【milkv】2、mpu6050驱动添加及测试
前言
本章介绍mpu6050的驱动添加以及测试。
其中驱动没有采用sdk提供的驱动,一方面需要配置irq,另一方面可以学习下如何通过ko方式添加驱动。
一、参考文章
驱动及测试文件编译流程:
https://community.milkv.io/t/risc-v-milk-v-lsm6dsr-i2c-module/284
代码来源:https://blog.csdn.net/m0_58844968/article/details/124994041
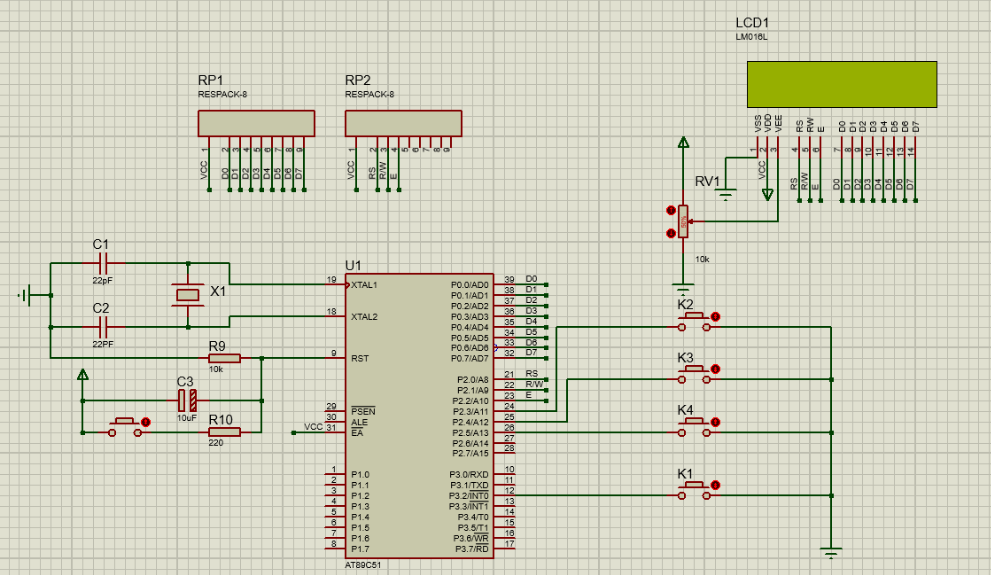
二、电路图
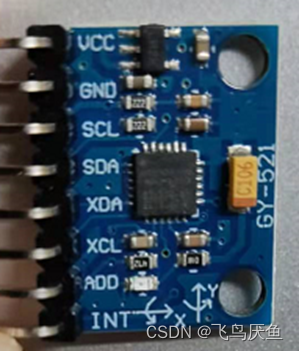
add接地,i2c地址为0x68
三、添加dts
duo-buildroot-sdk\build\boards\cv180x\cv1800b_milkv_duo_sd\dts_riscv\cv1800b_milkv_duo_sd.dts
mpu6050:mpu6050@68 {compatible = "invensense,mpu6050";reg = <0x68>;status = "okay";//interrupt-parent = <&gpio26>;//interrupts = <0 IRQ_TYPE_LEVEL_LOW>;
};
四、添加驱动
代码来源:https://blog.csdn.net/m0_58844968/article/details/124994041
注意驱动mpu6050.c中要和dts中的compatible一致
#ifndef MPU6050REG_H
#define MPU6050REG_Htypedef unsigned char uint8_t;/* register define */
#define MPU6050_SMPLRT_DIV 0x19 /*陀螺仪采样率,典型值:0x07(125Hz) */
#define MPU6050_CONFIG 0x1A /*低通滤波频率,典型值:0x06(5Hz)*/
#define MPU6050_GYRO_CONFIG 0x1B /*陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)*/
#define MPU6050_ACCEL_CONFIG 0x1C /*加速计自检、测量范围及高通滤波频率,典型值:0x01(不自检,2G,5Hz)*/
#define MPU6050_ACCEL_XOUT_H 0x3B /**/
#define MPU6050_ACCEL_XOUT_L 0x3C
#define MPU6050_ACCEL_YOUT_H 0x3D
#define MPU6050_ACCEL_YOUT_L 0x3E
#define MPU6050_ACCEL_ZOUT_H 0x3F
#define MPU6050_ACCEL_ZOUT_L 0x40
#define MPU6050_TEMP_OUT_H 0x41
#define MPU6050_TEMP_OUT_L 0x42
#define MPU6050_GYRO_XOUT_H 0x43
#define MPU6050_GYRO_XOUT_L 0x44
#define MPU6050_GYRO_YOUT_H 0x45
#define MPU6050_GYRO_YOUT_L 0x46
#define MPU6050_GYRO_ZOUT_H 0x47
#define MPU6050_GYRO_ZOUT_L 0x48
#define MPU6050_PWR_MGMT_1 0x6B /*电源管理,典型值:0x00(正常启用) */
#define MPU6050_WHO_AM_I 0x75 /* IIC地址寄存器(默认数值0x68,只读) */
#define MPU6050_SlaveAddress 0xD0 /*IIC写入时的地址字节数据,+1为读取*/
#define MPU6050_IIC_ADDR 0x68 /*MPU6050 IIC 器件地址*//* 中断状态寄存器*/
#define MPU6050_INT_STATUS 0x3A
#define MPU6050_INT_ENABLE 0x38
#define MPU6050_INT_PIN_CFG 0x37struct mpu6050_accel {short x;short y;short z;
};struct mpu6050_gyro {short x;short y;short z;
};struct mpu6050_data {struct mpu6050_accel accel;struct mpu6050_gyro gyro;
};#endif // __MPU6050REG_H
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>
#include <linux/timer.h>
#include <linux/of_irq.h>
#include <linux/irq.h>
// #include <asm/mach/map.h>
// #include <asm/uaccess.h>
// #include <asm/io.h>
// #include <linux/mach/map.h>
#include <linux/uaccess.h>
