竞赛 车道线检测(自动驾驶 机器视觉)
0 前言
无人驾驶技术是机器学习为主的一门前沿领域,在无人驾驶领域中机器学习的各种算法随处可见,今天学长给大家介绍无人驾驶技术中的车道线检测。
1 车道线检测
在无人驾驶领域每一个任务都是相当复杂,看上去无从下手。那么面对这样极其复杂问题,我们解决问题方式从先尝试简化问题,然后由简入难一步一步尝试来一个一个地解决问题。车道线检测在无人驾驶中应该算是比较简单的任务,依赖计算机视觉一些相关技术,通过读取
camera 传入的图像数据进行分析,识别出车道线位置,我想这个对于 lidar
可能是无能为力。所以今天我们就从最简单任务说起,看看有哪些技术可以帮助我们检出车道线。
我们先把问题简化,所谓简化问题就是用一些条件限制来缩小车道线检测的问题。我们先看数据,也就是输入算法是车辆行驶的图像,输出车道线位置。
更多时候我们如何处理一件比较困难任务,可能有时候我们拿到任务时还没有任何思路,不要着急也不用想太多,我们先开始一步一步地做,从最简单的开始做起,随着做就会有思路,同样一些问题也会暴露出来。我们先找一段视频,这段视频是我从网上一个关于车道线检测项目中拿到的,也参考他的思路来做这件事。好现在就开始做这件事,那么最简单的事就是先读取视频,然后将其显示在屏幕以便于调试。
2 目标
检测图像中车道线位置,将车道线信息提供路径规划。
3 检测思路
- 图像灰度处理
- 图像高斯平滑处理
- canny 边缘检测
- 区域 Mask
- 霍夫变换
- 绘制车道线
4 代码实现
4.1 视频图像加载
import cv2
import numpy as np
import sys
import pygamefrom pygame.locals import *class Display(object):def __init__(self,Width,Height):pygame.init()pygame.display.set_caption('Drive Video')self.screen = pygame.display.set_mode((Width,Height),0,32)def paint(self,draw):self.screen.fill([0,0,0])draw = cv2.transpose(draw)draw = pygame.surfarray.make_surface(draw)self.screen.blit(draw,(0,0))pygame.display.update()
if __name__ == "__main__":
solid_white_right_video_path = "test_videos/丹成学长车道线检测.mp4"
cap = cv2.VideoCapture(solid_white_right_video_path)
Width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
Height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
display = Display(Width,Height)while True:ret, draw = cap.read()draw = cv2.cvtColor(draw,cv2.COLOR_BGR2RGB)if ret == False:breakdisplay.paint(draw)for event in pygame.event.get():if event.type == QUIT:sys.exit()上面代码学长就不多说了,默认大家对 python 是有所了解,关于如何使用 opencv 读取图片网上代码示例也很多,大家一看就懂。这里因为我用的是 mac
有时候显示视频图像可能会有些问题,所以我们用 pygame 来显示 opencv 读取图像。这个大家根据自己实际情况而定吧。值得说一句的是 opencv
读取图像是 BGR 格式,要想在 pygame 中正确显示图像就需要将 BGR 转换为 RGB 格式。
4.2 车道线区域
现在这个区域是我们根据观测图像绘制出来,

def color_select(img,red_threshold=200,green_threshold=200,blue_threshold=200):ysize,xsize = img.shape[:2]color_select = np.copy(img)rgb_threshold = [red_threshold, green_threshold, blue_threshold]thresholds = (img[:,:,0] < rgb_threshold[0]) \| (img[:,:,1] < rgb_threshold[1]) \| (img[:,:,2] < rgb_threshold[2])color_select[thresholds] = [0,0,0]return color_select效果如下:

