RISC-V处理器设计(五)—— 在 RISC-V 处理器上运行 C 程序
目录
一、前言
二、从 C 程序到机器指令
三、实验
3.1 实验环境
3.11 Windows 平台下环境搭建
3.12 Ubuntu 平台下环境搭建
3.13 实验涉及到的代码或目录
3.2 各文件作用介绍
3.2.1 link.lds
3.2.2 start.S
3.2.3 lib 和 include 目录
3.2.4 common.mk
3.2.5 demo 目录
3.3 上板测试
第一种:直接作为 FPGA 比特流的一部分下载到板子上。
第二种:使用串口烧录程序。
四、写在最后
文章目录
RISC-V处理器的设计与实现(一)—— 基本指令集_Patarw_Li的博客-CSDN博客
RISC-V处理器的设计与实现(二)—— CPU框架设计_Patarw_Li的博客-CSDN博客
RISC-V处理器的设计与实现(三)—— 上板验证_Patarw_Li的博客-CSDN博客
RISC-V处理器设计(四)—— Verilog 代码设计-CSDN博客
RISC-V处理器设计(五)—— 在 RISC-V 处理器上运行 C 程序-CSDN博客
一、前言
前面我们使用 verilog 完成了一个 risc-v cpu 的设计,但 cpu 最终也是为了程序服务的,不能执行程序的 cpu 没有任何意义。所以这一节我们要研究如何在自己设计的 cpu 上运行 C 程序。项目仓库如下:
risc-v-cpu: 一个基于 RISC-V 指令集的 CPU 实现(成功移植到野火征途 PRO 开发板),以及从零开始写一个基于 RISC-V 的 RT-Thread~ - Gitee.com
本节涉及到的代码都在仓库的 rt-thread 目录下。
二、从 C 程序到机器指令
当然,cpu 肯定不能直接执行 C 程序,cpu 只能识别机器语言,机器语言就是由 0 和 1 组成的一条二进制序列,比如 ADD 指令有如下格式:

