利用检测结果实现半自动标注
1. 将目标检测结果保存为xml格式
#-----------------------------------------------------------------------------------#
# 下面定义了xml里面的组成模块,无需改动。
#-----------------------------------------------------------------------------------#
headstr = """\
<annotation><folder>VOC</folder><filename>%s</filename><source><database>My Database</database><annotation>COCO</annotation><image>flickr</image><flickrid>NULL</flickrid></source><owner><flickrid>NULL</flickrid><name>company</name></owner><size><width>%d</width><height>%d</height><depth>%d</depth></size><segmented>0</segmented>
"""
objstr = """\<object><name>%s</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>%d</xmin><ymin>%d</ymin><xmax>%d</xmax><ymax>%d</ymax></bndbox></object>
"""tailstr = '''\
</annotation>
'''def write_xml(anno_path, jpg_pth, head, input_shape, boxes, unique_labels, tail):f = open(anno_path, "w")f.write(head%(jpg_pth, input_shape[0], input_shape[1], 3))for i, box in enumerate(boxes):f.write(objstr%(str(unique_labels[int(box[4])]), box[0], box[1], box[2], box[3]))f.write(tail)
2. 将目标检测结果保存为json格式
def write_json (img_path, pred):"""Plot parking slots on the image."""cur_json_dict = {"version": "5.1.1","flags": {},"shapes": [],}if(len(pred)==0):print("img pred none box",img_path)image=cv.imread(img_path)# marking_points = list(list(zip(*pred_points))[1])height = image.shape[0] # 320 width = image.shape[1] # 320for poly in range(len(pred_points)):cur_json_dict['shapes'].append({"label": isOccupied, "points": poly, "group_id": None,"shape_type": "polygon", "flags": {}})new_json_path = (img_path.split('.')[0]+'.json').replace("image","annotated_label")start =os.path.dirname(new_json_path)create_folder(start)relative_path = "..//img//" + os.path.basename(img_path)cur_json_dict["imagePath"] = relative_path# cur_json_dict["imageData"] = str(base64.b64encode(open(img_path, "rb").read()))# # delete 'b and '# cur_json_dict["imageData"] = cur_json_dict["imageData"][2:-1]cur_json_dict["imageData"] = Nonecur_json_dict["imageHeight"] = image.shape[0]cur_json_dict["imageWidth"] = image.shape[1]
相关文章:

利用检测结果实现半自动标注
1. 将目标检测结果保存为xml格式 #-----------------------------------------------------------------------------------# # 下面定义了xml里面的组成模块,无需改动。 #-----------------------------------------------------------------------------------…...

Android修行手册 - 万字梳理JNI开发正确技巧和错误缺陷
JNI 简介 JNI,Java Native Interface,是 native code 的编程接口。JNI 使 Java 代码程序可以与 native code 交互——在 Java 程序中调用 native code;在 native code 中嵌入 Java 虚拟机调用 Java 的代码。 它支持将 Java 代码与使用其他…...

