北邮22级信通院数电:Verilog-FPGA(9)第九周实验(4)实现寄存器74LS374
北邮22信通一枚~
跟随课程进度更新北邮信通院数字系统设计的笔记、代码和文章
持续关注作者 迎接数电实验学习~
获取更多文章,请访问专栏:
北邮22级信通院数电实验_青山如墨雨如画的博客-CSDN博客

目录
一.代码部分
1.1 reg_74LS374.v
1.2 reg_LS374_tb.v
二.仿真测试效果
一.代码部分
1.1 reg_74LS374.v
module reg_74LS374
(input [7:0] D_in,input clk,output reg [7:0] D_out
);
always @ (posedge clk)begin D_out <=D_in; end
endmodule1.2 reg_LS374_tb.v
`timescale 1ns/1ps
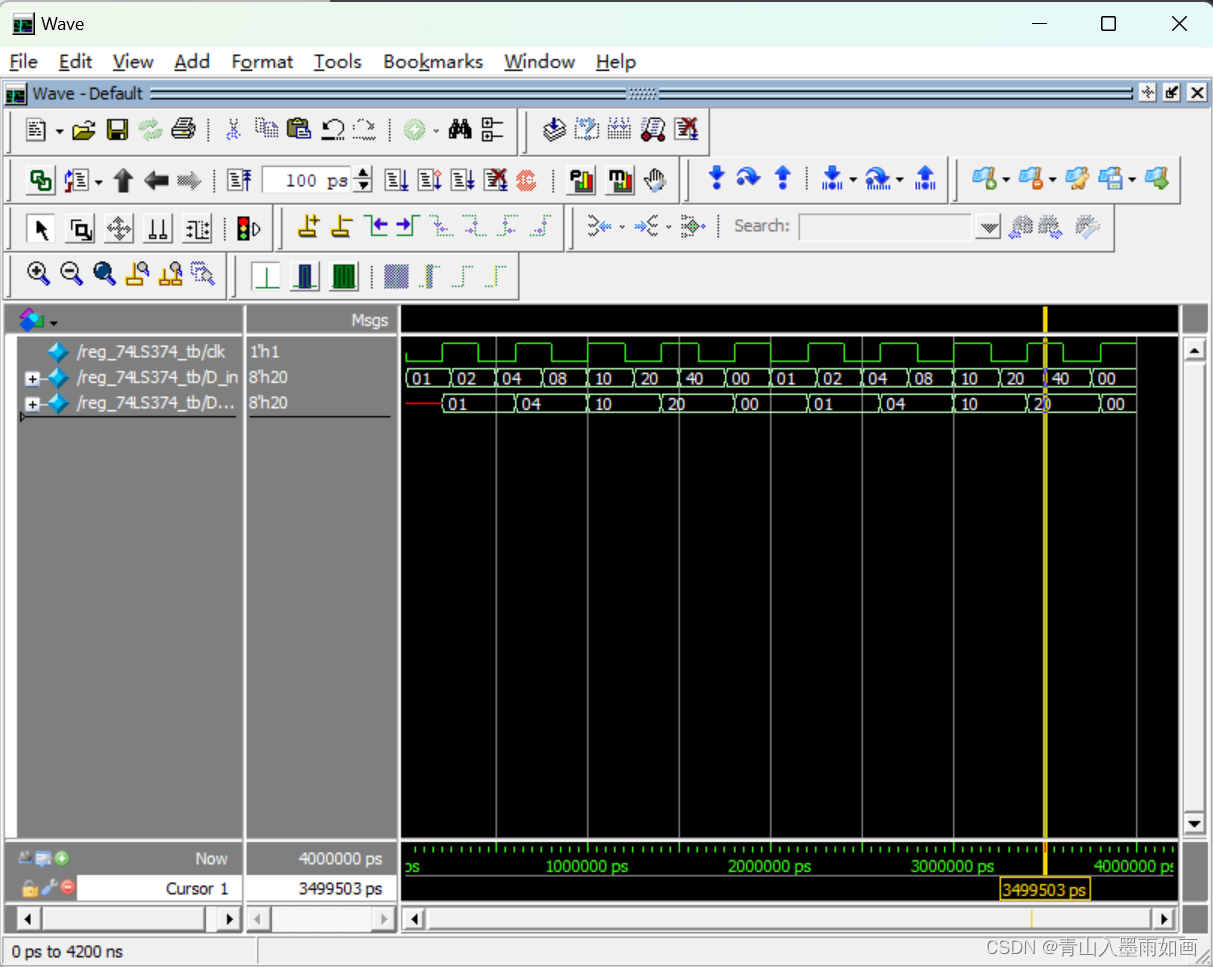
module reg_74LS374_tb();reg clk;reg [7:0] D_in;wire [7:0] D_out;initial begin repeat(20) begin clk=1'b0;#200;clk=1'b1;#200;end$stop;endinitial begin repeat(2) begin D_in=8'b0000_0001;#250;D_in=8'b0000_0010;#250;D_in=8'b0000_0100;#250;D_in=8'b0000_1000;#250;D_in=8'b0001_0000;#250;D_in=8'b0010_0000;#250;D_in=8'b0100_0000;#250;D_in=8'b10000_0000;#250;end$stop;endreg_74LS374 reg_1(.clk(clk),.D_in(D_in),.D_out(D_out)); endmodule
二.仿真测试效果
相关文章:
北邮22级信通院数电:Verilog-FPGA(9)第九周实验(4)实现寄存器74LS374
北邮22信通一枚~ 跟随课程进度更新北邮信通院数字系统设计的笔记、代码和文章 持续关注作者 迎接数电实验学习~ 获取更多文章,请访问专栏: 北邮22级信通院数电实验_青山如墨雨如画的博客-CSDN博客 目录 一.代码部分 1.1 reg_74LS374.v 1.2 reg_LS3…...