在确定 rs1、rs2、rd 三个寄存器后,就能确定 ADD 指令的二进制序列,cpu 能够识别并执行这个二进制序列。 risc-v 指令集相关内容可以看我的这篇文章:
RISC-V处理器的设计与实现(一)—— 基本指令集_risc_v-CSDN博客
那么我们如何从 C 程序得到我们想要的机器指令呢?答案就是使用编译器,编译分为如下四个阶段(程序从编译到运行-CSDN博客):
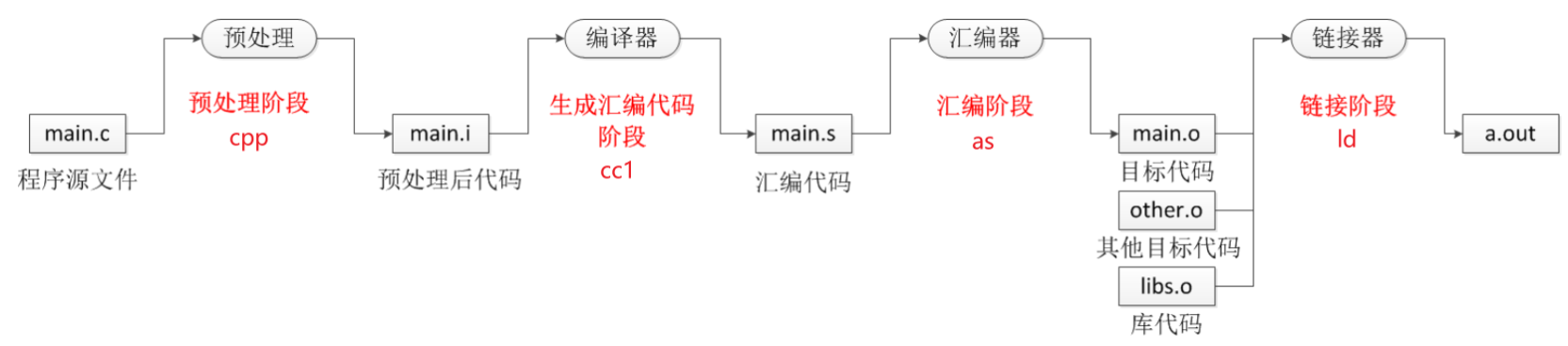
即预处理阶段、生成汇编代码阶段、汇编阶段、链接阶段,你可能会问为什么图里面的编译器只参与了一个阶段的工作,这是因为现在的编译工具功能非常强大,比如 linux 下的 gcc,我们只需要一行指令就能帮我们完成四个阶段的操作:
gcc hello.c最终生成的 a.out 即为操作系统(如 Linux、Ubuntu)上的可执行程序,此时的 a.out 虽然能在 像 Linux 这种操作系统上运行,但是 cpu 并不能直接识别并运行,编译生成的 a.out 大多是 ELF 格式。
ELF 格式的可执行文件包含了很多 cpu 不能识别的信息,但像 Linux 这样的操作系统可以识别这些信息,比如判断该可执行文件可以在哪种架构上运行,该可执行文件的各个段的位置在哪等等。关于 ELF 文件的解析可以看如下博客:
ELF文件详解—初步认识-CSDN博客
为了得到 cpu 能直接识别的内容,我们可以通过 objcopy 指令将生成的 a.out 转变为去掉了这些无用信息的 hello.bin 文件,具体怎么操作可以看我的这篇博客:
开发一个RISC-V上的操作系统(一)—— 环境搭建_riscv操作系统开发_Patarw_Li的博客-CSDN博客
同时,如果要编译出我们 risc-v 架构的 cpu 能识别的机器指令,我们还需要选择对应的交叉编译器,如 Ubuntu 20.04 下可以使用官方提供的 riscv64-unknown-elf-gcc。如果你使用的是 x86 下的gcc,那么编译出来的机器指令则只能由 x86 架构的 cpu 识别。
三、实验
实验的目录在本仓库的 rt-thread 目录下,该目录下新增了一个 demo 目录,可供用户自己设计 C 程序到本 cpu 上运行。其他的 experiment 目录都是和 rt-thread 移植相关的,后续也会更新相应的文章。
3.1 实验环境
下面是两种平台下的编译环境搭建,大家可以根据自己的情况自行选择。
3.11 Windows 平台下环境搭建
- GNU 工具链(链接:https://pan.baidu.com/s/1Bdmn-FH0T7ekm2kMxkzJTw?pwd=qn69 提取码:qn69),百度云下载解压后,将 bin 目录添加到环境变量里即可。
- make 工具(链接:https://pan.baidu.com/s/1X-F1BVPMa3-B-V1EHB4tEQ?pwd=418d 提取码:418d),百度云下载解压后,将 bin 目录添加到环境变量里即可。
- Python 3.7
3.12 Ubuntu 平台下环境搭建
Ubuntu 版本:
$ lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 20.04.2 LTS
Release: 20.04
Codename: focal$ uname -r
5.15.0-76-generic安装Ubuntu 20.04官方提供的 GNU工具链:
sudo apt update
sudo apt install build-essential gcc make perl dkms git gcc-riscv64-unknown-elf并且要将 Makefile 里面的 include ../common.mk 修改为 include ../common_ubuntu.mk。
3.13 实验涉及到的代码或目录
- include:公共头文件目录;
- lib:公共函数目录;
- start.S:启动文件;
- link.lds:链接脚本;
- common.mk:Makefile 的公共部分(Windows 平台下);
- common_ubuntu.mk:Makefile 的公共部分(Ubuntu 平台下);
- demo:用户可以在本目录下编写能在本 CPU 上运行的 C 程序;
3.2 各文件作用介绍
3.2.1 link.lds
link.lds 被称为链接脚本,是编译器链接步骤的重要部分。 官方文档
链接操作都是由链接脚本(Linker Script)所控制的,按照官方的话来说,链接脚本用来描述 input file(比如 hello.c 和 printf.c,编译器会将他们分别编译成 hello.o 和 printf.o,这两个文件就是链接操作的输入)中的每个 section 应该如何被映射到 output file(最终生成的可执行文件)中,并且控制 output file 中的内存布局。
我们可以自己编写链接脚本,也可以使用默认的链接脚本,如果要使用自己编写的链接脚本,则需要在编译时使用 -T 参数来指定。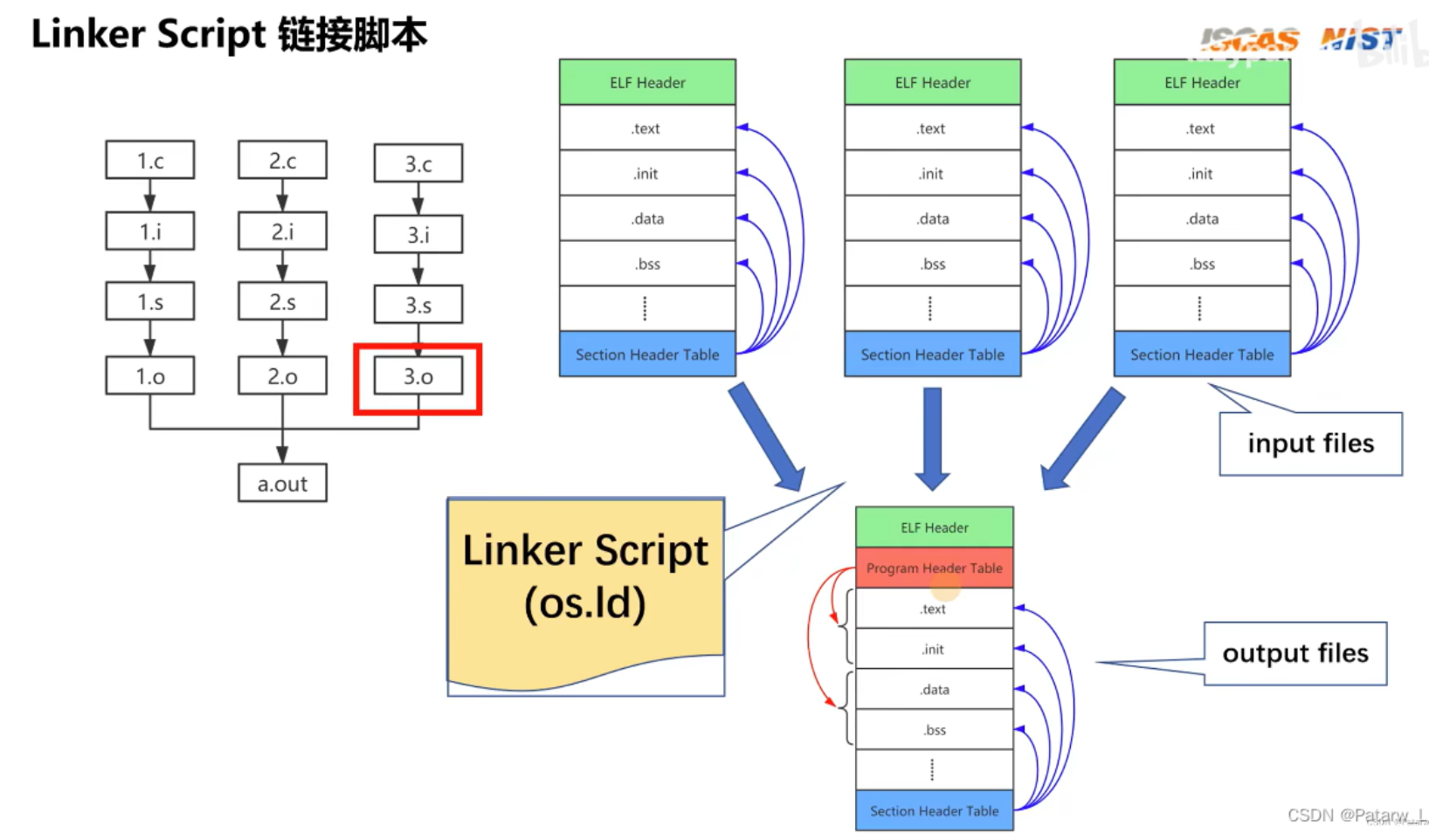
关于链接脚本的语法大家可以自行查阅资料,这里我只介绍对于本次实验比较重要的部分:
1. ENTRY 来确定程序的入口为 _start,该符号在 start.S 中声明:
ENTRY(_start)2. MEMORY 部分,这部分是根据 soc 上的 flash 和 ram 在总线上的起始地址以及所支持的空间大小来配置的。比如本 cpu 的 rom 起始地址为 0x00000000,大小为 16KB:
MEMORY
{flash (rxai!w) : ORIGIN = 0x00000000, LENGTH = 16Kram (wxa!ri) : ORIGIN = 0x10000000, LENGTH = 8K
}3. 定义程序栈大小,如果其他地方没有 __stack_size 的定义就把栈大小定义为 2KB:
__stack_size = DEFINED(__stack_size) ? __stack_size : 2K;4. 有些段是可读可写的,比如 .data 段,这些段是不能放到 flash 上的(flash 只读),所以我们在链接脚本中会把 .data 段指定到 ram 上存储(使用 >ram):
.lalign :{. = ALIGN(4);PROVIDE( _data_lma = . );} >flash AT>flash .dalign :{. = ALIGN(4);PROVIDE( _data = . );} >ram AT>flash .data :{*(.rdata)*(.gnu.linkonce.r.*)*(.data .data.*)*(.gnu.linkonce.d.*). = ALIGN(8);PROVIDE( __global_pointer$ = . + 0x800);*(.sdata .sdata.*)*(.gnu.linkonce.s.*). = ALIGN(8);*(.srodata.cst16)*(.srodata.cst8)*(.srodata.cst4)*(.srodata.cst2)*(.srodata .srodata.*)} >ram AT>flash . = ALIGN(4);PROVIDE( _edata = . );PROVIDE( edata = . );但这样会导致生成的二进制文件中间产生很大的空洞,因为 flash 和 ram 的地址一般是不同的,所以我们需要使用 AT>(关于 AT> 的作用可以看这篇博客https://www.cnblogs.com/LogicBai/p/16982841.html),这样可以把 .data 段先放到 flash 中,然后在启动文件 start.S 中通过 _data_lma、_data、_edata(分别对应 .data 段在 flash 中的实际地址、在 ram 上的逻辑起始地址、在 ram 上的逻辑末尾地址)这三个地址来把 .data 段从 flash 上搬运到 ram 上,这样就可以将数据存储的位置和运行的位置区分开来。
