未来之路:大模型技术在自动驾驶的应用与影响
本文深入分析了大模型技术在自动驾驶领域的应用和影响,万字长文,慢慢观看~
- 文中首先概述了大模型技术的发展历程,自动驾驶模型的迭代路径,以及大模型在自动驾驶行业中的作用。
- 接着,详细介绍了大模型的基本定义、基础功能和关键技术,特别是Transformer注意力机制和预训练-微调范式。
- 文章还介绍了大模型在任务适配性、模型变革和应用前景方面的潜力。
- 在自动驾驶技术的部分,详细回顾了从CNN到RNN、GAN,再到BEV和Transformer结合的技术迭代路径,以及占用网络模型的应用。
- 最后,文章重点讨论了大模型如何在自动驾驶的感知、预测和决策层面提供赋能,突出了其在该领域的重要性和影响力。
目录
一、本文概述
1.1 大模型技术发展历程
1.2 自动驾驶模型迭代路径
1.3 大模型对自动驾驶行业的赋能与影响
二、大模型技术发展历程
2.1 大模型基本定义与基础功能
2.2 大模型的基础——Transformer注意力机制
2.3 大模型的预训练-微调范式
2.4 探索大模型:任务适配性、模型变革与应用前景
三、自动驾驶技术迭代路径
3.1 自动驾驶算法核心模块概览
3.2 CNN
3.3 RNN、GAN
3.4 BEV
3.5 Transformer+BEV
3.6 占用网络模型
四、大模型对自动驾驶行业的赋能
4.1 自动驾驶的大模型
4.2 车端赋能主要作用于感知和预测环节,逐渐向决策层渗透
一、本文概述
1.1 大模型技术发展历程
大模型泛指具有数十亿甚至上百亿参数的深度学习模型,而大语言模型是大模型的一个典型分支(以ChatGPT为代表)
Transformer架构的提出引入了注意力机制,突破了RNN和CNN处理长序列的固有局限,使语言模型能在大规模语料上得
到丰富的语言知识预训练:
- 一方面,开启了大语言模型快速发展的新时代;
- 另一方面奠定了大模型技术实现的基础,为其他领域模型通过增大参数量提升模型效果提供了参考思路。
复杂性、高维度、多样性和个性化要求使得大型模型在自动驾驶、量化交易、医疗诊断和图像分析、自然语言处理和智能对
话任务上更易获得出色的建模能力。
1.2 自动驾驶模型迭代路径
自动驾驶算法模块可分为感知、决策和规划控制三个环节。其中感知模块为关键的组成部分,经历了多样化的模型迭代:
CNN(2011-2016)—— RNN+GAN(2016-2018)—— BEV(2018-2020)—— Transformer+BEV(2020至
今)—— 占用网络(2022至今)
可以看一下特斯拉智能驾驶迭代历程:

- 2020年重构自动驾驶算法,引入BEV+Transformer取 代传统的2D+CNN算法,并采用特征级融合取代后融合,自动标注取代人工标注。
- 2022年算法中引入 时序网络,并将BEV升级为占用网络(Occupancy Network)。
- 2023年8月,端到端AI自动驾驶系统FSD Beta V12首次公开亮相,完全依靠车载摄像头和神经网络来识别道路和交通情况,并做出相应的决策。
1.3 大模型对自动驾驶行业的赋能与影响
自动驾驶领域的大模型发展相对大语言模型滞后,大约始于2019年,吸取了GPT等模型成功经验。
大模型的应用加速模型端的成熟,为L3/L4级别的自动驾驶技术落地提供了更加明确的预期。
可从成本、技术、监管与安全四个层面对于L3及以上级别自动驾驶落地的展望,其中:
- 成本仍有下降空间
- 技术的发展仍将沿着算法和硬件两条主线并进
- 法规政策还在逐步完善之中
- 安全性成为自动驾驶汽车实现商业化落地必不可少的重要因素
各主机厂自2021年开始加速对L2+自动驾驶的布局,且预计在2024年左右实现L2++(接近L3)或者更高级别的自动驾驶功能的落地,其中政策有望成为主要催化。
二、大模型技术发展历程
2.1 大模型基本定义与基础功能
大模型基本定义:由大语言模型到泛在的大模型大模型主要指具有数十亿甚至上百亿参数的深度学习模型,比较有代表性的是大型语言模型( Large Language Models,比如最近大热的ChatGPT)。
大型语言模型是一种深度学习算法,可以使用非常大的数据集来识别、总结、翻译、预测和生成内容。
大语言模型在很大程度上代表了一类称为Transformer网络的深度学习架构。Transformer模型是一个神经网络,通过跟
踪序列数据中的关系(像这句话中的词语)来学习上下文和含义。
Transformer架构的提出,开启了大语言模型快速发展的新时代:
- 谷歌的BERT首先证明了预训练模型的强大潜力
- OpenAI的GPT系列及Anthropic的Claude等继续探索语言模型技术的边界。越来越大规模的模型不断刷新自然语言处理的技术状态。这些模型拥有数百亿或上千亿参数,可以捕捉语言的复杂语义关系,并进行人类级别的语言交互。
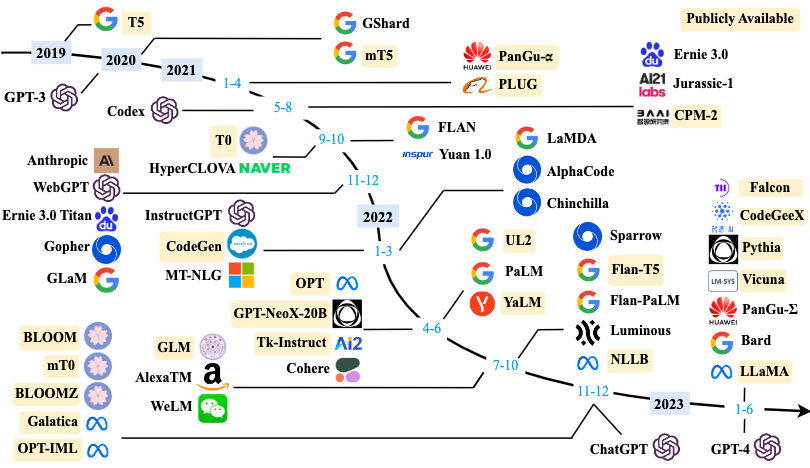
下图是大模型的发展历程:
2.2 大模型的基础——Transformer注意力机制
注意力机制:Transformer的核心创新
创新点1:Transformer模型最大的创新在于提出了注意力机制,这一机制极大地改进了模型学习远距离依赖关系的能力,突破了传统RNN和CNN在处理长序列数据时的局限。
创新点2: 在Transformer出现之前,自然语言处理一般使用RNN或CNN来建模语义信息。但RNN和CNN均面临学习远距离依赖关系的困难:
- RNN的序列处理结构使较早时刻的信息到后期会衰减;
- 而CNN的局部感知也限制了捕捉全局语义信息。
- 这使RNN和CNN在处理长序列时,往往难以充分学习词语之间的远距离依赖。
创新点3:Transformer注意力机制突破了RNN和CNN处理长序列的固有局限,使语言模型能在大规模语料上得到丰富的语言知识预训练。该模块化、可扩展的模型结构也便于通过增加模块数量来扩大模型规模和表达能力,为实现超大参数量提供了可行路径。
Transformer解决了传统模型的长序列处理难题,并给出了可无限扩展的结构,奠定了大模型技术实现的双重基础。
下面是Transformer结构图:

2.3 大模型的预训练-微调范式
大模型代表了一种新的预训练-微调范式,其核心是先用大规模数据集预训练一个极大的参数模型,然后微调应用到具体任务。
这与传统的单任务训练形成了对比,标志着方法论的重大变革。
参数量的倍数增长是大模型最根本的特点,从早期模型的百万量级,发展到现在的十亿甚至百亿量级,实现了与以往数量级的突破。
Transformer架构的提出开启了NLP模型设计的新纪元,它引入了自注意力机制和并行计算思想,极大地提高了模型处理长距离依赖关系的能力,为后续大模型的发展奠定了基础。
正是由于Transformer架构的成功,研究者们意识到模型的架构设计在处理复杂任务和大规模数据中发挥着举足轻重的作用。这一认识激发了研究者进一步扩大模型参数量的兴趣。虽然之前也曾有过扩大参数量的尝试,但因受限于当时模型本身的记忆力等能力,提高参数数量后模型的改进并不明显。
GPT-3的成功充分验证了适度增大参数量能显著提升模型的泛化能力和适应性,由此掀起了大模型研究的热潮。
它凭借过千亿参数量和强大的语言生成能力,成为参数化模型的典范。GPT-3在许多NLP任务上表现亮眼,甚至在少样本或零样本学习中也能取得惊人的效果。
增大参数量的优点:
- 更好的表示能力: 增大参数量使模型能够更好地学习数据中的复杂关系和模式,从而提高模型的表示能力,使其在不同任务上表现更出色。
- 泛化能力和迁移学习:大模型能够从一个领域学习到的知识迁移到另一个领域,实现更好的迁移学习效果,这对于数据稀缺的任务尤其有价值。
- 零样本学习: 增大参数量可以使模型更好地利用已有的知识和模式,从而在零样本学习中取得更好的效果,即使只有很少的示例也能完成任务。
- 创新和探索: 大模型的强大能力可以帮助人们进行更多创新性的实验和探索,挖掘出更多数据中的隐藏信息。
2.4 探索大模型:任务适配性、模型变革与应用前景
与早期的人工智能模型相比,大型模型在参数量上取得了质的飞跃,导致了在复杂任务的建模能力整体上的提升:
- 1)学习能力增强:以应对更复杂的任务;
- 2)泛化能力加强:以实现更广泛的适用性;
- 3)鲁棒性提高;
- 4)具备更高层次认知互动能力:可模拟某些人类能力等。
复杂性、高维度、多样性和个性化要求使得大型模型在某些任务上更易获得出色的建模能力:
- 多模态传感器数据的融合分析,尤其涉及到时序数据的处理,如自动驾驶
- 复杂且动态的目标,需要模型从大规模多样化的数据模式中学习,如金融领域中的量化交易策略优化
- 涉及异构数据源的高维输入空间,如医学图像和报告
- 需要为不同用户或场景进行个性化建模的定制化需求,如智能助理
三、自动驾驶技术迭代路径
3.1 自动驾驶算法核心模块概览
自动驾驶算法模块可分为感知、决策和规划控制三个环节,其中感知模块为关键的组成部分
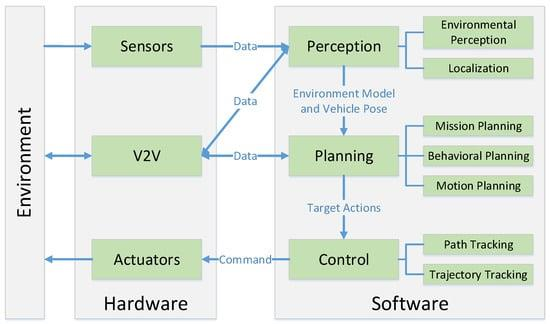
感知模块:感知模块负责解析并理解自动驾驶所处车辆周边的交通环境,是实现自动驾驶的基础和前提,感知模块的精准程度,直接影响并制约着自动驾驶系统的整体安全性和可靠性。
感知模块主要通过摄像头、激光雷达、毫米波雷达等各类传感器获取输入数据,然后通过深度学习等算法,准确解析出道路标线、其他车辆、行人、交通灯、路标等场景元素,以供后续流程使用。
决策和规划控制:与感知模块相比,决策和规划控制等模块的作用更为单一和被动。
这些模块主要依据感知模块输出的环境理解结果,通过算法决策生成驾驶策略,并实时规划车辆的运动轨迹和速度,最终转换为控制命令,以实现自动驾驶。
但是,大模型在车端赋能主要作用于感知和预测环节,逐渐向决策层渗透。
3.2 CNN
2011-2016:CNN引发自动驾驶领域的首次革新浪潮
随着深度学习和计算能力的提升,卷积神经网络(CNN)在图像识别任务上的出色表现引发了自动驾驶领域的首次革新浪潮。
- 2011年,IJCNN的论文《Traffic Sign Recognition with Multi-Scale Convolutional Networks》展示了CNN在交通标志识别方面的潜力;
- 2016年,Nvidia团队发表的《End-to-End Deep Learning for Self-Driving Cars》成为最早将CNN应用于端到端自动驾驶的工作之一。
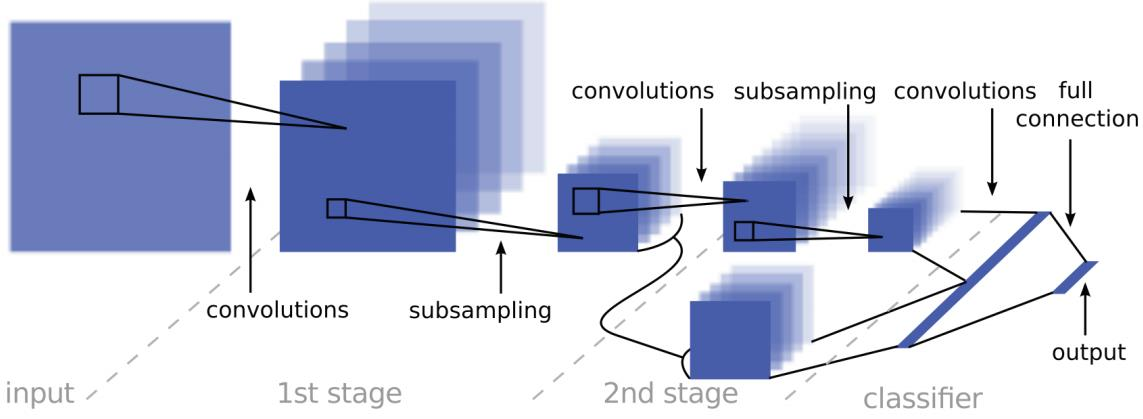
这是一个两阶段的卷积神经网络架构,输入通过两个卷积和子采样阶段进行前馈处理,最终通过线性分类器进行分类。
CNN极大提升了自动驾驶车辆的环境感知能力
- 一方面,CNN在图像识别与处理方面的卓越表现,使车辆能够准确分析道路、交通标志、行人与其他车辆;
- 另一方面,CNN有效处理多种传感器数据的优势,实现了图像、激光雷达等数据的融合,提供全面的环境认知。叠加计算效率的提高,CNN模型进一步获得了实时进行复杂的感知与决策的能力。
但CNN自动驾驶也存在一定局限性:
- 1)需要大量标注驾驶数据进行训练,而获取足够多样化数据具有难度;
- 2)泛化性能有待提高;
- 3)鲁棒性也需要经受更复杂环境的考验;
- 4)时序任务处理能力:相比较而言RNN等其他模型可能更占优势。
3.3 RNN、GAN
2016-2018:RNN和GAN被广泛应用到自动驾驶相关的研究,推动自动驾驶在对应时间区间内快速发展
RNN相较于CNN更适合处理时间序列数据:RNN的循环结构可以建模时间上的动态变化,这对处理自动驾驶中的轨迹预测、行为
分析等时序任务非常有用。例如在目标跟踪、多智能体互动建模等领域,RNN和LSTM(RNN的改进版本)带来了巨大突破,可以
预测车辆未来的运动轨迹,为决策和规划提供支持。