#include <linux/io.h>
#include <linux/i2c.h>
#include "mpu6050reg.h"#define mpu6050dev_CNT 1
#define mpu6050dev_NAME "mpu6050"
#define MPU6050_USE_INT 0 /* 不使用中断 */struct mpu6050_dev{ int major; /* 主设备号 */ int minor; /* 次设备号 */ struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */dev_t devid; /* 设备号 */struct i2c_client *client; void *private_data; /* 私有数据 */int16_t acceleration[3], gyro[3], temp; /* mpu6050数据 acceleration:加速度数据 gyro:陀螺仪数据 temp:温度指数据 */};static struct mpu6050_dev mpu6050dev;/** @description : 从mpu6050读取多个寄存器数据* [url=home.php?mod=space&uid=3142012]@param[/url] - dev: mpu6050设备* @param - reg: 要读取的寄存器首地址* @param - val: 读取到的数据* @param - len: 要读取的数据长度* [url=home.php?mod=space&uid=1141835]@Return[/url] : 操作结果*/
static int mpu6050_read_regs(struct mpu6050_dev *dev, u8 reg, void *val, int len)
{int ret;struct i2c_msg msg[2];struct i2c_client *client = (struct i2c_client *)dev->private_data;/* msg[0]为发送要读取的首地址 */msg[0].addr = client->addr; /* mpu6050地址 */msg[0].flags = 0; /* 标记为发送数据 */msg[0].buf = ® /* 读取的首地址 */msg[0].len = 1; /* reg长度*//* msg[1]读取数据 */msg[1].addr = client->addr; /* mpu6050地址 */msg[1].flags = I2C_M_RD; /* 标记为读取数据*/msg[1].buf = val; /* 读取数据缓冲区 */msg[1].len = len; /* 要读取的数据长度*/ret = i2c_transfer(client->adapter, msg, 2);if(ret == 2) {ret = 0;} else {printk("i2c read failed=%d reg=%06x len=%d\\n",ret, reg, len);ret = -EREMOTEIO;}return ret;
}/** @description : 向mpu6050多个寄存器写入数据* @param - dev: mpu6050设备* @param - reg: 要写入的寄存器首地址* @param - val: 要写入的数据缓冲区* @param - len: 要写入的数据长度* @return : 操作结果*/
static s32 mpu6050_write_regs(struct mpu6050_dev *dev, u8 reg, u8 *buf, u8 len)
{u8 b[256];struct i2c_msg msg;struct i2c_client *client = (struct i2c_client *)dev->private_data;b[0] = reg; /* 寄存器首地址 */memcpy(&b[1],buf,len); /* 将要写入的数据拷贝到数组b里面 */msg.addr = client->addr; /* mpu6050地址 */msg.flags = 0; /* 标记为写数据 */msg.buf = b; /* 要写入的数据缓冲区 */msg.len = len + 1; /* 要写入的数据长度 */return i2c_transfer(client->adapter, &msg, 1);
}/** @description : 读取mpu6050指定寄存器值,读取一个寄存器* @param - dev: mpu6050设备* @param - reg: 要读取的寄存器* @return : 读取到的寄存器值*/
static unsigned char mpu6050_read_reg(struct mpu6050_dev *dev, u8 reg)
{u8 data = 0;mpu6050_read_regs(dev, reg, &data, 1);return data;
}/** @description : 向mpu6050指定寄存器写入指定的值,写一个寄存器* @param - dev: mpu6050设备* @param - reg: 要写的寄存器* @param - data: 要写入的值* @return : 无*/
