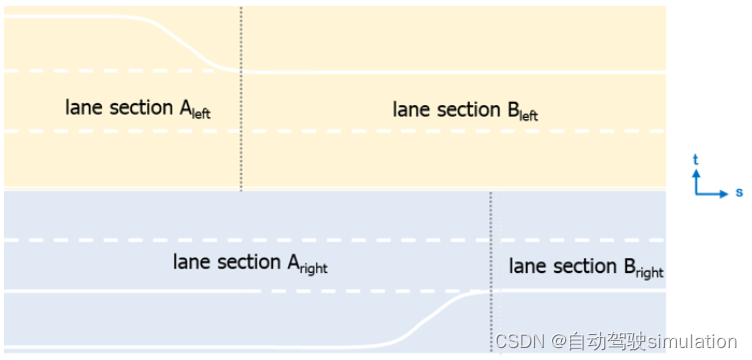
C、Lane section属性,singleSide字段表示车道是否只存在于道路的一侧。它是一个布尔值,用于指示车道是否仅存在于道路的一个侧面。如果singleSide为true,则表示车道只存在于道路的一侧,通常用于描述单行道或特定交通情况下的车道布局。如果singleSide为false,则表示车道存在于道路的两侧,通常用于描述双行道或多车道道路的车道布局。
| 参数名 | 描述 |
|---|---|
| s | 起始位置的 S 坐标 |
| singleSide | 车道截面元素仅对一侧(左侧、中心或右侧)有效,具体取决于子元素。 |
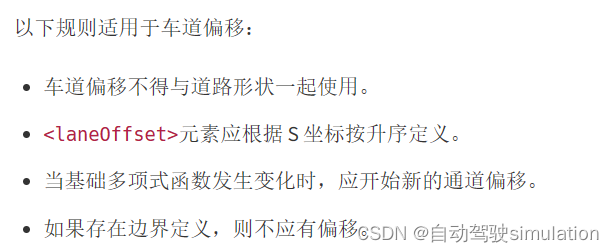
4)车道偏移
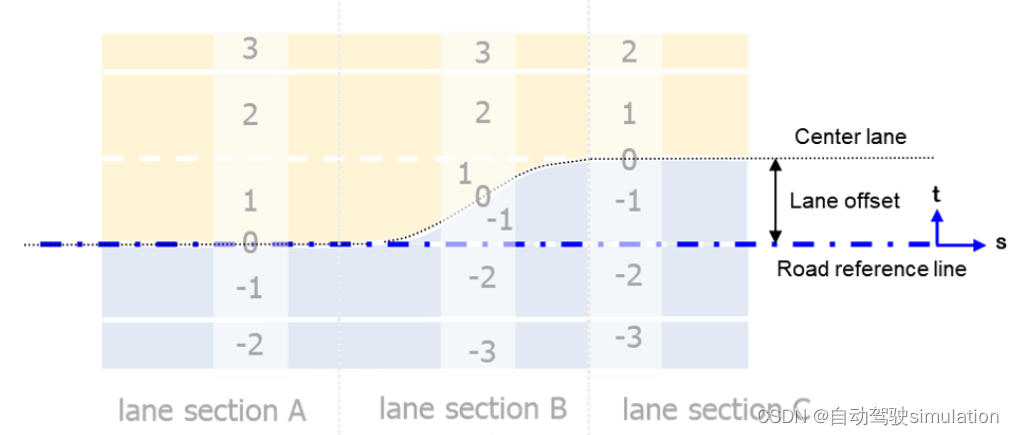
A、车道偏移可用于将中心车道移离道路参考线。 这样可以更轻松地对道路上车道的局部横向移动进行建模,例如左转车道。车道偏移(road offset)和形状定义(road shape)的组合可能会导致不一致,具体取决于用于车道偏移的插值。 由于线性插值用于沿参考线的道路形状,因此线性插值也应用于偏移定义;下图描述中心车道远离道路参考线的偏移量。