4.3 区域
我们要检测车道线位置相对比较固定,通常出现车的前方,所以我们通过绘制,也就是仅检测我们关心区域。通过创建 mask 来过滤掉那些不关心的区域保留关心区域。
4.4 canny 边缘检测
有关边缘检测也是计算机视觉。首先利用梯度变化来检测图像中的边,如何识别图像的梯度变化呢,答案是卷积核。卷积核是就是不连续的像素上找到梯度变化较大位置。我们知道
sobal 核可以很好检测边缘,那么 canny 就是 sobal 核检测上进行优化。
# 示例代码,作者丹成学长:Q746876041
def canny_edge_detect(img):
gray = cv2.cvtColor(img,cv2.COLOR_RGB2GRAY)
kernel_size = 5
blur_gray = cv2.GaussianBlur(gray,(kernel_size, kernel_size),0)
low_threshold = 180high_threshold = 240edges = cv2.Canny(blur_gray, low_threshold, high_threshold)return edges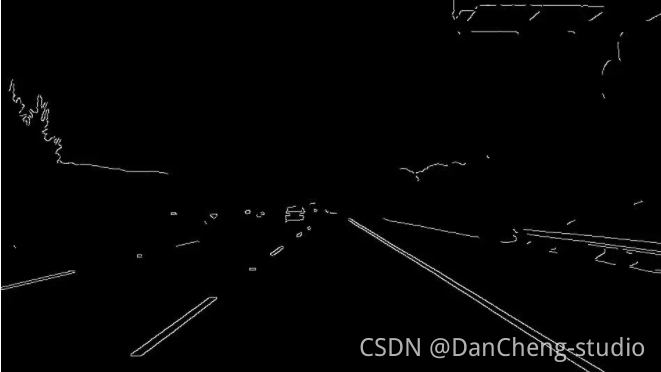
4.5 霍夫变换(Hough transform)
霍夫变换是将 x 和 y 坐标系中的线映射表示在霍夫空间的点(m,b)。所以霍夫变换实际上一种由繁到简(类似降维)的操作。当使用 canny
进行边缘检测后图像可以交给霍夫变换进行简单图形(线、圆)等的识别。这里用霍夫变换在 canny 边缘检测结果中寻找直线。
ignore_mask_color = 255 # 获取图片尺寸imshape = img.shape# 定义 mask 顶点vertices = np.array([[(0,imshape[0]),(450, 290), (490, 290), (imshape[1],imshape[0])]], dtype=np.int32)# 使用 fillpoly 来绘制 maskcv2.fillPoly(mask, vertices, ignore_mask_color)masked_edges = cv2.bitwise_and(edges, mask)# 定义Hough 变换的参数rho = 1 theta = np.pi/180threshold = 2min_line_length = 4 # 组成一条线的最小像素数max_line_gap = 5 # 可连接线段之间的最大像素间距# 创建一个用于绘制车道线的图片line_image = np.copy(img)*0 # 对于 canny 边缘检测结果应用 Hough 变换# 输出“线”是一个数组,其中包含检测到的线段的端点lines = cv2.HoughLinesP(masked_edges, rho, theta, threshold, np.array([]),min_line_length, max_line_gap)# 遍历“线”的数组来在 line_image 上绘制for line in lines:for x1,y1,x2,y2 in line:cv2.line(line_image,(x1,y1),(x2,y2),(255,0,0),10)color_edges = np.dstack((edges, edges, edges)) import mathimport cv2import numpy as np"""Gray ScaleGaussian SmoothingCanny Edge DetectionRegion MaskingHough TransformDraw Lines [Mark Lane Lines with different Color]"""class SimpleLaneLineDetector(object):def __init__(self):passdef detect(self,img):# 图像灰度处理gray_img = self.grayscale(img)print(gray_img)#图像高斯平滑处理smoothed_img = self.gaussian_blur(img = gray_img, kernel_size = 5)#canny 边缘检测canny_img = self.canny(img = smoothed_img, low_threshold = 180, high_threshold = 240)#区域 Maskmasked_img = self.region_of_interest(img = canny_img, vertices = self.get_vertices(img))#霍夫变换houghed_lines = self.hough_lines(img = masked_img, rho = 1, theta = np.pi/180, threshold = 20, min_line_len = 20, max_line_gap = 180)# 绘制车道线output = self.weighted_img(img = houghed_lines, initial_img = img, alpha=0.8, beta=1., gamma=0.)return outputdef grayscale(self,img):return cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)def canny(self,img, low_threshold, high_threshold):return cv2.Canny(img, low_threshold, high_threshold)def gaussian_blur(self,img, kernel_size):return cv2.GaussianBlur(img, (kernel_size, kernel_size), 0)def region_of_interest(self,img, vertices):mask = np.zeros_like(img) if len(img.shape) > 2:channel_count = img.shape[2] ignore_mask_color = (255,) * channel_countelse:ignore_mask_color = 255cv2.fillPoly(mask, vertices, ignore_mask_color)masked_image = cv2.bitwise_and(img, mask)return masked_imagedef draw_lines(self,img, lines, color=[255, 0, 0], thickness=10):for line in lines:for x1,y1,x2,y2 in line:cv2.line(img, (x1, y1), (x2, y2), color, thickness)def slope_lines(self,image,lines):img = image.copy()poly_vertices = []order = [0,1,3,2]left_lines = [] right_lines = [] for line in lines:for x1,y1,x2,y2 in line:if x1 == x2:pass else:m = (y2 - y1) / (x2 - x1)c = y1 - m * x1if m < 0:left_lines.append((m,c))elif m >= 0:right_lines.append((m,c))left_line = np.mean(left_lines, axis=0)right_line = np.mean(right_lines, axis=0)
