二叉树(进阶)
文章目录
- 1.内容安排说明
- 2. 二叉搜索树
- 2.1二叉搜索树的概念
- 2.2二叉搜索树的实现
- 2.3二叉树的性能:
- 搜索二叉树的应用
- k 模型
- kv模型
1.内容安排说明
二叉树在前面c数据结构阶段;已经讲过了;本节取名二叉树进阶的原因是:
1.map和set特性需要先铺垫二叉搜索树 ,而二叉搜索树也是一种树形结构;
2. 二叉搜索树的特性了解,有助于更好的理解map和set的特性
3. 二叉树中部分面试题稍微有点难度,在前面讲解大家不容易接受,且时间长容易忘
4. 有些OJ题使用C语言方式实现比较麻烦,比如有些地方要返回动态开辟的二维数组,非常麻烦。
因此本节借二叉树搜索树,对二叉树部分进行收尾总结。
2. 二叉搜索树
2.1二叉搜索树的概念
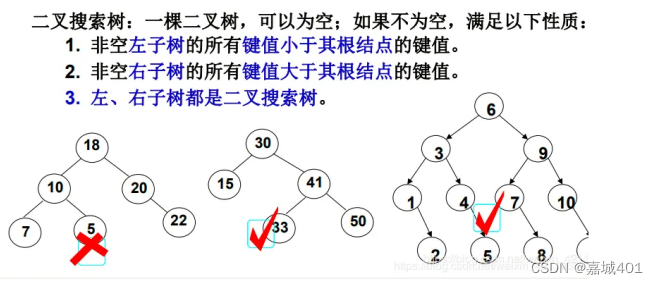
二叉搜索树又称二叉排序树,它或者是一棵空树,或者是具有以下性质的二叉树:
1.若它的左子树不为空,则左子树上所有节点的值都小于根节点的值;
2.若它的右子树不为空,则右子树上所有节点的值都大于根节点的值;
3.它的左右子树也分别为二叉搜索树
2.2二叉搜索树的实现
#pragma once
#include <iostream>
using namespace std;
template <class K>
struct BSTreeNode
{BSTreeNode<K>* _left;BSTreeNode<K>* _right;K _key;BSTreeNode(const K& key):_left(nullptr), _right(nullptr), _key(key){}};
template <class K>
class BSTree
{typedef BSTreeNode<K> Node;
public:void Swap(Node* a, Node* b){Node s = *a;*a = *b;*b = s;}//出先两个函数的原因是:这里使用了递归;递归需要使用递归类控制循环次数;所以使用类get函数进行调用;bool Find(const K& key){return _Find(_root, key);}void InOrder(){_InOrder(_root);cout << endl;}bool Insert(const K& key){return _Insert(_root, key);}bool Erase(const K& key){return _Erase(_root, key);}~BSTree(){Destroy(_root);}BSTree(){}BSTree(const BSTree<K>& t ){_root = Copy(t._root);}BSTree<K>& operator = (const BSTree<K> t){swap(_root,t._root);return *this;}private:Node* Copy(Node* root){if (root == nullptr){return nullptr;}Node* newRoot = new Node(root->_key);newRoot->_left = Copy(root->_left);newRoot->_right = Copy(root->_right);return newRoot;}void _InOrder(Node* root){if (root == nullptr){return;}_InOrder(root->_left);cout << root->_key << " ";_InOrder(root->_right);}bool _Find(Node* root, const K& key){if (root == nullptr){return false;}else{if (key > root->_key){_Find(root->_right, key);}else if (key < root->_key){_Find(root->_left, key);}else{return true;}}}bool _Insert(Node*& root, const K& key){if (root == nullptr){root = new Node(key);return true;}if (key > root->_key){_Insert(root->_right, key);}else if (key < root->_key){_Insert(root->_left, key);}else{return false;}}bool _Erase(Node*& root, const K& key){if (root == nullptr){return false;}else{if (key > root->_key){return _Erase(root->_right, key);}else if (key < root->_key){return _Erase(root->_left, key);}else{if (root->_right == nullptr){Node* n = root;root = root->_left;delete n;return true;}else if (root->_left == nullptr){Node* n = root;root = root->_right;delete n;return true;}else{Node* cur = root->_left;while (cur->_right){cur = cur->_right;}swap(cur->_key, root->_key);return _Erase(_root->_right, key);}}}}void Destroy(Node*& root){if (root == nullptr){return;}Destroy(root->_left);Destroy(root->_right);delete root;root = nullptr;}private:Node* _root = nullptr;
