离散卡尔曼滤波器算法详解及重要参数(Q、R、P)的讨论
- 公开数据集中文版详细描述参考前文:https://editor.csdn.net/md/?not_checkout=1&spm=1011.2124.3001.6192
- 神经元Spike信号分析参考前文:https://blog.csdn.net/qq_43811536/article/details/134359566?spm=1001.2014.3001.5501
- 神经元运动调制分析参考前文:https://blog.csdn.net/qq_43811536/article/details/134401004?spm=1001.2014.3001.5501
目录
- 摘要
- 1. 离散卡尔曼滤波器算法
- 1.1 理论概述
- 1.2 算法细节
- 2. 神经元的运动解码分析
- 2.1 公开数据集
- 2.2 Q、R、P 的定义及初值设置
- 2.3 KF 的解码结果
- 2.4 不同Q、R、P 初始值对计算结果的影响
摘要
1960年,卡尔曼发表了他著名的用递归方法解决离散数据线性滤波问题的论文。从那以后,得益于数字计算技术的进步,卡尔曼滤波器已成为推广研究和应用的主题,尤其是在自主或协助导航领域。
卡尔曼滤波器由一系列递归数学公式描述。它们提供了一种高效可计算的方法来估计过程的状态,并使估计均方误差最小。卡尔曼滤波器应用广泛且功能强大:它可以估计信号的过去和当前状态,甚至能估计将来的状态,即使并不知道模型的确切性质。
本文简单介绍了离散卡尔曼滤波器(以下简称“KF”)的计算理论,同时基于猕猴感觉运动皮层神经元的运动解码分析讨论KF的三个重要参数Q、R、P对算法的影响。
1. 离散卡尔曼滤波器算法
1.1 理论概述
卡尔曼滤波器用反馈控制的方法估计过程状态:滤波器估计过程某一时刻的状态,然后以(含噪声的)测量变量的方式获得反馈。因此卡尔曼滤波器可分为两个部分:时间更新方程和测量更新方程。时间更新方程负责及时向前推算当前状态变量和误差协方差估计的值,以便为下一个时间状态构造先验估计。测量更新方程负责反馈——也就是说,它将先验估计和新的测量变量结合以构造改进的后验估计。
1.2 算法细节
-
时间更新方程也可视为预估方程,测量更新方程可视为校正方程,分别对应 Figure 1中的“时间更新(预测)”和“测量更新(校正)”。最后的估计算法成为一种具有数值解的预估-校正算法。
-
实际系统中,过程激励噪声协方差矩阵
Q和观测噪声协方差矩阵R可能会随每次迭代计算而变化。但在这儿我们假设它们是常数。 -
测量更新方程首先做的是计算卡尔曼增益 K k K_k Kk,其次便测量输出以获得 z k z_k zk ,然后按(2)式产生状态的后验估计。最后按(3)式估计状态的后验协方差。
-
计算完时间更新方程和测量更新方程,整个过程再次重复。上一次计算得到的后验估计被作为下一次计算的先验估计。这种递归推算是卡尔曼滤波器最吸引人的特性之一——它比其它滤波器更容易实现:例如维纳滤波器1 ,每次估计必须直接计算全部数据,而卡尔曼滤波器每次只根据以前的测量变量递归计算当前的状态估计。