for slope, intercept in [left_line, right_line]:
rows, cols = image.shape[:2]y1= int(rows) y2= int(rows*0.6)x1=int((y1-intercept)/slope)x2=int((y2-intercept)/slope)poly_vertices.append((x1, y1))poly_vertices.append((x2, y2))self.draw_lines(img, np.array([[[x1,y1,x2,y2]]]))poly_vertices = [poly_vertices[i] for i in order]cv2.fillPoly(img, pts = np.array([poly_vertices],'int32'), color = (0,255,0))return cv2.addWeighted(image,0.7,img,0.4,0.)def hough_lines(self,img, rho, theta, threshold, min_line_len, max_line_gap):lines = cv2.HoughLinesP(img, rho, theta, threshold, np.array([]), minLineLength=min_line_len, maxLineGap=max_line_gap)line_img = np.zeros((img.shape[0], img.shape[1], 3), dtype=np.uint8)line_img = self.slope_lines(line_img,lines)return line_imgdef weighted_img(self,img, initial_img, alpha=0.1, beta=1., gamma=0.):lines_edges = cv2.addWeighted(initial_img, alpha, img, beta, gamma)return lines_edgesdef get_vertices(self,image):rows, cols = image.shape[:2]bottom_left = [cols*0.15, rows]top_left = [cols*0.45, rows*0.6]bottom_right = [cols*0.95, rows]top_right = [cols*0.55, rows*0.6] ver = np.array([[bottom_left, top_left, top_right, bottom_right]], dtype=np.int32)return ver
4.6 HoughLinesP 检测原理
接下来进入代码环节,学长详细给大家解释一下 HoughLinesP 参数的含义以及如何使用。
lines = cv2.HoughLinesP(cropped_image,2,np.pi/180,100,np.array([]),minLineLength=40,maxLineGap=5)
- 第一参数是我们要检查的图片 Hough accumulator 数组
- 第二个和第三个参数用于定义我们 Hough 坐标如何划分 bin,也就是小格的精度。我们通过曲线穿过 bin 格子来进行投票,我们根据投票数量来决定 p 和 theta 的值。2 表示我们小格宽度以像素为单位 。
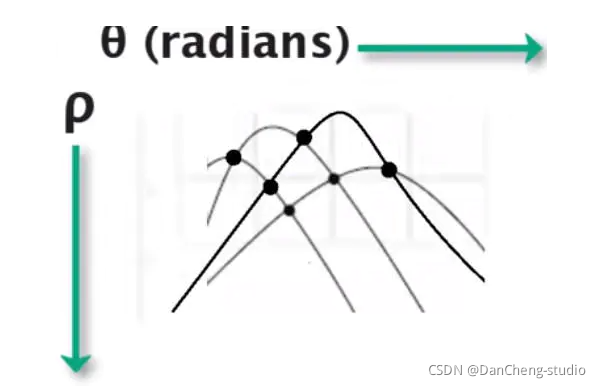
我们可以通过下图划分小格,只要曲线穿过就会对小格进行投票,我们记录投票数量,记录最多的作为参数
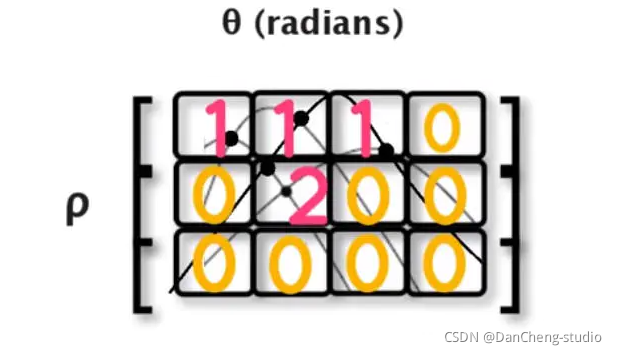
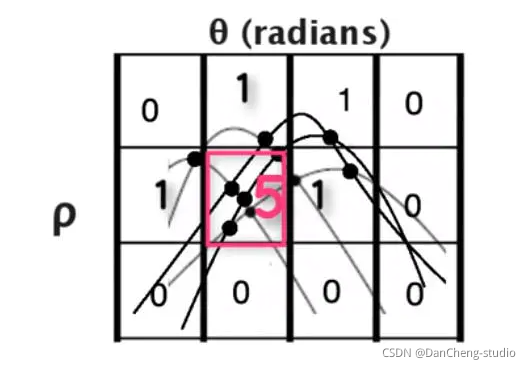
- 如果定义尺寸过大也就失去精度,如果定义格子尺寸过小虽然精度上来了,这样也会打来增长计算时间。
- 接下来参数 100 表示我们投票为 100 以上的线才是符合要求是我们要找的线。也就是在 bin 小格子需要有 100 以上线相交于此才是我们要找的参数。
- minLineLength 给 40 表示我们检查线长度不能小于 40 pixel
- maxLineGap=5 作为线间断不能大于 5 pixel
4.6.1 定义显示车道线方法
def disply_lines(image,lines):
pass
通过定义函数将找到的车道线显示出来。
line_image = disply_lines(lane_image,lines)
4.6.2 查看探测车道线数据结构
def disply_lines(image,lines):
line_image = np.zeros_like(image)
if lines is not None:
for line in lines:
print(line)
先定义一个尺寸大小和原图一样的矩阵用于绘制查找到车道线,我们先判断一下是否已经找到车道线,lines 返回值应该不为 None
是一个矩阵,我们可以简单地打印一下看一下效果
[[704 418 927 641]]
[[704 426 791 516]]
[[320 703 445 494]]
[[585 301 663 381]]
[[630 341 670 383]]
4.6.3 探测车道线
看数据结构[[x1,y1,x2,y2]] 的二维数组,这就需要我们转换一下为一维数据[x1,y1,x2,y2]
def disply_lines(image,lines):
line_image = np.zeros_like(image)
if liness is not None:
for line in lines:
x1,y1,x2,y2 = line.reshape(4)
cv2.line(line_image,(x1,y1),(x2,y2),(255,0,0),10)
return line_image
line_image = disply_lines(lane_image,lines)
cv2.imshow('result',line_image)
4.6.4 合成
有关合成图片我们是将两张图片通过给一定权重进行叠加合成。