GAN的生成能力缓解自动驾驶系统训练数据不足的问题:GAN可以学习复杂分布,生成高质量的合成数据,为自动驾驶领域带来
了新思路,用于缓解自动驾驶系统训练数据不足的问题。例如GAN可以生成模拟的传感器数据、场景信息,测试自动驾驶算法的
鲁棒性,也可以用于交互式模拟场景生成。
RNN+GAN,可以实现端到端的行为预测和运动规划:RNN负责时序建模,GAN负责数据生成,两者相互协同,可以为自动驾驶系统提供更全面和可靠的环境感知、状态预测和决策支持。
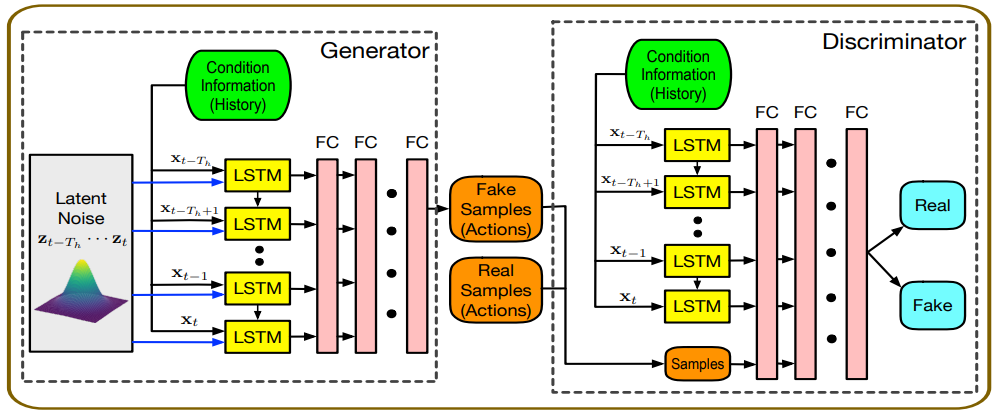
这是融合了LSTM和GAN的模型架构示例。
RNN和GAN仍未解决的问题:
- RNN类模型:长期时序建模能力仍较弱,特别是在处理较长的时间序列数据时可能出现梯度消失或梯度爆炸的问题,限制了它在某些自动驾驶任务上的应用效果。
- GAN模型:生成的数据质量难以控制,很难达到足够逼真的程度。此外,尽管GAN可以生成合成数据,但在实际应用中,它在自动驾驶领域的具体应用仍相对有限。
- 样本效率低:RNN和GAN在样本效率方面仍较低,通常需要大量的真实场景数据来训练和优化模型。而且这些模型难以解释,缺乏对内部决策过程的清晰解释,同时模型的稳定性和可靠性也是需要进一步解决的问题之一。
RNN和GAN在自动驾驶领域应用趋冷的原因:
- 效率和实时性需求: 自动驾驶系统需要在实时性要求较高的情况下做出决策和控制。传统的RNN在处理序列数据时,存在计算效率较低的问题,处理实时感知和决策任务能力有限。
- 复杂性和泛化能力: 自动驾驶涉及复杂多变的交通场景和环境,需要具备强大的泛化能力。然而,传统的RNN可能在处理复杂的时序数据时遇到困难,而无法很好地适应各种交通情况。
- 新兴技术的兴起: 随着深度学习领域的发展,新的模型架构和算法不断涌现,如Transformer架构、强化学习等,这些新技术在处理感知、决策和规划等任务方面可能更加高效和适用。
3.4 BEV
2018-2020:基于鸟瞰视角(BEV)的模型在自动驾驶领域获得了广泛的研究和应用
BEV模型的核心思想是将车辆周围的三维环境数据(如来自激光雷达和摄像头的点云、图像等数据)投影到俯视平面上生成二维的鸟瞰图。这种将三维信息“压平”成二维表示的方式,为自动驾驶系统的环境感知和理解带来了重要优势:
- 鸟瞰图提供了比直接的原始传感器数据更加直观和信息丰富的环境表示,可以更清晰地观察道路、车辆、行人、标志等元素的位置和关系,增强自动驾驶对复杂环境的感知能力
- 全局的俯视视角更有利于路径规划和避障系统进行决策,根据道路和交通状况规划更合理稳定的路径
- BEV模型可以将来自不同传感器的输入数据统一到一个共享表示中,为系统提供更加一致和全面的环境信息
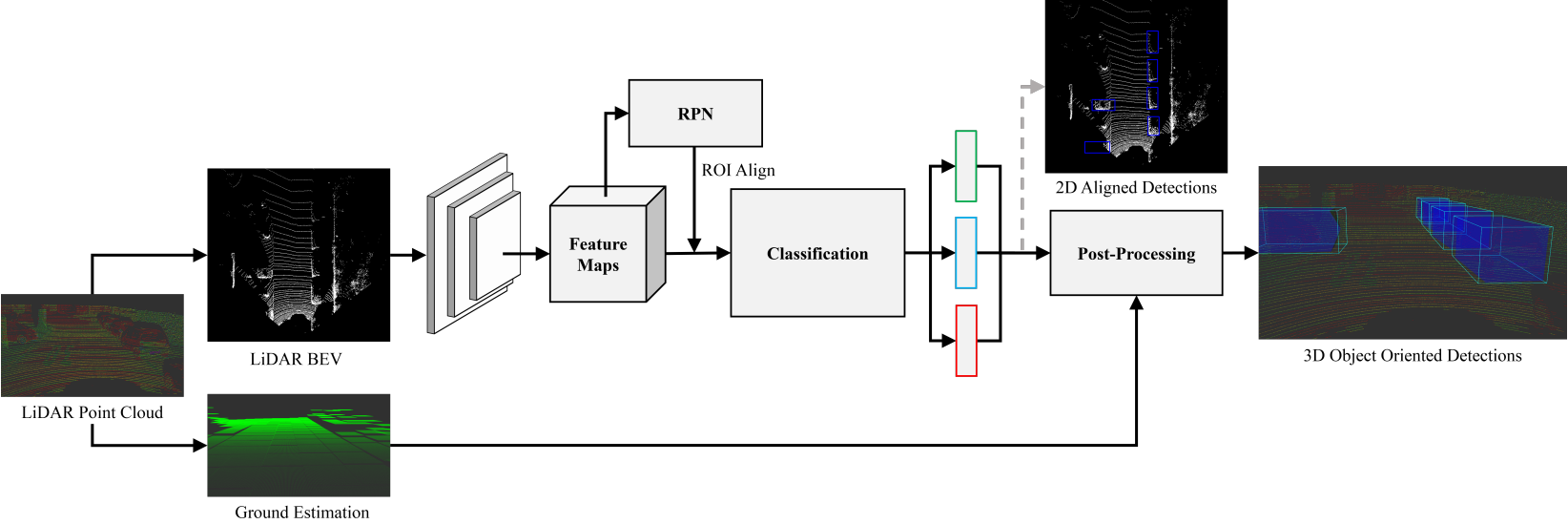
这是BirdNet 3D 对象检测框架,网络的三个输出是:类别(绿色)、2d 边界框(蓝色)和偏航角(红色)。
但是,BEV模型也存在一些问题亟待解决:
- 从原始三维数据生成BEV表示需要进行大量坐标变换和数据处理,增加了计算量和对硬件的要求
- 信息损失问题,三维信息投影到二维时难免会损失一些细节,如遮挡关系等
- 不同传感器到BEV坐标系的转换也需要进行复杂的标定和校准
- 需要研究如何有效融合各种异构数据源,以生成更加准确和完整的BEV
3.5 Transformer+BEV
2020年以来, Transformer+BEV结合正在成为自动驾驶领域的重要共识,推动自动驾驶技术进入崭新发展阶段
将Transformer模型与BEV(鸟瞰视角)表示相结合的方法,正在成为自动驾驶领域的重要共识,推动完全自主驾驶的实现
- 一方面,BEV可以高效表达自动驾驶系统周围的丰富空间信息;
- 另一方面,Transformer在处理序列数据和复杂上下文关系方面展现了独特优势,在自然语言处理等领域得到成功应用。两者结合可以充分利用BEV提供的环境空间信息,以及Transformer在多源异构数据建模方面的能力,实现更精确的环境感知、更长远的运动规划和更全局化的决策。
特斯拉率先引入BEV+Tranformer大模型,与传统2D+CNN小模型相比,大模型的优势主要在于:
- 1)提高感知能力:BEV将激光雷达、雷达和相机等多模态数据融合在同一平面上,可以提供全局视角并消除数据之间的遮挡和重叠问题,提高物体检测和跟踪的精度;
- 2)提高泛化能力:Transformer模型提取特征函数,通过注意力机制寻找事物本身的内在关系,使智能驾驶学会总结归纳而不是机械式学习。主流车企及自动驾驶企业均已布局BEV+Transformer,大模型成为自动驾驶算法的主流趋势。
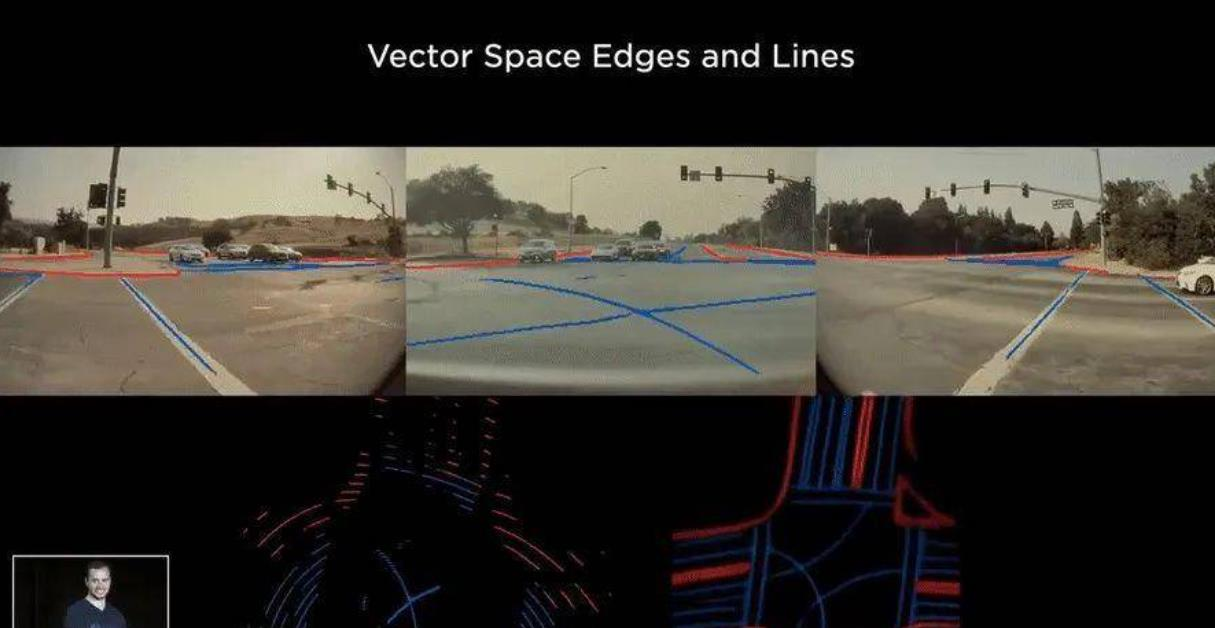
下面是Transformer+BEV的示例框图:
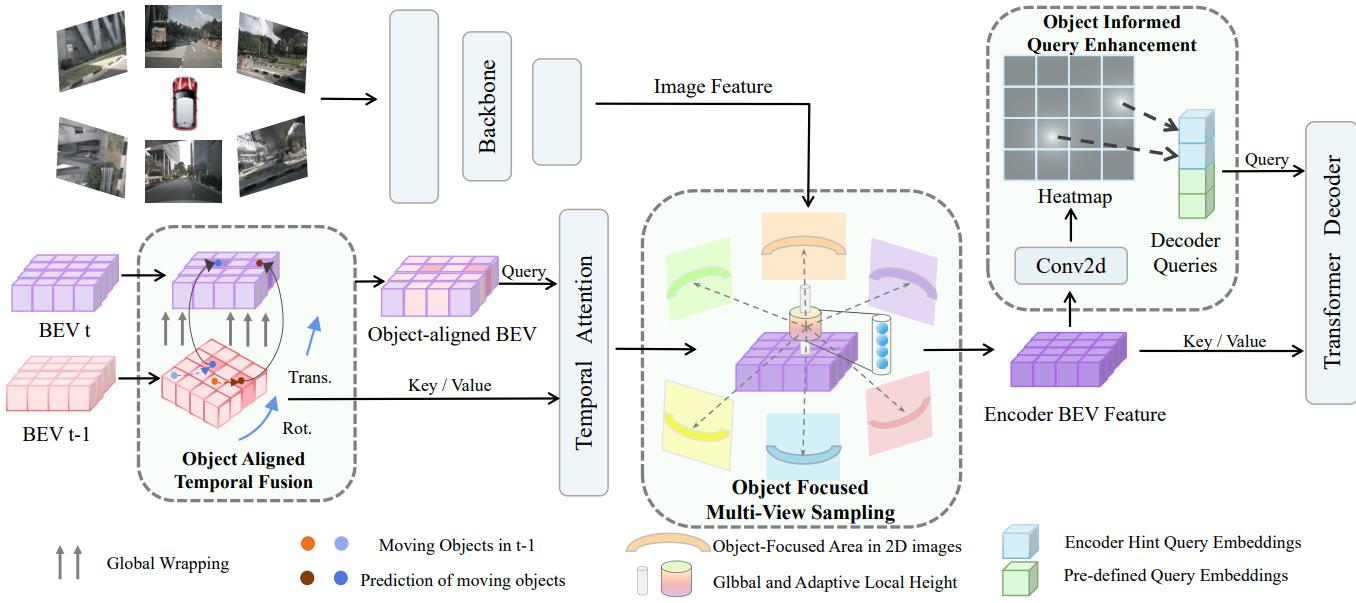
(a) 对象对齐时间融合:首先根据车辆自身的移动情况,把 当前时刻(t时刻)的鸟瞰视角地图变形调整成上一时刻(t-1 时刻)的样子。这样就可以根据对象在上一时刻的位置, 结合速度预测出它当前的位置,从而实现对象在不同时刻 地图上的融合。
(b) 对象聚焦多视图采样:首先在三维空间预设一些点,然后把这些点投影到图像上的特征上。这样不仅可以在整个高度范围采样,还可以对某些主要对象按照自适应和聚焦的方式,在它们所处的局部空间区域采样更多点。
(c) 对象通知查询增强:在编码器处理图像特征后,添加热图的监督信息。同时用检测到对象高置信度位置对应的点 来替换掉原本预设要查询的一些点。
下面是Transformer+BEV的示例框图2:

GPT的出现对Transformer+BEV模型的产生起到了重要影响
- GPT的成功表明了Transformer模型的潜力,促使更多研究者将Transformer应用到计算机视觉和自动驾驶领域,产生了 Transformer+BEV的创新做法。
- GPT的预训练思想为Transformer+BEV的预训练和迁移学习提供了借鉴,可以通过预训练捕捉语义信息,然后迁移应用。 •
- OpenAI公开的代码和模型也加速了Transformer类模型在各领域的研究进程。
当前Transformer+BEV模型受关注,主要基于它综合了Transformer和BEV各自的优势
- Transformer擅长处理序列数据,捕捉语义信息;而BEV提供场景整体观,有利解析空间关系。两者组合可实现互补,增强 对复杂场景的理解表达。
- 自动驾驶数据积累为训练大模型奠定基础。大数据支持学习更复杂特征,提升环境感知精度,也使端到端学习成为可能。
- 提升安全性和泛化能力仍是自动驾驶核心难题。目前阶段Transformer+BEV较好地结合语义理解和多视角建模,可处理相对 不常见、复杂或者挑战性的交通场景或环境,具有很大潜力。
3.6 占用网络模型
2022年,自动驾驶系统中使用了占用网络模型,实现了对道路场景的高效建模
占用网络模型
- 占用网络是特斯拉在2022年应用到自动驾驶感知的一种技术,相较于BEV可以更精准地还原自动驾驶汽车行驶周围3D环境,提升车辆的环境感知能力。
- 占用网络包含两部分:一个编码器学习丰富语义特征,一个解码器可以生成三维场景表达。
- 特斯拉使用车载摄像头采集的大量行车数据,训练占用网络模型。解码器部分能够复原和想象各种场景,增强异常情况下的感知棒性。
- 占用网络技术使特斯拉可以充分利用非标注数据,有效补充标注数据集的不足。这对于提升自动驾驶安全性、减少交通事故具有重要意义。特斯拉正在持续改进该技术在自动驾驶系统中的集成应用。
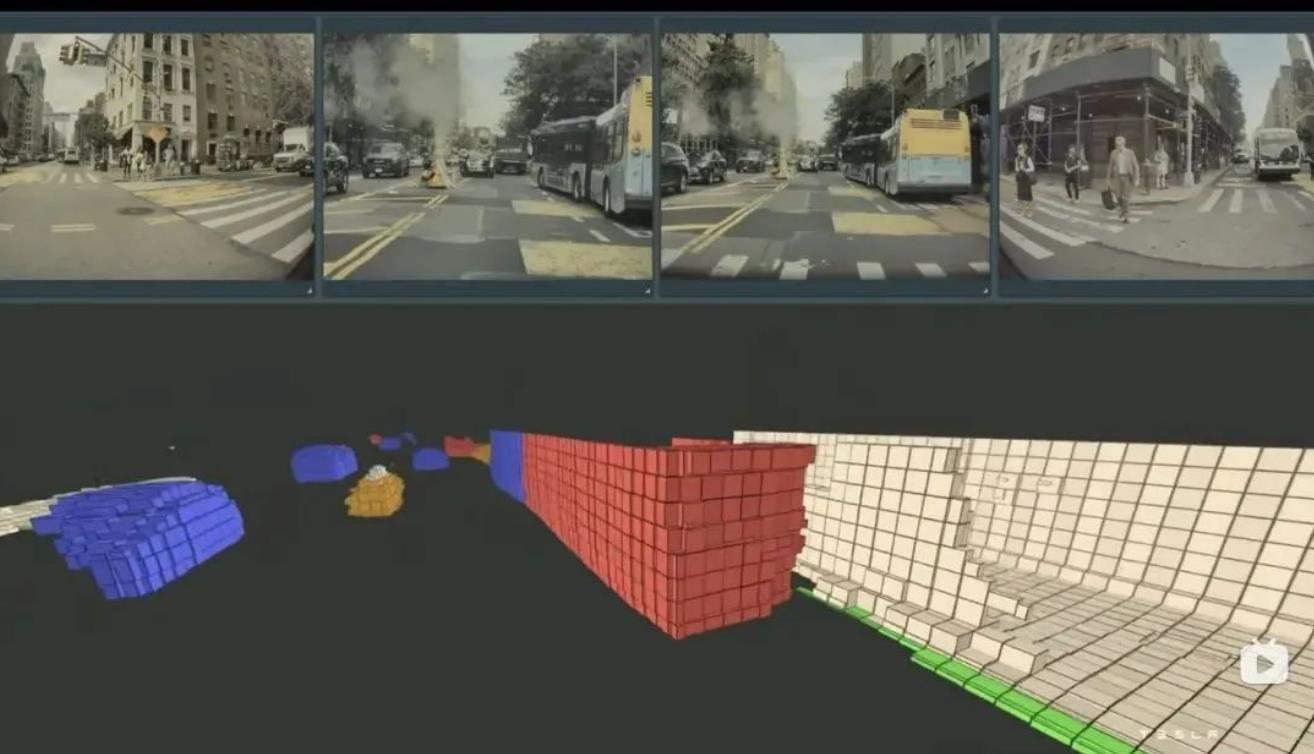
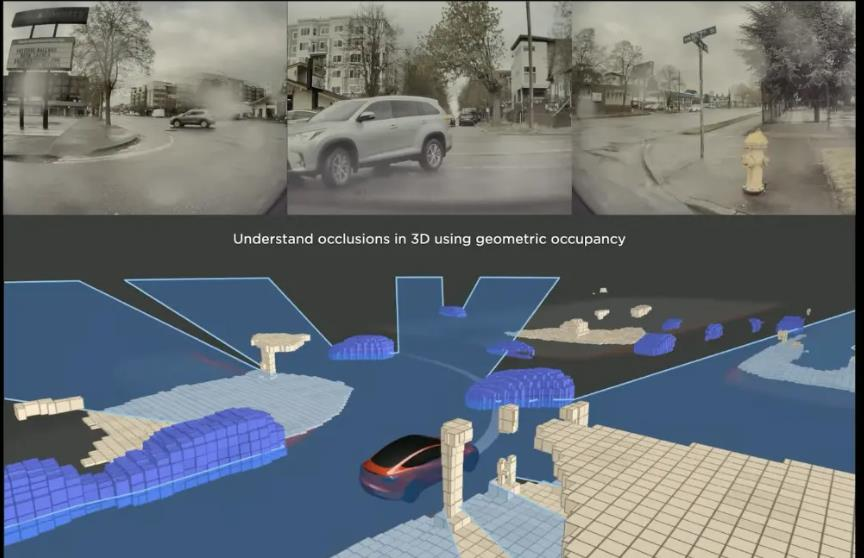
特斯拉在2023年AI Day公开了occupancy network(占用网络)模型,基于学习进行三维重建,意图为更精准地还原自动驾 驶汽车行驶周围3D环境,可视作BEV视图的升华迭代:
- BEV+Transformer的不足:鸟瞰图为2D图像,会缺失一些空间高度信息,无法真实反映物体在3D空间的实际占用体积, 故而在BEV中更关心静止物体(如路沿、车道线等),而空间目标的识别(如物体3D结构)难以识别
- 占用网络:现存三维表示方法(体素、网格、点云)在储存、结构和是否利于学习方面均不够完全理想,而占用网络基于学习将三维曲面表示为深度神经网络分类器的连续决策边界,可以在没有激光雷达提供点云数据的情况下对3D环境进行重建,且相较于激光雷达还可以更好地将感知到的3D几何信息与语义信息融合,得到更加准确的三维场景信息
华为ADS 2.0进一步升级GOD 网络,道路拓扑推理网络进一步增强,类似于特斯拉的占用网络。
- GOD 2.0(通用障碍物检测网络, General Obstacle Detection)障碍物识别无上限,障碍物识别率达到99.9%;
- RCR2.0能识别更多路,感知面积达到2.5个足球场,道路拓扑实时生成。
- 2023年12月,搭载ADS 2.0的问界新M7可实现全国无高精地图的高阶智能驾驶。
对比BEV效果,下面BEV鸟瞰视图
下面是占用网络3D视图:
四、大模型对自动驾驶行业的赋能
4.1 自动驾驶的大模型
以GPT为代表的大模型通常包含亿级甚至百亿级参数,采用Transformer结构进行分布式训练,以提升模型能力。
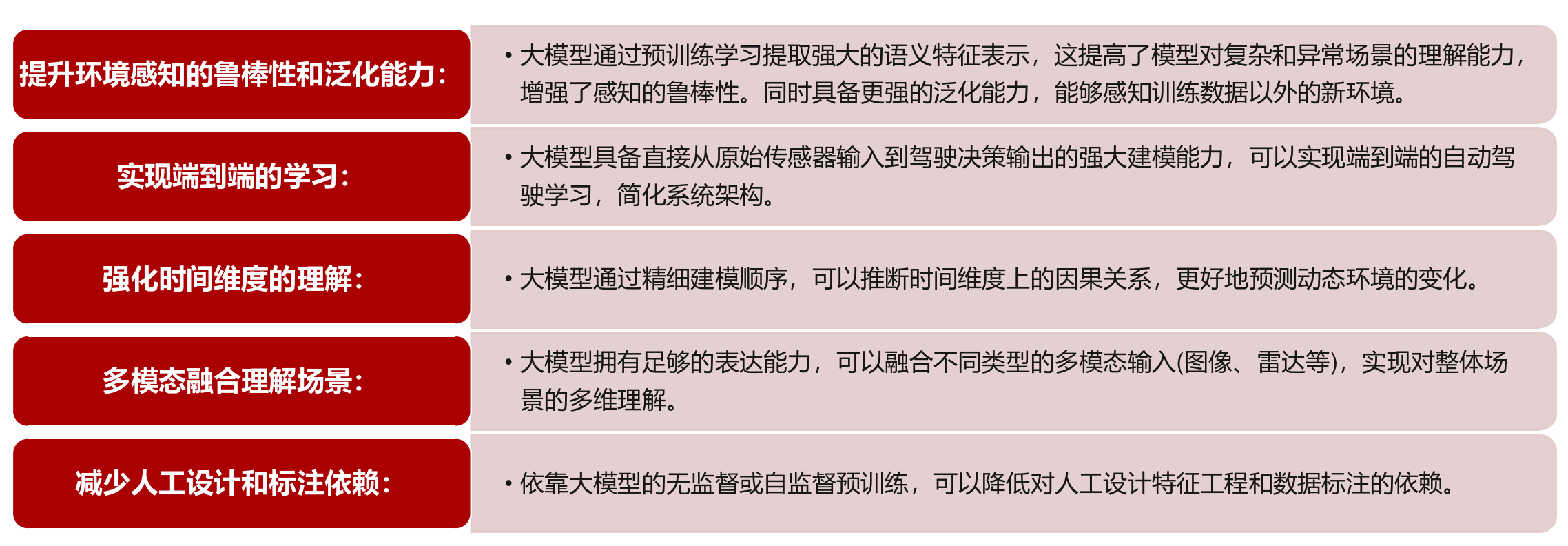
GPT的成功激发了:自动驾驶研究者利用类似架构进行端到端学习,甚至涌现出专为自动驾驶设计的预训练模型。这些努力为自动驾驶行业带来新思路,大模型通过强大的数据分析和模式识别能力,增强了自动驾驶系统的安全性、效率和用户体验,实现了更准确的环境感知、 智能决策。
大模型的应用加速模型端的成熟,为L3/L4级别的自动驾驶技术落地提供了更加明确的预期
模型的成熟使得自动驾驶系统更加稳定和可靠,为商业化应用奠定了基础。随着深度学习和神经网络技术的迅速发展,模型在
感知、决策和控制等方面取得了显著进展,向着高效地处理大量传感器数据,准确识别交通标志、行人、车辆等、实现环境感 知的方向发展。此外,模型也能够辅助实时路径规划和决策制定,使车辆能够在复杂的交通环境中安全行驶。
大模型的应用为L3/L4级别的自动驾驶技术落地提供了更加明确的预期,尤其特斯拉在前沿技术领域的探索,正在成为实现
L3/L4级别自动驾驶落地的风向标。特斯拉提出的Transformer+BEV+占用网络算法让车辆能够更精准地理解复杂的交通环境, 为L3/L4级别的自动驾驶系统提供更强的环境感知能力,从而在城市道路和高速公路等特定场景中更自信地行驶。
国内重要自动驾驶政策节选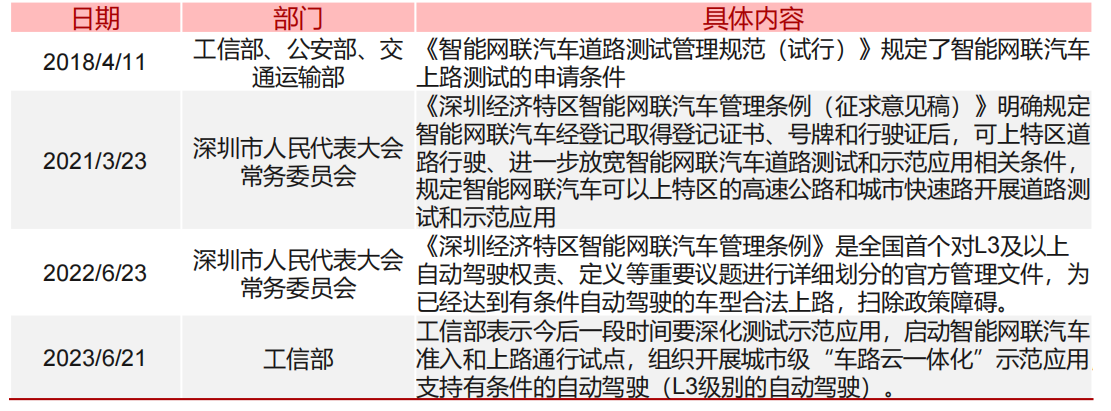
安全性自动驾驶汽车实现商业化落地必不可少的重要因素
为保证自动驾驶系统的安全可靠,按照国家监管要求,自动驾驶车辆必须经过5000公里以上的封闭场地训练评估,且测试
驾驶员须通过不少于50小时培训,并通过车辆安全技术检验后方可申请上路测试资格。目前我国智能网联汽车道路测试总里 程已超7000万公里,我们预计L3级及以上自动驾驶汽车开放个人使用上路试点区域仍需一定的时间才能实现。
汽车通信安全和数据安全也需达到国标或相关条例要求。我们预计未来中国会参考欧美国家实践,进一步细化安全要求,加强相关法规制度建设,如制定自动驾驶汽车安全评估标准、明确自动驾驶系统开发生命周期各阶段的安全保障要求、建立自 动驾驶汽车事故责任认定机制等。
部分自动驾驶汽车安全标准:

4.2 车端赋能主要作用于感知和预测环节,逐渐向决策层渗透
大模型在自动驾驶中的应用简单来说,就是把整车采集到的数据回传到云端,通过云端部署的大模型,对数据进行相近的训练。
大模型主要作用于自动驾驶的感知和预测环节。
- 在感知层,可以利用Transformer模型对BEV数据进行特征提取,实现对障碍物的监测和定位;
- 预测层基于感知模块的输出,利用Transformer模型捕捉学习交通参与者的运动模式和历史轨迹数据,预测他们未来行为和轨迹。
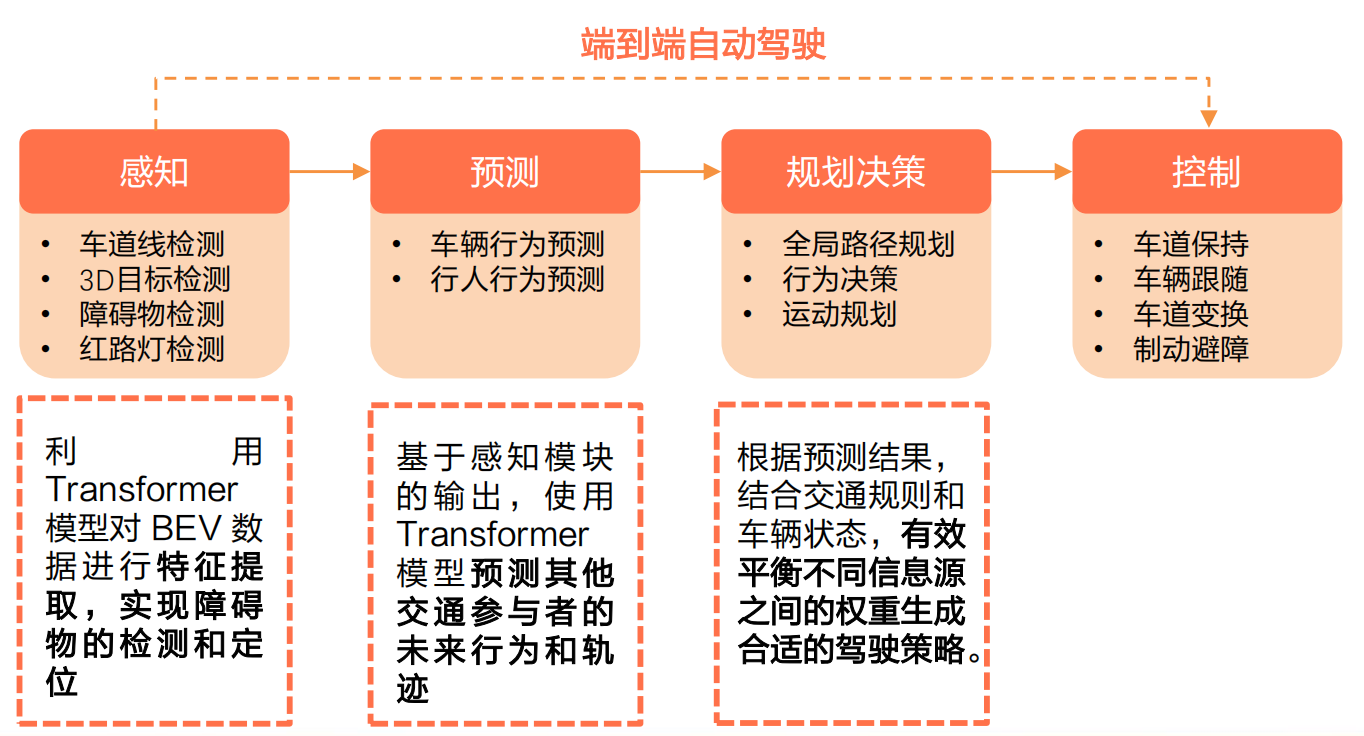
未来将驱动驾驶策略生成逐渐从规则驱动向数据驱动转变。规划决策层的驾驶策略的生成有两种方式:
1)基于数据驱动的深度学习算法;
2)基于规则驱动(出于安全考虑,目前普遍采取基于规则生成驾驶策略,但随着自动驾驶等级的提升及应用场景的不断拓展,基于规则 的规控算法存在较多Corner Case处理局限性)。
结合车辆动力学,可利用Transformer模型生成合适的驾驶策略:
将动态环境、路况信息、 车辆状态等数据整合到模型中,Transformer多头注意力机制有效平衡不同信息源之间的权重,以便快速在复杂环境中做出合理决策。
本文内容来以下资料:
- 1、AI+行业系列之智能驾驶:自动驾驶的“大模型”时代
- 2、智能汽车行业专题研究:大模型应用下自动驾驶赛道将有哪些变化
- 3、2023年行业大模型标准体系及能力架构研究报告
- 4、人工智能行业专题报告:多模态AI研究框架
- 5、AI大时代系列报告之一(基础篇):大模型与算力共振,奇点时刻到来
- 等等......
分享完成,本文只供大家参考与学习,谢谢~
相关文章:
未来之路:大模型技术在自动驾驶的应用与影响
本文深入分析了大模型技术在自动驾驶领域的应用和影响,万字长文,慢慢观看~ 文中首先概述了大模型技术的发展历程,自动驾驶模型的迭代路径,以及大模型在自动驾驶行业中的作用。接着,详细介绍了大模型的基本定义、基础功…...
)
Skywalking流程分析_5(字节码增强)
SkyWalkingAgent.Transformer#transform 此方法就是进行字节码增强的过程 private static class Transformer implements AgentBuilder.Transformer {private PluginFinder pluginFinder;Transformer(PluginFinder pluginFinder) {this.pluginFinder pluginFinder;}Override…...
Windows conan环境搭建
Windows conan环境搭建 1 安装conan1.1 安装依赖软件1.1.1 python安装1.1.2 git bash安装1.1.3 安装Visual Studio Community 20191.1.3.1 选择安装的组件1.1.3.2 选择要支持的工具以及对应的SDK 1.1.4 vscode安装 1.3 验证conan功能1.4 查看conancenter是否包含poco包1.5 查看…...
如何使用Cpolar+Tipask,在ubuntu系统上搭建一个私人问答网站
文章目录 前言2.Tipask网站搭建2.1 Tipask网站下载和安装2.2 Tipask网页测试2.3 cpolar的安装和注册 3. 本地网页发布3.1 Cpolar临时数据隧道3.2 Cpolar稳定隧道(云端设置)3.3 Cpolar稳定隧道(本地设置) 4. 公网访问测试5. 结语 前…...
)
怎么在uni-app中使用Vuex(第一篇)
Vuex简介 vuex的官方网址如下 https://vuex.vuejs.org/zh/ 阅读官网请带着几个问题去阅读: vuex用于什么场景?vuex能给我们带来什么好处?我们为什么要用vuex?vuex如何实现状态集中管理? Vuex用于哪些场景? 组件之…...

