ROS1学习笔记:ROS中的坐标管理系统(ubuntu20.04)
参考B站古月居ROS入门21讲:ROS中的坐标系管理系统
基于VMware Ubuntu 20.04 Noetic版本的环境
文章目录
- 一、机器人中的坐标变换
- 二、TF功能包
- 三、小海龟跟随实验
- 3.1 启动实验
- 3.2 查看当前的TF树
- 3.3 坐标相对位置可视化
- 3.3.1 tf_echo
- 3.3.2 rviz
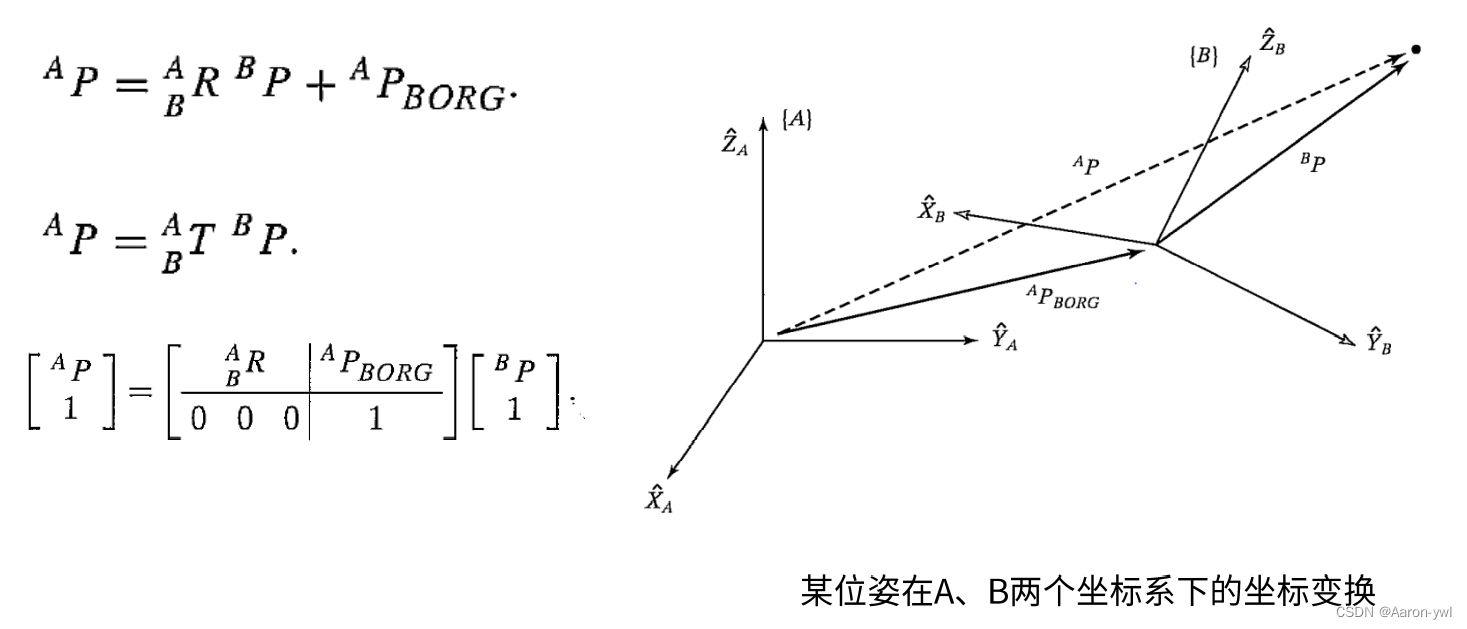
一、机器人中的坐标变换
机器人运动学的核心,描述任意两个坐标系之中任意两个向量之间的变换,可以用一个4×4的变换矩阵(Transformation Matrices)来描述它的平移和旋转变化。
变换矩阵中有包括旋转矩阵(Rotation Matrix)的信息和位置移动(Translation)的信息。
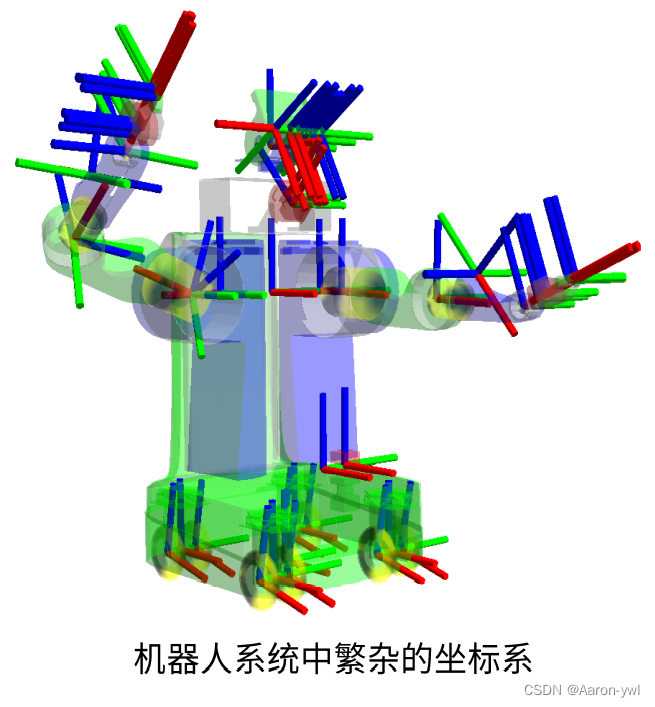
二、TF功能包
一个机器人系统中,通常会涉及到很多坐标系的运算,这免不了大量的矩阵运算。我们可以使用ROS中的TF(Transform)功能包来解决问题。
TF功能包的特点:默认能记录10秒内机器人所以坐标系的位置关系。
TF坐标变化如何实现?