};
2.3二叉树的性能:
二叉树的时间复杂度:这里的是时间复杂度测量的是查找的时间复杂度;原因:删除和添加都修要使用查找哦来进行;
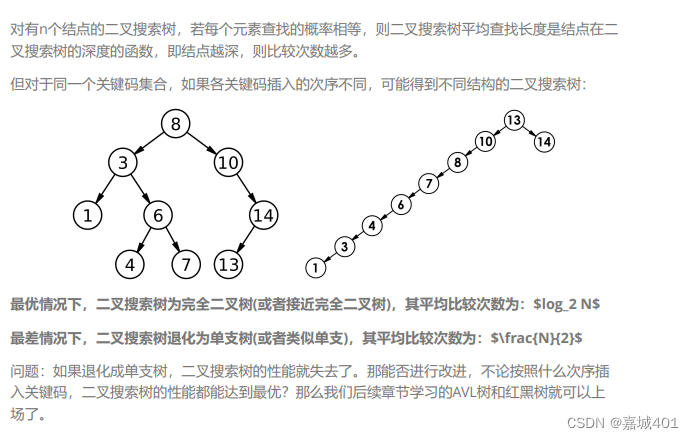
最优情况下,二叉搜索树为完全二叉树(或者接近完全二叉树),其平均比较次数为: l o g 2 N log_2 N log2N
最差情况下,二叉搜索树退化为单支树(或者类似单支),其平均比较次数为: N 2 \frac{N}{2} 2N
搜索二叉树的应用
k 模型
定义:K模型即只有key作为关键码,结构中只需要存储Key即可,关键码即为需要搜索到
的值。
例子
比如:给一个单词word,判断该单词是否拼写正确,具体方式如下:
- 以词库中所有单词集合中的每个单词作为key,构建一棵二叉搜索树
- 在二叉搜索树中检索该单词是否存在,存在则拼写正确,不存在则拼写错误。
kv模型
定义:每一个关键码key,都有与之对应的值Value,即<Key, Value>的键值对。该种方式在现实生活中非常常见:
- 比如:英汉词典就是英文与中文的对应关系,通过英文可以快速找到与其对应的中文,英文单词与其对应的中文<word, chinese>就构成一种键值对;
- 再比如统计单词次数,统计成功后,给定单词就可快速找到其出现的次数,单词与其出现次数就是<word, count>就构成一种键值对。
// 改造二叉搜索树为KV结构
template<class K, class V>
struct BSTNode{BSTNode(const K& key = K(), const V& value = V()): _pLeft(nullptr) , _pRight(nullptr), _key(key), _Value(value){}BSTNode<T>* _pLeft;BSTNode<T>* _pRight;K _key;V _value};
template<class K, class V>
class BSTree{typedef BSTNode<K, V> Node;typedef Node* PNode;
public:BSTree(): _pRoot(nullptr){}PNode Find(const K& key);bool Insert(const K& key, const V& value)bool Erase(const K& key)
private:PNode _pRoot;
比特就业课
2.5 二叉搜索树的性能分析
插入和删除操作都必须先查找,查找效率代表了二叉搜索树中各个操作的性能。};
void TestBSTree3()
{// 输入单词,查找单词对应的中文翻译BSTree<string, string> dict;dict.Insert("string", "字符串");dict.Insert("tree", "树");dict.Insert("left", "左边、剩余");dict.Insert("right", "右边");dict.Insert("sort", "排序");// 插入词库中所有单词string str;while (cin>>str){BSTreeNode<string, string>* ret = dict.Find(str);if (ret == nullptr){cout << "单词拼写错误,词库中没有这个单词:" <<str <<endl;}else{cout << str << "中文翻译:" << ret->_value << endl;}}
}
void TestBSTree4()
{// 统计水果出现的次数string arr[] = { "苹果", "西瓜", "苹果", "西瓜", "苹果", "苹果", "西瓜",
"苹果", "香蕉", "苹果", "香蕉" };BSTree<string, int> countTree;for (const auto& str : arr){// 先查找水果在不在搜索树中// 1、不在,说明水果第一次出现,则插入<水果, 1>// 2、在,则查找到的节点中水果对应的次数++//BSTreeNode<string, int>* ret = countTree.Find(str);auto ret = countTree.Find(str);if (ret == NULL){countTree.Insert(str, 1);}else{ret->_value++;}}countTree.InOrder();
}
搜索二叉树的实现和应用源码
相关文章:
二叉树(进阶)
文章目录 1.内容安排说明2. 二叉搜索树2.1二叉搜索树的概念2.2二叉搜索树的实现2.3二叉树的性能: 搜索二叉树的应用k 模型kv模型 1.内容安排说明 二叉树在前面c数据结构阶段;已经讲过了;本节取名二叉树进阶的原因是: 1.map和set特…...