4.6.5 优化

探测到的车道线还是不够平滑,我们需要优化,基本思路就是对这些直线的斜率和截距取平均值然后将所有探测出点绘制到一条直线上。
def average_slope_intercept(image,lines):left_fit = []right_fit = []for line in lines:x1, y1, x2, y2 = line.reshape(4)parameters = np.polyfit((x1,x2),(y1,y2),1)print(parameters)
这里学长定义两个数组 left_fit 和 right_fit 分别用于存放左右两侧车道线的点,我们打印一下 lines 的斜率和截距,通过 numpy
提供 polyfit 方法输入两个点我们就可以得到通过这些点的直线的斜率和截距。
[ 1. -286.]
[ 1.03448276 -302.27586207]
[ -1.672 1238.04 ]
[ 1.02564103 -299.
[ 1.02564103 -299.
def average_slope_intercept(image,lines):left_fit = []right_fit = []for line in lines:x1, y1, x2, y2 = line.reshape(4)parameters = np.polyfit((x1,x2),(y1,y2),1)# print(parameters)slope = parameters[0]intercept = parameters[1]if slope < 0:left_fit.append((slope,intercept))else:right_fit.append((slope,intercept))print(left_fit)print(right_fit)
我们输出一下图片大小,我们图片是以其左上角作为原点 0 ,0 来开始计算的,所以我们直线从图片底部 700 多向上绘制我们无需绘制全部可以截距一部分即可。
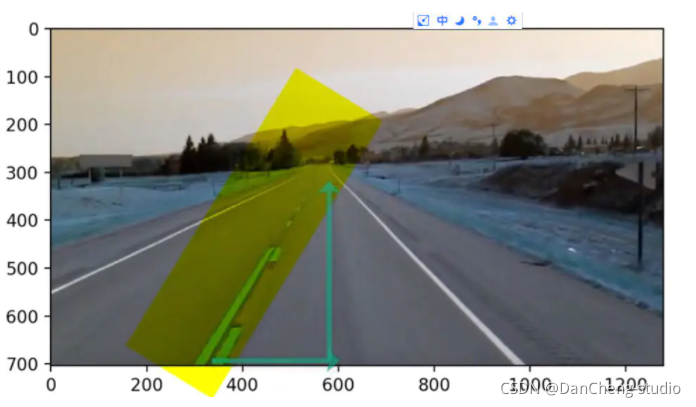
def make_coordinates(image, line_parameters):slope, intercept = line_parametersy1 = image.shape[0]y2 = int(y1*(3/5)) x1 = int((y1 - intercept)/slope)x2 = int((y2 - intercept)/slope)# print(image.shape)return np.array([x1,y1,x2,y2])
所以直线开始和终止我们给定 y1,y2 然后通过方程的斜率和截距根据y 算出 x。
averaged_lines = average_slope_intercept(lane_image,lines);
line_image = disply_lines(lane_image,averaged_lines)
combo_image = cv2.addWeighted(lane_image,0.8, line_image, 1, 1,1)
cv2.imshow('result',combo_image)

5 最后
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
竞赛 车道线检测(自动驾驶 机器视觉)
0 前言 无人驾驶技术是机器学习为主的一门前沿领域,在无人驾驶领域中机器学习的各种算法随处可见,今天学长给大家介绍无人驾驶技术中的车道线检测。 1 车道线检测 在无人驾驶领域每一个任务都是相当复杂,看上去无从下手。那么面对这样极其…...

128. 最长连续序列
这道题最简单的想法就是排序计数,但是复杂度为O(nlogn),不符合题意 于是采用哈希表的方法 将所有数字存放在哈希表中,然后开始逐个寻找。 比如当前遍历到x,如果x-1也存在哈希表中,那就从x-1开始遍历最长连续序列&#…...

