ROS基础—vscode创建工作空间
1、创建ROS工作空间
首先打开ubuntu的终端,接着依次输入如下的命令行;
mkdir -p xxx_ws/src(必须得有 src)
cd xxx_ws
catkin_make
当然我一般是新建一个叫做demo的工作空间,如 mkdir -p demo04_ws/src
2、启动vscode
cd xxx_ws
code .3、vscode 中编译 ros
一开始这个工作空间下只有bulid,devel,src这三个文件夹,在使用快捷键 ctrl + shift + B 后便会出现.vscode文件夹,点击进入.vscode文件夹下的tasks.json文件,修改.vscode/tasks.json 文件。即是将文件下的代码替换为一下代码即可。
{
// 有关 tasks.json 格式的文档,请参见// https://go.microsoft.com/fwlink/?LinkId=733558"version": "2.0.0","tasks": [{"label": "catkin_make:debug", //代表提示的描述性信息"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行"command": "catkin_make",//这个是我们需要运行的命令"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”"group": {"kind":"build","isDefault":true},"presentation": {"reveal": "always"//可选always或者silence,代表是否输出信息},"problemMatcher": "$msCompile"}]
}
4、 创建 ROS 功能包
选定 src 右击 ---> create catkin package
之后自己输入包名,而后添加依赖项:roscpp rospy std_msgs
5、在功能包的 src 下新建 cpp /py文件(注意一定是在功能包的src下新建文件)
cpp文件:
#include "ros/ros.h"int main(int argc, char *argv[])
{/* code */return 0;
}PS1: 如果没有代码提示
修改 .vscode/c_cpp_properties.json
设置 "cppStandard": "c++17"
PS2: main 函数的参数不可以被 const 修饰
PS3: 当ROS__INFO 终端输出有中文时,会出现乱码
INFO: ????????????????????????
解决办法:在函数开头加入下面代码的任意一句(推荐选择第二句代码)
setlocale(LC_CTYPE, "zh_CN.utf8");
setlocale(LC_ALL, "");
py文件:
在 功能包 下新建 scripts 文件夹,添加 python 文件,并添加可执行权限:终端下进入 scripts 执行:chmod +x *.py
import rospy
from std_msgs.msg import Stringif __name__ == "__main__":6、配置在功能包下的CMakeLists.txt文件
C++ 配置:
add_executable(节点名称src/C++源文件名.cpp
)
target_link_libraries(节点名称${catkin_LIBRARIES}
)
节点名称一般用C++源文件名会方便些。
Python 配置:
catkin_install_python(PROGRAMS scripts/自定义文件名.pyDESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
7、执行
1、Crtl+shit+B编译cpp/py文件
2、打开一个新的终端输入roscore启动roscore
3、再打开一个新的终端输入
source ./devel/setup.bash
rosrun 功能包名 c++节点/自定义文件名.pyPS:
如果不编译直接执行 python 文件,会抛出异常。
1.第一行解释器声明,可以使用绝对路径定位到 python3 的安装路径 #! /usr/bin/python3,但是不建议
2.建议使用 #!/usr/bin/env python 但是会抛出异常 : /usr/bin/env: “python”: 没有那个文件或目录
3.解决1: #!/usr/bin/env python3 直接使用 python3 但存在问题: 不兼容之前的 ROS 相关 python 实现
4.解决2: 打开ubuntu终端进入(cd)到工作空间创建一个链接符号到 python 命令:sudo ln -s /usr/bin/python3 /usr/bin/python(推荐使用)
相关文章:

ROS基础—vscode创建工作空间
1、创建ROS工作空间 首先打开ubuntu的终端,接着依次输入如下的命令行; mkdir -p xxx_ws/src(必须得有 src) cd xxx_ws catkin_make当然我一般是新建一个叫做demo的工作空间,如 mkdir -p demo04_ws/src 2、启动vscode cd xxx_ws code . …...
)
机器学习复习(待更新)
01绪论 (1)机器学习基本分类: 监督学习(有标签)半监督学习(部分标签,找数据结构)无监督学习(无标签,找数据结构)强化学习(不断交互&…...
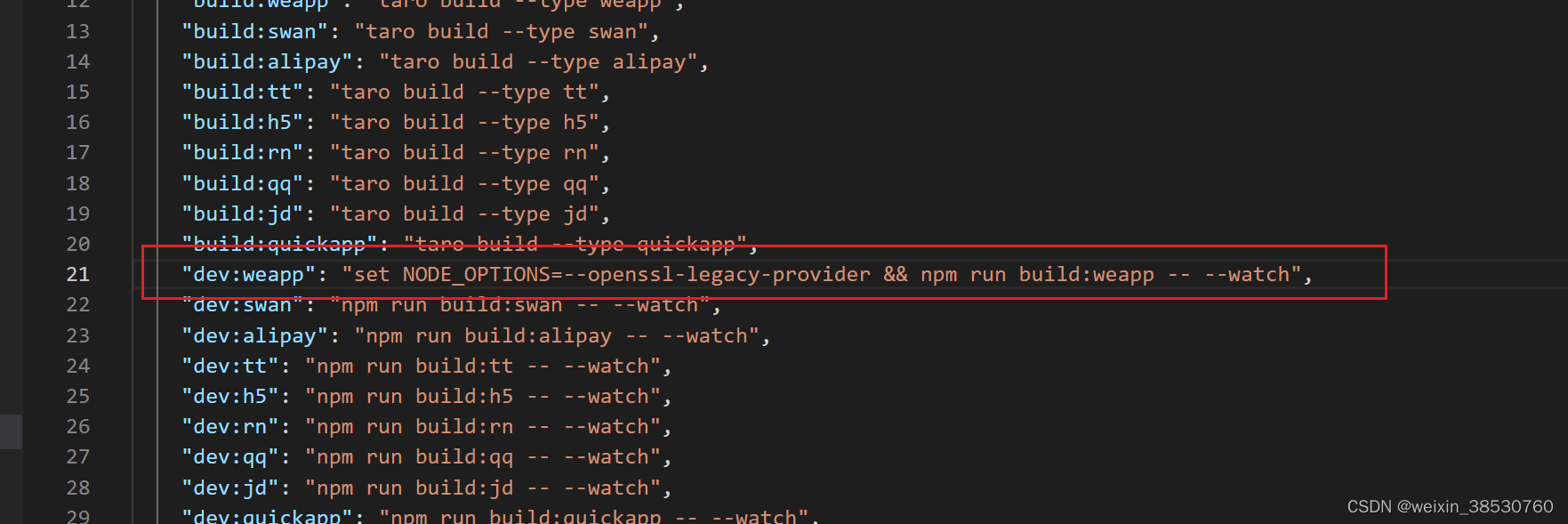
taro(踩坑) npm run dev:weapp 微信小程序开发者工具预览报错
控制台报错信息: VM72:9 app.js错误: Error: module vendors-node_modules_taro_weapp_prebundle_chunk-JUEIR267_js.js is not defined, require args is ./vendors-node_modules_taro_weapp_prebundle_chunk-JUEIR267_js.js 环境: node 版本&#x…...

3. 深度学习——损失函数
机器学习面试题汇总与解析——损失函数 本章讲解知识点 什么是损失函数?为什么要使用损失函数?详细讲解损失函数本专栏适合于Python已经入门的学生或人士,有一定的编程基础。 本专栏适合于算法工程师、机器学习、图像处理求职的学生或人士。 本专栏针对面试题答案进行了优化…...

交叉编译 openssl
要在 x86 平台上编译适用于 aarch64 架构的 OpenSSL 动态库,你需要使用交叉编译工具链。可以按照以下步骤进行: 安装 aarch64 交叉编译工具链: $ sudo apt-get install gcc-aarch64-linux-gnu g-aarch64-linux-gnu 这将安装 aarch64 交叉编…...

C++文件的读取和写入
1、C对txt文件的读,ios::in #include<iostream> #include<fstream> using namespace std;int main() {ifstream ifs;ifs.open("test.txt",ios::in);if(!ifs.is_open()){cout<<"打开文件失败!"<<endl;}char…...

住宅IP、家庭宽带IP以及原生IP,它们有什么区别?谷歌开发者账号应选择哪种IP?
IP地址(Internet Protocol Address)是互联网协议地址的简称,是互联网通信的基础,互联网上每一个网络设备的唯一标识符每个在线的设备都需要一个IP地址,这样才能在网络中找到它们并进行数据交换。 IP地址有很多种类型&…...
--内存管理之I/O交换与性能调优)
Linux内核分析(十三)--内存管理之I/O交换与性能调优
目录 一、引言 二、page cache ------>2.1、file-backed ------>2.2、匿名页(Anonymous page) ------>2.3、读写方式 ------>2.4、常驻内存 三、页面回收 ------>3.1、LRU算法 ------>3.2、嵌入式系统的zRAM 四、内存性能调优 ------>4.1、存储…...