Flink之OperatorState
在Flink中状态主要分为三种: Operator State(算子状态)Keyed State(键控状态)Broadcast State(广播状态) 这里简单介绍一下Operator State的使用,说到使用State就必然要使用到Flink的容错机制也就是Checkpoint.具体内容见代码注解 数据源 这里选用Socket作为Source输入,便于…...
Python集成学习和随机森林算法
大家好,机器学习模型已经成为多个行业决策过程中的重要组成部分,然而在处理嘈杂或多样化的数据集时,它们往往会遇到困难,这就是集成学习(Ensemble Learning)发挥作用的地方。 本文将揭示集成学习的奥秘&am…...

代码随想录算法训练营第二十四天| 77 组合
目录 77 组合 暴力 减枝优化 77 组合 暴力 class Solution {List<List<Integer>>res new ArrayList<>();LinkedList<Integer>newList new LinkedList<>();public List<List<Integer>> combine(int n, int k) {dfs(n,k,1);r…...

el-dialog element-ui弹窗
bulkImport.vue 自定义组件 <template> <el-dialog :visible"modalVisible" title"批量导入" centered close"$emit(close)" :fullscreen"true"> <span>弹窗内容</span> <span slot"foot…...
计算机网络的发展
目录 一、计算机网络发展的四个阶段 1、第一阶段:面向终端的计算机网络(20世纪50年代) 2、第二阶段:计算机—计算机网络(20世纪60年代) 3、第三阶段:开放式标准化网络(20世纪70年…...