5. 因为 .bss 段的数据都为 0,所以无需占用存储空间,只需要保存 .bss 段的运行时的逻辑起始地址和末地址(__bss_start 和 _end),然后在启动时使用 start.S 将起始地址到末地址中间的内容初始化为 0 即可:
PROVIDE( __bss_start = . );.bss :{*(.sbss*)*(.gnu.linkonce.sb.*)*(.bss .bss.*)*(.gnu.linkonce.b.*)*(COMMON). = ALIGN(4);} >ram AT>ram . = ALIGN(8);PROVIDE( _end = . );3.2.2 start.S
启动文件 start.S 作为 cpu 上电复位后第一个执行的程序,主要完成以下工作:
- 初始化 gp (global pointer) 全局指针寄存器、sp (stack pointer) 栈指针寄存器;
- 将 .data 段的数据从 flash 中加载至 RAM 中;
- 清空 bss 段数据;
- 进入 main 函数运行;
start.S 的代码如下:
.section .init;
.globl _start;
.type _start, @function_start:
.option push
.option norelaxla gp, __global_pointer$
.option popla sp, _sp/* 把 data section 从 flash 搬运到 ram 中 */la a0, _data_lmala a1, _datala a2, _edatabgeu a1, a2, 2f
1:lw t0, (a0) /* 从 flash 中取出一个 word 的数据 */sw t0, (a1) /* 将取出的数据存入 ram 中对应位置 */addi a0, a0, 4addi a1, a1, 4bltu a1, a2, 1b
2:/* 将 bss section 初始化为 0 */la a0, __bss_startla a1, _endbgeu a0, a1, 2f
1:sw zero, (a0)addi a0, a0, 4bltu a0, a1, 1b
2:/* 调用初始化函数 */call _init/* 跳转到 main */call main/* never came here */
loop:j loop第 8 行, 加载全局指针寄存器 gp。
第 10 行,加载栈指针寄存器 sp。
第 13 ~ 22 行,把 .data 段从 flash 搬运到 ram 中。
第 25 ~ 31 行,将 .bss 段初始化为 0。
第 35 行,调用初始化函数,定义在 init.c 中。
第 37 行,调用 main 函数,执行用户编写的程序。
第 40、41 行,为了防止执行用户程序后,cpu 跑飞的情况,最后写了一个死循环。
3.2.3 lib 和 include 目录
这两个目录主要提供一些公共的函数,比如串口、printf 函数等,用户可以在 main.c 文件里面包含头文件后使用里面定义的函数。
3.2.4 common.mk
该文件为 Makefile 编译脚本的公共部分,所有 Makefile 文件(比如 demo 里面的 Makefile)都会包含 common.mk。
common.mk 的内容如下:
CROSS_COMPILE = riscv-none-embed-RISCV_GCC := $(CROSS_COMPILE)gcc
RISCV_AS := $(CROSS_COMPILE)as
RISCV_GXX := $(CROSS_COMPILE)g++
RISCV_OBJDUMP := $(CROSS_COMPILE)objdump
RISCV_GDB := $(CROSS_COMPILE)gdb
RISCV_AR := $(CROSS_COMPILE)ar
RISCV_OBJCOPY := $(CROSS_COMPILE)objcopy
RISCV_READELF := $(CROSS_COMPILE)readelf.PHONY: all
all: $(TARGET)ASM_SRCS += $(COMMON_DIR)/start.SC_SRCS += $(COMMON_DIR)/init.c
C_SRCS += $(COMMON_DIR)/lib/uart.c
C_SRCS += $(COMMON_DIR)/lib/printf.c
C_SRCS += $(COMMON_DIR)/lib/hw_timer.cLINKER_SCRIPT := $(COMMON_DIR)/link.ldsINCLUDES += -I$(COMMON_DIR)LDFLAGS += -T $(LINKER_SCRIPT) -nostartfiles -Wl,--gc-sections -Wl,--check-sectionsASM_OBJS := $(ASM_SRCS:.S=.o)
C_OBJS := $(C_SRCS:.c=.o)
LINK_OBJS += $(ASM_OBJS) $(C_OBJS)
LINK_DEPS += $(LINKER_SCRIPT)CLEAN_OBJS += $(TARGET) $(LINK_OBJS) $(TARGET).dump $(TARGET).bin ../$(TARGET).instCFLAGS += -march=$(RISCV_ARCH)
CFLAGS += -mabi=$(RISCV_ABI)
CFLAGS += -mcmodel=$(RISCV_MCMODEL) -nostdlib -ffunction-sections -fdata-sections -fno-builtin-printf -fno-builtin-malloc -Wall$(TARGET): $(LINK_OBJS) $(LINK_DEPS) Makefile$(RISCV_GCC) $(CFLAGS) $(INCLUDES) $(LINK_OBJS) -o $@ $(LDFLAGS)$(RISCV_OBJCOPY) -O binary $@ $@.bin$(RISCV_OBJDUMP) --disassemble-all $@ > $@.dumppython ../../tools/bin_to_mem.py $@.bin ../$@.inst$(ASM_OBJS): %.o: %.S$(RISCV_GCC) $(CFLAGS) $(INCLUDES) -c -o $@ $<$(C_OBJS): %.o: %.c$(RISCV_GCC) $(CFLAGS) $(INCLUDES) -c -o $@ $<.PHONY: clean
clean:rm -f $(CLEAN_OBJS)第 1 ~ 10 行,配置工具链。
第 15 ~ 20 行,指定需要编译的公共汇编文件和 C 文件。
第 23 行,配置链接脚本的路径。
第 25 行,指定公共头文件目录。
第 27 行,指定链接参数
- -nostartfiles:指定链接时不要使用标准的系统启动文件,自定义入口函数(_start)时必须使用 -nostartfiles 选项进行链接。
- -Wl,--gc-sections:在链接生成最终可执行文件时,如果带有
-Wl,--gc-sections参数,并且之前编译目标文件时带有-ffunction-sections、-fdata-sections参数,则链接器ld不会链接未使用的函数,从而减小可执行文件大小。 - --check-sections:检查段地址是否重叠 (默认)。
3.2.5 demo 目录
此目录下包含了 main.c 文件和 Makefile,在此目录下执行 make 命令即可生成 demo.bin 和 demo.inst 文件,下面上板测试会用到这两个文件。