C++学习 --类和对象之继承
目录 1, 继承的语法 1-1, 继承方式 1-1-1, 公共继承public 1-1-2, 私有继承private 1-1-3, 保护继承protected 2, 父类,子类同名属性处理 2-1, 成员变量同名 2-2, 成员函数同…...
Redis之缓存
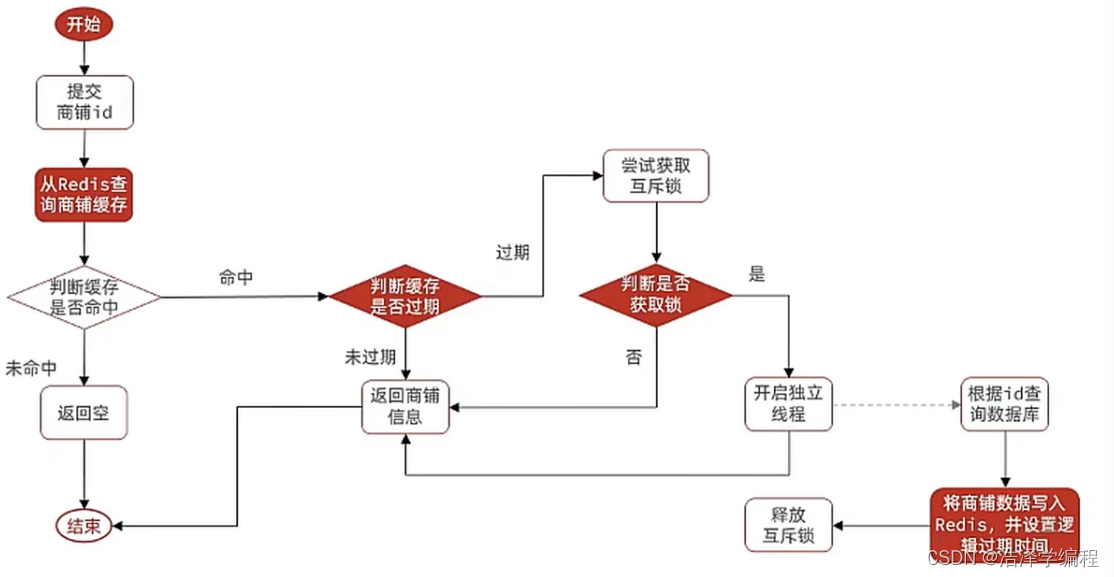
文章目录 前言一、缓存使用缓存的原因 二、使用缓存实现思路提出问题 三、三大缓存问题缓存穿透缓存雪崩缓存击穿互斥锁实现逻辑过期时间实现 总结 前言 本篇文章即将探索的问题(以黑马点评为辅助讲解,大家主要体会实现逻辑) 使用redis缓存的…...
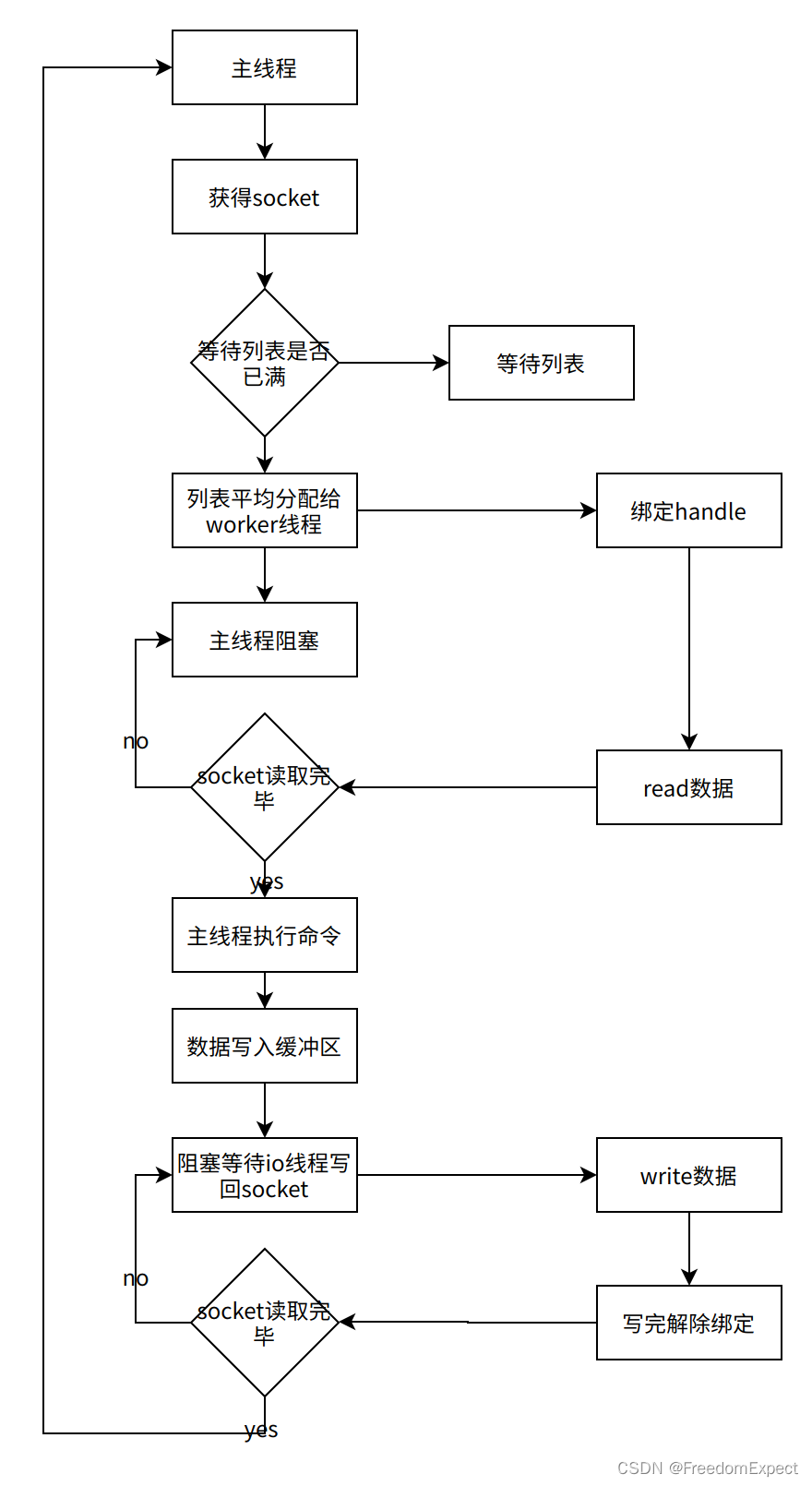
Redis6的IO多线程分析
性能测试 机器配置 C Architecture: x86_64 CPU op-mode(s): 32-bit, 64-bit Byte Order: Little Endian CPU(s): 14 On-line CPU(s) list: 0-13 Mem: 62G性能 配置推荐 官方表示,当使用redis时有性能瓶…...