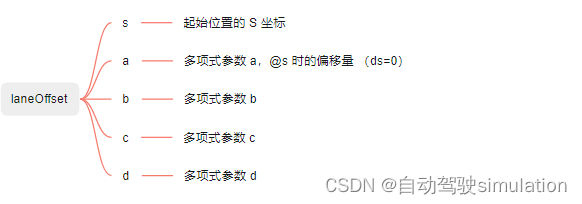
B、给定点的偏移量使用以下三阶多项式函数计算:offset (ds) = a + b*ds + c*ds² + d*ds³
| 参数名 | 描述 |
|---|---|
| offset | 是给定位置的横向偏移量 |
| a, b, c, d | 多项式系数 |
| ds | 是新车道偏移元素的起点与给定位置之间沿道路参考线的距离 |
偏移值的绝对位置:s = sstart + ds
| 参数名 | 描述 |
|---|---|
| s | 是参考线坐标系中的绝对位置 |
| sstart | 是元素在参考线坐标系中的起始位置 |
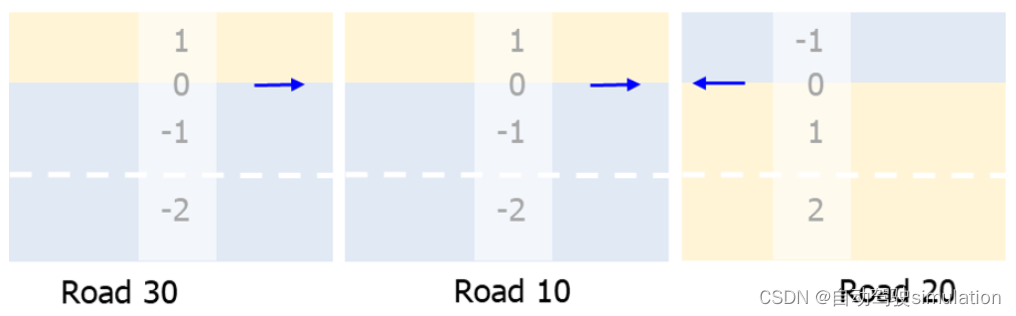
C、每次多项式函数更改时,都需要一个新的通道偏移元素,下面是XML示例。
<lanes><laneOffset s="25.0" a="0.0" b="0.0" c="3.9e-03" d="-5.2e-05"/><laneOffset s="75.0" a="3.25" b="0.0" c="0.0" d="0.0"/>…
</lanes>
5)车道链接
A、车道链接有两个元素,predecessor(前继)和successor(后继), 车道可以与同一条或另一条道路上的车道相连;