2. 神经元的运动解码分析
2.1 公开数据集
- 网址:Nonhuman Primate Reaching with Multichannel Sensorimotor Cortex Electrophysiology 2
- Session:
- " indy_20170124_01 "
2.2 Q、R、P 的定义及初值设置
- Q:Q矩阵表示系统模型中过程噪声的协方差矩阵。它描述了系统状态在时间上的变化和不确定性。通常情况下,Q矩阵的初始值可以根据系统的动态范围和预期的噪声水平进行估计。本实验中Q的初始值为卡尔曼滤波器训练过程中转移矩阵的协方差。
- R:R矩阵表示测量模型中观测噪声的协方差矩阵。它描述了观测值和系统真实状态之间的不一致性或不确定性。R矩阵的初始值可以通过对测量数据进行统计分析来估计。本实验中R的初始值为卡尔曼滤波器训练过程中观测数据(测量矩阵)的协方差。
- P:P矩阵表示状态估计的协方差矩阵,它描述了状态估计和真实状态之间的不确定性。P矩阵的初始值可以根据系统的初始状态估计精度进行设置。本实验中P的初始值为零矩阵,表示对初始状态估计的高置信度。
2.3 KF 的解码结果
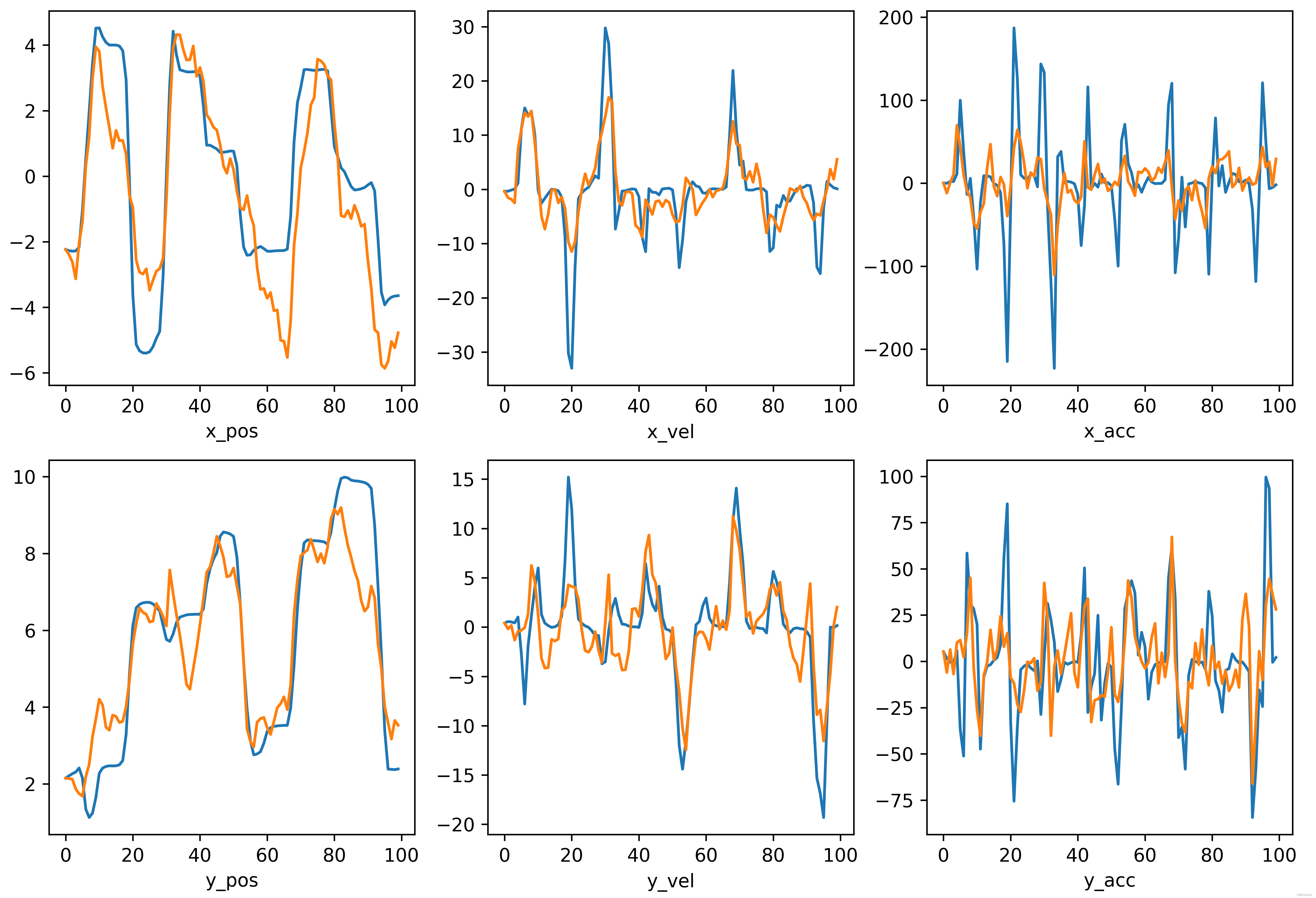
使用2.2节中 Q、R、P 的初始值设置卡尔曼滤波器对公开数据集" indy_20170124_01 "进行解码,并采用十折交叉验证进行评估,Figure 2 为第4折上前100个样本的真实(蓝色)和预测(黄色)曲线,上下分别代表x和y方向上的位置、速度和加速度。
2.4 不同Q、R、P 初始值对计算结果的影响
Figure 3 展示了Q、R、P分别为上一节默认取值(Figure 3a)和高斯噪声(Figure 3b-d)时的部分解码结果,每一个子图从左到右由十折交叉验证中的第1、5、10折组成。可以看到R的取值对结果影响最大,只要不合理就会导致预测结果无意义;而P的取值影响最小,预测结果仅在前几个sample上会出现较大幅度的波动。
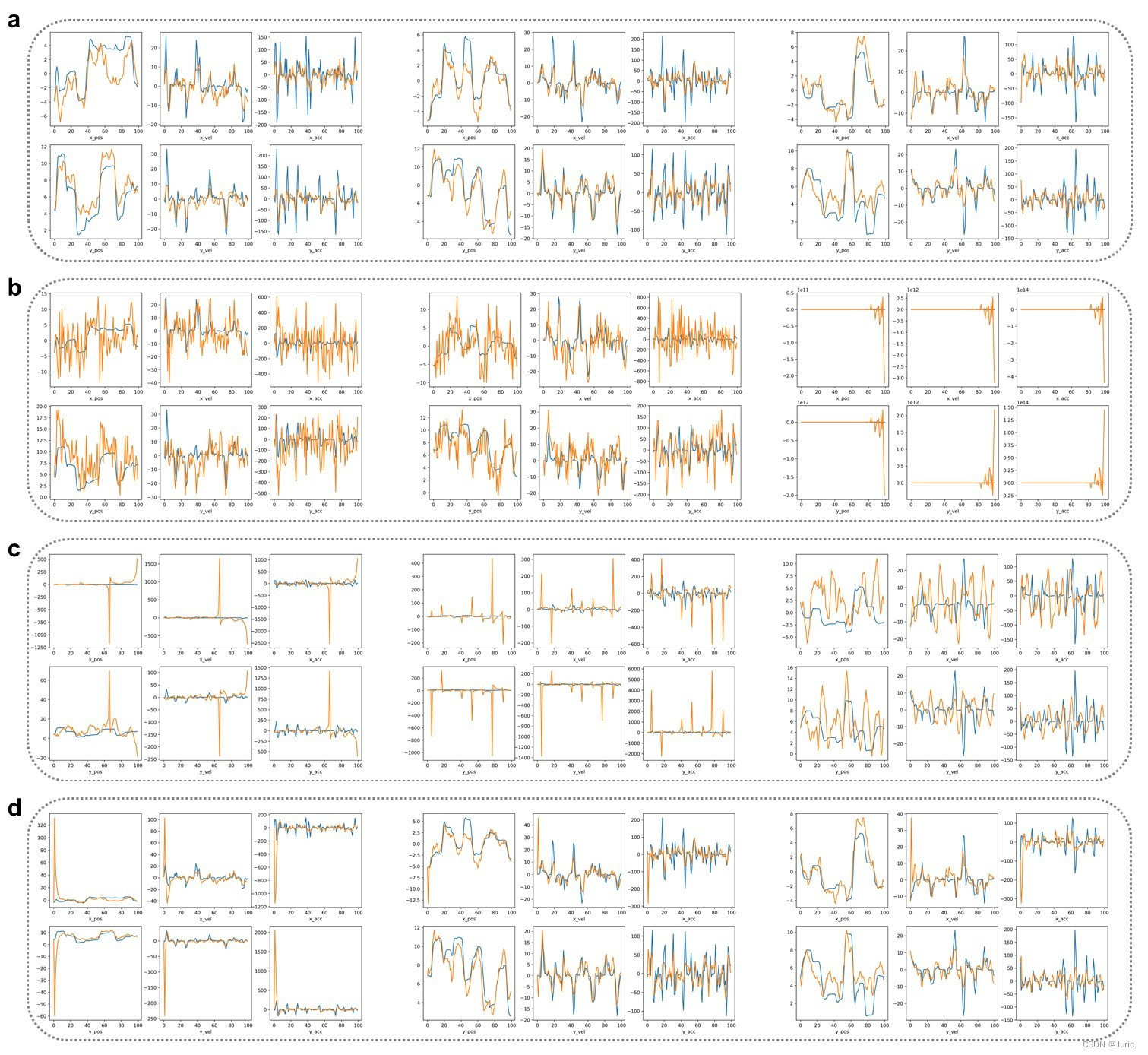
Table 1 记录了设置不同Q、R、P 初始值时卡尔曼滤波器的解码性能,其中 d i a g ( n ) diag(n) diag(n)代表对角元素为n的对角矩阵。这些结果进一步证明上一段的结论,同时P设置为对角矩阵时可以最大程度地保持解码器的性能。