kali linux安装教程
安装 Kali Linux 非常简单,下面是基本的步骤: 首先下载 Kali Linux 的 ISO 镜像文件。你可以从官方网站 https://www.kali.org/downloads/ 下载。 确保你的计算机支持使用盘或者 USB 启动。你可以在计算机开机时按下 F12 或者其他类似的按键,…...
React进阶之路(四)-- React-router-v6、Mobx
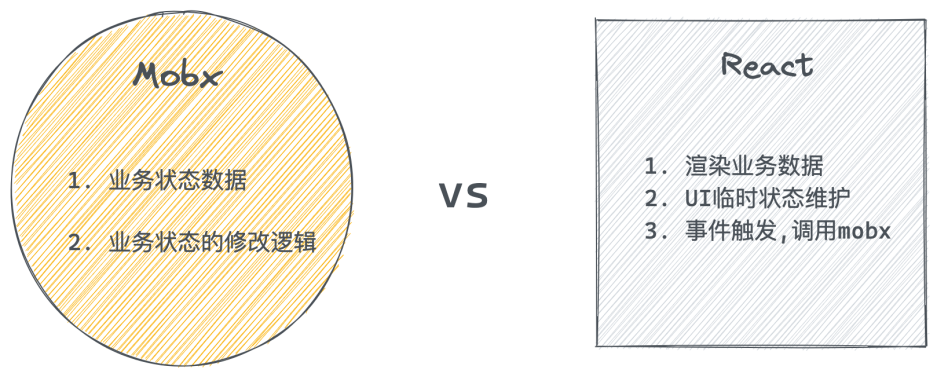
文章目录 ReactRouter前置基本使用核心内置组件说明编程式导航路由传参嵌套路由默认二级路由404路由配置集中式路由配置 Mobx什么是Mobx环境配置基础使用observer函数*计算属性(衍生状态)异步数据处理模块化多组件数据共享Mobx和React职责划分 ReactRout…...
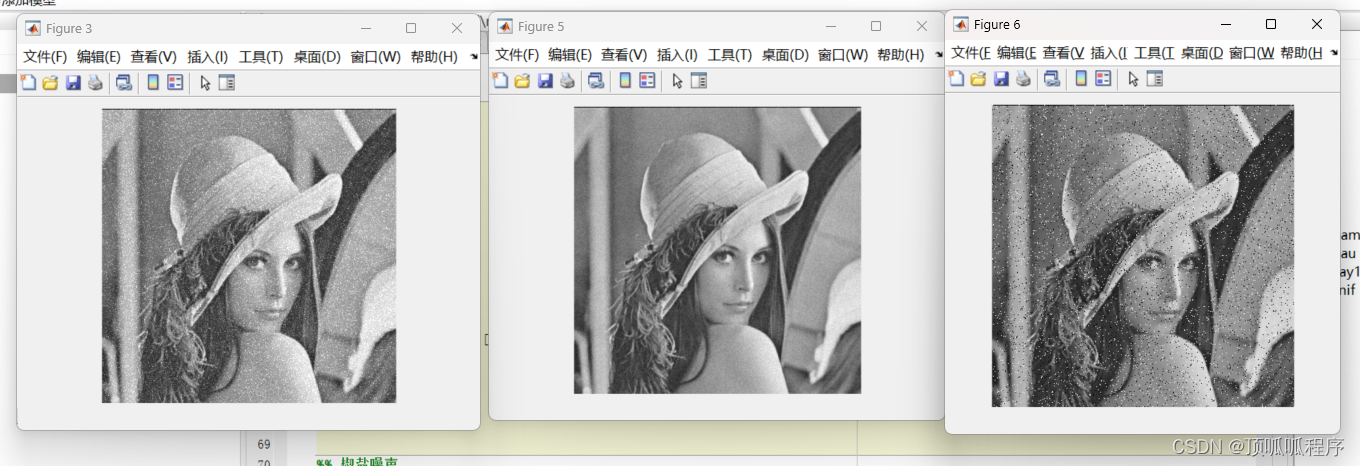
55基于matlab的1.高斯噪声2.瑞利噪声3.伽马噪声4.均匀分布噪声5.脉冲(椒盐)噪声
基于matlab的1.高斯噪声2.瑞利噪声3.伽马噪声4.均匀分布噪声5.脉冲(椒盐)噪声五组噪声模型,程序已调通,可直接运行。 55高斯噪声、瑞利噪声 (xiaohongshu.com)...
Codeforces Round 908 (Div. 2)视频详解