官宣!Wayland正式支持基于IntelliJ的IDE
对于基于IntelliJ IDE的Linux用户来说,一项令人期待的进步即将到来 – 对 Wayland 显示服务器协议的支持。 这项更新将带来许多好处,包括解决古老的分数缩放问题以及在与适用于 Linux 的 Windows 子系统 (WSLg)(在底层运行 Wayland 服务器&am…...
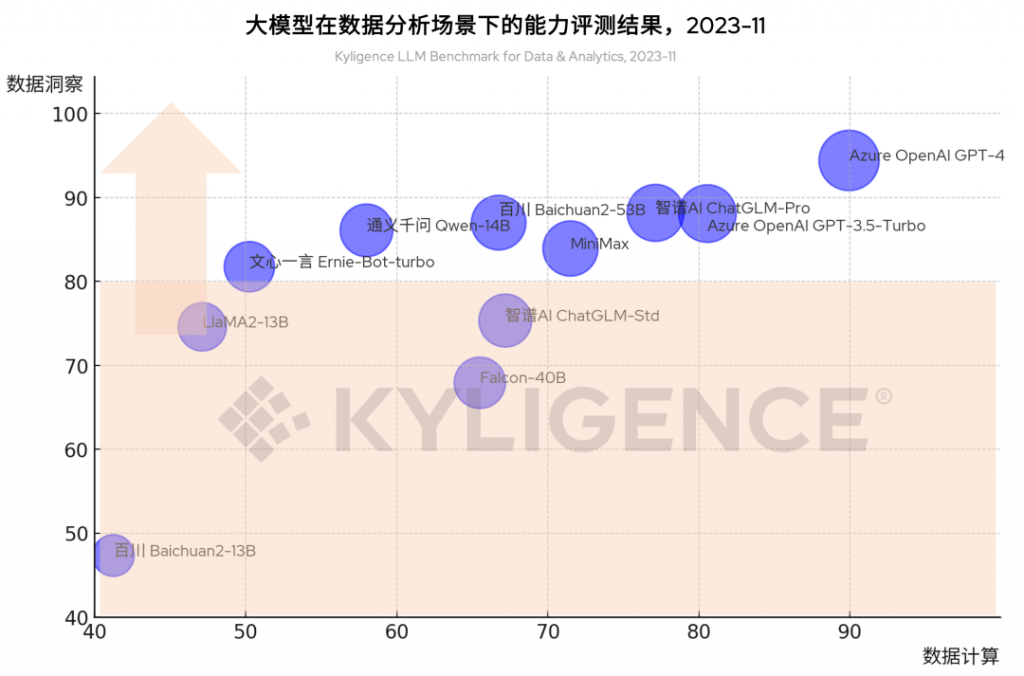
大模型在数据分析场景下的能力评测|进阶篇
做数据分析,什么大模型比较合适? 如何调优大模型,来更好地做数据计算和洞察分析? 如何降低整体成本,同时保障分析体验?10月25日,我们发布了数据分析场景下的大模型能力评测框架(点击…...
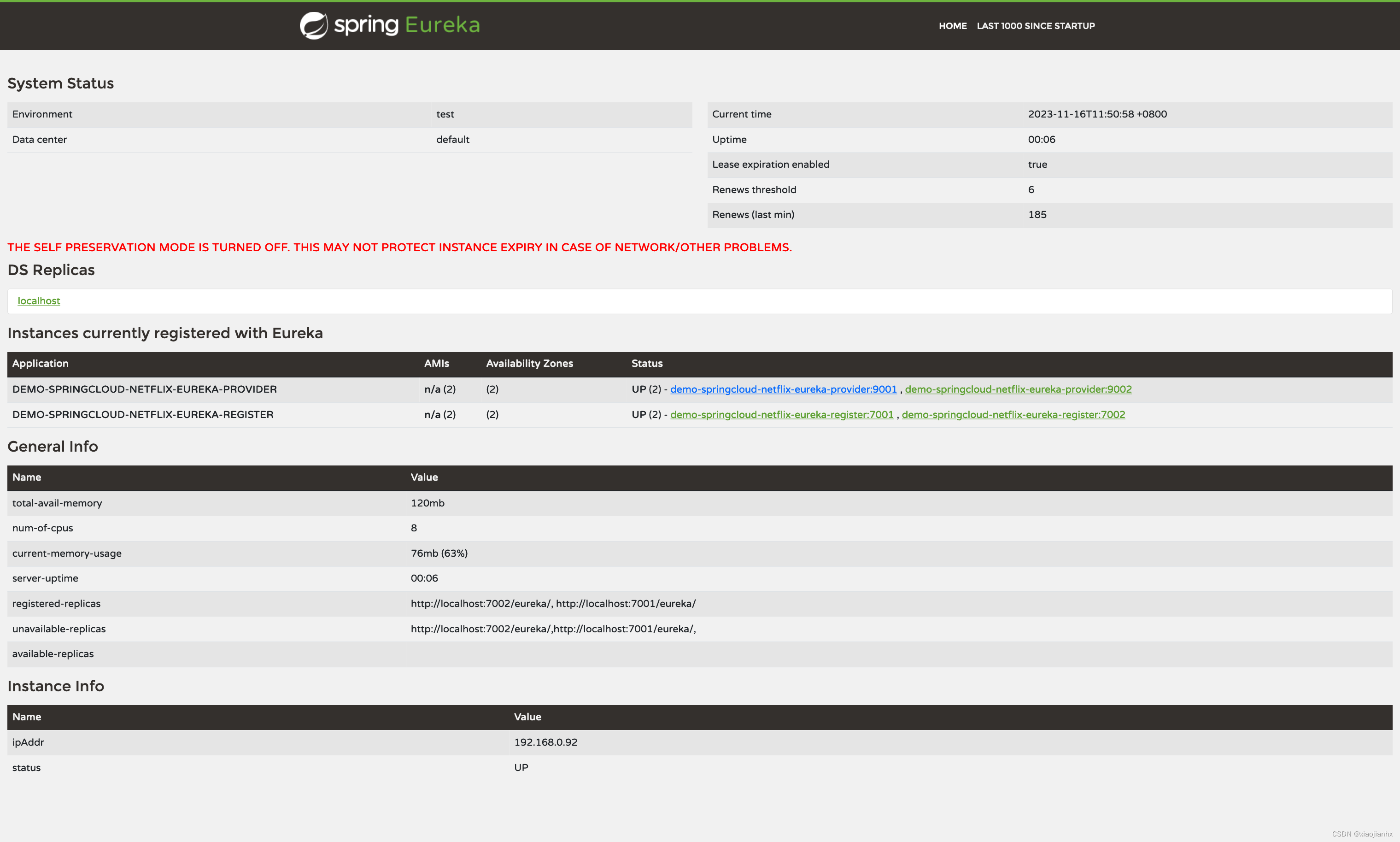
服务注册发现 springcloud netflix eureka
文章目录 前言角色(三个) 工程说明基础运行环境工程目录说明启动顺序(建议):运行效果注册与发现中心服务消费者: 代码说明服务注册中心(Register Service)服务提供者(Pro…...