设计模式-设计原则
文章目录 设计模式-设计原则单一职责原则开闭原则里氏替换原则依赖倒转原则接口隔离原则合成复用原则迪米特法则 设计模式-设计原则 单一职责原则 单一职责原则:一个对象应该只包含单一的职责,并且该职责被完整地封装在一个类中。 有时候类的功能并不…...

MongoDB基础运维
mongodb的基础概念介绍 database #数据库 collection #集合,类似于mysql中的表 filed #类似于mysql中字段 document #每行的记录 连接客户端 mongo ip:port 例如mongo 127.0.0.1:27017 mongo客户端的命…...

侧击雷如何检测预防
侧击雷是一种雷击的形式,指的是雷电从建筑物的侧面打来的直接雷击。侧击雷对高层建筑物的防雷保护提出了更高的要求,因为一般的避雷带或避雷针不能完全保护住建筑物的侧面。侧击雷可能会对建筑物的结构、设备和人员造成严重的损害,甚至引发火…...

检索搜索信息能力
(一)搜索工具的选择 谷歌 > 微信搜一搜 > 抖音等短视频 > 百度 (二)搜索方式 一,搜索内容的分类 信息类学习类工具类 二,谷歌浏览器的搜索技巧 1、“搜索内容” 限定完整出现的词 如下图搜…...
设计大咖亲授:Figma中文环境设置全攻略!
作为UI设计师,你一定很熟悉Figma,Figma是一款专注于UI/UX设计的在线协作工具,使用非常高效方便,不需要下载和安装。它只需要通过浏览器编辑,在国外很受欢迎。但是Figma对于国内的小伙伴来说,使用Figma有一定…...
)
华为Hcia-数通学习(更改策略)
方法:书籍视频题目训练 书籍:华为HCNA网络技术学习指南。 视频:网络工程师学习路线_哔哩哔哩_bilibili 有过一点基础。考软考网络工程师的时候做了大量笔记,回去复习了一遍。现在准备找工作了,开始学习华为认证的网…...
数据校验:Spring Validation
Spring Validation概述 在开发中,我们经常遇到参数校验的需求,比如用户注册的时候,要校验用户名不能为空、用户名长度不超过20个字符、手机号是合法的手机号格式等等。如果使用普通方式,我们会把校验的代码和真正的业务处理逻辑耦…...

CSS怎么选择除了第一个子元素外的其余同级子元素
使用 CSS 的:not()伪类选择器和:nth-child()伪类选择器 要通过CSS的代码选择某一个元素的除了第一个子元素外的其余的跟第一个子元素同级的子元素,可以结合使用CSS的:not()伪类选择器和:nth-child()伪类选择器进行选择。大致的语法如下: .parent > …...
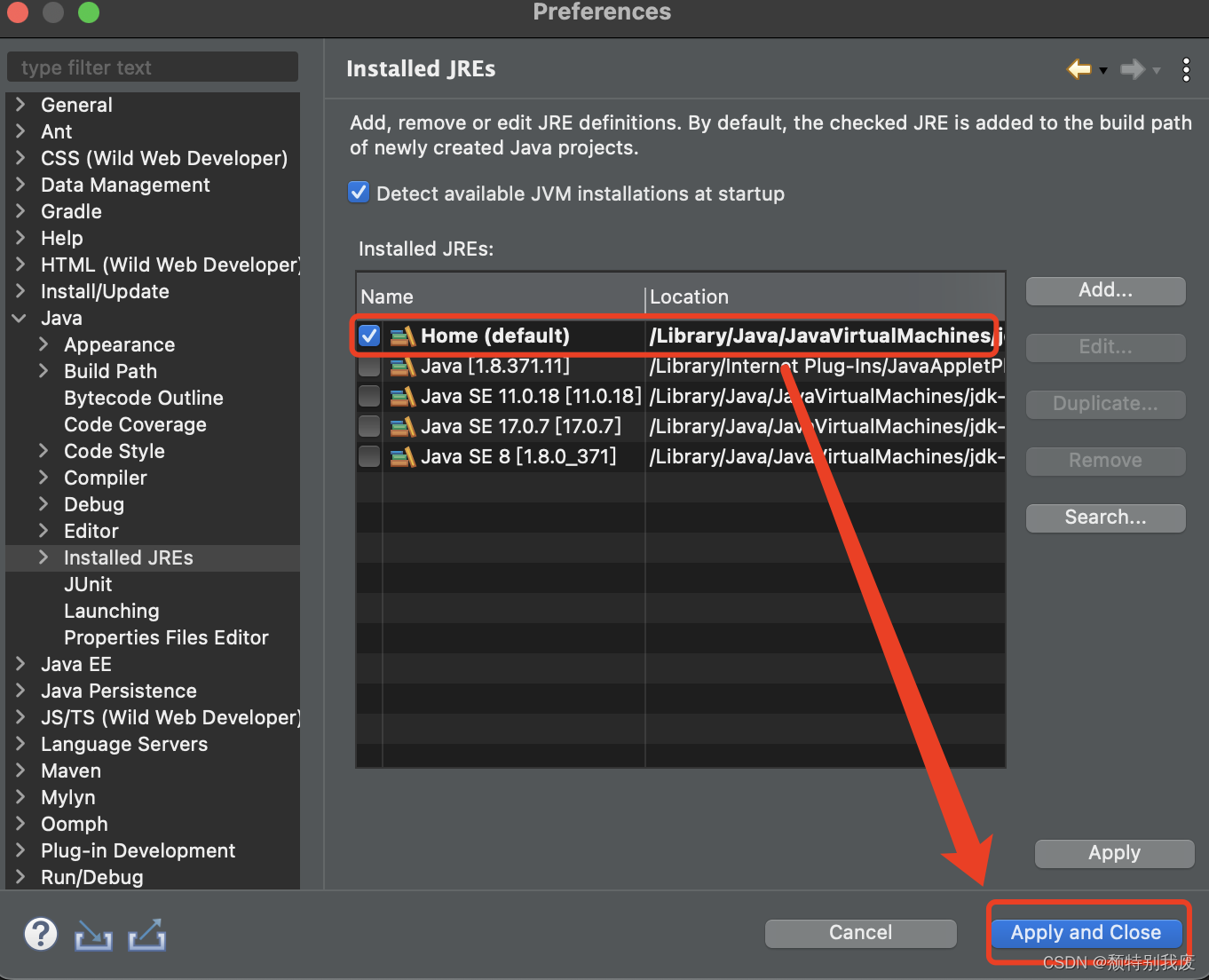
Mac下eclipse配置JDK
目录 一、配置JDK,需要电脑下载Java并且配置环境 (1)、左上角找到“Eclipse”-->“Preferences...” (2)、找到“Java”-->“Installde JREs”-->界面显示电脑所安安装的Java;若没有需要点击“Add”进行配置 ①、选择“Standard VM”--&g…...