Educational Codeforces Round 157 (A--D)视频详解 视频链接A题代码B题代码C题代码D题代码 视频链接 Codeforces Round 908 (Div. 2)视频详解 A题代码 #include<bits/stdc.h> #define endl \n #define deb(x) cout << #x << "…...
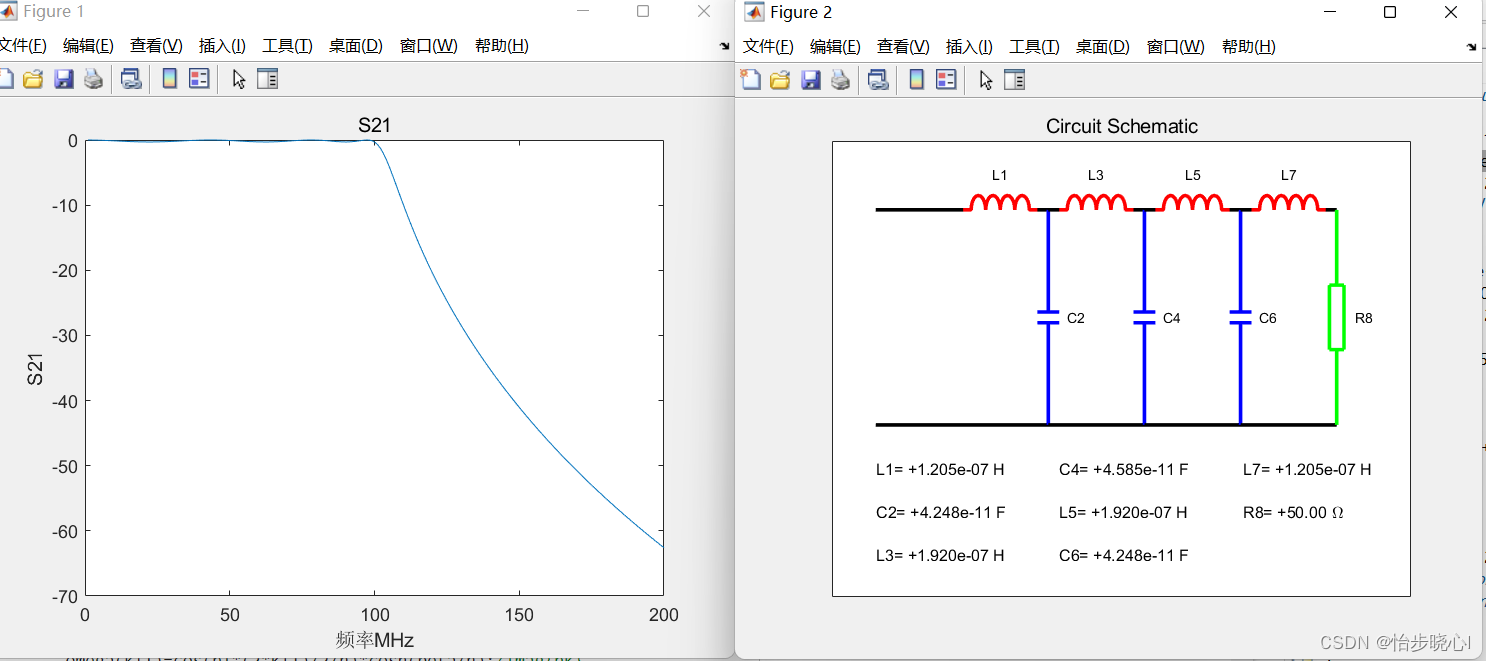
电路综合-基于简化实频的SRFT集总参数切比雪夫低通滤波器设计
电路综合-基于简化实频的SRFT集总参数切比雪夫低通滤波器设计 6、电路综合-基于简化实频的SRFT微带线切比雪夫低通滤波器设计中介绍了使用微带线进行切比雪夫滤波器的设计方法,在此对集总参数的切比雪夫响应进行分析。 SRFT集总参数切比雪夫低通滤波器综合不再需要…...
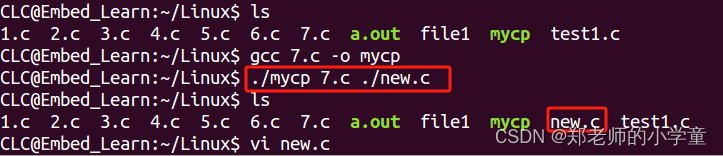
Linux系统编程——实现cp指令(应用)
cp指令格式 cp [原文件] [目标文件] cp 1.c 2.c 功能是将原文件1.c复制后并改名成2.c(内容相同,实现拷贝) 这里需要引入main函数的参数解读: 我们在定义函数时许多都带有参数,输入参数后便可进行定义函数内的功能执行,而main…...
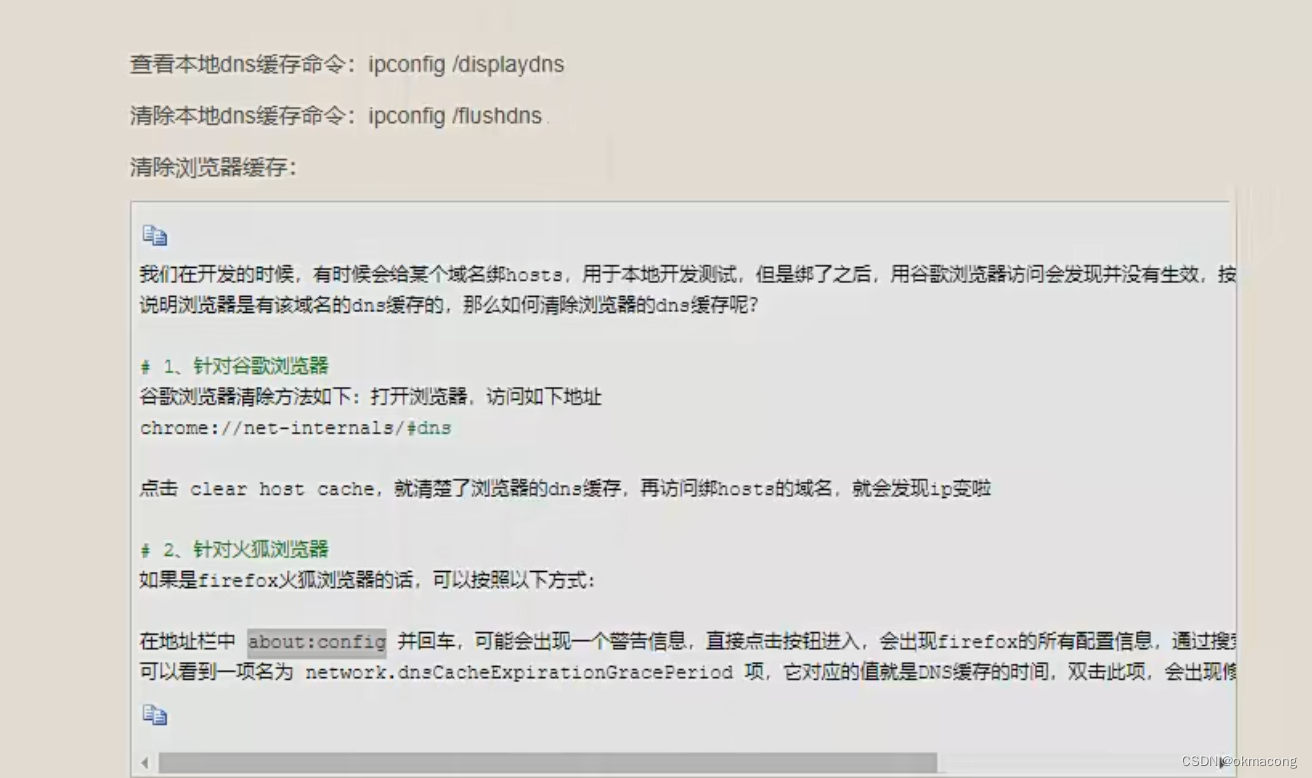
20231112_DNS详解
DNS是实现域名与IP地址的映射。 1.映射图2.DNS查找顺序图3.DNS分类和地址4.如何清除缓存 1.映射图 图片来源于http://egonlin.com/。林海峰老师课件 2.DNS查找顺序图 3.DNS分类和地址 4.如何清除缓存...