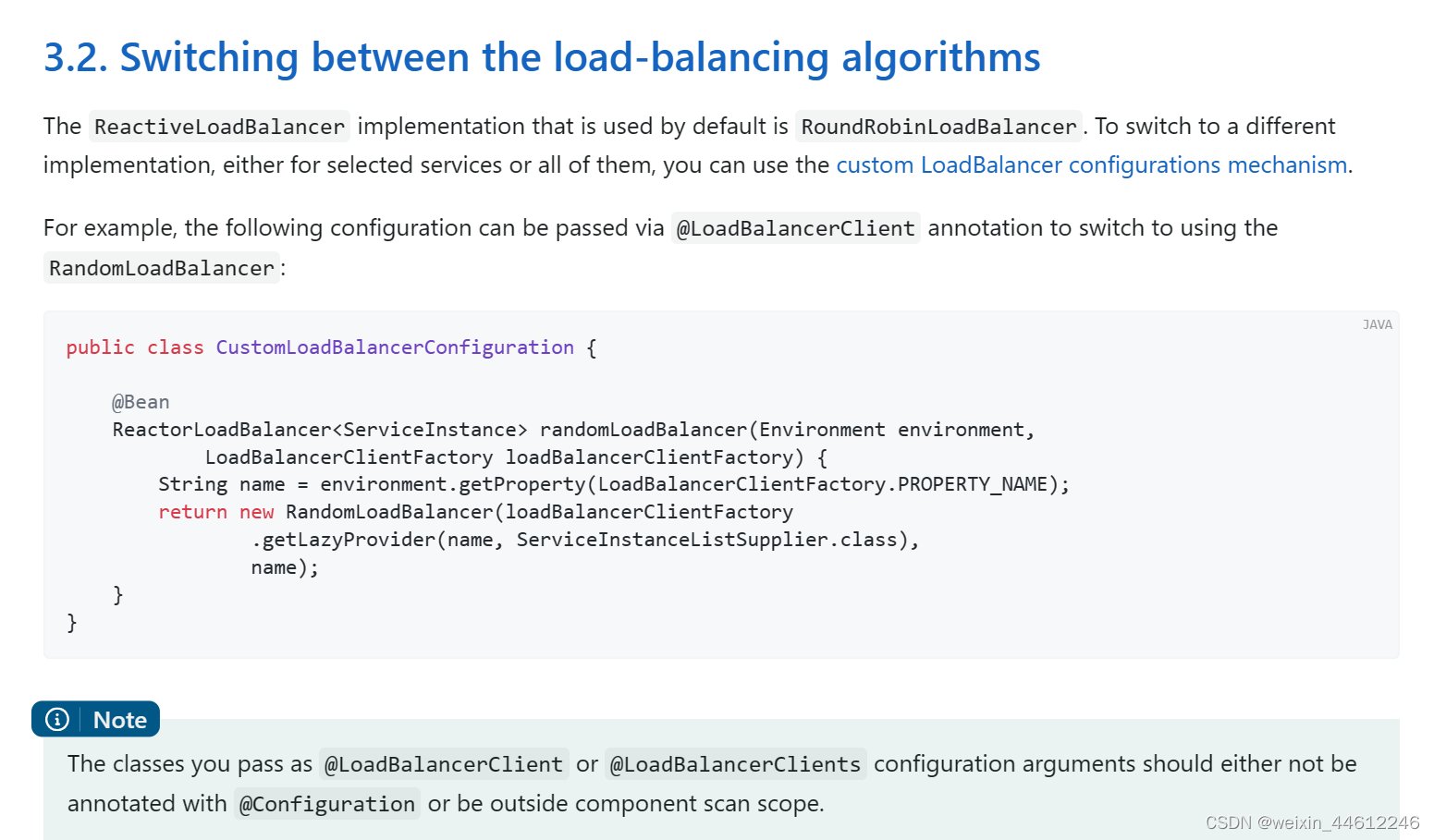
Spring cloud负载均衡@LoadBalanced LoadBalancerClient
LoadBalance vs Ribbon 由于Spring cloud2020之后移除了Ribbon,直接使用Spring Cloud LoadBalancer作为客户端负载均衡组件,我们讨论Spring负载均衡以Spring Cloud2020之后版本为主,学习Spring Cloud LoadBalance,暂不讨论Ribbon…...
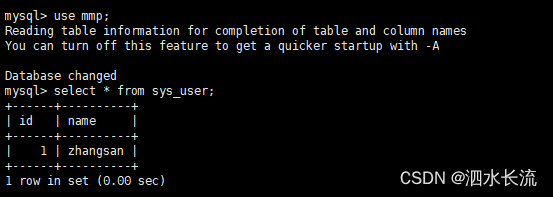
6.运行mysql容器-理解容器数据卷
运行mysql容器-理解容器数据卷 1.什么是容器数据卷2.如何使用容器数据卷2.1 数据卷挂载命令2.2 容器数据卷的继承2.3 数据卷的读写权限2.4 容器数据卷的小实验(加深理解)2.4.1 启动挂载数据卷的centos容器2.4.2 启动后,在宿主机的data目录下会…...