【MySQL】库的相关操作 + 库的备份和还原
库的操作 前言正式开始创建数据库删除数据库编码集查看系统默认字符集以及校验规则字符集校验规则 所有支持的字符集和校验规则所有字符集所有校验规则 指明字符集和校验规则创建数据库相同的字符集用不同的校验规则读取会出现什么情况 alter修改数据库show create databasealt…...

网络安全基础之php开发文件上传的实现
前言 php是网络安全学习里必不可少的一环,简单理解php的开发环节能更好的帮助我们去学习php以及其他语言的web漏洞原理 正文 在正常的开发中,文件的功能是必不可少,比如我们在论坛的头像想更改时就涉及到文件的上传等等文件功能。但也会出…...
[文件读取]cuberite 文件读取 (CVE-2019-15516)
1.1漏洞描述 漏洞编号CVE-2019-15516漏洞类型文件上传漏洞等级⭐⭐⭐漏洞环境VULFOCUS攻击方式 描述: Cuberite是一款使用C语言编写的、轻量级、可扩展的多人游戏服务器。 Cuberite 2019-06-11之前版本中存在路径遍历漏洞。该漏洞源于网络系统或产品未能正确地过滤资源或文件路…...
)
SpringBoot 自定义参数校验(5)
文章目录 前言方式一 @Pattern方式二 自定义参数校验Controller层请求示例前言 本文基于SpringBoot 3.1.2,使用自定义参数规则来处理参数校验。 方式一 @Pattern 使用@Pattern,自定义正则表达式,以下是一个校验IP地址的示例: import jakarta.validation.constraints.Not…...