main.c 文件的内容是一个简单的加法,然后输出加法的结果,用户可以改成自己的 C 程序:
/* 头文件声明 */
#include "../include/printf.h"
#include "../include/uart.h"/* main 函数 */
int main(void)
{int a = 1;int b = 2;int c = a + b;printf("The result of c: %d\n", c);/* stop here */while(1){};
}3.3 上板测试
有两种将编译好的二进制程序在本 CPU 上执行的方法。
第一种:直接作为 FPGA 比特流的一部分下载到板子上。
将 FPGA/rtl/perips/rom.v 文件里面的如下部分的注释打开,并且将路径改为生成的指令文件 demo.inst 的路径:

重新编译后,直接烧录到板子上即可:

使用串口工具连接板子,配置好串口号和波特率并打开串口后,按下板子上的复位键即可看到输出:

第二种:使用串口烧录程序。
将 demo.bin 二进制文件复制到 serial_utils/binary 目录下,然后进入 serial_utils 目录,先按住 key1 不动:
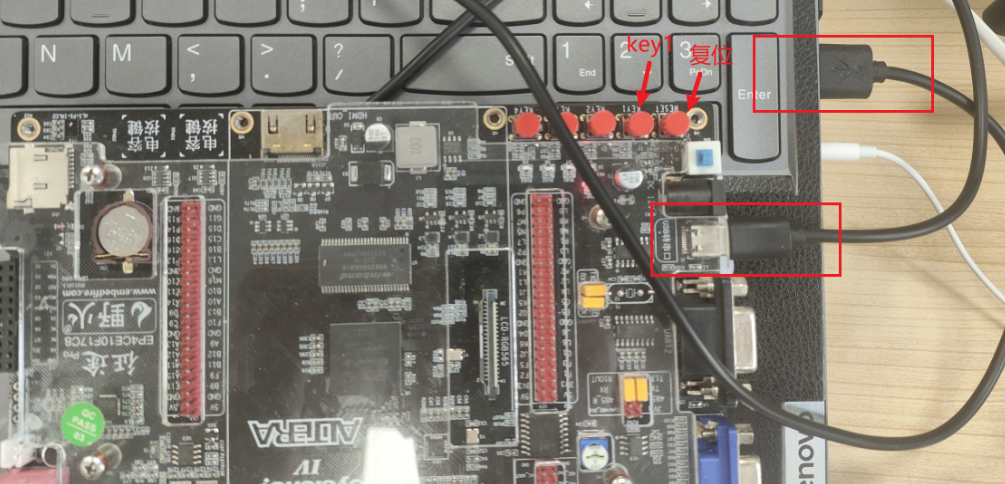
然后使用命令行执行如下命令烧录 demo.bin 文件,烧录完成即可松开 key1:
# 这里的 COM 号要根据你自己的来选,我这里是 COM3
python .\serial_send.py COM3 .\binary\demo.bin
使用串口工具连接板子,配置好串口号和波特率并打开串口后,按下板子上的复位键即可看到输出:

两种方法相比,第一种方法更为稳妥,第二种方法更为灵活,这里更建议大家使用第一种方法,在程序出问题的时候,第一种方法还可以使用 modelsim 仿真调试。
第二种方法目前还不太稳定,如果遇到第二种方法烧录失败可以多烧录几次(可能因为接触不良),或者尝试一下第一种方法。
四、写在最后
至此,如何在本项目的 CPU 上运行 C 程序已经介绍完了,既然能运行 C 程序,那么运行一个实时操作系统应该也是没问题的,这也对应了本项目的 rt-thread 实验,大家感兴趣的话可以继续学习本仓库,后续也会出相应的文章!
如果遇到问题也欢迎加群 892873718 交流~
相关文章:
RISC-V处理器设计(五)—— 在 RISC-V 处理器上运行 C 程序
目录 一、前言 二、从 C 程序到机器指令 三、实验 3.1 实验环境 3.11 Windows 平台下环境搭建 3.12 Ubuntu 平台下环境搭建 3.13 实验涉及到的代码或目录 3.2 各文件作用介绍 3.2.1 link.lds 3.2.2 start.S 3.2.3 lib 和 include 目录 3.2.4 common.mk 3.2.5 demo …...
【PIE-Engine 数据资源】全球250米LAI产品
文章目录 一、 简介二、描述三、波段四、示例代码参考资料 一、 简介 数据名称全球250米LAI产品时间范围2015年空间范围全球数据来源北京师范大学肖志强教授团队代码片段var images pie.ImageCollection(“BNU/LAI/GLOBAL-250”) 二、描述 全球 250 米叶面指数产品由北京师范…...

vcomp120.dll丢失怎么办?vcomp120.dll丢失的解决方法分享
vcomp120.dll丢失”。这个错误通常会导致某些应用程序无法正常运行,给用户带来困扰。那么,当我们遇到这个问题时,应该如何修复呢?下面我将为大家介绍四个修复vcomp120.dll丢失的方法。 一、使用dll修复程序修复 可以通过百度或许…...

linux下使用Docker Compose部署Spug实现公网远程访问
📑前言 本文主要是linux下使用Docker Compose部署Spug实现公网远程访问的文章,如果有什么需要改进的地方还请大佬指出⛺️ 🎬作者简介:大家好,我是青衿🥇 ☁️博客首页:CSDN主页放风讲故事 &am…...
【STM32 CAN】STM32G47x 单片机FDCAN作为普通CAN外设使用教程
STM32G47x 单片机FDCAN作为普通CAN外设使用教程 控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议用于汽…...

Apache Log4j2漏洞
Log4j2是一个Java日志组件,被各类Java框架广泛地使用。它的前身是Log4j,Log4j2重新构建和设计了框架,可以认为两者是完全独立的两个日志组件。本次漏洞影响范围为Log4j2最早期的版本2.0-beta9到2.15.0。Log4j2分为2个jar包,一个是接口log4j-api-${版本号}.jar,一个是具体实…...
超级干货:光纤知识总结最全的文章
你们好,我的网工朋友。 光纤已经是远距离有线信号传输的主要手段,而安装、维护光纤也是很多人网络布线的基本功。 在网络布线中,通常室外楼宇间幢与幢之间使用的是光缆,室内楼宇内部大都使用的是以太网双绞线,也有使用…...
PyCharm因安装了illuminated Cloud插件导致加载项目失败
打开Pycharm时会有弹窗提示: The license for Illuminated Cloud is invalid or has expired. All Illuminated Cloud features will be disabled. 这个弹窗会导致你加载项目一直失败,close project 也关不掉,我都是用任务管理器杀死进程的…...

微服务拆分的一些基本原则
文章首发公众号:海天二路搬砖工 单一职责原则 什么是单一职责原则 单一职责原则原本是面向对象设计中的一个基本原则,它指的是一个类只负责一项职责,不要存在多于一个导致类变更的原因。 在微服务架构中,一个微服务也应该只负…...
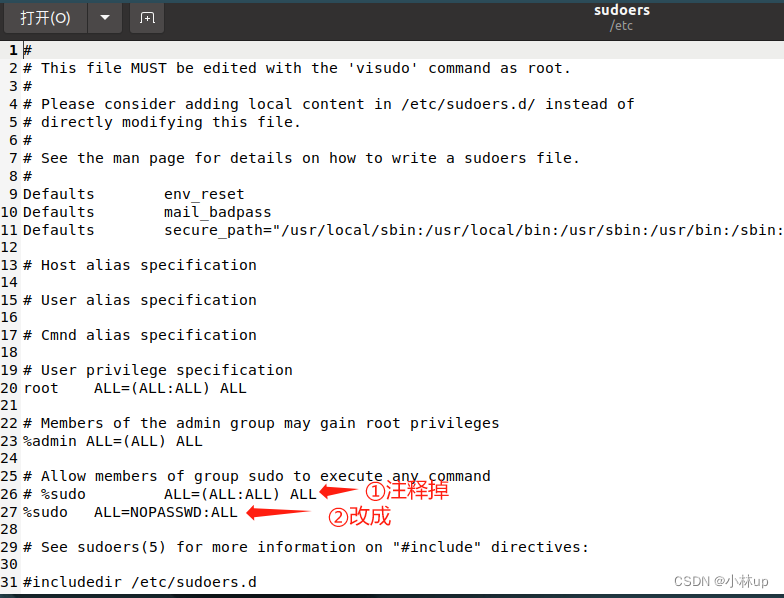
Ubuntu取消sudo的输入密码
Ubuntu最近要安装软件,每次sudo都要输入一次密码,感觉很麻烦,于是想能不能设置为不输入密码,在网上找了一下解决办法。 主要参考这篇文章: Ubuntu取消sudo时输入密码 上面这篇文章使用的是vim,但是按照博…...