static void mpu6050_write_reg(struct mpu6050_dev *dev, u8 reg, u8 data)
{u8 buf = 0;buf = data;mpu6050_write_regs(dev, reg, &buf, 1);
}/*MPU6050 设备初始化 */
static void mpu6050_reset(void) {mpu6050_write_reg(&mpu6050dev,MPU6050_PWR_MGMT_1, 0x00); //解除休眠状态mpu6050_write_reg(&mpu6050dev,MPU6050_SMPLRT_DIV, 0x07);mpu6050_write_reg(&mpu6050dev,MPU6050_CONFIG, 0x06);mpu6050_write_reg(&mpu6050dev,MPU6050_GYRO_CONFIG, 0x18);mpu6050_write_reg(&mpu6050dev,MPU6050_ACCEL_CONFIG, 0x01);
}
/** @description : 读取mpu6050的数据,读取原始数据* @param - dev: mpu6050设备* @return : 无。*/
void mpu6050_readdata(struct mpu6050_dev *dev)
{unsigned char i =0;unsigned char buf[6];unsigned char val = 0x3B;/*从加速度寄存器(0x3B)开始读取6字节数据Start reading acceleration registers from register 0x3B for 6 bytes */mpu6050_read_regs(dev, val, buf, 6);for(i = 0; i < 3; i++) {dev->acceleration[i] = (buf[i * 2] << 8 | buf[(i * 2) + 1]);}/*从陀螺仪器数据寄存器(0x43)读取6字节数据The register is auto incrementing on each readNow gyro data from reg 0x43 for 6 bytesThe register is auto incrementing on each read*/val = 0x43;mpu6050_read_regs(dev, val, buf, 6);for(i = 0; i < 3; i++) {dev->gyro[i] = (buf[i * 2] << 8 | buf[(i * 2) + 1]);}/*从温度寄存器(0x41)读取2字节数据寄存器在每次读取时自动递增Now temperature from reg 0x41 for 2 bytesThe register is auto incrementing on each read*/val = 0x41;mpu6050_read_regs(dev, val, buf, 2);for(i = 0; i < 3; i++) {dev->temp = buf[0] << 8 | buf[1];}
}/** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int mpu6050_open(struct inode *inode,struct file *filp)
{filp->private_data = &mpu6050dev;printk("mpu6050-Drive_open\\r\\n");return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int mpu6050_release(struct inode *inode,struct file *filp)
{return 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t mpu6050_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{int16_t MPU6050_data[7];long err = 0;struct mpu6050_dev *dev = (struct mpu6050_dev *)filp->private_data;mpu6050_readdata(dev);MPU6050_data[0] = dev->acceleration[0];MPU6050_data[1] = dev->acceleration[1];MPU6050_data[2] = dev->acceleration[2];MPU6050_data[3] = dev->gyro[0];MPU6050_data[4] = dev->gyro[1];MPU6050_data[5] = dev->gyro[2];MPU6050_data[6] = dev->temp;err = copy_to_user(buf, MPU6050_data, sizeof(MPU6050_data));return 0;}/*字符操作集*/
static const struct file_operations mpu6050_fops = {.open = mpu6050_open,.release = mpu6050_release,.read = mpu6050_read,.owner = THIS_MODULE,