前端使用webscoket
前端 <template><div class"wrap"><button click"socketEmit">连接Socket</button><button click"socketSendmsg">发送数据</button></div> </template><script> export default {data(…...

centos安装Git
一开始使用yum -y install git出来的版本比较低。 1.yum安装gityum -y install git 2.查看git的版本git --version 3.删除git(版本过低)yum remove -y git 后来通过源码编译后安装: 使用安装包安装: 1.下载安装包:h…...
网络编程 初探windows编程
目录 一、什么是Winodws编程 二、开发环境搭建以及如何学习 三、VA助手安装 四、第一个Win32程序 五、窗口类句柄/窗口类对象 六、Winodws消息循环机制 七、Windows数据类型 一、什么是Winodws编程 Windows 编程指的是在 Microsoft Windows 操作系统上进行软件开发的过…...
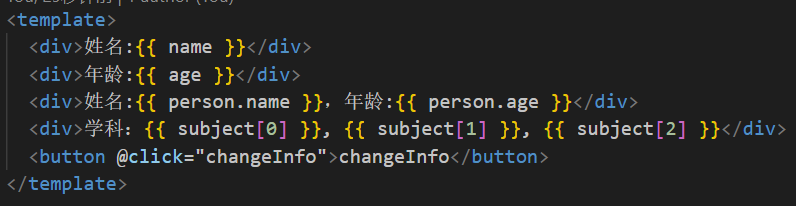
Vue3 ref函数和reactive函数
一、ref函数 我们在setup函数中导出的属性和方法虽然能够在模板上展示出来,但是并没有给属性添加响应式,因此,我们需要使用ref函数来为我们的数据提供响应式。 (一)引入ref函数 import { ref } from "vue"…...

docker常用命令详解
1. Image常见操作 (1)查看本地image列表 docker images docker image ls (2)获取远端镜像 docker pull (3)删除镜像[注意此镜像如果正在使用,或者有关联的镜像,则需要先处理完] docker image rm imageid docker rmi -f imageid docker rmi -f $(docker …...