【Android】带下划线的TextView
序言 我们有时候需要一个类似这样的显示,上面是文字,下面是一条线 这样的显示效果是TextView实现不了的,需要我们自己进行修改一下。 实现 创建一个UnderlineTextView,继承系统的TextView class UnderlineTextView(mContext…...

图解未来:数据可视化引领智慧决策时代
图表和数据可视化在数据分析中的关键作用 引言: 在现代数据科学中,数据可视化扮演着至关重要的角色。通过图表和可视化工具,我们能够更直观、更有效地理解数据的分布、趋势和关联性。本文将深入讨论三个主要的数据可视化工具:mat…...
例解什么是Python装饰器
Python中的装饰器一直是一个比较难理解的概念,我自己理解的就是用一个函数去修改另一个函数,主要是为另一个函数添加计时等功能,而且不用改变另一个函数,这样就大大减少了另一个函数的维护成本。 这个装饰器,英文名就…...
EtherCAT从站EEPROM组成信息详解(3):字16-63邮箱、EEPROM信息
0 工具准备 1.EtherCAT从站EEPROM数据(本文使用DE3E-556步进电机驱动器)1 字10-63邮箱、EEPROM信息 1.1 字10-63组成规范 字10-63虽然包含的空间区域很大,但实际上仅包含引导状态下邮箱配置、标准邮箱配置、EEPROM大小、执行的SII标准版本…...
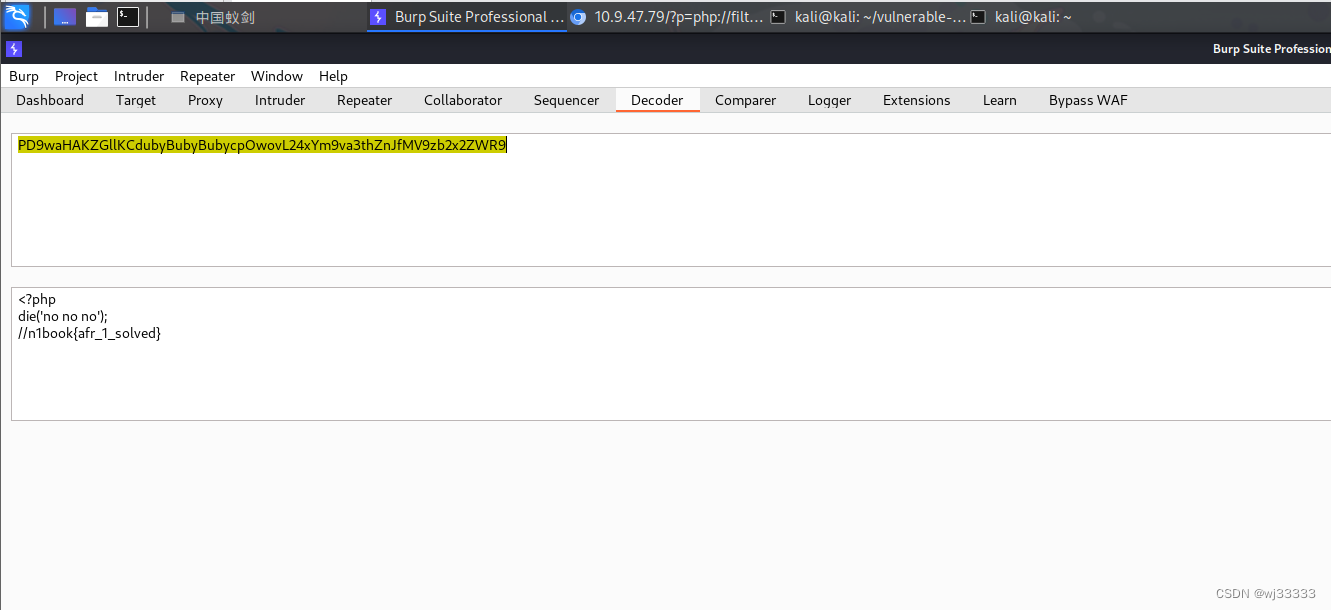
【文件读取/包含】任意文件读取漏洞 afr_1
1.1漏洞描述 漏洞名称任意文件读取漏洞 afr_1漏洞类型文件读取漏洞等级⭐漏洞环境docker攻击方式 1.2漏洞等级 高危 1.3影响版本 暂无 1.4漏洞复现 1.4.1.基础环境 靶场docker工具BurpSuite 1.4.2.靶场搭建 1.创建docker-compose.yml文件 version: 3.2 services: web: …...