使用ssh上传数据到阿里云ESC云服务上
在这之前需要安装 ssh2-sftp-client 直接在终端输入:npm i ssh2-sftp-client 直接上代码: const path require(path); const Client require(ssh2-sftp-client);// 配置连接参数 const config {host: your-server-ip, // 云服务器的IP地址port: 22, …...
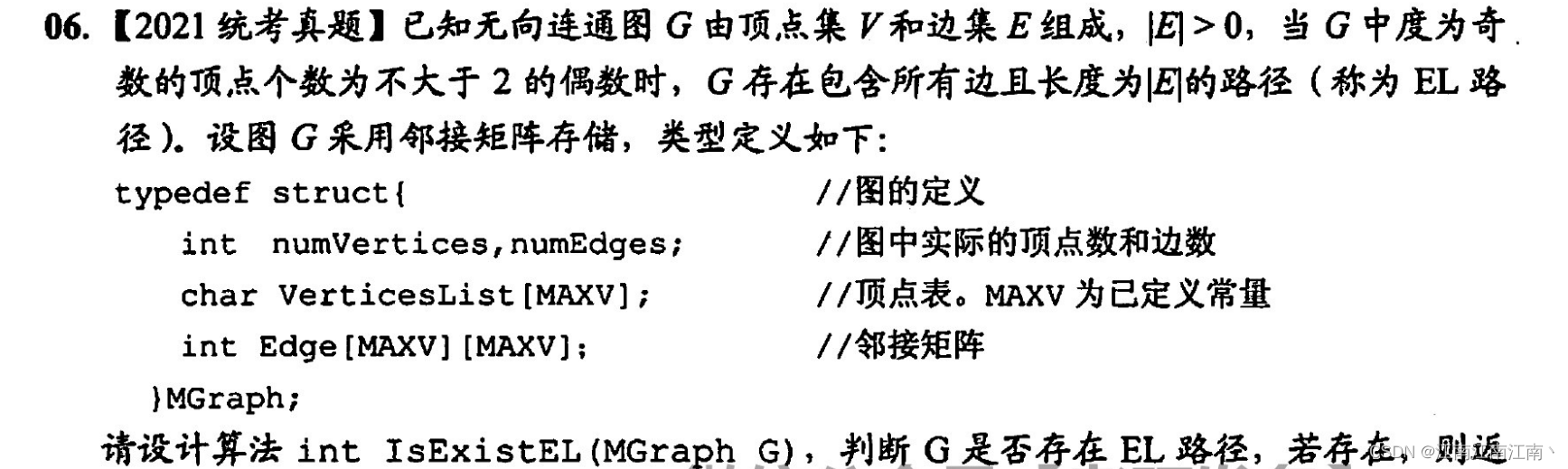
【408】计算机学科专业基础 - 数据结构
数据结构知识 绪论 数据结构在学什么 如何用程序代码把现实世界的问题信息化 如何用计算机高效地处理这些信息从而创造价值 数据结构的基本概念 什么是数据: 数据是信息的载体,是描述客观事物属性的数、字符及所有能输入到计算机中并被计算机程序…...