- 广播TF变换
- 监听TF变换
在ROS Master启动后,启动TF后,会在后台维护一个名为“TF树(TF Tree)”的数据结构。所有的坐标系都是通过树形结构保存在这个树结构当中,当有结点想查询某两个坐标系之间的关系的话,直接可以查询这个TF Tree来得到。
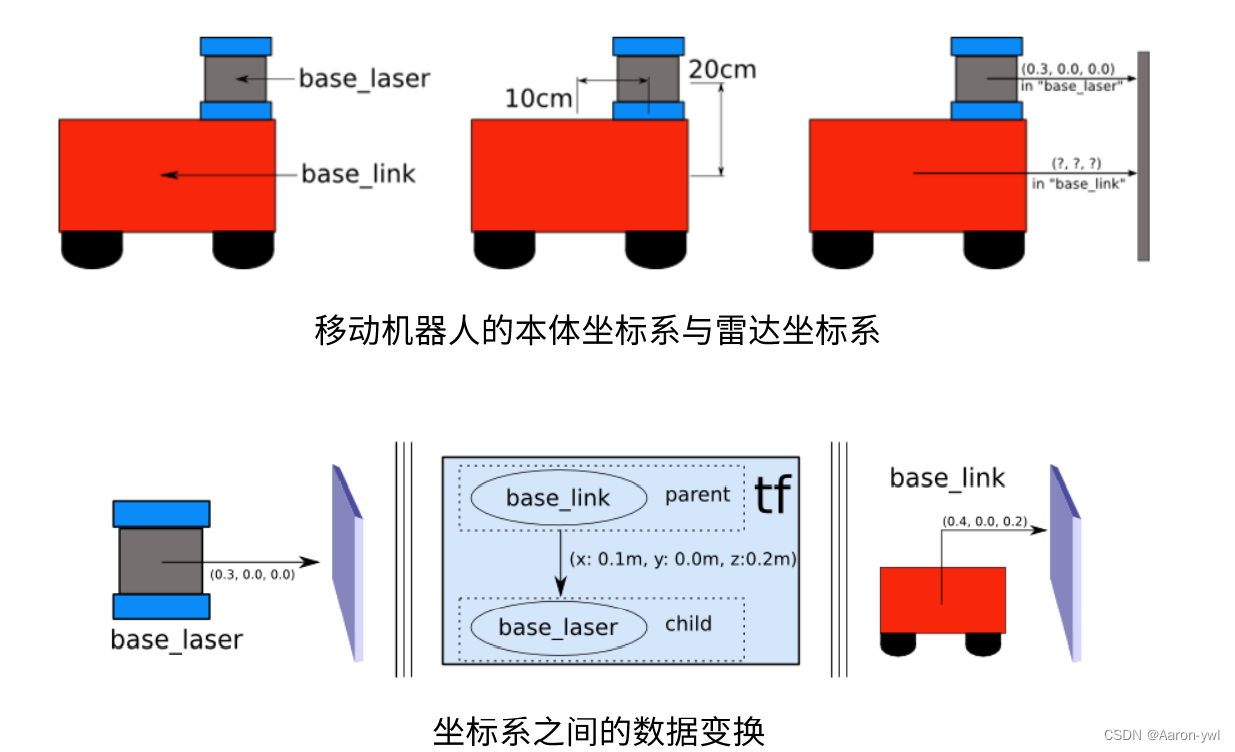
比如这个TF的例子:
这辆带激光雷达的车,车体是以base_link为坐标系的,激光雷达是以base_laser为坐标系的,可以看到base_laser是base_link向x轴平移了0.1m,向z轴平移了0.2m,y轴没有平移。 当base_laser测到离墙面的距离为0.3m,即向量(0.3,0,0)时,就可以根据图下方的TF