Brown, R. G. and P. Y. C. Hwang. 1992. Introduction to Random Signals and Applied Kalman Filtering, Second Edition, John Wiley & Sons, Inc. ↩︎
Makin, J. G., O’Doherty, J. E., Cardoso, M. M. B. & Sabes, P. N. (2018). Superior arm-movement decoding from cortex with a new, unsupervised-learning algorithm. J Neural Eng. 15(2): 026010. doi:10.1088/1741-2552/aa9e95 ↩︎
相关文章:
离散卡尔曼滤波器算法详解及重要参数(Q、R、P)的讨论
公开数据集中文版详细描述参考前文:https://editor.csdn.net/md/?not_checkout1&spm1011.2124.3001.6192神经元Spike信号分析参考前文:https://blog.csdn.net/qq_43811536/article/details/134359566?spm1001.2014.3001.5501神经元运动调制分析参考…...

伊朗黑客对以色列科技行业发起恶意软件攻击
最近,安全研究人员发现了一场由“Imperial Kitten”发起的新攻击活动,目标是运输、物流和科技公司。 “Imperial Kitten”又被称为“Tortoiseshell”、“TA456”、“Crimson Sandstorm”和“Yellow Liderc”,多年来一直使用“Marcella Flore…...

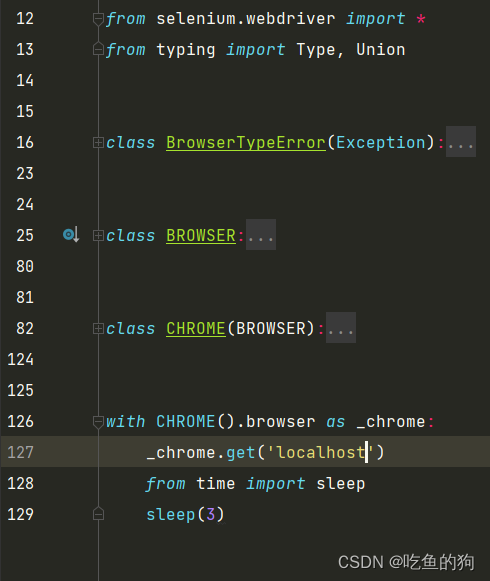
selenium报错:没有打开网页或selenium.common.exceptions.NoSuchDriverException
文章目录 问题解决方法 问题 当selenium的环境配置没有问题,但在使用selenium访问浏览器时并没有打开网页,或者出现selenium.common.exceptions.NoSuchDriverException报错信息(如下图所示)。 以上问题可能的原因是没有配置chrom…...

Java开源工具库使用之线上监控诊断库Arthas
文章目录 前言一、介绍1.1 功能1.2 原理 二、安装使用2.1 下载2.2 使用 三、常用3.1 实时查看3.2 追踪查看3.3 辅助命令3.4 热更新3.5 监控 四、实战4.1 CPU/内存占用过高4.2 接口耗时高4.3 找到类所在jar4.4 查找类的实例4.5 生成火焰图 参考 前言 在现代软件开发中ÿ…...
Nodejs操作缓存数据库-Redis
Hi I’m Shendi Nodejs专栏 Nodejs操作缓存数据库-Redis 在服务端开发中,缓存数据库也是不可或缺的,可以提高程序并发以及方便后续扩展,而目前最常用的莫过于Redis了 安装依赖 和之前的mysql一样,redis的依赖最常用的就是redis …...

Springboot项目全局异常处理
1.ErrorCode.java package com.hng.config.exception.error;/*** Author: 郝南过* Description: TODO* Date: 2023/11/14 10:56* Version: 1.0*/ public interface ErrorCode {String getCode();String getMessage(); }2.ErrorEnum.java package com.hng.config.exception.er…...

算法笔记-第七章-栈的应用(未完成)
算法笔记-第七章-栈的应用 栈的基本常识栈的解释一栈的解释二 栈的操作序列合法的出栈序列可能的出栈序列补充知识点 后缀表达式(无优先级) 栈的基本常识 栈(Stack)是只允许在一端进行插入或删除操作的线性表。 栈的解释一 栈的…...