};/** @description : i2c驱动的remove函数,移除i2c驱动的时候此函数会执行* @param - client : i2c设备* @return : 0,成功;其他负值,失败*/
static int mpu6050_remove(struct i2c_client *client)
{/* 卸载字符设备驱动 */cdev_del(&mpu6050dev.cdev);unregister_chrdev_region(mpu6050dev.devid,mpu6050dev_CNT);device_destroy(mpu6050dev.class, mpu6050dev.devid);class_destroy(mpu6050dev.class);printk("mpu6050-Drive_EXIT!\\r\\n");return 0;
}/*当 I2C 设备和 I2C 驱动匹配成功以后 probe 函数就会执行*//** @description : i2c驱动的probe函数,当驱动与* 设备匹配以后此函数就会执行* @param - client : i2c设备* @param - id : i2c设备ID* @return : 0,成功;其他负值,失败*/
static int mpu6050_probe(struct i2c_client *client,const struct i2c_device_id *id)
{printk("mpu6050_probe\\r\\n");/*搭建字符设备框架*//* 1.注册字符设备驱动 */mpu6050dev.major = 0;if(mpu6050dev.major){mpu6050dev.devid = MKDEV(mpu6050dev.major,0);register_chrdev_region(mpu6050dev.devid,mpu6050dev_CNT,mpu6050dev_NAME);}else{ alloc_chrdev_region(&mpu6050dev.devid,0,mpu6050dev_CNT,mpu6050dev_NAME);mpu6050dev.major = MAJOR(mpu6050dev.devid);mpu6050dev.minor = MINOR(mpu6050dev.devid);}/* 2.初始化cdev */mpu6050dev.cdev.owner = THIS_MODULE;cdev_init(&mpu6050dev.cdev,&mpu6050_fops);/* 3.添加cdev */cdev_add(&mpu6050dev.cdev,mpu6050dev.devid,mpu6050dev_CNT);/* 4.创建类 */mpu6050dev.class = class_create(THIS_MODULE,mpu6050dev_NAME);if (IS_ERR(mpu6050dev.class)) {return PTR_ERR(mpu6050dev.class);}/* 5.创建设备 */mpu6050dev.device = device_create(mpu6050dev.class, NULL, mpu6050dev.devid, NULL,mpu6050dev_NAME);if (IS_ERR(mpu6050dev.device)) {return PTR_ERR(mpu6050dev.device);}mpu6050dev.private_data = client;mpu6050_reset();printk("mpu6050_reset\\n");return 0;
}
/* 传统的匹配表 无设备树的时候匹配 ID 表 */
static struct i2c_device_id mpu6050_id[] = {{"invensense,mpu6050",0},{}
};/*设备匹配表*/
static struct of_device_id mpu6050_of_match[] ={{ .compatible = "invensense,mpu6050" },{}
};/*i2c_driver*/
static struct i2c_driver mpu6050_driver = {.driver = {.name = "mpu6050",.owner = THIS_MODULE,.of_match_table = of_match_ptr(mpu6050_of_match),},.probe = mpu6050_probe,.remove = mpu6050_remove,.id_table = mpu6050_id,
};static int __init mpu6050dev_init(void){int ret = 0;ret = i2c_add_driver(&mpu6050_driver);return 0;}static void __exit mpu6050dev_exit(void){i2c_del_driver(&mpu6050_driver);
}module_init(mpu6050dev_init);
module_exit(mpu6050dev_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("XXXX");