它们之间的前后继链接关系如下图所示:

6)车道属性
A、车道属性-拓扑结构
车道属性描述车道的用途和形状。 车道属性是按车道路段定义的,但可能会在该路段内更改。 如果未为车道部分专门定义属性,则应用程序可以应用默认属性;车道属性拓扑结构如下图所示。
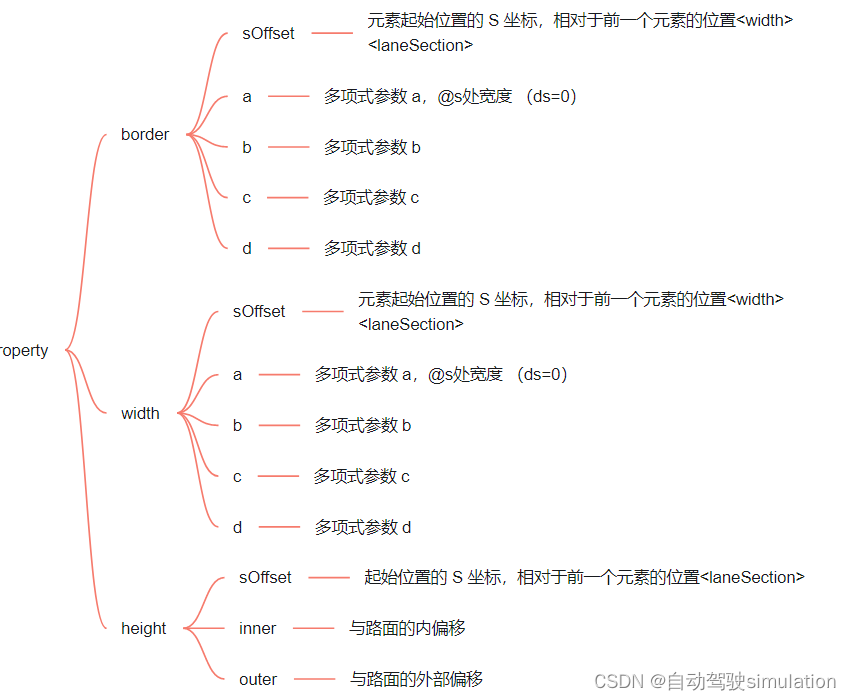
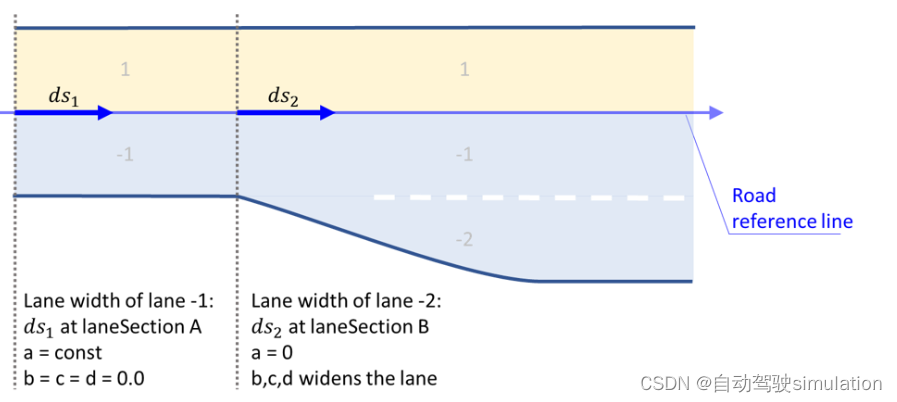
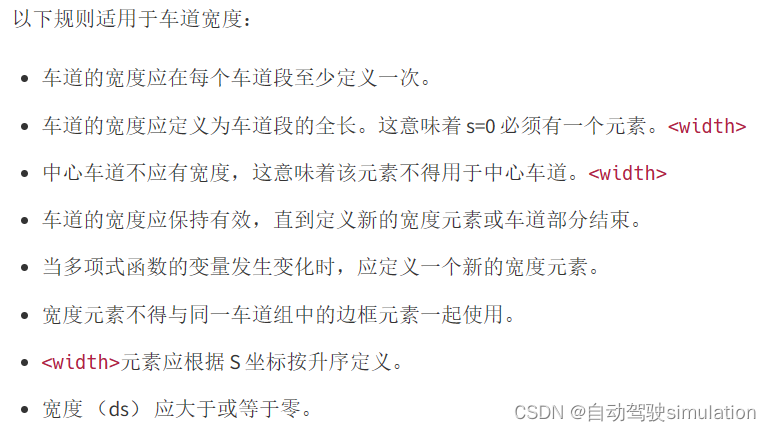
B、车道属性-车道宽度
a、给定点的宽度使用以下三阶多项式函数计算:Width (ds) = a + b*ds + c*ds² + d*ds³
| 参数名 | 描述 |
|---|---|
| width | 是给定位置的宽度 |
| a, b, c, d | 多项式系数 |
| ds | 是新车道宽度元素的起点与给定位置之间沿道路参考线的距离 |
ds每个元素从零开始。 宽度值的绝对位置计算如下::s = ssection + offsetstart + ds
| 参数名 | 描述 |
|---|---|
| s | 是参考线坐标系中的绝对位置 |
| sSection | 是前一个车道段元素在航迹坐标系中的起始位置 |
| offsetStart | 是元素相对于前一个车道部分的偏移量 |
b、从不同偏移位置开始的正 s 方向上车道宽度的变化
C、车道属性-车道高度
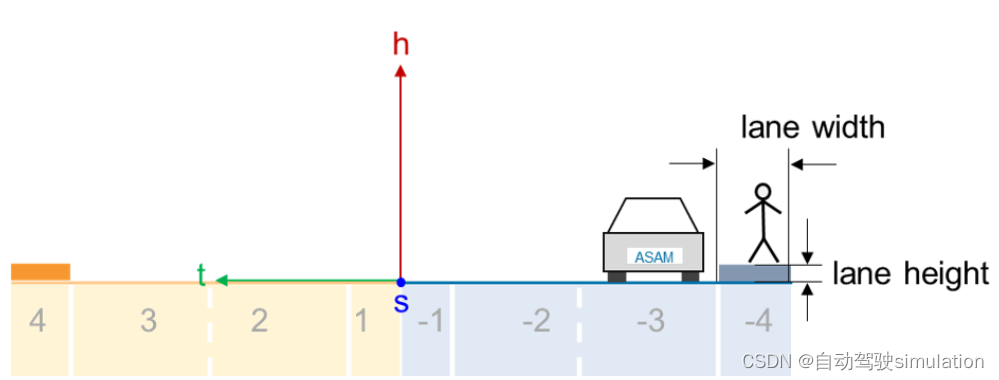
a、车道高度应沿 h 坐标定义。 车道高度可用于抬高独立于道路标高的车道。 车道高度用于实现小比例尺的标高,例如抬高人行道,如图下图所示。 车道高度指定为 z 方向上与道路的偏移量(包括标高、超高、形状)。
b、XML片段