(八)五种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划MATLAB
一、五种算法(DBO、LO、SWO、COA、GRO)简介 1、蜣螂优化算法DBO 蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁殖行为…...

通义灵码,阿里巴巴的编程辅助工具
一、官网 通义灵码_智能编码助手_AI编程_人工智能-阿里云 二、安装VSCode 如何下载安装VSCode 三、VSCode安装通义灵码 1.访问扩展详情界面 方式1 访问通义灵码安装教程页面 方法2 访问VSCode市场中的TONGYI Lingma 点击 Install 按钮访问扩展详情界面 2.打开VSCode …...

Uniapp导出的iOS应用上架详解
目录 Uniapp导出的iOS应用上架详解 摘要 引言 苹果审核标准 苹果调试 注意事项和建议 总结 摘要 本文将探讨Uniapp导出的iOS应用能否成功上架的问题。我们将从苹果审核标准、性能影响、调试流程等多个方面进行深入分析,以及向开发者提供相关注意事项和建议。…...

计算机视觉基础(7)——相机基础
前言 从这一节开始,我们来学习几何视觉。中层视觉包括相机模型、单目几何视觉、对极几何视觉和多目立体视觉等。在学习几何视觉最开始,我们先来学习一下相机模型,了解相机的基本原理,了解相机如何记录影像。 一、数字相机 1.1 基…...