五、编写makefile
SDK_DIR = /home/milkv/duo_buildroot_sdk/duo-buildroot-sdk
KERN_DIR = $(SDK_DIR)/linux_5.10/build/cv1800b_milkv_duo_sdall:make -C $(KERN_DIR) M=$(PWD) modules$(CROSS_COMPILE)gcc mpu6050-app.c -o mpu6050-app -Wall -pthread -O2clean:make -C $(KERN_DIR) M=$(PWD) modules cleanrm -rf modules.orderrm -rf mpu6050-appobj-m += mpu6050.o
六、编写测试文件
//https://blog.csdn.net/m0_58844968/article/details/124994041
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "sys/ioctl.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#include <poll.h>
#include <sys/select.h>
#include <sys/time.h>
#include <signal.h>
#include <fcntl.h>/** @description : main主程序* @param - argc : argv数组元素个数* @param - argv : 具体参数* @return : 0 成功;其他 失败*/
int main(int argc, char *argv[])
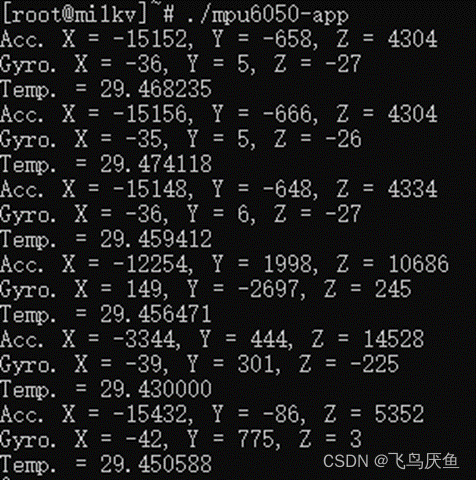
{int fd;char *filename;int16_t databuf[7];int16_t gyro_x_adc, gyro_y_adc, gyro_z_adc;int16_t accel_x_adc, accel_y_adc, accel_z_adc;int16_t temp_adc;int ret = 0;filename = "/dev/mpu6050";fd = open(filename, O_RDWR);if(fd < 0) {printf("can't open file %s\\r\\n", filename);return -1;}while (1) {ret = read(fd, databuf, sizeof(databuf));if(ret == 0) { /* 数据读取成功 */accel_x_adc = databuf[0];accel_y_adc = databuf[1];accel_z_adc = databuf[2];gyro_x_adc = databuf[3];gyro_y_adc = databuf[4];gyro_z_adc = databuf[5];temp_adc = databuf[6];printf("Acc. X = %d, Y = %d, Z = %d\\n", accel_x_adc, accel_y_adc, accel_z_adc);printf("Gyro. X = %d, Y = %d, Z = %d\\n", gyro_x_adc, gyro_y_adc, gyro_z_adc);// Temperature is simple so use the datasheet calculation to get deg C.// Note this is chip temperature.printf("Temp. = %f\\n", (temp_adc / 340.0) + 36.53);}usleep(1000000); /*1000ms */}close(fd); /* 关闭文件 */ return 0;
}
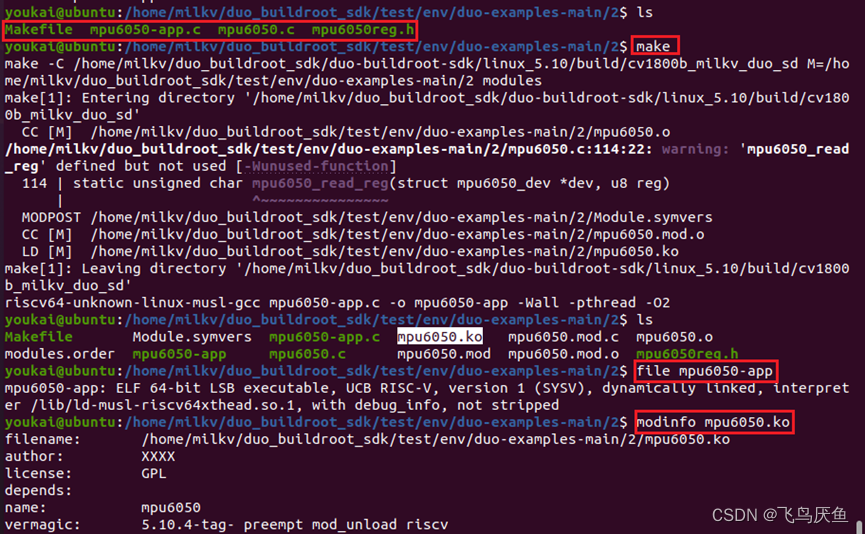
七、编译
make
file mpu6050-app
modinfo mpu6050.ko
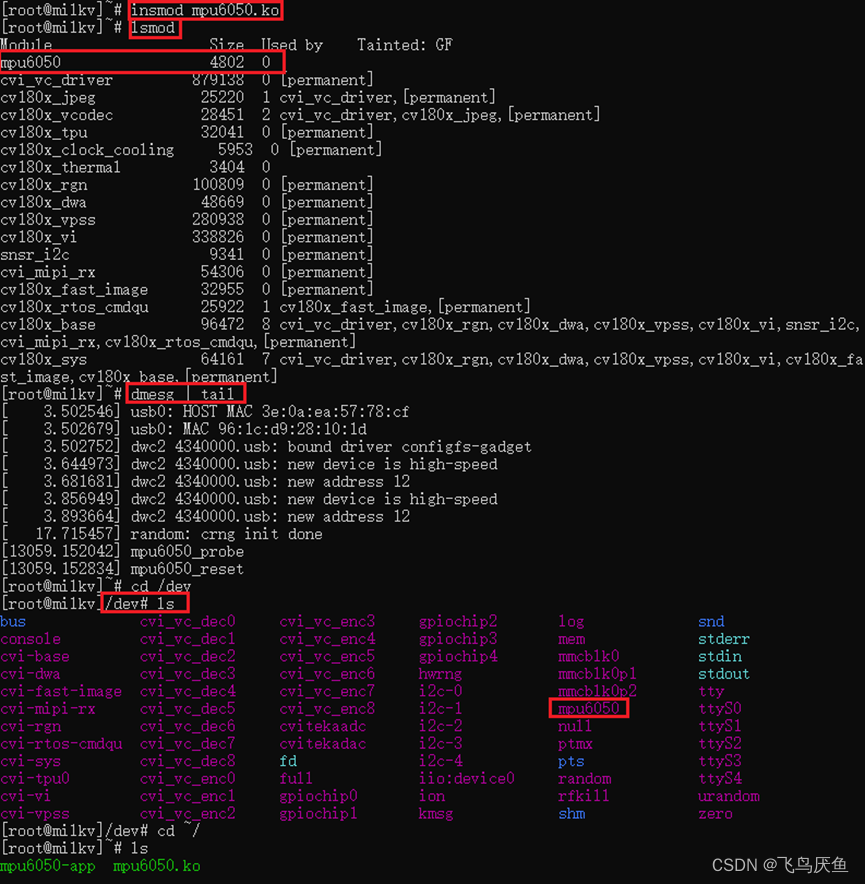
八、安装ko
insmod mpu6050.ko
lsmod
dmesg | tail
ls /dev
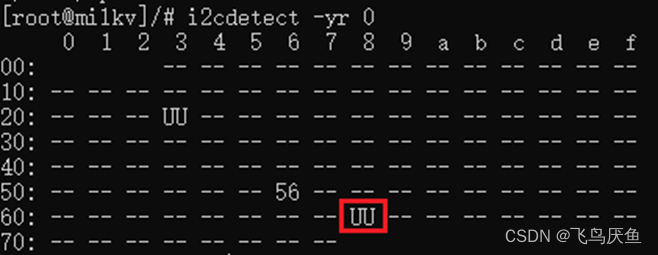
九、测试
相关文章:
【milkv】2、mpu6050驱动添加及测试
前言 本章介绍mpu6050的驱动添加以及测试。 其中驱动没有采用sdk提供的驱动,一方面需要配置irq,另一方面可以学习下如何通过ko方式添加驱动。 一、参考文章 驱动及测试文件编译流程: https://community.milkv.io/t/risc-v-milk-v-lsm6ds…...
SpringCloud Alibaba(中):服务熔断降级-Sentinel
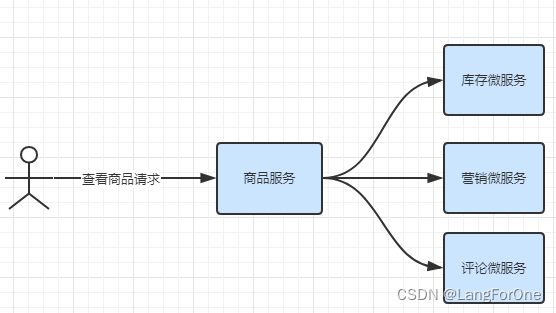
Sentinel Sentinel是阿里巴巴开源的分布式系统流量防卫防护组件,主要对分布式系统中的流量进行控制、熔断降级等保护操作。Sentinel的目标是成为互联网级别分布式系统的流量防卫防护组件,它与系统的各个部分集成,保护着系统的入口和出口。 …...