基于ubuntu22.04手动安装openstack——2023.2版本(最新版)的问题汇总
前言:基本上按照openstack官方网站动手可以搭建成功(如有需要私信发部署文档)。 但是任然有些小问题,所以汇总如下。 第一个问题 问题: ubuntu搭建2023.2版本neutorn报错,ERROR neutron.plugins.ml2.driv…...

如何入门学习黑客技术?如何选择编程语言?如何选择适合黑客的操作系统?
‘ 一 ’ 了解黑客技术的基础知识 学习黑客技术需要对网络安全和计算机系统有一定的了解。可以通过参加安全培训班、阅读专业书籍和学术论文、浏览网络安全博客和论坛等方式获取基础知识。涉及的内容包括网络协议、操作系统原理、计算机网络和编程等。 ‘ 二 ’ 选择适合你的…...

教育局档案室智慧档案库房建设方案
教育局档案室智慧档案库房建设是指教育局为了更好地保存和管理学校、教师、学生等相关档案资料,以及保证这些档案资料的安全性、可靠性和完整性,而建设的一个专门的存储、管理和保护档案资料的场所。 专久智能提供的教育局档案库房建设方案从以下几个方面…...
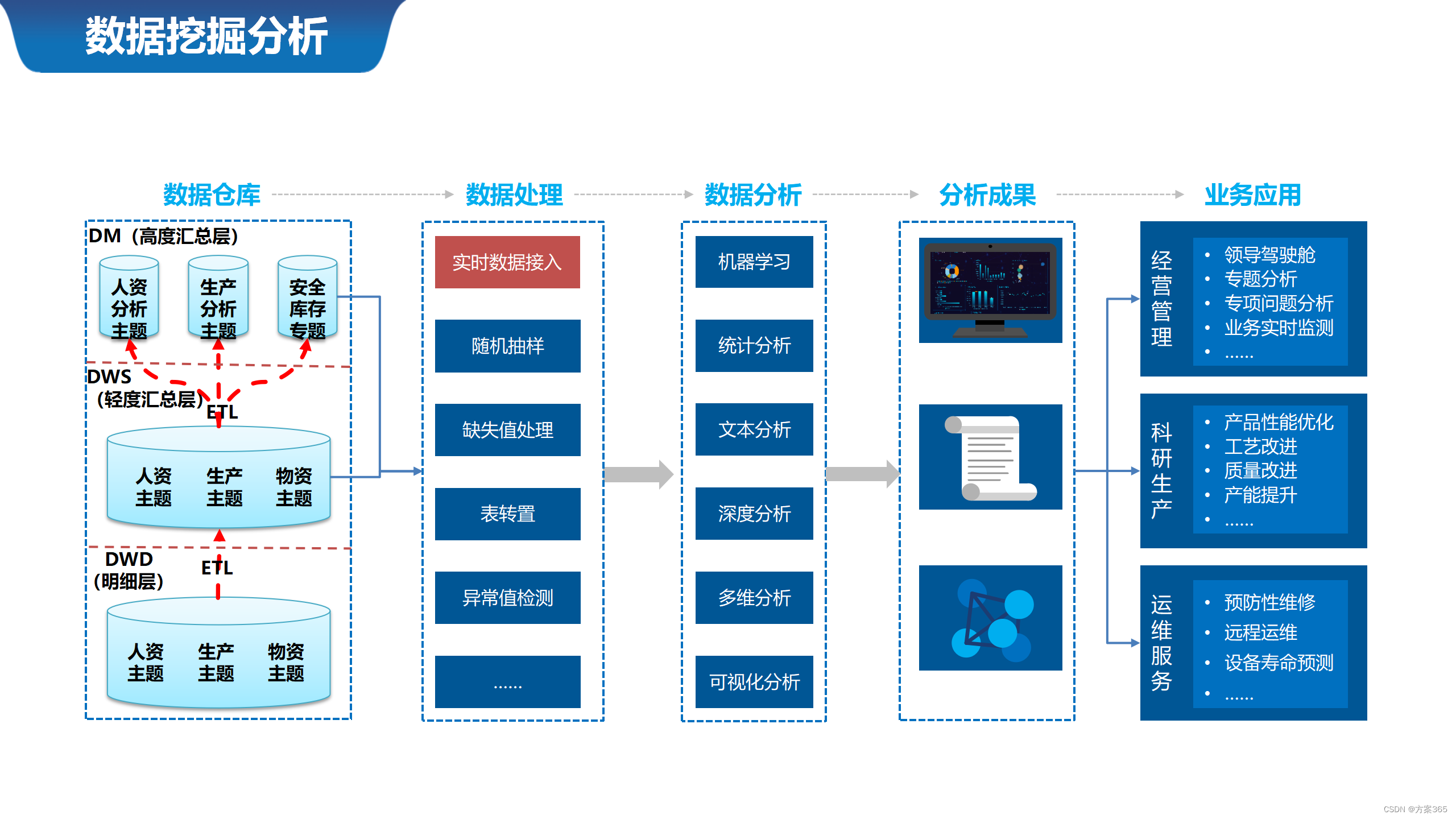
智慧城市数据中台建设方案:PPT全文51页,附下载
关键词:智慧城市解决方案,数据中台解决方案,智慧城市建设,数据中台技术架构,数据中台建设 一、智慧城市数据中台建设背景 智慧城市数据中台是在城市数字化转型和智能化升级的背景下提出的,旨在实现城市数…...