golang学习笔记——查找质数
查找质数 编写一个程序来查找小于 20 的所有质数。 质数是大于 1 的任意数字,只能被它自己和 1 整除。 “整除”表示经过除法运算后没有余数。 与大多数编程语言一样,Go 还提供了一种方法来检查除法运算是否产生余数。 我们可以使用模数 %(百…...
C++ 基础二
文章目录 四、流程控制语句4.1 选择结构4.1.1 if语句 4.1.2 三目运算符4.1.3 switch语句注意事项 4.1.4 if和switch的区别【CHAT】4.2 循环结构4.2.1 while循环语句4.2.2 do...while循环语句 4.2.3 for循环语句九九乘法表 4.3 跳转语句4.3.1 break语句4.3.2 continue语句4.3.3 …...

鼎盛合 | 宠物智能投食机方案设计开发
养宠物是一件治愈并解压的事情,与动物的相处中能够释放压力,并在与宠物的互动中小可爱们往往能带给你一种治愈的力量,所以养宠物成为了人们尤为热衷的事情。我们生活中随处可见主人与宠物相处的温馨画面,但养宠物也有些问题在困扰…...
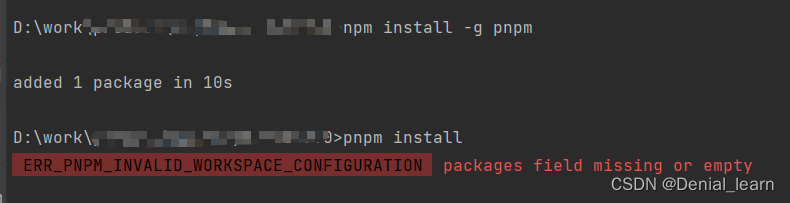
ERR_PNPM_INVALID_WORKSPACE_CONFIGURATION packages field missing or empty
vue执行 pnpm install命令时,报 ERR_PNPM_INVALID_WORKSPACE_CONFIGURATION packages field missing or empty错,在网上查询了很久,也没有传出来结果,最后发现是pnpm的版本不对引起的。 我先执行的是npm install -g pnpm&…...
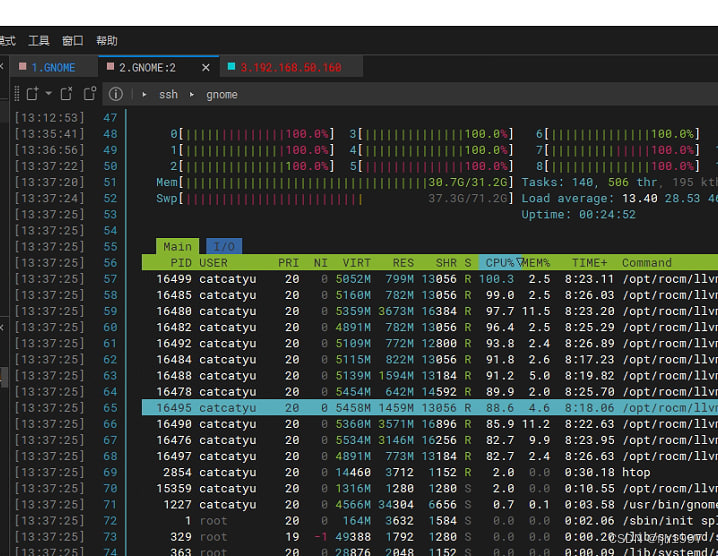
ubuntu 23.04从源码编译安装rocm运行tensorflow-rocm
因为ubuntu22.04的RDP不支持声音转发,所以下载了ubuntu23.04.但官方的rocm二进制包最高只支持ubuntu22.04,不支持ubuntu 23.04,只能自己从源码编译虽然有网友告诉我可以用docker运行rocm。但是我已经研究了好几天,沉没成本太多&am…...

echarts 图表文字大小自适应 字体大小自适应
将文字大小自适应方法挂载到全局 //main.js Vue.prototype.fontSize function(res) {// 获取视口宽度const clientWidth window.innerWidth ||document.documentElement.clientWidth ||document.body.clientWidth;if (!clientWidth) return; // 如果获取不到视口宽度…...