模型的训练专题
训练目标在数学上指定了模型应该如何从训练数据中学习和获取能力。训练基础模型的当前现状涉及特定于模型的目标。我们设想,未来基础模型的训练目标将反映两个变化:从系统证据和评估中得出的原则性选择,以及跨数据源和模式提供丰富、可扩展和…...

深入解析 Azure 机器学习平台:架构与组成部分
Azure机器学习平台是Microsoft Azure提供的一种云上机器学习服务,为开发者和数据科学家提供了一个全面且易于使用的环境来创建、训练、部署和管理机器学习模型。本文将对Azure机器学习平台的基本架构和组成部分进行深入解析,帮助读者全面了解该平台的工作…...

使用百度语音识别技术实现文字转语音的Java应用
探讨如何使用百度语音识别技术将文字转换为语音的Java应用。百度语音识别技术是一种强大的语音识别服务,可以将输入的文字转换为自然流畅的语音输出。我们将使用Java编程语言来实现这个应用,并提供相应的源代码。 首先,我们需要准备一些前提…...

【C#学习】文件操作
文章目录 常见操作拷贝文件检测文件夹是否存在并创建判断文件是否存在删除文件夹下的所有文件保留文件夹获取指定目录下的所有文件名删除 常见操作 拷贝文件 System.IO.File.Copy(sourcePath, targetPath); 检测文件夹是否存在并创建 //if directory not exit,then establis…...
Chrome版本对应Selenium版本
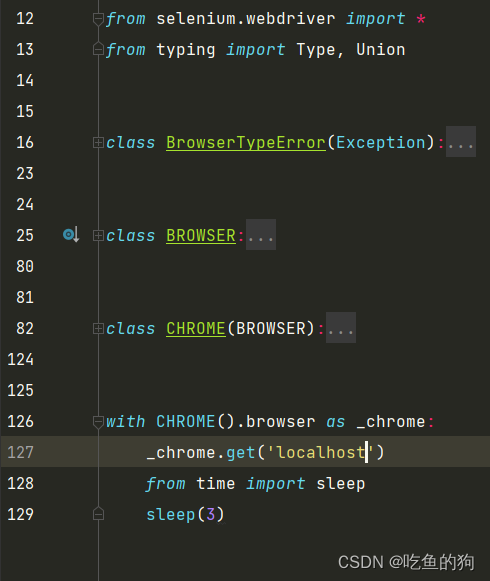
1.获得浏览器版本号和驱动 浏览器版本: 119.0.6045.124 浏览器驱动版本: 119.0.6043.1 / 120.0.6051.0 访问 https://vikyd.github.io/download-chromium-history-version/ 2. 安装selenium pip install selenium4.1.1 -i http://pypi.mirrors.ustc.edu.cn/simple/ --trusted…...
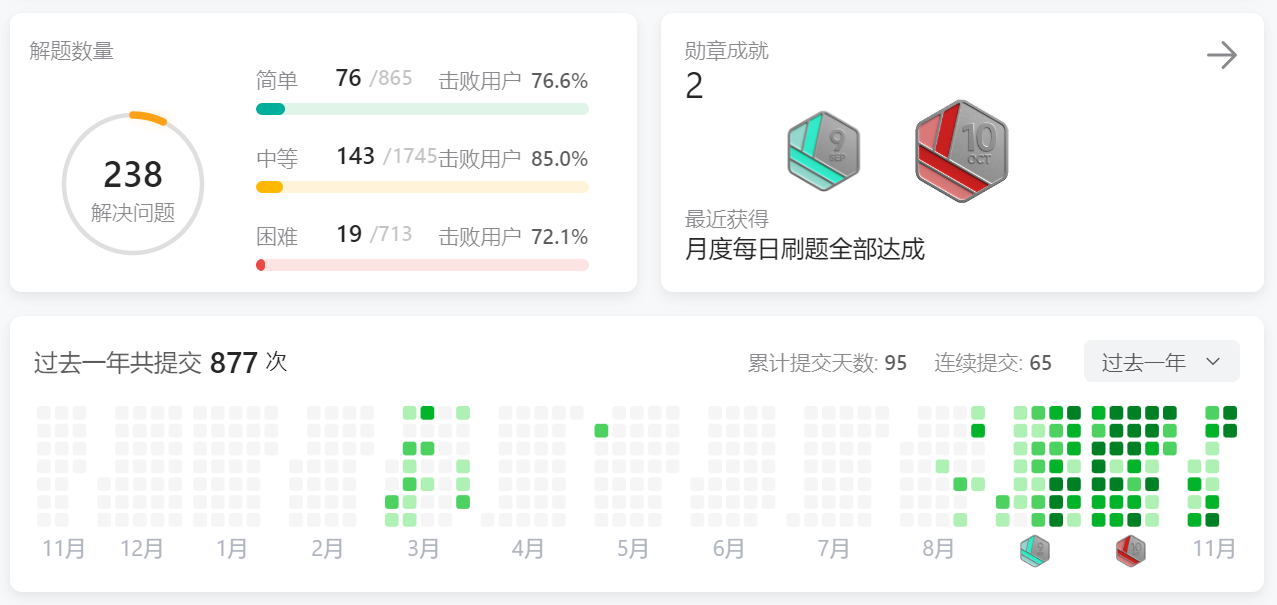
Day29力扣打卡
打卡记录 美丽塔 II(前后缀分解 单调栈) 链接 大佬的题解 class Solution:def maximumSumOfHeights(self, a: List[int]) -> int:n len(a)suf [0] * (n 1)st [n] # 哨兵s 0for i in range(n - 1, -1, -1):x a[i]while len(st) > 1 and …...