<lane id="-2" type="sidewalk" level="false"><link><successor id="-3"/></link><width sOffset="0.0" a="2.0" b="0.0" c="0.0" d="0.0"/><height sOffset="0.0" inner="0.12" outer="0.12"/>
</lane>
7)车道类型
A、车道类型分类
| 类型 | 描述 |
|---|---|
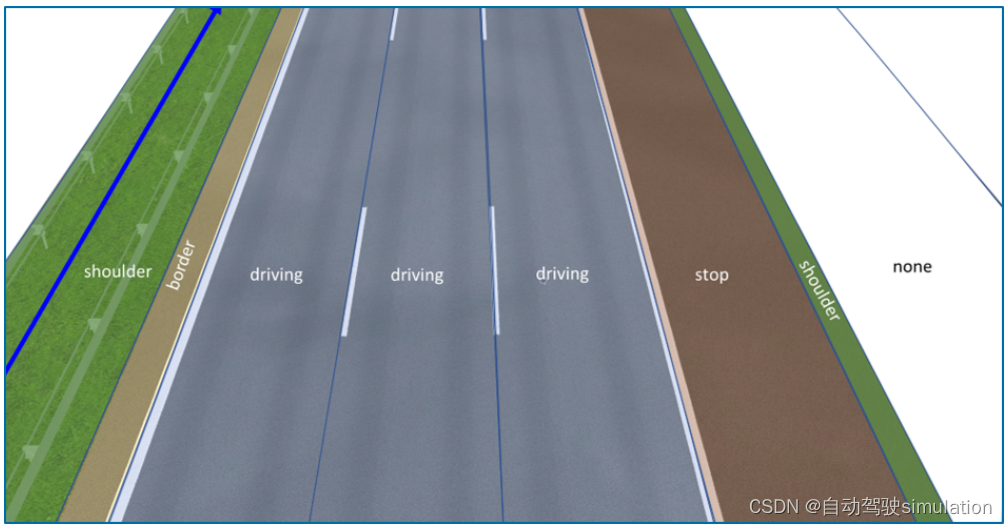
| shoulder | 描述道路边缘的软边框。 |
| border | 描述道路边缘的硬边框。与可行驶车道具有相同的高度。 |
| driving | 描述一条“正常”的可行驶道路,不属于其他类型之一。 |
| stop | 用于紧急停车的高速公路硬路肩。 |
| none | 描述道路最外侧的空间,没有实际内容,其唯一目的是在驾驶员离开道路时注册ASAM OpenDRIVE的存在。 |
| restricted | 描述不应该有车辆行驶的车道。该车道与可行驶车道具有相同的高度。通常使用线条分隔车道,经常包含虚线。 |
| parking | 描述带有停车位的车道。 |
| median | 描述位于相反行驶方向的行驶车道之间的车道。通常用于在大型道路上分隔交通。 |
| biking | 描述为自行车保留的车道。 |
| sidewalk | 描述供行人行走的车道。 |
| curb | 描述路缘石。路缘石的高度与相邻的可行驶车道不同。 |
| exit | 描述用于与主干道平行的部分的车道。主要用于减速车道。 |
| entry | 描述用于与主干道平行的部分的车道。主要用于加速车道。 |
| onramp | 从乡村或城市道路通向高速公路的匝道。 |
| offRamp | 从高速公路通向乡村或城市道路的匝道。 |
| connectingRamp | 连接两条高速公路的匝道,例如高速公路交汇处。 |
—高速公路的车道类型
—乡村道路的车道类型