【项目】云备份系统基础功能实现
目录 一.项目介绍1.云备份认识2.服务端程序负责功能与功能模块划分3.客户端程序负责功能与功能模块划分4.开发环境 二.环境搭建1.gcc升级7.3版本2.安装jsoncpp库3.下载bundle数据压缩库4.下载httplib库 三.第三方库认识1.json(1)json认识(2)jsoncpp认识(3)json实现序列化(4)jso…...

【Shell脚本13】Shell 文件包含
Shell 文件包含 和其他语言一样,Shell 也可以包含外部脚本。这样可以很方便的封装一些公用的代码作为一个独立的文件。 Shell 文件包含的语法格式如下: . filename # 注意点号(.)和文件名中间有一空格或source filename实例 创建两个 shell 脚本文件…...
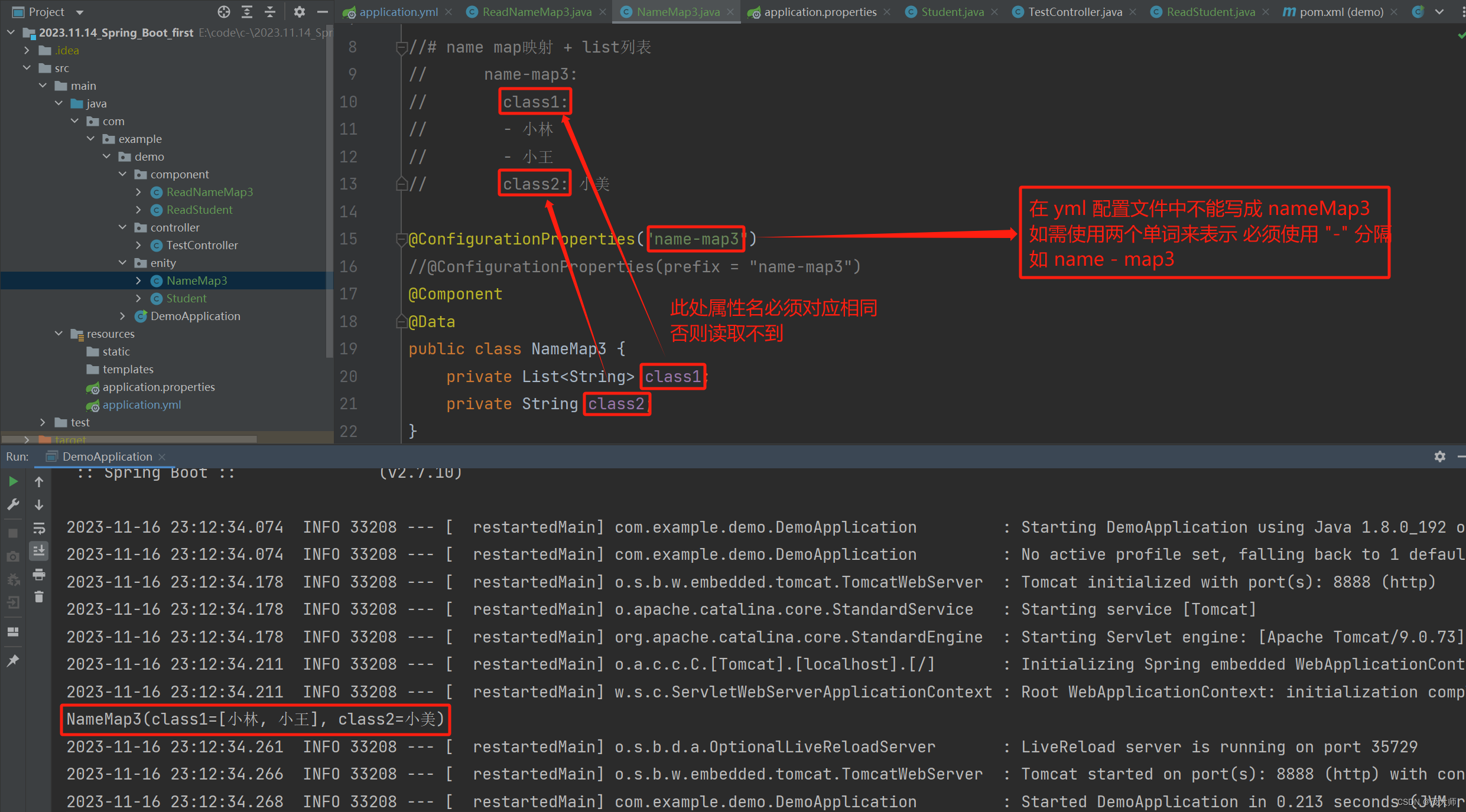
2023.11.15 关于 Spring Boot 配置文件
目录 引言 Spring Boot 配置文件 properties 配置文件说明 基本语法 读取配置文件 优点 缺点 yml 配置文件说明 基本语法 读取配置文件 yml 配置不同数据数据类型及 null 字符串 加单双引号的区别 yml 配置 列表(List) 和 映射(…...