Linux socket编程(3):利用fork实现服务端与多个客户端建立连接
上一节,我们实现了一个客户端/服务端的Socket通信的代码,在这个例子中,客户端连接上服务端后发送一个字符串,而服务端接收到字符串并打印出来后就关闭所有套接字并退出了。 上一节的代码较为简单,在实际的应用中&…...

若依Linux与Docker集群部署
若依Linux集群部署 1. 若依2.MYSQL Linux环境安装2.1 MYSQL数据库部署和安装2.2 解压MYSQL安装包2.3 创建MYSQL⽤户和⽤户组2.4 修改MYSQL⽬录的归属⽤户2.5 准备MYSQL的配置⽂件2.6 正式开始安装MYSQL2.7 复制启动脚本到资源⽬录2.8 设置MYSQL系统服务并开启⾃启2.9 启动MYSQL…...

20.2 设备树中的 platform 驱动编写
一、设备树下的 platform 驱动 platform 驱动框架分为总线、设备和驱动,总线不需要我们去管理,这个是 Linux 内核提供。在有了设备树的前提下,我们只需要实现 platform_driver 即可。 1. 修改 pinctrl-stm32.c 文件 先复习一下 pinctrl 子系…...
C++实现ransac
目录 一、ransac算法原理 1.1、算法概念 1.2、图解 二、c实现ransac 2.1、设置随机样本和离群点 2.2、随机抽取样本 2.3、内点计算 2.4、更新参数 2.2、完整代码 一、ransac算法原理 1.1、算法概念 随机抽样一致性 (RANSAC) 是一种迭代方法,用于根据一组包…...
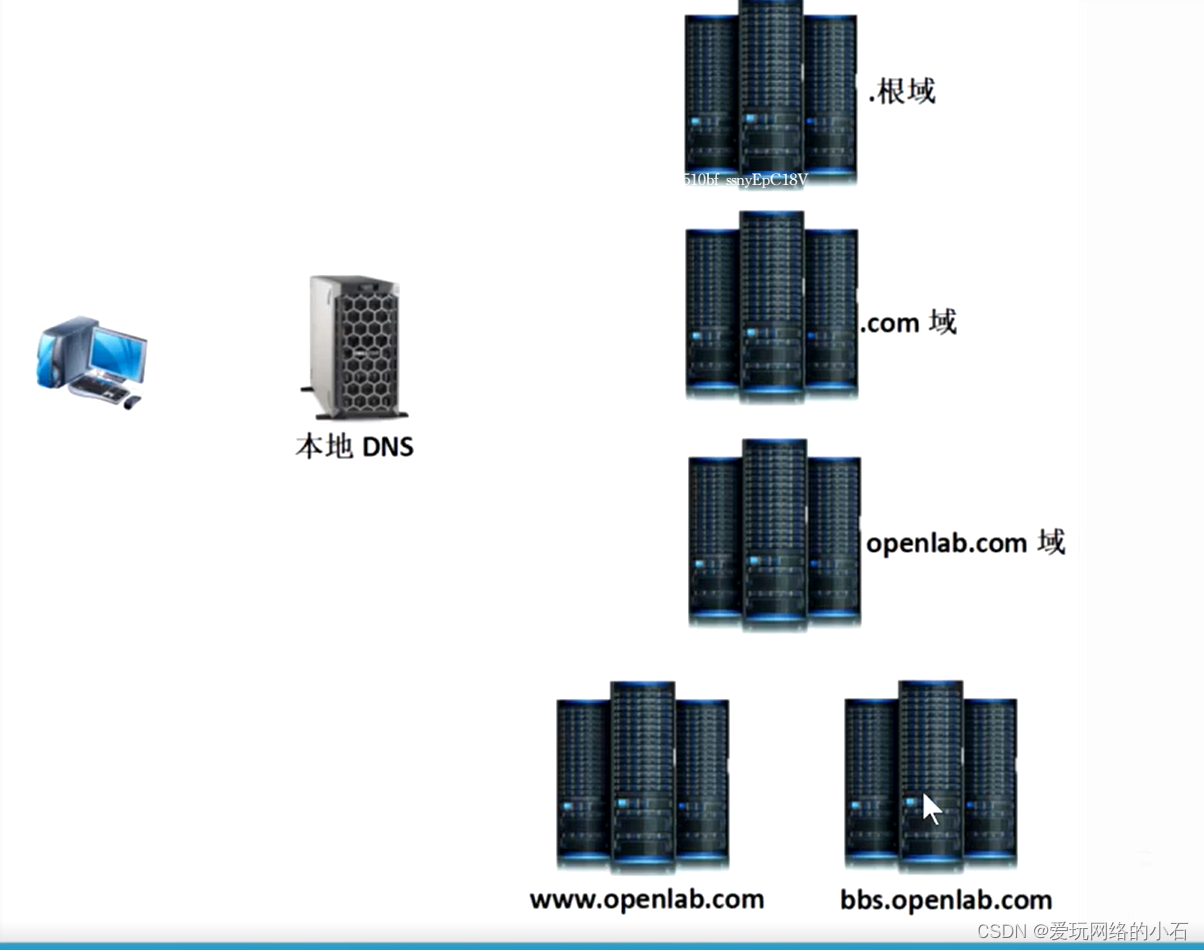
DNS域名解析服务
1.概述 1.1.产生原因 IP 地址:是互联网上计算机唯一的逻辑地址,通过IP 地址实现不同计算机之间的相互通信,每台联网计算机都需要通过I 地址来互相联系和分别,但由于P 地址是由一串容易混淆的数字串构成,人们很难记忆所有计算机的…...
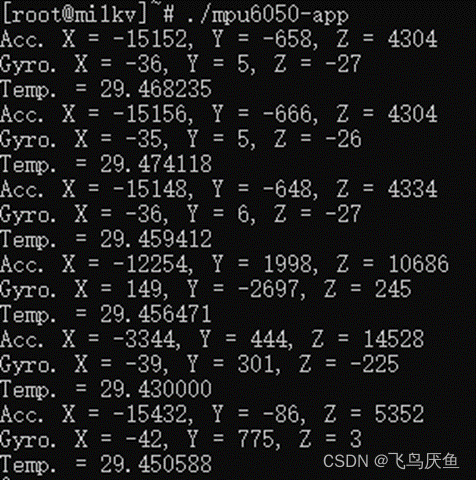
【milkv】2、mpu6050驱动添加及测试
前言 本章介绍mpu6050的驱动添加以及测试。 其中驱动没有采用sdk提供的驱动,一方面需要配置irq,另一方面可以学习下如何通过ko方式添加驱动。 一、参考文章 驱动及测试文件编译流程: https://community.milkv.io/t/risc-v-milk-v-lsm6ds…...
SpringCloud Alibaba(中):服务熔断降级-Sentinel
Sentinel Sentinel是阿里巴巴开源的分布式系统流量防卫防护组件,主要对分布式系统中的流量进行控制、熔断降级等保护操作。Sentinel的目标是成为互联网级别分布式系统的流量防卫防护组件,它与系统的各个部分集成,保护着系统的入口和出口。 …...