基于springboot实现体育场馆运营平台项目【项目源码】
基于springboot实现体育场馆运营管理系统演示 系统开发平台 在该数码论坛系统中,Eclipse能给用户提供更多的方便,其特点一是方便学习,方便快捷;二是有非常大的信息储存量,主要功能是用在对数据库中查询和编程。其功能…...
优雅的Java编程:将接口对象作为方法参数
theme: smartblue 目录 概述 在Java编程中,方法的参数传递方式通常是通过基本类型、对象引用或者集合等方式。然而,一种更加优雅且灵活的设计模式是将接口对象作为方法的参数。这种方式为我们带来了许多好处,包括降低耦合性、实现多态性和可…...
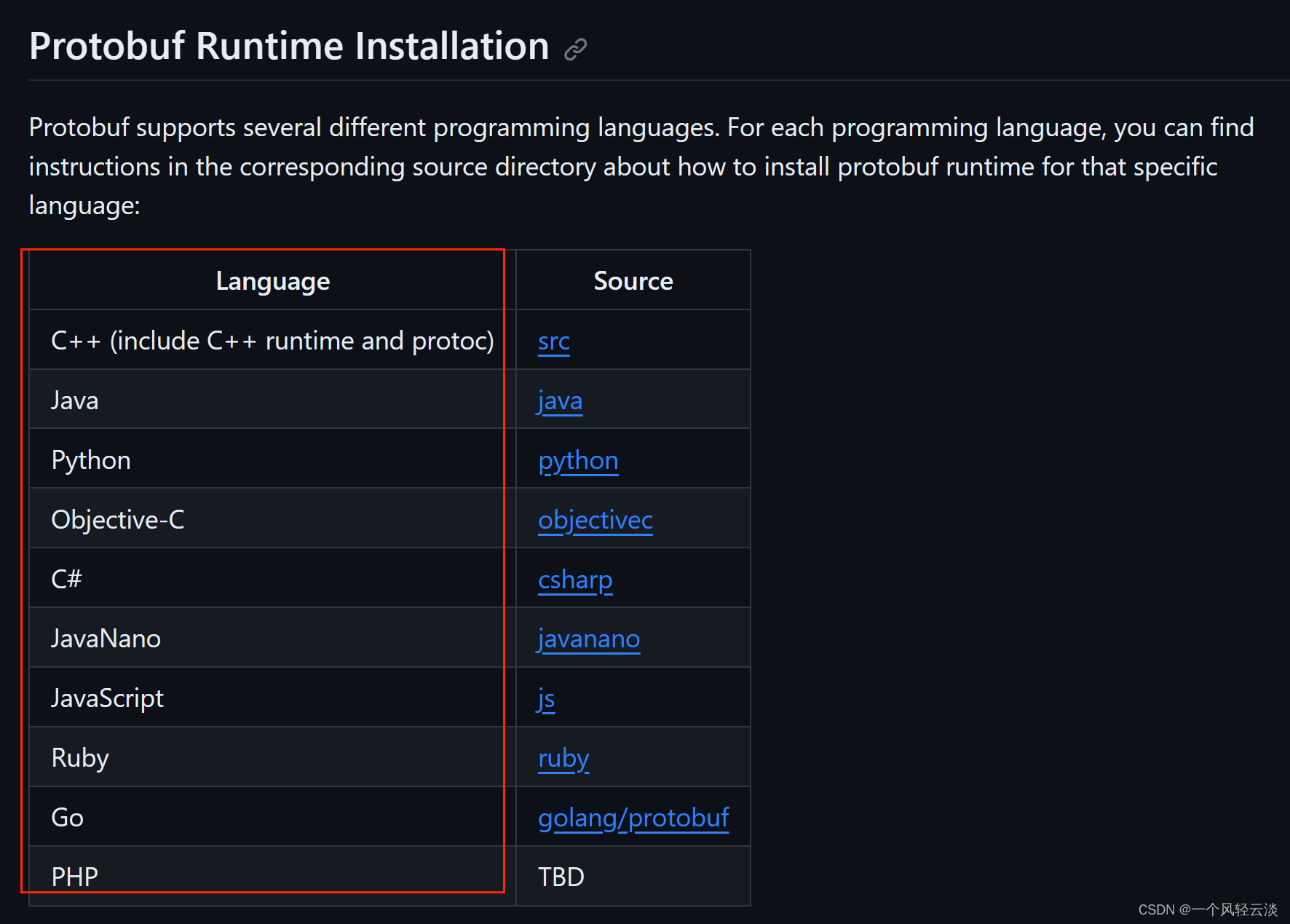
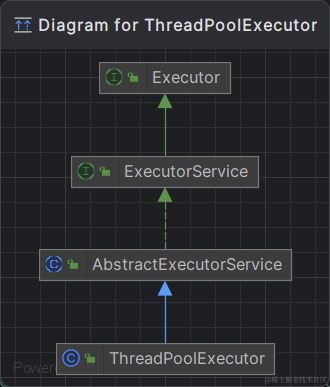
一文简单聊聊protobuf
目录 基本介绍 原理 同类对比 为什么要使用protobuf? 基本介绍 protobuf的全称是Protocol Buffer,是Google提供的一种数据序列化协议。Protocol Buffers 是一种轻便高效的结构化数据存储格式,可以用于结构化数据序列化,很适合做数据存储…...