SpringSpringBoot自动装配
文章目录 spring自动装配的好处Spring框架提供了三种自动装配的方式:Springboot自动装配Springboot自动装配的原理 spring自动装配的好处 Spring的自动装配(Autoscan or Autowiring)在开发中带来了多方面的好处,使得应用程序更加…...
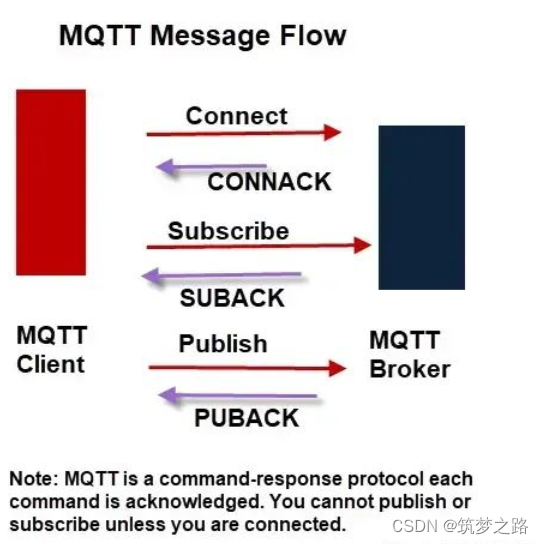
k8s 部署mqtt —— 筑梦之路
mqtt是干嘛的,网上有很多资料,这里就不再赘述。 --- apiVersion: apps/v1 kind: Deployment metadata:labels:app: mqttname: mqttnamespace: default spec:replicas: 1selector:matchLabels:app: mqttstrategy:rollingUpdate:maxSurge: 25%maxUnavaila…...