java源码用到的设计模式
Java 中有许多常用的设计模式,它们是为了解决特定问题而被反复使用和验证的经验总结。以下是一些常见的 Java 设计模式: 创建型模式 工厂模式 (Factory Pattern): 提供一个创建对象的接口,但是由子类决定实例化哪个类。例如:java…...

high perfermance computer usage
简单记一下hpc的使用: hpc就是一些科研机构或者大学建立的服务器中心。我这大学的每一位学生,可以轻松使用hpc批量跑数据,也可以新建自己的server跑一些local data,后者每个学生账号最大是32核512G的运行内存,体验非常…...
51单片机+DS1302设计一个电子钟(LCD1602显示时间)
一、前言 电子钟是一种能够准确显示时间的设备,广泛应用于家庭、办公场所和公共场所,为人们提供了方便和准确的时间信息。本项目设计一个基于51单片机的电子钟,使用DS1302作为RTC时钟芯片,LCD1602作为显示屏,并通过串…...

vue项目中在scss代码中使用data中的变量
尽管在日常开发中,这类情况实际上很少出现。 VUE2: 在HTML中使用时,请确保将cssVars绑定在需要使用CSS变量的元素或该元素的上层元素上。 <template><div :style"cssVars"><div class"test"/></div><…...

uni-app报错“本应用使用HBuilderX x.x.x 或对应的cli版本编译,而手机端SDK版本是x.x.x不匹配的版本可能造成应用异常”
uniapp开发的一个跨平台软件,在安卓模拟器上启动的时候报警告: 官方给的解释:uni-app运行环境版本和编译器版本不一致的问题 - DCloud问答 解决办法有两个 方法一:添加忽略警告的配置 项目根目录下找到 manifest.json…...

[sd_scripts]之train
https://github.com/kohya-ss/sd-scripts/blob/main/docs/train_README-zh.mdhttps://github.com/kohya-ss/sd-scripts/blob/main/docs/train_README-zh.md 支持模型fine-tune,dreambooth,lora,textual inversion。 1.数据准备 在任意多个…...

samba 共享目录write permission deny问题修复 可读取内容但不可修改 删除 新增文件
关于 update/delete/write permission deny问题修复 0.首先在服务器端执行testparm -s ,测试 Samba 配置并显示结果。需确保服务器端参数 read only No ,共享目录有写入权限 一、若配置了允许匿名访问,使用匿名访问来操作smb需要做如下处理…...

UDP主要丢包原因及具体问题分析
一、主要丢包原因 1、接收端处理时间过长导致丢包:调用recv方法接收端收到数据后,处理数据花了一些时间,处理完后再次调用recv方法,在这二次调用间隔里,发过来的包可能丢失。对于这种情况可以修改接收端,将包接收后存入…...
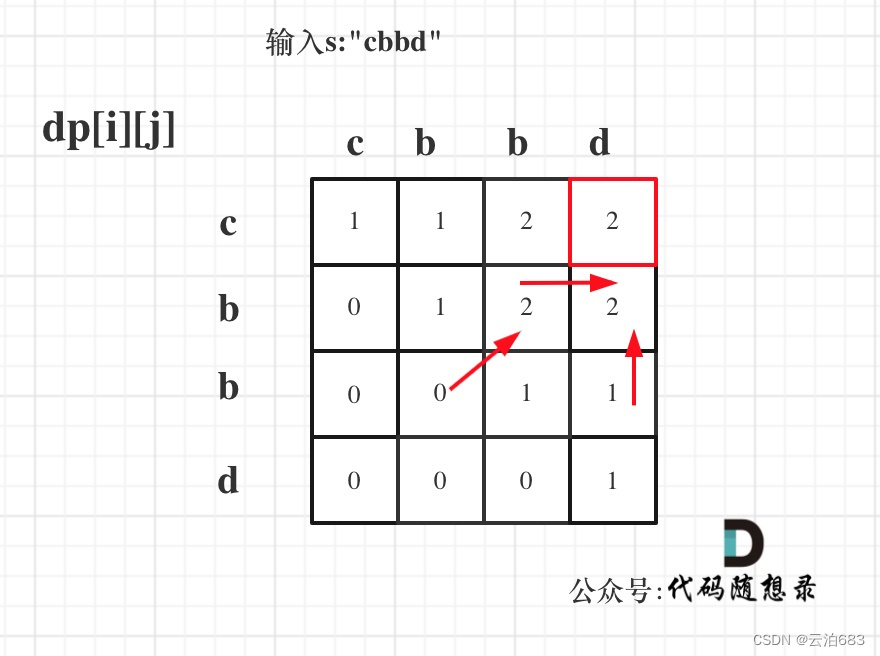
647. 回文子串 516.最长回文子序列
647. 回文子串 题目: 给你一个字符串 s ,请你统计并返回这个字符串中 回文子串 的数目。 回文字符串 是正着读和倒过来读一样的字符串。 子字符串 是字符串中的由连续字符组成的一个序列。 具有不同开始位置或结束位置的子串,即使是由相…...

点云从入门到精通技术详解100篇-双传感器模式的非结构化环境检测与识别
目录 前言 国内外研究现状 可通行区域检测的研究 障碍物检测的研究...

Nginx-反向代理
反向代理 1 语法 server {listen 82; server_name www.liyong.f.com;location ~* .*(css|js|html|images). {proxy_pass http://11.22.19.81:8088; } 上面的示例的意思是: 当访问:http://www.liyong.f.com:82/static/css/OneMap.b728e2e4.css 转发到 …...
Java封装一个根据指定的字段来获取子集的工具类
工具类 ZhLambdaUtils SuppressWarnings("all") public class ZhLambdaUtils {/*** METHOD_NAME*/private static final String METHOD_NAME "writeReplace";/*** 获取到lambda参数的方法名称** param <T> parameter* param function functi…...