tree进行坐标系之间的数据变换的运算,从而算出base_link的相对与测距点的相对向量(0.4,0,0.2)。
三、小海龟跟随实验
我们通过一个小程序来实现小海龟跟随另一个小海龟的实验,并通过可视化的方法来理解坐标系的变换。
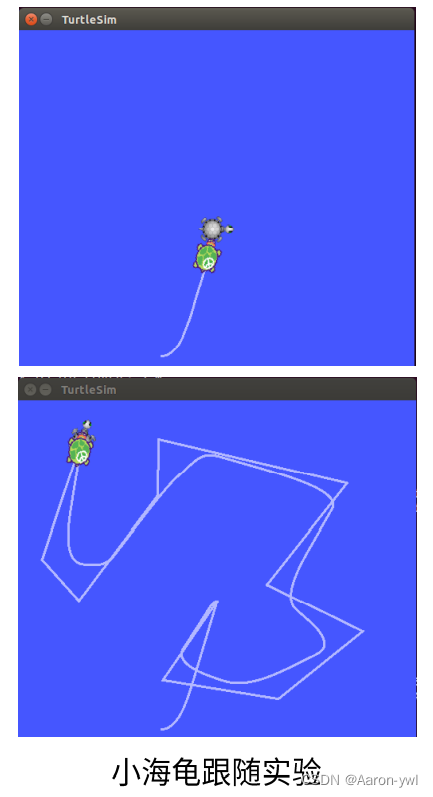
在这个实验中,我们先生成一只小乌龟,然后再生成一只新的小乌龟,新的小乌龟会自动跟随旧的小乌龟,直到重合。
3.1 启动实验
在进行实验之前,由于noetic的版本是预制了这个程序的,但是直接运行会报错,原因是python解释器的指向问题,我们先打开终端输入以下命令:
cd /usr/bin/
sudo rm -r python #出现rm -r 找不到文件的忽略即可
sudo cp python3 python