Unity Meta Quest 一体机开发(五):手势抓取概述
文章目录 📕教程说明📕 Oculus Integration 中的三种手势抓取方式⭐Hand Grab⭐Touch Hand Grab⭐Distance Hand Grab 此教程相关的详细教案,文档,思维导图和工程文件会放入 Seed XR 社区。这是一个高质量知识星球 XR 社区&#…...
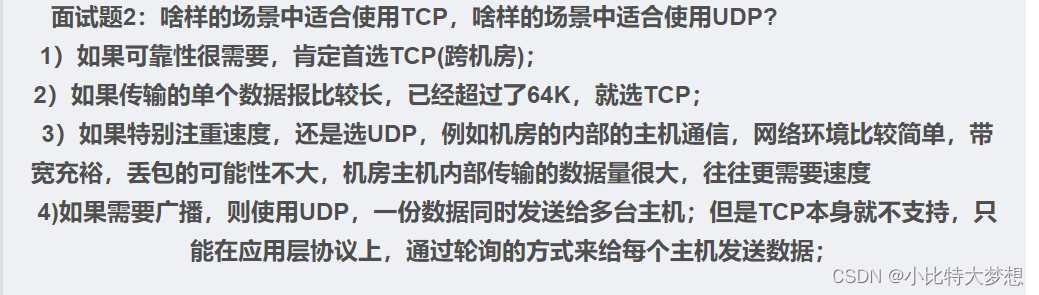
传输层中的TCP和UPD协议
一)应用层协议简介:根据需求明确要传输的信息,明确要传输的数据格式; 应用层协议:这个协议,实际上是和程序员打交道最多的协议了 1)其它四层都是操作系统,驱动,硬件实现好了的,咱们是不需要管 2)应用层:当我…...
)
插入排序算法(C++版)
1、什么是插入排序 插入排序(Insertion Sort)是一种简单直观的排序算法,它的基本思想是将一个待排序的数组分为已排序和未排序两个部分,然后逐步将未排序的元素插入到已排序的部分,直到整个数组有序。 2、插入排序的…...
Tracking vs. No-Tracking Queries
学习链接 Tracking queries By default, queries that return entity types are tracking. A tracking query means any changes to entity instances are persisted by SaveChanges. var blog context.Blogs.SingleOrDefault(b > b.BlogId 1); blog.Rating 5; contex…...
Centos7安装frps实现内网穿透
前提 公网设备:云服务器1台,带公网IP 内网设备:linux、群晖、openwrt都可以 我的环境: 云服务器:centos7.9 内网:openwrt软路由 防火墙&&安全组 关闭云服务器的防火墙: 关闭防火墙…...