Win Docker Desktop + WSL2 部署PyTorch-CUDA服务至k8s算力集群
Win Docker Desktop WSL2 部署PyTorch-CUDA服务至k8s算力集群 Win Docker Desktop WSL2 安装安装WSL-Ubuntu拉取镜像并测试挂载数据并开放端口导出镜像或导入镜像在k8s集群部署 Win Docker Desktop WSL2 安装 首先根据你的操作系统版本 安装WSL ,记得切换WSL2&a…...
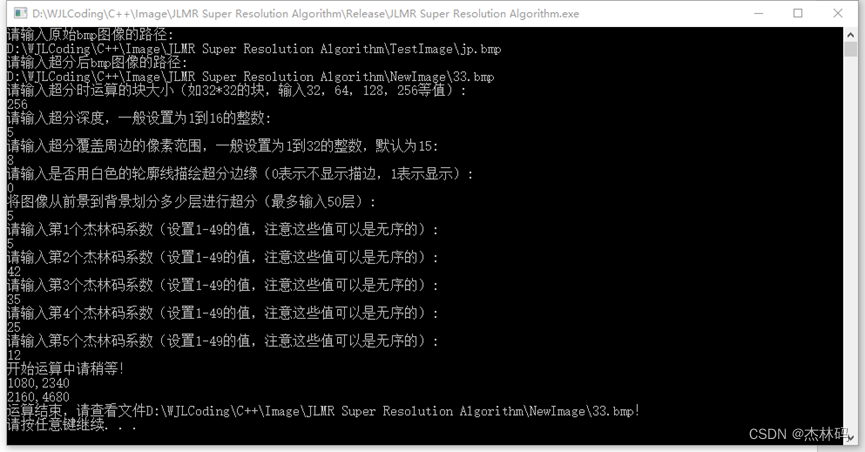
JLMR Micro Super Resolution Algorithm国产微超分算法DEMO
一、简介 目前,做超分算法基本还是以AI训练为主,但是AI基本上都是基于既定场景的训练。而传统的算法基本上都是利用上下文的纹理预测、插值等方案,在图像放大过程中会出现模糊,或马赛克等现象。 我们基于加权概率模型,…...
Docker的安装配置与使用
1、docker安装与启动 首先你要保证虚拟机所在的盘要有至少20G的空间,因为docker开容器很吃空间的,其次是已经安装了yum依赖 yum install -y epel-release yum install docker-io # 安装docker配置文件 /etc/sysconfig/docker chkconfig docker on # 加…...
macOS文本编辑器 BBEdit 最新 for mac
BBEdit是一款功能强大的文本编辑器,适用于Mac操作系统。它由Bare Bones Software开发,旨在为开发者和写作人员提供专业级的文本编辑工具。 以下是BBEdit的一些主要特点和功能: 多语言支持:BBEdit支持多种编程语言和标记语言&…...
)
Android Audio实战——音量设置Hal(二十)
本来上一篇分析音量设置中对于 setCurrentGainIndex 方法我们分析到了 native 层就没有往下分析,但这这里还有准备再看看下面的流程。 一、源码分析 1、android_media_AudioSystem.cpp 源码位置:frameworks/base/core/jni/android_media_AudioSystem.cpp static jint and…...