—城市道路的车道类型
—高速公路出口和入口的车道类型

8)车道限速
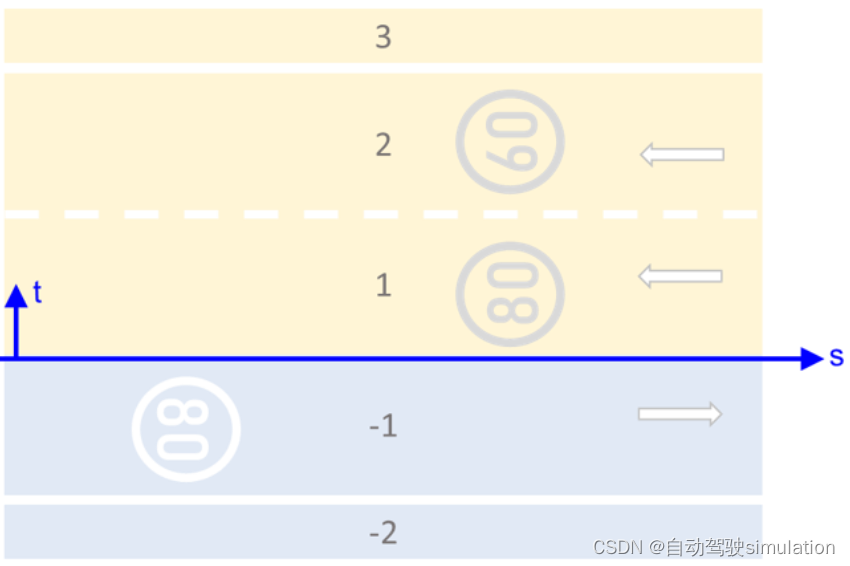
可以定义车道上允许的最大速度。车道限速优先于道路限速。
8)车道标记
A、拓扑结构图

XML片段
<road><!-- 路段信息 --><lanes><!-- 车道信息 --><laneSection><!-- 车道段信息 --><left><!-- 左侧车道信息 --><lane><!-- 车道信息 --><roadMark><!-- 车道标线 --><sOffset>0.0</sOffset><width>0.1</width><type>solid</type><color>white</color><!-- 其他属性 --></roadMark></lane><!-- 其他左侧车道 --></left><center><!-- 中心车道信息 --><!-- 中心车道的车道标线 --></center><right><!-- 右侧车道信息 --><!-- 右侧车道的车道标线 --></right></laneSection><!-- 其他车道段 --></lanes><!-- 其他道路元素 --></road>
以上,就是从ASAM中整理下来的一些关于openDrive的一些内容,因为内容比较多。可能会分几篇来写,也有一些内容描述的不是很详细,请大家见谅哈,后续有空再补充。
相关文章:
ASAM OpenDRIVE V1.7协议超详解(一)
文章目录 前言一、仿真场景的构成二、openDRIVE框架三、g_additionalData四、openDRIVE-header五、openDRIVE-road1、Road总拓扑结构2、Road-link介绍1)link的拓扑结构2)link链接示例3)link前继后继4)道路link规则 3、road-type介…...

springboot的配置信息的设置和读取(application.properties/application.yml)
springboot提供了两种配置信息的文件格式,application.properties和application.yml,基于直接明了,使用方便和高效的前提下下面的配置均采用yml格式配置, 注意 yml采用缩减方式来排列键后面紧跟冒号,然后空格&#x…...
Deepsort项目详解
一、目标追踪整体代码 代码目录如下图所示: 、 追踪相关代码: 检测相关代码和权重 调用 检测 和 追踪的代码: 首先代码分为三个部分: 目标追踪的相关代码和权重目标检测相关代码和权重,这里用的是yolov5.5目标检…...
C语言证明一个偶数总能表示为两个素数之和。输入一个偶数并将其分解为两个素数
完整代码: // 一个偶数总能表示为两个素数之和。输入一个偶数并将其分解为两个素数#include<stdio.h>//判断一个数n是否为素数 int isPrimeNumber(int n){//1不是素数if (n1){return 0;}for (int i 2; i <(n/2); i){//当有n能被整除时,不是素…...