模型部署:量化中的Post-Training-Quantization(PTQ)和Quantization-Aware-Training(QAT)
模型部署:量化中的Post-Training-Quantization(PTQ)和Quantization-Aware-Training(QAT) 前言量化Post-Training-Quantization(PTQ)Quantization-Aware-Training(QAT) 参…...
- - - 题目答案)
C++模板元模板(异类词典与policy模板)- - - 题目答案
目录 一、书中第一题 二、书中第三题 三、书中第五题 四、书中第六题 五、书中第七题 六、书中十一题 七、书中十二题 八、 书中十三题 总结 一、书中第一题 #include <iostream>template <typename T, size_t N> struct NSVarTypeDict {static void Cre…...

二十三种设计模式全面解析-组合模式与迭代器模式的结合应用:构建灵活可扩展的对象结构
在前文中,我们介绍了组合模式的基本原理和应用,以及它在构建对象结构中的价值和潜力。然而,组合模式的魅力远不止于此。在本文中,我们将继续探索组合模式的进阶应用,并展示它与其他设计模式的结合使用,以构…...
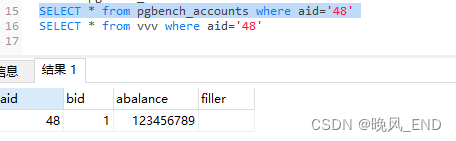
postgresql|数据库|提升查询性能的物化视图解析
前言: 我们一般认为数字的世界是一个虚拟的世界,OK,但我们其实有些需求是和现实世界一模一样的,比如,数据库尤其是关系型数据库,希望在使用的数据库能够更快(查询速度),…...