cryptopp Base64Encoder \n问题
1、问题: new Base64Encoder(new StringSink(out_base)) 调用库函数Base64Encoder进行base64加密后确认多出来了\n 2、原因 base64加密的问题, 由于base64一行不能超过76字符, 超过就会添加回车换行符(在Windows中是 \r\n , 在Linux中是 \n ) 3、解决 方法一、给定参…...

defx.nvim 安装与配置完全教程:从零开始搭建高效文件管理系统 [特殊字符]
defx.nvim 安装与配置完全教程:从零开始搭建高效文件管理系统 🚀 【免费下载链接】defx.nvim :file_folder: The dark powered file explorer implementation for neovim/Vim8 项目地址: https://gitcode.com/gh_mirrors/de/defx.nvim defx.nvim …...

WarcraftHelper终极指南:深度解析魔兽争霸III现代化兼容性解决方案
WarcraftHelper终极指南:深度解析魔兽争霸III现代化兼容性解决方案 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper WarcraftHelper是一款专…...

ZMJS,把 JavaScript 解释器放进 SAP ABAP 应用服务器之后,很多扩展思路会变得不一样
我今天看这个 oisee/zmjs 仓库时,最吸引人的不是它把 JavaScript 语法做进了 ABAP,而是它选择了一条非常 SAP 的路线,纯 ABAP、无外部依赖、无 Kernel Module、以类和接口的形式运行在 SAP 应用服务器内部。仓库自己的定位很直接,ZMJS 是一个面向 SAP ABAP 的 Mini JavaScr…...

Style-Bert-VITS2未来发展方向:从语音克隆到实时语音转换的技术演进路线
Style-Bert-VITS2未来发展方向:从语音克隆到实时语音转换的技术演进路线 【免费下载链接】Style-Bert-VITS2 Style-Bert-VITS2: Bert-VITS2 with more controllable voice styles. 项目地址: https://gitcode.com/gh_mirrors/st/Style-Bert-VITS2 Style-Bert…...

机器学习的最佳实践:这7个原则让你的模型更稳定
对于软件测试从业者而言,机器学习技术正在快速融入测试流程:从自动化测试用例生成、缺陷预测到测试环境异常检测,机器学习模型的稳定性直接决定了测试结果的可靠性——如果模型在测试环境波动、输入数据变化时性能骤降,不仅无法提…...
)
保姆级教程:手把手教你为ESXi 6.7配置主板BIOS(VT-x/VT-d/AES全开)
从零开始:ESXi 6.7主板BIOS设置完全指南当你第一次接触企业级虚拟化平台时,那种既兴奋又忐忑的心情我完全理解。作为过来人,我清楚地记得自己第一次为ESXi配置BIOS时的迷茫——那些专业术语像天书一样,生怕设置错误导致服务器无法…...

Python-for-Android 完整指南:5分钟将Python应用打包为Android APK
Python-for-Android 完整指南:5分钟将Python应用打包为Android APK 【免费下载链接】python-for-android Turn your Python application into an Android APK 项目地址: https://gitcode.com/gh_mirrors/py/python-for-android Python-for-Android࿰…...

避坑指南:Unity中AABB碰撞检测失效的5种常见原因及解决方法
Unity中AABB碰撞检测失效的深度排查与解决方案在Unity开发中,AABB(轴对齐包围盒)碰撞检测是基础但容易出问题的环节。许多开发者都遇到过这样的情况:明明逻辑正确,测试时却出现物体穿透、碰撞时有时无等诡异现象。本文…...

Unity中实现深度遮挡:LingBot-Depth实战接入与优化
1. 这不是“加个插件就完事”的AR效果——为什么LingBot-Depth在Unity里值得专门写一篇实战教程你肯定见过那种AR应用:虚拟椅子摆在真实地板上,但当你绕到椅子后面,它依然完整显示,完全无视身后那堵真实的墙;或者一只3…...

基于Jetson Nano与JNEEG Shield的脑电信号采集与边缘AI处理实战
1. 项目概述:低成本脑机接口的硬件基石 如果你对脑机接口、生物信号处理或者边缘AI应用感兴趣,但又苦于专业设备动辄数万甚至数十万的高昂门槛,那么JNEEG Shield的出现,可能会为你打开一扇新的大门。这是一个专为NVIDIA Jetson Na…...