采集Prestashop独立站采集Prestashop独立站
import java.net.URL 这一行导入了Java.net包中的URL类,这个类在处理URL链接时非常有用。 import org.jsoup.Jsoup 这一行导入了Jsoup库,它是一个强大的HTML和XML文档解析库,我们可以使用它来解析网页内容。 import org.jsoup.nodes.Docume…...
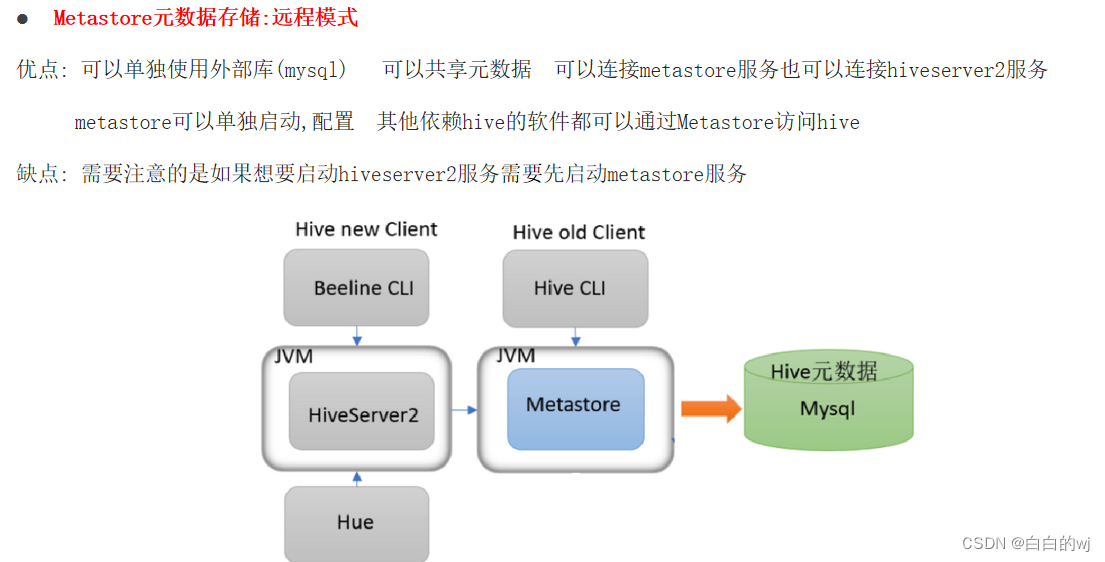
2023.11-9 hive数据仓库,概念,架构,元数据管理模式
目录 0.数据仓库和数据库 数据仓库和数据库的区别 数据仓库基础三层架构 一.HDFS、HBase、Hive的区别 二.大数据相关软件 三. Hive 的优缺点 1)优点 2)缺点 四. Hive 和数据库比较 1)查询语言 2)数据更新 3)…...
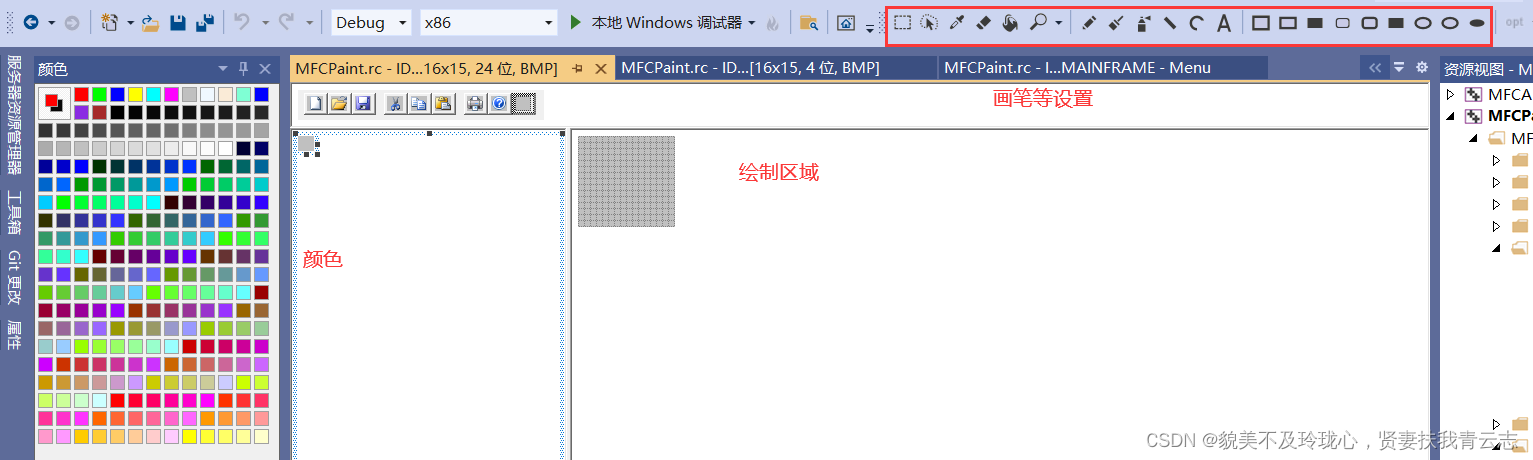
MFC 简单绘图与文本编辑
目录 一.创建单文档项目 二.消息映射机制 三.WM_PAINT消息触发 四.CVIEW类 五.设备上下文 六.资源类和资源的关系 七.画线,矩形 八.画布 九.画笔 十.画刷 十一.利用TRACE打印日志 十二.文本编程 十三.ID号 十四.菜单栏 十五.菜单命令路由 十六.工具…...

C# 中的 SerialPort
简介 C# 中的 SerialPort 类提供了对串行端口(如 COM 端口)进行通信的功能。通过 SerialPort 类,你可以打开、关闭端口,读取和写入数据以及设置通信参数等。下面是对 SerialPort 类的一些详细解释: 创建 SerialPort 对…...

2022年06月 Python(五级)真题解析#中国电子学会#全国青少年软件编程等级考试
Python等级考试(1~6级)全部真题・点这里 一、单选题(共25题,每题2分,共50分) 第1题 Python中 print(“八进制{: o}”.format(12)) 正确的输出结果是?( ) A: 八进制:O B: 八进制:O14 C: 八进制14O D: 八进制14 答案:D 字符串的format()格式。 第2题 下列的程…...