jetson配置笔记
typora-root-url: /home/msj/ubuntu笔记本台式机环境配置说明/images Ubuntu18.04 配置 说明:我们所有文档配置都是按照ubuntu18.04,保证x86架构(笔记本台式机)和 ARM架构(jetson Nano只能安装18.04)的一致性 1. 更换各类源 我们所有源都更换清华源&a…...
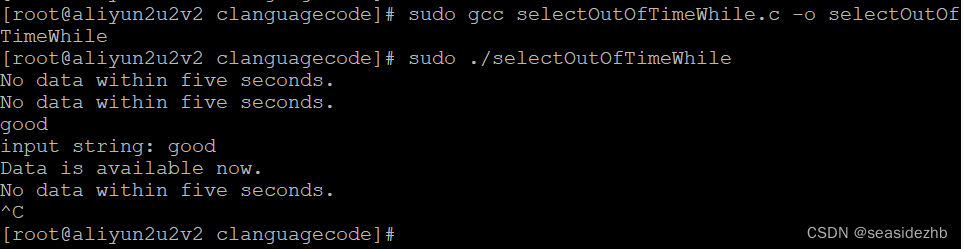
使用select实现定时任务
selectOutOfTime.c里边的代码如下: #include<stdio.h> #include<sys/time.h> #include<sys/types.h> #include<unistd.h> #include <string.h>#define BUF_SIZE 100int main(void){fd_set reads;struct timeval tv;int errorNum;cha…...

uniapp的实战总结大全
🙂博主:冰海恋雨 🙂文章核心:uniapp部分总结 目录 编辑 目录 前言: 解决方案 1. 跨平台开发 2. Vue.js生态 3. 组件库 4. 自定义组件 5. Native能力 6. 插件生态 7. 性能优化 写法 1. 模板…...
No205.精选前端面试题,享受每天的挑战和学习
🤍 前端开发工程师(主业)、技术博主(副业)、已过CET6 🍨 阿珊和她的猫_CSDN个人主页 🕠 牛客高级专题作者、在牛客打造高质量专栏《前端面试必备》 🍚 蓝桥云课签约作者、已在蓝桥云课上架的前后端实战课程《Vue.js 和 Egg.js 开发企业级健康管理项目》、《带你从入…...

保序回归:拯救你的校准曲线(APP)
保序回归:拯救你的校准曲线(APP) 校准曲线之所以是评价模型效能的重要指标是因为,校准曲线衡量模型预测概率与实际发生概率之间的一致性,它可以帮助我们了解模型的预测结果是否可信。一个理想的模型应该能够准确地预测…...

清华镜像源地址,适用于pip下载速度过慢从而导致下载失败的问题
清华地址 https://pypi.tuna.tsinghua.edu.cn/simple下载各种各样的包的指令模板 pip install XXX -i https://pypi.tuna.tsinghua.edu.cn/simple这样就行了,XXX代表的是你将要下载的包名称。 比如: pip install opencv-python -i https://pypi.tuna.…...
两两交换链表中的节点)
力扣HOT100(30)两两交换链表中的节点
链表的交换要注意 “链表不断链”。前驱和后继都要连着迭代法(必学死磕!O (n) 时间,O (1) 空间)1. 为什么必须用虚拟头节点?因为交换后链表的头节点会变! 比如示例 1 中,原来的头是 1࿰…...

3步深度解锁:网络设备权限管理工具的实战手册
3步深度解锁:网络设备权限管理工具的实战手册 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 你是否曾面对功能受限的网络设备感到束手无策?当默认配置锁死了硬…...

【紧急预警】Lindy衰减临界点已提前至第8.3个月!2024最新《营销自动化寿命健康度白皮书》限时开放前500份
更多请点击: https://kaifayun.com 第一章:Lindy衰减临界点的理论重构与实证突破 Lindy效应传统上描述“越老越长寿”的非线性生存规律,但其在现代软件系统、开源生态与协议层技术栈中的适用边界正遭遇结构性挑战。本文首次将Lindy模型从静…...

Keil µVision链接器错误204解决方案
1. 问题现象与背景解析最近在使用Keil Vision进行嵌入式开发时,不少工程师遇到了一个令人头疼的链接器错误。具体表现为编译时出现"FATAL ERROR 204: INVALID KEYWORD"的致命错误,错误位置指向链接器控制文件中的特定行。这个问题在C166和C51两…...

深度解析DeTikZify:科研工作者的智能图表生成神器
深度解析DeTikZify:科研工作者的智能图表生成神器 【免费下载链接】DeTikZify Synthesizing Graphics Programs for Scientific Figures and Sketches with TikZ. 项目地址: https://gitcode.com/gh_mirrors/de/DeTikZify 在科研工作中,创建高质量…...
适合全体毕业生)
口碑最好的AI论文写作工具推荐(从文献整理到论文成稿全流程)适合全体毕业生
还在为选题方向纠结、文献资料翻找耗时、开题报告无从下手、论文框架反复修改、查重率居高不下、降重过程痛苦不堪,甚至答辩PPT还要临时抱佛脚?作为学术新手、应届生或本科硕士毕业生,面对论文写作的重重关卡,流程复杂、操作门槛高…...

LeagueAkari:英雄联盟终极自动化助手革命性指南
LeagueAkari:英雄联盟终极自动化助手革命性指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 你是否在英雄联盟游戏中反复经历这…...

手机也能玩转无人机仿真:用安卓QGC App连接同一WiFi下的PX4 JMAVSim模拟器
手机也能玩转无人机仿真:用安卓QGC App连接同一WiFi下的PX4 JMAVSim模拟器 无人机开发者和爱好者们,是否曾想过用手机就能完成整个无人机仿真测试流程?告别笨重的电脑束缚,只需一部安卓设备,就能在沙发上调试飞控算法。…...

告别KITTI!用TartanAir数据集在Unreal Engine+AirSim里复现那些让VSLAM算法“翻车”的雨天和黑夜
超越KITTI:用TartanAir数据集在虚拟极端环境中锤炼VSLAM算法当视觉SLAM算法在KITTI数据集上取得95%的准确率时,开发者们常常会松一口气——直到这些算法被部署到真实世界的雨夜街道上。突然之间,那些在阳光明媚的德国道路上表现优异的特征点检…...

解决claude code频繁封号与token不足的taotoken接入方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 解决Claude Code频繁封号与Token不足的Taotoken接入方案 1. 问题背景:Claude Code用户面临的挑战 对于依赖Claude Cod…...