Python 的 datetime 模块
目录 简介 一、date类 (一)date 类属性 (二)date 类方法 (三)实例属性 (四)实例的方法 二、time类 (一)time 类属性 (二)tim…...
Termius for Mac:掌控您的云端世界,安全高效的SSH客户端
你是否曾经在Mac上苦苦寻找一个好用的SSH客户端,让你能够远程连接到Linux服务器,轻松管理你的云端世界?现在,我们向你介绍一款强大而高效的SSH客户端——Termius。 Termius是一款专为Mac用户设计的SSH客户端,它提供了…...

Ubuntu 下监控并自动重启网卡
很多时候网站服务器挂掉也可能是因为网卡挂掉了,如果你网站不能访问时 SSH 也无效了一般都是这个问题。这时可以通过一个定时脚本监控网络并进行自动重启。 1 创建脚本 auto_restart_network.sh 4 5 6 7 8 9 #!/bin/bash ping www.baidu.com -c 1 >/dev/null i…...

377. 组合总和 Ⅳ
给你一个由 不同 整数组成的数组 nums ,和一个目标整数 target 。请你从 nums 中找出并返回总和为 target 的元素组合的个数。 题目数据保证答案符合 32 位整数范围。 示例 1: 输入:nums [1,2,3], target 4 输出:7 解释&#…...

【OpenCV】计算视频的光流并跟踪物体calcOpticalFlowPyrLK
一、介绍 计算光流可以使用OpenCV的calcOpticalFlowPyrLK方法,cv2.calcOpticalFlowPyrLK是OpenCV库中的一个函数,用于计算稀疏光流。它实现的是Lucas-Kanade方法,这是一种常用的光流计算方法。 光流是图像中物体运动的近似表示&#…...

C语言进阶
数组 在基础篇说过,数组实际上是构造类型之一,是连续存放的。 一维数组 定义 定义格式:[存储类型] 数据类型 数组名标识符[下标]; 下面分模块来介绍一下数组的定义部分的内容。 1、初始化和元素引用: 可以看到数组是连续存储…...

Linux之gdb
gdb就是一个Linux的调试工具,类似与vs里面的调试 可执行程序也有格式,不是简单的二进制堆砌...
——第3天:风控建模中如何处理缺失值?)
100天精通风控建模(原理+Python实现)——第3天:风控建模中如何处理缺失值?
风控模型已在各大银行和公司都实际运用于业务,用于营销和风险控制等。 之前已经阐述了100天精通风控建模(原理+Python实现)——第1天:什么是风控建模? 100天精通风控建模(原理+Python实现)——第2天:风控建模有什么目的? 接下来看下100天精通风控建模(原理…...
Leetcode—680.验证回文串II【简单】
2023每日刷题(二十七) Leetcode—680.验证回文串II 实现代码 class Solution { public:bool judgeFunc(string s, int left, int right) {while(left < right) {if(s[left] ! s[right]) {return false;}left;right--;}return true;}bool validPalin…...
Redis五种数据类型及命令操作(二)
🎈个人公众号:🎈 :✨✨✨ 可为编程✨ 🍟🍟 🔑个人信条:🔑 知足知不足 有为有不为 为与不为皆为可为🌵 🍉本篇简介:🍉 本篇记录Redis五种数据类型及命令操作,如…...
:MDA模型驱动架构及元数据系统设计)
低代码信创开发核心技术(三):MDA模型驱动架构及元数据系统设计
前言 写最后一篇文章的时候,我本人其实犹豫了半年,在想是否发布出这篇文章,因为可能会动了很多人的利益。所以这篇文章既是整个低代码信创开发的高度总结,也是最为精华的一部分,它点明了低代码中最为核心的技术。虽然…...
HslCommunication模拟西门子读写数据
导入HslCommunication C#端代码(上位机) 这里要注意的是上位机IP用的当前电脑的IP。 using HslCommunication; using HslCommunication.Profinet.Siemens; using System; using System.Collections.Generic; using System.ComponentModel; using Syste…...

多测师肖sir_高级金牌讲师_ui自动化po框架版本02
ui自动化po框架版本02 一、 pages下的BasePage.py模块 此模块是封装所有用例的基类 比如说:所有用例要用到的元素定位,以及输入框输入,点击,下拉等等公共方法import unittest #导入unittest 框架 from time import *# 调试代码…...
)
线性判别分析(Linear Discriminant Analysis,LDA)
Linear Discriminant Analysis(LDA) 输入: 原始数据$D((x_1,y_1),(x_2,y_2),...,(x_m,y_m)$ 、 类别标签$Y[y_1,y_2,...,y_n]$、 降维到的维度d输出: 投影矩阵W、投影后的样本$Z$、算法步骤: 1.计算类内散度…...

git的分支及标签使用及情景演示
目录 一. 环境讲述 二.分支 1.1 命令 1.2情景演练 三、标签 3.1 命令 3.2 情景演示 编辑 一. 环境讲述 当软件从开发到正式环境部署的过程中,不同环境的作用如下: 开发环境:用于开发人员进行软件开发、测试和调试。在这个环境中…...