模型的训练专题
训练目标在数学上指定了模型应该如何从训练数据中学习和获取能力。训练基础模型的当前现状涉及特定于模型的目标。我们设想,未来基础模型的训练目标将反映两个变化:从系统证据和评估中得出的原则性选择,以及跨数据源和模式提供丰富、可扩展和…...

深入解析 Azure 机器学习平台:架构与组成部分
Azure机器学习平台是Microsoft Azure提供的一种云上机器学习服务,为开发者和数据科学家提供了一个全面且易于使用的环境来创建、训练、部署和管理机器学习模型。本文将对Azure机器学习平台的基本架构和组成部分进行深入解析,帮助读者全面了解该平台的工作…...

使用百度语音识别技术实现文字转语音的Java应用
探讨如何使用百度语音识别技术将文字转换为语音的Java应用。百度语音识别技术是一种强大的语音识别服务,可以将输入的文字转换为自然流畅的语音输出。我们将使用Java编程语言来实现这个应用,并提供相应的源代码。 首先,我们需要准备一些前提…...

【C#学习】文件操作
文章目录 常见操作拷贝文件检测文件夹是否存在并创建判断文件是否存在删除文件夹下的所有文件保留文件夹获取指定目录下的所有文件名删除 常见操作 拷贝文件 System.IO.File.Copy(sourcePath, targetPath); 检测文件夹是否存在并创建 //if directory not exit,then establis…...
Chrome版本对应Selenium版本
1.获得浏览器版本号和驱动 浏览器版本: 119.0.6045.124 浏览器驱动版本: 119.0.6043.1 / 120.0.6051.0 访问 https://vikyd.github.io/download-chromium-history-version/ 2. 安装selenium pip install selenium4.1.1 -i http://pypi.mirrors.ustc.edu.cn/simple/ --trusted…...
Day29力扣打卡
打卡记录 美丽塔 II(前后缀分解 单调栈) 链接 大佬的题解 class Solution:def maximumSumOfHeights(self, a: List[int]) -> int:n len(a)suf [0] * (n 1)st [n] # 哨兵s 0for i in range(n - 1, -1, -1):x a[i]while len(st) > 1 and …...