计算复杂性理论(一)图灵机
计算复杂性理论(一)图灵机 一台 k-带图灵机(TM)M 有 k-条带子。第一条带子称为输入带,用来存放输入数据,输入带是只读带。其余 k−1 条带子是工作带,既可以从工作带上读信息,也可以…...
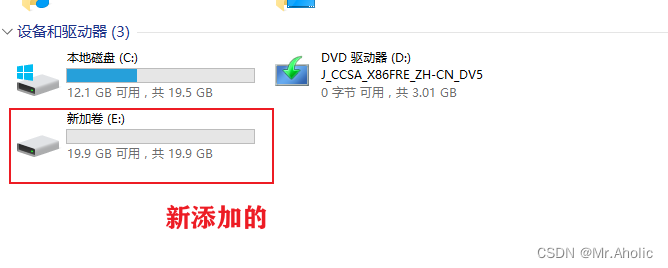
VM虚拟机只有一个C盘怎么添加硬盘新分区盘符
文章底部有个人公众号:热爱技术的小郑。主要分享开发知识、学习资料、毕业设计指导等。有兴趣的可以关注一下。为何分享? 踩过的坑没必要让别人在再踩,自己复盘也能加深记忆。利己利人、所谓双赢。 前言 VM虚拟机中安装Window 系统后&#x…...
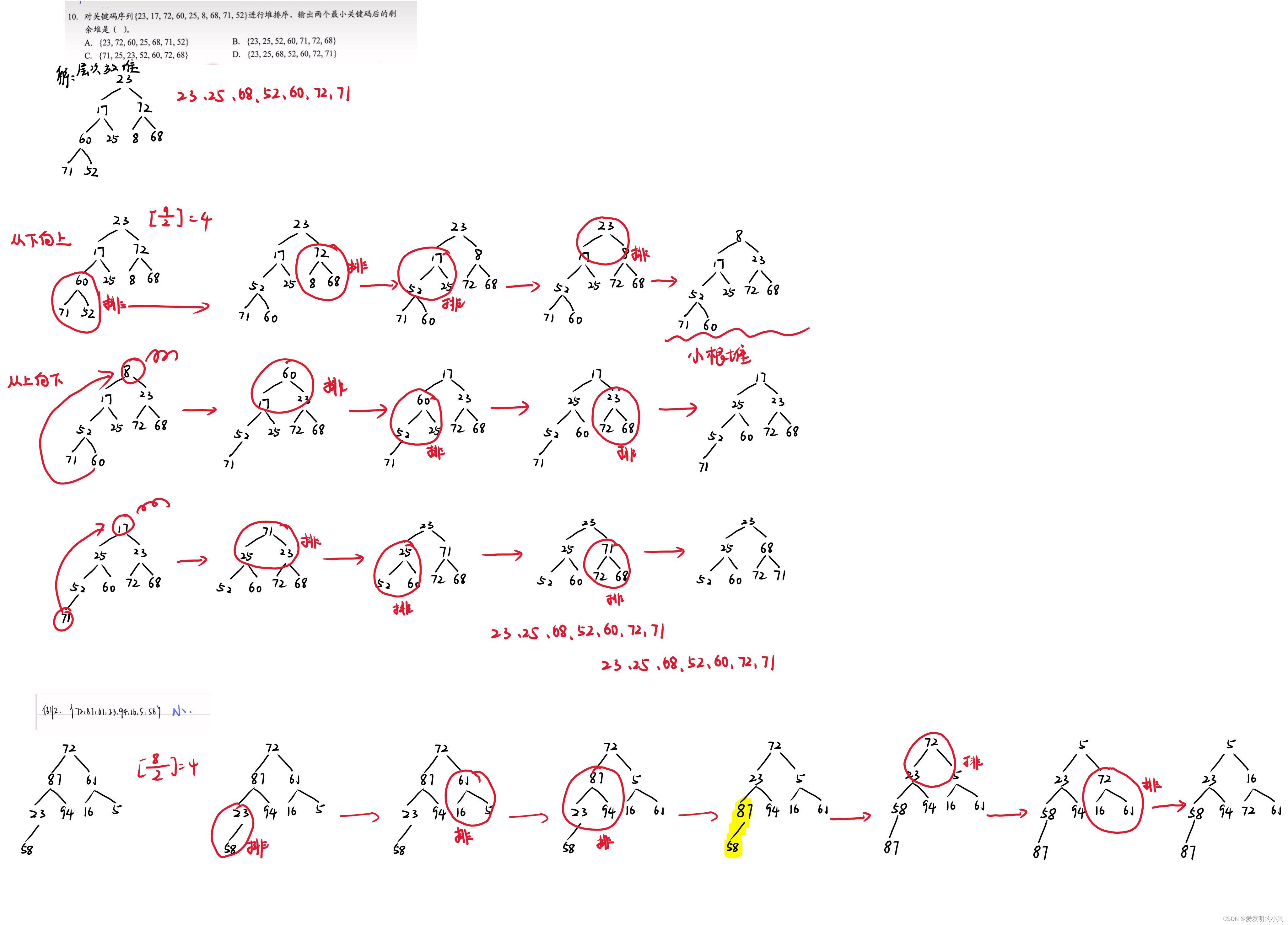
堆排序(大根堆、小根堆)
参考视频: 1、数据结构,小根堆的调整!必须熟练掌握! 2、数据结构建堆筛选输出最小值 | 计算机软件考研期末知识点2...