解决Github上的README无法显示图片
首先感谢博主的思路:思路 最近写了点东西提交到git 发现本地能查看md里的图片用的相对路径,提交到github就看不见,并且发现不只是我自己的仓库看不见,其他人的我也看不见。那就有问题了 解决:正常使用相对路径&…...
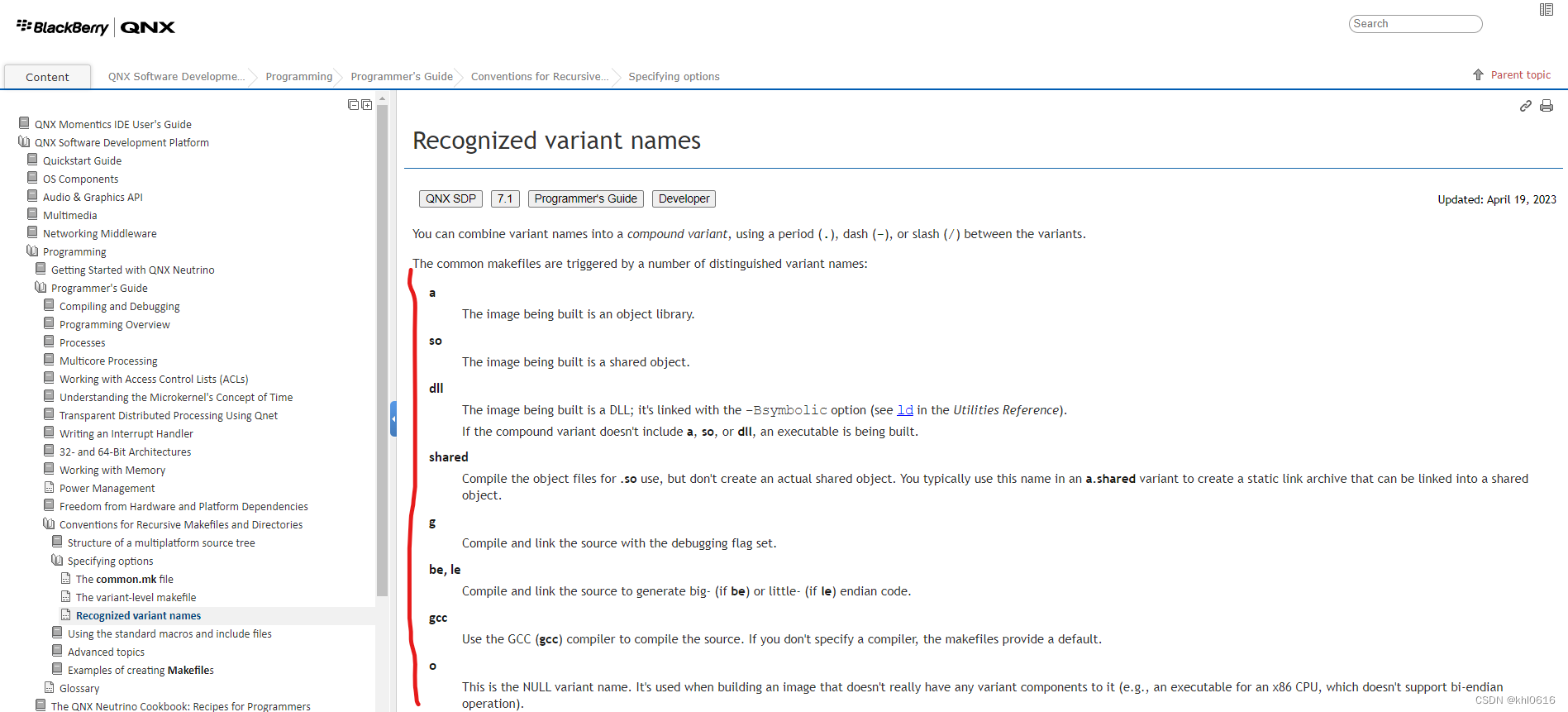
qnx 工程目录创建工具 addvariant
文章目录 前言一、addvariant 是什么二、addvariant 使用实例1. variant names 参数说明2. 创建一个可执行文件工程3. 创建一个动态库工程 总结参考资料 前言 本文主要介绍如何在qnx 开发环境中创建工程目录及其相关的配置文件(common.mk, Makefile 文件等) 软件版本ÿ…...
计算机视觉+深度学习+机器学习+opencv+目标检测跟踪+一站式学习(代码+视频+PPT)
第1章:视觉项目资料介绍与学习指南 相关知识: 介绍计算机视觉、OpenCV库,以及课程的整体结构。学习概要: 了解课程的目标和学习路径,为后续章节做好准备。重要性: 提供学生对整个课程的整体认识࿰…...
【AI视野·今日CV 计算机视觉论文速览 第278期】Mon, 30 Oct 2023
AI视野今日CS.CV 计算机视觉论文速览 Mon, 30 Oct 2023 Totally 50 papers 👉上期速览✈更多精彩请移步主页 Daily Computer Vision Papers Image Clustering Conditioned on Text Criteria Authors Sehyun Kwon, Jaeseung Park, Minkyu Kim, Jaewoong Cho, Ernest…...

深度学习:多模态与跨模态
1 定义 1.1 多模态学习 多模态学习(Multimodal Learning)是一种利用来自多种不同感官或交互方式的数据进行学习的方法。在这个语境中,“模态”指的是不同类型的数据输入,如文本、图像、声音、视频等。多模态学习的关键在于整合和…...

大数据Hadoop之——部署hadoop+hive+Mysql环境(Linux)
目录 一、JDK的安装 1、安装jdk 2、配置Java环境变量 3、加载环境变量 4、进行校验 二、hadoop的集群搭建 1、hadoop的下载安装 2、配置文件设置 2.1. 配置 hadoop-env.sh 2.2. 配置 core-site.xml 2.3. 配置hdfs-site.xml 2.4. 配置 yarn-site.xml 2.5. 配置 ma…...
在地图文档中加入图层)
Python与ArcGIS系列(四)在地图文档中加入图层
目录 0 简述1 将图层添加到地图文档中2 将图层插入到地图文档0 简述 本篇介绍如何利用arcpy实现将图层添加到地图文档中,以及将图层插入到地图文档指定的位置。 1 将图层添加到地图文档中 arcpy的mapping模块提供的AddLayer()函数可以实现将图层添加到地图文档中。功能本质上…...

QT 程序异常崩溃
出现以下问题,大概率是你在修改代码时,在pro或者pri中增加了一些不存在的头文件或者cpp,使用BeyondCmp仔细对比,分享,希望帮助到你...