嵌入式快速原型开发:基于Sceptre平台与LPC2148的实战指南
1. 项目概述:Sceptre,一个被低估的嵌入式快速原型利器 在嵌入式开发的世界里,我们总是在寻找那个“刚刚好”的平台:它要足够强大,能跑复杂的算法;要足够小巧,能塞进各种外壳;要足够便…...

告别浪费!SolidWorks企业级共享方案,实现降本增效全攻略
还在为 SolidWorks 高昂的硬件投入和混乱的图纸管理头疼?告别“一人一机”的浪费模式,企业级共享方案才是降本增效的正解。这套攻略基于“1 台高性能服务器 云飞云共享云桌面”架构,帮你把硬件成本砍掉 60%,把软件利用率翻倍。一…...
)
ROS Noetic实战:从bag包里‘抠’出雷达点云和IMU数据的保姆级教程(Ubuntu 20.04)
ROS Noetic实战:从bag包里提取雷达点云和IMU数据的完整指南(Ubuntu 20.04)在机器人开发中,ROS bag文件就像是一个装满珍贵数据的宝箱,而雷达点云和IMU数据则是其中最闪亮的宝石。作为一名长期与ROS打交道的开发者&…...

如何在3分钟内为任何活动搭建专业级滚动抽奖系统?Magpie-LuckyDraw全平台开源方案深度解析
如何在3分钟内为任何活动搭建专业级滚动抽奖系统?Magpie-LuckyDraw全平台开源方案深度解析 【免费下载链接】Magpie-LuckyDraw 🏅A fancy lucky-draw tool supporting multiple platforms💻(Mac/Linux/Windows/Web/Docker) 项目地址: https…...

操作符从浅入深的讲解
1. 操作符的分类 2. ⼆进制和进制转换 3. 原码、反码、补码 4. 移位操作符 5. 位操作符:&、|、^、~ 6. 单⽬操作符 7. 逗号表达式 8. 下标访问[]、函数调⽤() 9. 结构成员访问操作符 10. 操作符的属性:优先级、结合性 11. 表达式求值1.操作符的分类以…...

网安学习第24天 PHP安全——PHP反序列化
一、序列化与反序列化 1、序列化serialize() 序列化是什么?序列化就是把程序中的对象、数组、结构体等复杂数据,转换成可以存储或传输的格式。 简单说: 把“内存里的对象”变成“字符串/字节流”。 例如 PHP 中有一个对象: $u…...

解锁你的音乐收藏:浏览器端音频解密完整指南
解锁你的音乐收藏:浏览器端音频解密完整指南 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web 项目地址: https://gitcod…...

【国家级攻防演练级建议】:DeepSeek私有化部署中4类隐蔽后门植入路径与实时检测方案
更多请点击: https://kaifayun.com 第一章:DeepSeek私有化部署中隐蔽后门植入的攻防对抗本质 在私有化场景下,DeepSeek模型的部署链路常跨越镜像构建、权重加载、推理服务启动及API网关接入等多个环节。攻击者可利用构建上下文污染、依赖包劫…...

AI算法工程师必学的Python库:这10个库,AI开发必备
对于软件测试从业者来说,随着人工智能技术在测试领域的渗透越来越深——从自动化测试用例生成到缺陷智能预测,从测试结果分析到测试环境智能化调度,掌握AI开发的核心工具链已经成为从功能测试向AI测试开发、智能化测试转型的核心竞争力。Pyth…...

当卫星在天上“读懂”人间:ICLR 2025 论文深度解读师玉娇、昃向辉的CS2S
把一张卫星图变成一张街景照片,就像把一个俯视棋盘拼成一面看台——不仅要摆对每一枚棋子,还要看懂整场比赛想象这样一个场景:你在城市规划部门工作,需要快速生成某条街道在不同季节、不同天气条件下的真实渲染效果,以…...