操作系统专栏 学习导航or使用说明
操作系统各章笔记 操作系统_第一章_系统概述 操作系统_第二章_进程的描述与控制 操作系统_第三章_处理机调度与死锁_笔记 操作系统_第四章_存储器管理 操作系统各章习题 操作系统第一章王道习题_系统概述_总结易错知识点 操作系统第二章王道习题_进程与线程_总结易错知识…...

计算机毕业设计选题推荐-课程学习微信小程序/安卓APP-项目实战
✨作者主页:IT研究室✨ 个人简介:曾从事计算机专业培训教学,擅长Java、Python、微信小程序、Golang、安卓Android等项目实战。接项目定制开发、代码讲解、答辩教学、文档编写、降重等。 ☑文末获取源码☑ 精彩专栏推荐⬇⬇⬇ Java项目 Python…...

OracleLinux9 安装 fcgiwrap 并添加 selinux 规则以在 nginx 调用
fcgiwrap在其他系统上一般直接输命令就能安装,但是OracleLinux9会提示找不到软件包。安装成功后,selinux也会阻碍nginx的调用。 原因 OracleLinux9的这个软件包位于默认不启用的developer仓库。 安装fcgiwrap 编辑配置,将repo启用 sudo v…...

突破窗口尺寸限制:WindowResizer如何重新定义Windows界面控制
突破窗口尺寸限制:WindowResizer如何重新定义Windows界面控制 【免费下载链接】WindowResizer 一个可以强制调整应用程序窗口大小的工具 项目地址: https://gitcode.com/gh_mirrors/wi/WindowResizer WindowResizer是一款专注于解决Windows窗口尺寸调整难题的…...

Go JSON 编解码性能优化技巧
Go语言因其高效的并发模型和简洁的语法广受开发者喜爱,但在处理JSON编解码时,性能问题常成为瓶颈。随着微服务和高并发场景的普及,优化JSON处理效率变得尤为重要。本文将分享几个实用的Go JSON编解码性能优化技巧,帮助开发者提升应…...

Qwen3-ASR-0.6B高性能优化:CNN加速语音特征提取
Qwen3-ASR-0.6B高性能优化:CNN加速语音特征提取 语音识别技术正在快速融入我们的日常生活,从智能助手到实时字幕,都离不开高效的语音转文本能力。Qwen3-ASR-0.6B作为一款轻量级语音识别模型,在保证识别准确率的同时,更…...

S2-Pro集成Python爬虫实战:自动化数据采集与智能分析应用
S2-Pro集成Python爬虫实战:自动化数据采集与智能分析应用 1. 引言:当爬虫遇上大模型 最近帮一家电商公司做市场调研时,遇到了一个典型问题:他们需要监控竞品价格和用户评价,但手动收集数据效率太低。传统爬虫能抓取数…...
)
从零到一:手把手教你用cam_lidar_calibration标定自己的VLP-16与海康相机(附完整ROS Bag录制技巧)
从零到一:VLP-16激光雷达与海康相机联合标定实战指南 当激光雷达点云与相机图像在自动驾驶系统中完美对齐时,传感器融合的魔法才真正开始。作为机器人感知的核心环节,标定质量直接决定了后续目标检测、SLAM等模块的精度上限。本文将手把手带您…...

通义千问1.5-1.8B-Chat-GPTQ-Int4在网络安全领域的应用初探:威胁情报摘要
通义千问1.5-1.8B-Chat-GPTQ-Int4在网络安全领域的应用初探:威胁情报摘要 每天一上班,安全运营中心的分析师小李就要面对成百上千条新涌进来的安全告警、漏洞报告和威胁情报。这些文档动辄几十页,充斥着技术术语和复杂描述,光是快…...

YOLOv8鹰眼快速入门:三步完成图像上传、检测与结果查看
YOLOv8鹰眼快速入门:三步完成图像上传、检测与结果查看 1. 引言:为什么选择YOLOv8鹰眼目标检测 在计算机视觉领域,目标检测技术正变得越来越重要。无论是安防监控、自动驾驶还是工业质检,快速准确地识别图像中的物体都是核心需求…...

【Butterfly库OpenHarmony实战使用教程】|NAPI封装+Native C API调用+真机运行
🚀Butterfly库OpenHarmony实战使用教程|NAPI封装Native C API调用真机运行 大家好,我是InMainJhy,一名在上海读本科的大一学生🎒。本篇严格按照鸿蒙三方库征文要求创作,基于NAPI封装Native C API࿰…...

pandas高效筛选技巧:如何精准匹配与排除DataFrame中的特定字符串列
1. 字符串筛选的常见场景与痛点 做数据分析的朋友们应该都遇到过这样的需求:从海量数据中快速找出包含特定关键词的记录。比如电商平台要筛选出所有包含"促销"字样的商品标题,或者客服系统需要过滤掉所有包含"投诉"关键词的工单。这…...

OpenClaw智能搜索:Qwen3.5-9B支持的知识检索与摘要
OpenClaw智能搜索:Qwen3.5-9B支持的知识检索与摘要 1. 为什么需要智能搜索助手 作为一个经常需要查阅技术文档的研究者,我每天要花大量时间在不同平台间切换——打开浏览器搜索、翻阅PDF论文、在GitHub仓库里找示例代码。最头疼的是,当需要…...