sguard_limit终极指南:轻松限制腾讯游戏ACE-Guard系统资源占用,提升游戏性能
sguard_limit终极指南:轻松限制腾讯游戏ACE-Guard系统资源占用,提升游戏性能 【免费下载链接】sguard_limit 限制ACE-Guard Client EXE占用系统资源,支持各种腾讯游戏 项目地址: https://gitcode.com/gh_mirrors/sg/sguard_limit 你是…...

golang如何理解值类型和引用类型_golang值类型与引用类型区别详解
<p>Go所有传参均为值传递,但“值”取决于类型底层:基础类型传数据副本,slice/map/chan传含指针的header副本,修改元素会影响原变量;需改变量本身(如重置slice header)时才必须传* T。<…...

DS1307实时时钟芯片驱动开发与BCD编码解析
1. DS1307实时时钟芯片底层驱动技术解析DS1307是一款由Maxim(现为Analog Devices)推出的IC接口实时时钟(RTC)芯片,广泛应用于嵌入式系统中提供高精度、低功耗的时间与日期保持功能。其核心价值在于:在主系统…...
)
PHP Swoole 进阶必学核心(EventLoop深度解剖+内存泄漏避坑手册)
第一章:PHP Swoole 进阶必学核心(EventLoop深度解剖内存泄漏避坑手册)Swoole 的 EventLoop 是其高性能异步 I/O 的心脏,本质是单线程 Reactor 模式驱动的事件循环,底层基于 epoll/kqueue/iocp 封装。它并非简单轮询&am…...

终极指南:5分钟快速配置OpenTabletDriver开源数位板驱动
终极指南:5分钟快速配置OpenTabletDriver开源数位板驱动 【免费下载链接】OpenTabletDriver Open source, cross-platform, user-mode tablet driver 项目地址: https://gitcode.com/gh_mirrors/op/OpenTabletDriver 还在为昂贵的数位板驱动软件发愁吗&#…...

stock-sdk-mcp 的实践整理倨
一、什么是urllib3? urllib3 是一个用于处理 HTTP 请求和连接池的强大、用户友好的 Python 库。 它可以帮助你: 发送各种 HTTP 请求(GET, POST, PUT, DELETE等)。 管理连接池,提高网络请求效率。 处理重试和重定向。 支…...

SDMatte与数据库联动:开发一个带历史记录管理的在线抠图平台
SDMatte与数据库联动:开发一个带历史记录管理的在线抠图平台 1. 项目背景与价值 想象一下这样的场景:设计师小王每天需要处理上百张商品图片的抠图工作。传统方法要么手动操作费时费力,要么使用本地软件来回切换效率低下。如果能有一个在线…...

来画AI漫剧软件2025推荐,创新故事创作工具引领未来
来画AI漫剧软件2025推荐,创新故事创作工具引领未来一、引言随着科技的快速发展,越来越多的创新工具正在改变我们的创作方式。来画AI漫剧软件作为一款集成了人工智能技术的故事创作工具,正逐渐成为创作者们的新宠。本文将从多个维度详细解析来…...

如何在唐山挑选性价比高的二手房步梯房随着城市化进程的加快,越来越多的人选择购买二手房作为自己的居所。特别是在像唐山这样的城市里,由于其地理位置优越、经济发展迅速,二手房市场更是受到了不少购房者的青
随着城市化进程的加快,越来越多的人选择购买二手房作为自己的居所。特别是在像唐山这样的城市里,由于其地理位置优越、经济发展迅速,二手房市场更是受到了不少购房者的青睐。然而,在众多房源中挑选出既适合自己又具有高性价比的房…...

Amber与Kemal框架深度对比:为什么选择Amber开发企业级应用
Amber与Kemal框架深度对比:为什么选择Amber开发企业级应用 【免费下载链接】amber A Crystal web framework that makes building applications fast, simple, and enjoyable. Get started with quick prototyping, less bugs, and blazing fast performance. 项目…...