Ubuntu20.04 通过nmcli命令查看网卡状态为unmanaged
问题描述: 通过下述指令查看网卡状态为 "unmanaged" nmcli dev status 解决方法: cd /usr/lib/NetworkManager/conf.d/ sudo mv 10-globally-managed-devices.conf 10-globally-managed-devices.conf.bak sudo cp 10-globally-managed-devic…...

【R Error系列】r - fatal error : RcppEigen. h:没有这样的文件或目录
在头文件那要有 // [[Rcpp::depends(RcppEigen)]] 即: #include <Rcpp.h> #include <RcppEigen.h> using namespace Rcpp; using namespace Eigen;// [[Rcpp::depends(RcppEigen)]] // [[Rcpp::export]] 参考: r - fatal error: RcppEi…...

Codex vs. Claude Code:我的发现
“你试过 Codex 搭配 GPT-5.5 了吗?我刚用 40 分钟重建了整个认证模块。上周用 Claude 做同样的事花了三个小时。” 我回复了一句"有意思",然后继续做手头的事。我使用 Claude Code 已近一年,已经围绕它建立了整套工作流——CLAUD…...

解密AliceSoft游戏文件处理:3种高效提取与编辑方法深度解析
解密AliceSoft游戏文件处理:3种高效提取与编辑方法深度解析 【免费下载链接】alice-tools Tools for extracting/editing files from AliceSoft games. 项目地址: https://gitcode.com/gh_mirrors/al/alice-tools alice-tools是一款专为AliceSoft游戏设计的开…...

为什么你的DeepSeek总把“苹果”误判为涉政词汇?揭秘中文语义歧义消解的7步标准化清洗流程
更多请点击: https://codechina.net 第一章:DeepSeek敏感信息过滤的底层逻辑困境 DeepSeek系列模型在部署面向公众的API服务时,普遍引入了基于规则与轻量级分类器协同的敏感信息过滤层。该层并非嵌入于主推理路径中,而是作为独立…...

JMeter接口测试进阶:从功能验证到生产级性能工程
1. 这不是“点点点就能跑通”的接口测试,而是你真正能扛住压测的底气很多人第一次打开 JMeter,以为它只是个“图形化 Postman”——填 URL、选方法、点执行,看到绿色 Success 就觉得“接口测完了”。我带过三届测试团队,几乎每届都…...

如何用开源工具GoldenCheetah将训练数据转化为科学优势
如何用开源工具GoldenCheetah将训练数据转化为科学优势 【免费下载链接】GoldenCheetah Performance Software for Cyclists, Runners, Triathletes and Coaches 项目地址: https://gitcode.com/gh_mirrors/go/GoldenCheetah GoldenCheetah是一款专为自行车、跑步和铁人…...

微信小程序数据可视化:5步实现ECharts专业级图表集成方案
微信小程序数据可视化:5步实现ECharts专业级图表集成方案 【免费下载链接】echarts-for-weixin 基于 Apache ECharts 的微信小程序图表库 项目地址: https://gitcode.com/gh_mirrors/ec/echarts-for-weixin 面对微信小程序中复杂数据可视化需求的挑战&#x…...

终极指南:如何用novel-downloader轻松保存网络小说到本地
终极指南:如何用novel-downloader轻松保存网络小说到本地 【免费下载链接】novel-downloader 一个可扩展的通用型小说下载器。 项目地址: https://gitcode.com/gh_mirrors/no/novel-downloader 你是否曾经遇到过心爱的小说突然从网站上消失的窘境?…...

Cursor Free VIP破解工具终极指南:5分钟实现AI编程助手永久免费使用
Cursor Free VIP破解工具终极指南:5分钟实现AI编程助手永久免费使用 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve rea…...

3分钟掌握QMC音频解密:qmc-decoder实战指南与算法深度解析
3分钟掌握QMC音频解密:qmc-decoder实战指南与算法深度解析 【免费下载链接】qmc-decoder Fastest & best convert qmc 2 mp3 | flac tools 项目地址: https://gitcode.com/gh_mirrors/qm/qmc-decoder 在数字音乐时代,你是否曾因QQ音乐加密格式…...

JMeter梯度压测:精准定位系统可扩展性边界
1. 为什么“梯度式压测”不是加个线程组就完事了?很多人第一次打开JMeter,照着教程建个线程组、加个HTTP请求、跑个聚合报告,看到TPS从200涨到800就以为“压测完成了”。结果上线后流量一上来,服务直接503,监控里CPU没…...