YOLO图像识别
YOLO(you only look once),指只需要浏览一次就可以识别出图中的物体的类别和位置。 也因为只需要看一次,YOLO被称为Region-free方法,相比于Region-based方法,YOLO不需要提前找到可能存在目标的Region。 与…...
2023NewStarCTF
目录 一、阳光开朗大男孩 二、大怨种 三、2-分析 四、键盘侠 五、滴滴滴 六、Include? 七、medium_sql 八、POP Gadget 九、OtenkiGirl 一、阳光开朗大男孩 1.题目给出了secret.txt和flag.txt两个文件,secret.txt内容如下: 法治自由公正爱国…...

SEO排名培训对个人和企业有什么区别
SEO排名培训对个人和企业的不同影响 在当今数字化时代,搜索引擎优化(SEO)已成为提升网络曝光度的关键手段。无论是个人博主、自由职业者,还是中小企业,SEO排名培训都能带来显著的效益。SEO排名培训对个人和企业的具体…...

Workbench网格划分实战指南:从基础到进阶技巧
1. Workbench网格划分入门:为什么选择它? 如果你是第一次接触Workbench的网格划分功能,可能会好奇为什么这么多工程师选择它。简单来说,Workbench提供了一个可视化操作界面,让复杂的网格划分变得像搭积木一样直观。我刚…...

拓朋N86公网车载台:邮政分拣车高效协同的通信保障
在繁忙的邮政包裹分拣中心,效率与协同是每辆分拣车与调度人员最为关心的两大要素。在这样一片高速运转而充满挑战的天地里,拓朋N86公网集群车载台以其出色的性能,悄然成为了分拣车队的隐形指挥中枢。 全国覆盖,沟通无阻 分拣中心往…...

Helloagents-13travel agent学习笔记
承接上文Helloagents-13.智能旅行助手学习笔记 _helloagents旅游项目-CSDN博客 1.全链路架构梳理 1. 订单接入(用户输入 -> 后端接收) 前端 (Vue): 用户在网页上填好目的地(如“悉尼”)、天数、出发日期等&#x…...

从配置到实战:基于快马生成keil5双环境下的c51与stm32传感器驱动对比项目
在实际嵌入式开发中,经常需要在不同架构的MCU之间切换或协作。最近我在做一个温湿度监测项目,需要在STC89C52(C51架构)和STM32F103C8T6(ARM架构)上分别实现DHT11传感器的驱动。通过这个实战项目,…...

FreeRTOS在STM32上的内存管理:如何避免堆溢出和优化内存使用
FreeRTOS在STM32上的内存管理实战:从堆溢出防御到高效优化策略 在嵌入式开发中,内存管理往往是决定系统稳定性的关键因素。对于使用FreeRTOS的STM32开发者而言,如何合理配置内存、预防堆溢出以及优化内存使用,直接关系到产品的可…...

面试复盘之WHERE和HAVING的区别以及MySQL的索引
where是在数据分组之前进行过滤执行流程 FROM → WHERE → GROUP BY → HAVING → SELECT → ORDER BY示例 SELECT * FROM employee WHERE salary > 5000;含义:先从表中筛选出 salary > 5000 的记录,再返回结果。 HAVING 关键字 HAVING 的作用…...

单电阻采样 基于单电阻采样的相电流重构算法 keil完整工程。 单电阻采样 f103的单电阻...
单电阻采样 基于单电阻采样的相电流重构算法 keil完整工程。 单电阻采样 f103的单电阻,完整工程,带文档,带硬件资料。 f3平台的单电阻完整工程,代码详细注释。 还有微芯的单电阻smo代码加文档 具体如截图请看下一、工程概述 本工程…...

vector收尾
vector深度剖析及模拟实现使用memcpy拷贝问题int main() { bite::vector<bite::string> v; v.push_back("1111"); v.push_back("2222"); v.push_back("3333"); return 0; }问题分析: memcpy是内存的二进制格式拷贝,…...

从 MSYS2 环境中提取独立 MinGW-w64 工具链的技术方案
提取包下载:作者主页资源 一、问题背景 在配置 Windows 平台 C/C 开发环境时,开发者可能误将 MSYS2 完整环境当作 MinGW-w64 编译器套件下载安装。MSYS2 是一个集成了 Pacman 包管理器的 Unix-like 开发环境,其内部包含了完整的 MinGW-w64 工…...