基于Arduino的智能蓝调节拍器:DIY音乐练习伴侣
1. 项目概述:一个能“演奏”蓝调的低成本节拍器玩乐器的人,对节拍器这东西又爱又恨。它像一位严厉的监工,用单调的“嘀嗒”声强迫你跟上节奏。但你想过没有,这个监工其实可以很有趣?几年前,我在练习蓝调吉他…...

收藏干货|2026 版企业 AI 落地实操指南,程序员小白入门避坑必备
如今人工智能早已脱离概念炒作阶段,全面扎根企业实际业务场景,成为技术从业者与企业管理者无法回避的发展课题。各行各业都加速布局AI赛道,行业心态也从初期观望试探,彻底转变为实打实的落地攻坚。 不少企业高层主动牵头统筹AI规划…...

深度解析HS2-HF Patch:从技术框架到创作工具链的完整升级方案
深度解析HS2-HF Patch:从技术框架到创作工具链的完整升级方案 【免费下载链接】HS2-HF_Patch Automatically translate, uncensor and update HoneySelect2! 项目地址: https://gitcode.com/gh_mirrors/hs/HS2-HF_Patch 你是否曾因Honey Select 2的原版体验受…...

从NLP到RAG:AI标书生成系统的技术架构与落地路径深度剖析
引言2026年2月,国家发改委等八部门联合印发《关于加快招标投标领域人工智能推广应用的实施意见》,明确到2026年底招标文件检测、智能辅助评标、围串标识别等重点场景在部分省市实现全覆盖。同一时期,《招标投标法》修订草案经国务院常务会议原…...

零基础怎么学Agent?这个工程师考试内容拆给你看
站在 AI Agent(智能体)爆发的十字路口,很多既没有深厚算法背景、也没有丰富写代码经验的“小白”常常感到迷茫:动辄谈及的大模型交互、复杂的业务编排,零基础真的能学会吗? 事实上,智能体开发早…...

音乐解锁工具:让加密音乐文件在任何设备自由播放
音乐解锁工具:让加密音乐文件在任何设备自由播放 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web 项目地址: https://gi…...

3步搞定B站缓存视频转换:m4s转MP4的终极解决方案
3步搞定B站缓存视频转换:m4s转MP4的终极解决方案 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 你是否曾经在B站缓存了珍贵的视频&a…...
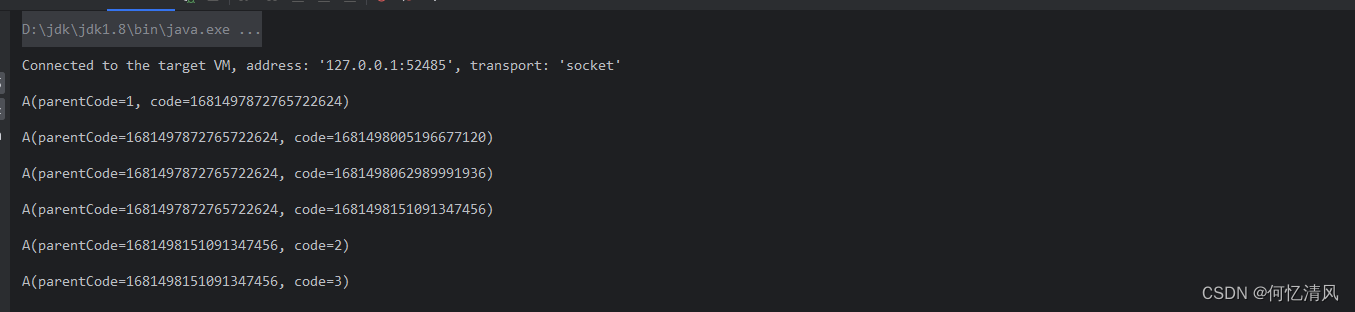
)
内存申请和使用的场景分析(以AP->kernal->ISP为例)
在 ISP(Image Signal Processor)系统中,AP 与 ISP 之间的内存交互本质上是一个**“AP 申请可 DMA 访问的共享内存 → 内核建立映射 → 硬件寻址读写 → 同步与回收”**的过程。下面按数据流分层详细拆解。一、ISP 内存需求的特殊性 与普通应用…...

“--glow”并不存在?!深度逆向Midjourney 6.1源码级辉光模拟协议,曝光官方刻意隐藏的4个隐式辉光增强开关
更多请点击: https://kaifayun.com 第一章:辉光效果的视觉本质与Midjourney 6.1协议悖论 辉光(Glow)并非物理光源的直接投射,而是人眼视网膜对高对比度边缘与饱和色域交界处产生的神经光学响应——一种由局部亮度梯度…...

PDF差异对比神器diff-pdf:告别文档核对烦恼,提升工作效率的智能解决方案
PDF差异对比神器diff-pdf:告别文档核对烦恼,提升工作效率的智能解决方案 【免费下载链接】diff-pdf A simple tool for visually comparing two PDF files 项目地址: https://gitcode.com/gh_mirrors/di/diff-pdf 你是否曾在核对PDF文档时感到头疼…...