【AI Agent保险行业落地实战指南】:20年专家亲授5大高价值场景与避坑清单
更多请点击: https://intelliparadigm.com 第一章:AI Agent在保险行业的战略定位与演进逻辑 AI Agent正从辅助工具跃升为保险机构的核心数字员工,其战略定位已由单一任务自动化转向端到端业务协同中枢。在监管趋严、客户期望升级与数据资产加…...

在CentOS 7上搞定Cadence IC618、XCELIUM和SPECTRE全家桶:一个Modulefile环境变量配置全攻略
在CentOS 7上搞定Cadence IC618、XCELIUM和SPECTRE全家桶:一个Modulefile环境变量配置全攻略对于芯片设计工程师而言,Cadence工具链的部署往往意味着数天的系统调优和环境调试。当IC设计、数字仿真和电路模拟三大核心工具需要协同工作时,环境…...

差分隐私矩阵机制与FFT优化:保护多轮迭代计算的高效方法
1. 差分隐私矩阵分解:从理论到工程实践在联邦学习、推荐系统这些需要频繁进行多轮迭代计算的场景里,我们常常面临一个核心矛盾:既要利用全体参与者的数据来训练一个高质量的全局模型,又要确保任何单个参与者的敏感信息不会在训练过…...
)
CentOS 7上解决soffice转换doc到docx报错‘no export filter‘的完整指南(附字体安装)
CentOS 7服务器深度修复:soffice文档转换no export filter全链路解决方案当你在CentOS 7服务器上执行soffice --convert-to docx命令时,终端突然抛出Error: no export filter的红色警告——这不是简单的命令错误,而是典型的环境依赖链断裂。作…...

量子计算中的SWAP门原理与应用解析
1. 量子计算中的SWAP门基础原理量子计算区别于经典计算的核心在于量子比特(qubit)的叠加态和纠缠态特性。在量子线路设计中,SWAP门作为基础量子逻辑门之一,扮演着量子信息交换的关键角色。与经典计算中的位交换不同,量…...

7z2john报错Compress::Raw::Lzma.pm缺失的原理与修复
1. 这不是你的错:当7z2john突然报错“Cant locate Compress::Raw::Lzma.pm”时,你其实只缺一个Perl模块刚打开终端准备提取7z压缩包里的密码哈希,7z2john archive.7z > hash.txt回车一敲,屏幕却猛地跳出一行红字:Ca…...

新手学习Linux系统的11点建议
随着Linux应用的扩展许多朋友开始接触Linux,根据学习Windwos的经验往往有一些茫然的感觉:不知从何处开始学起。这里介绍学习Linux的一些建议。一、从基础开始:常常有些朋友在Linux论坛问一些问题,不过,其中大多数的问题…...

纯血鸿蒙彻底告别安卓依赖:HarmonyOS 7.0 即将正式发布,国产操作系统迎来真正转折点
OpenHarmony 7.0 Beta1已经悄然上线GitCode,开发者体验官招募也同步启动。多数人还在讨论鸿蒙又更新了版本,但很少有人注意到这次更新的核心变化:纯血鸿蒙终于移除了对Android APK兼容层的依赖。这仅仅是一次常规版本迭代吗?还是国…...

AI答案优化效果可以靠哪些第三方数据验证?
先给结论:AI答案优化效果要做三层交叉验证AI 答案优化、GEO 服务的效果,不应只听服务商自述,也不适合只靠单张 AI 回答截图判断。更稳妥的做法,是用三层数据交叉验证:AI回答层数据:看品牌是否被提及、位置是…...

Claude ROI计算模型:3步完成TCO建模→价值映射→敏感性压测,附金融/医疗/制造三大行业参数包
更多请点击: https://kaifayun.com 第一章:Claude ROI计算模型:3步完成TCO建模→价值映射→敏感性压测,附金融/医疗/制造三大行业参数包 Claude ROI计算模型专为AI代理落地设计,将传统IT投资回报分析升级为可量化、可…...