深度解析找不到msvcp120.dll相关问题以及解决方法
在计算机使用过程中,我们经常会遇到一些错误提示,其中之一就是“msvcp120.dll丢失”。这个错误通常会导致某些应用程序无法正常运行,给用户带来很大的困扰。那么,如何解决msvcp120.dll丢失的问题呢?本文将为大家介绍…...

源荷储再创新!小论文轻松发!基于雨流计数法的源-荷-储双层协同优化配置研究Matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。🍎 往期回顾关注个人主页:Matlab科研工作室👇 关注我领取海量matlab电子书和…...
)
conda简单安装介绍及基础使用(小白版)
目录 一、Conda 基础介绍 1.1 核心定位与两大能力 (1)包管理器(Package Manager) (2)环境管理器(Environment Manager) 1.2 关键特点 1.3 Conda vs Anaconda/Miniconda&#x…...

从零开始:手把手教你搭建与操作主流向量数据库
1. 为什么你需要一个向量数据库? 想象一下你正在开发一个智能相册应用。当用户上传一张猫咪照片时,系统需要从数百万张图片中快速找到所有相似的猫咪照片。传统数据库只能做精确匹配(比如"文件名cat001.jpg")࿰…...

BUUCTF-[GYCTF2020]FlaskApp 从SSTI到PIN码生成的完整利用链分析
1. SSTI漏洞基础与Flask应用风险 Flask作为轻量级Python Web框架,开发者常因模板渲染不当引发SSTI(服务器端模板注入)。我在实际测试中发现,当用户输入直接拼接到模板时,比如render_template_string(request.args.get(…...

AntiDupl.NET:彻底清理重复图片的终极免费解决方案
AntiDupl.NET:彻底清理重复图片的终极免费解决方案 【免费下载链接】AntiDupl A program to search similar and defect pictures on the disk 项目地址: https://gitcode.com/gh_mirrors/an/AntiDupl 你是否曾因电脑中堆积如山的重复照片而烦恼?…...

RAGFlow服务报错排查:如何快速解决429 Too Many Requests错误
RAGFlow服务429错误全链路诊断与高可用架构设计实战 第一次在RAGFlow日志里看到"HTTP 429 Too Many Requests"时,我正端着咖啡准备验收新上线的智能文档分析系统。监控大屏突然变红的那一刻,整个运维团队的手指都悬在了键盘上方——这个看似简…...

彩虹云发卡商城源码二开美化版
在数字商品交易领域,自动发卡系统已成为许多创业者和商家的首选工具。彩虹云发卡商城作为业内知名的开源解决方案,凭借其稳定性和灵活性赢得了广泛认可。而基于原版进行二次开发的美化版本,则在保持核心功能的基础上,进一步提升了…...

golang 开发环境搭建
环境变量 export GOROOT/usr/local/go export GOPATH$HOME/go export PATH$PATH:$GOROOT/bin:$GOPATH/bin打成Linux可执行的包 ## SET GOOSlinux SET GOARCHamd64 go build -o abc-demo-linux ....

突破付费墙限制:从技术原理到个性化解决方案的完整指南
突破付费墙限制:从技术原理到个性化解决方案的完整指南 当你在研究某个专业领域的前沿动态时,是否曾因遇到"订阅后阅读全文"的提示而被迫中断探索?在信息获取成本日益增加的今天,如何合法合规地突破内容访问限制&#x…...

快速解密Wii U NUS文件:CDecrypt工具的终极解决方案
快速解密Wii U NUS文件:CDecrypt工具的终极解决方案 【免费下载链接】cdecrypt Decrypt Wii U NUS content — Forked from: https://code.google.com/archive/p/cdecrypt/ 项目地址: https://gitcode.com/gh_mirrors/cd/cdecrypt 对于Wii U游戏开发者和模组…...