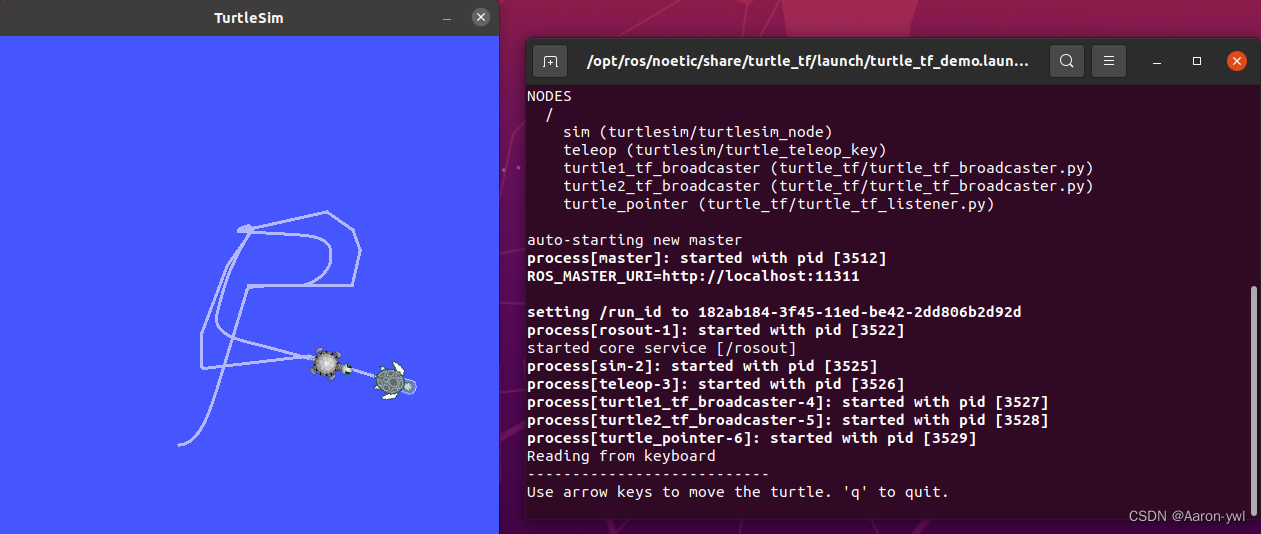
执行完后我们就可以运行这个程序了:
roslaunch turtle_tf turtle_tf_demo.launch
打开后我们就会生成两只小乌龟,我们通过键盘控制其中一只小乌龟,另一只就会自动跟随。
3.2 查看当前的TF树
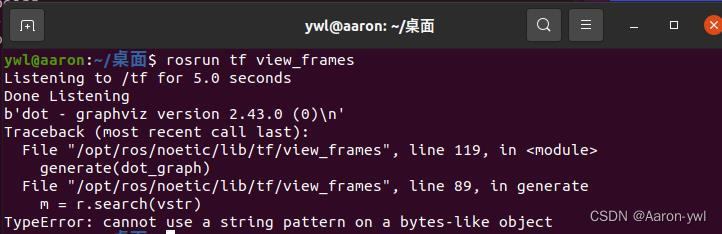
我们可以查看当前的TF数,查看坐标系之间的关系:
rosrun tf view_frames
但是直接运行会报错,无法生成pdf文件
我们打开如图所示的报错文件夹,加上如图所示的这句话:
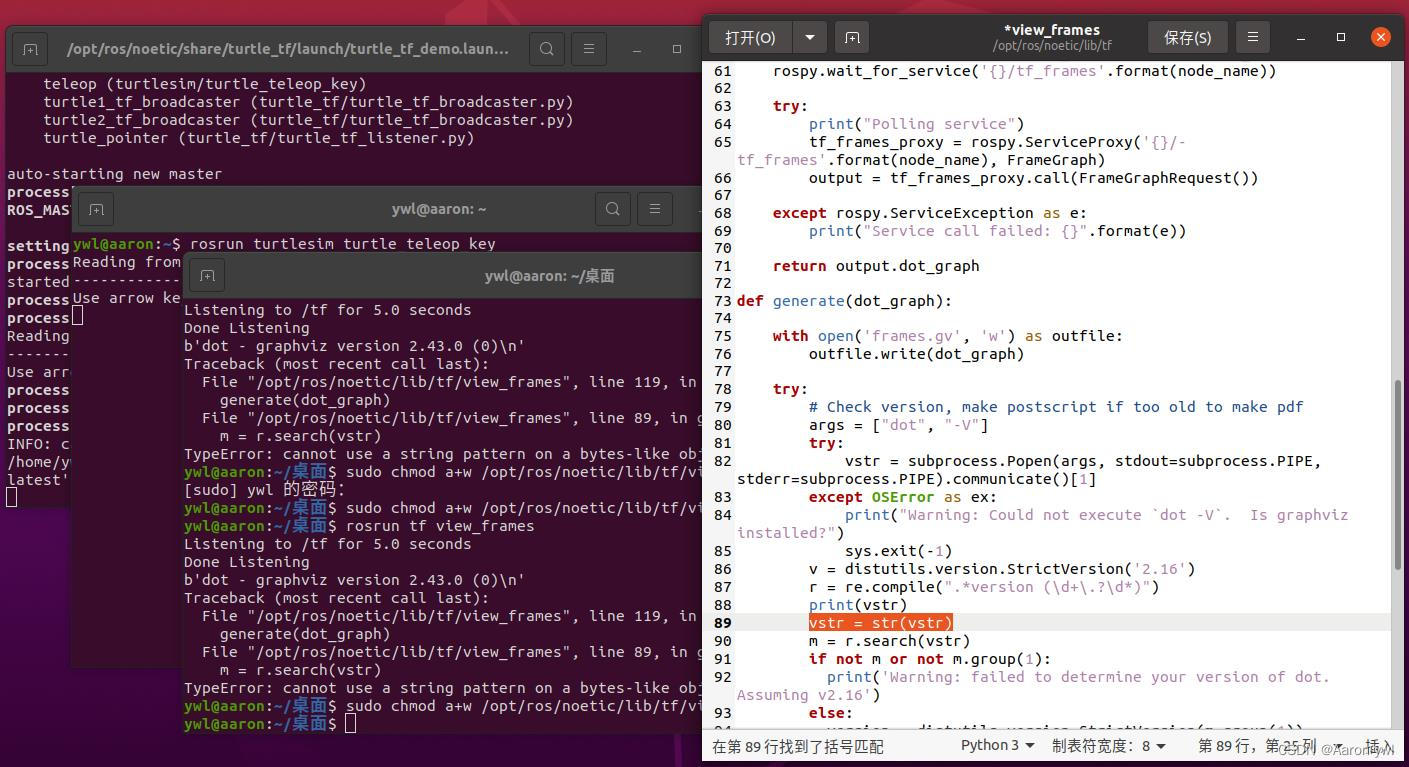
再运行:
rosrun tf view_frames
成功生成了pdf文件:
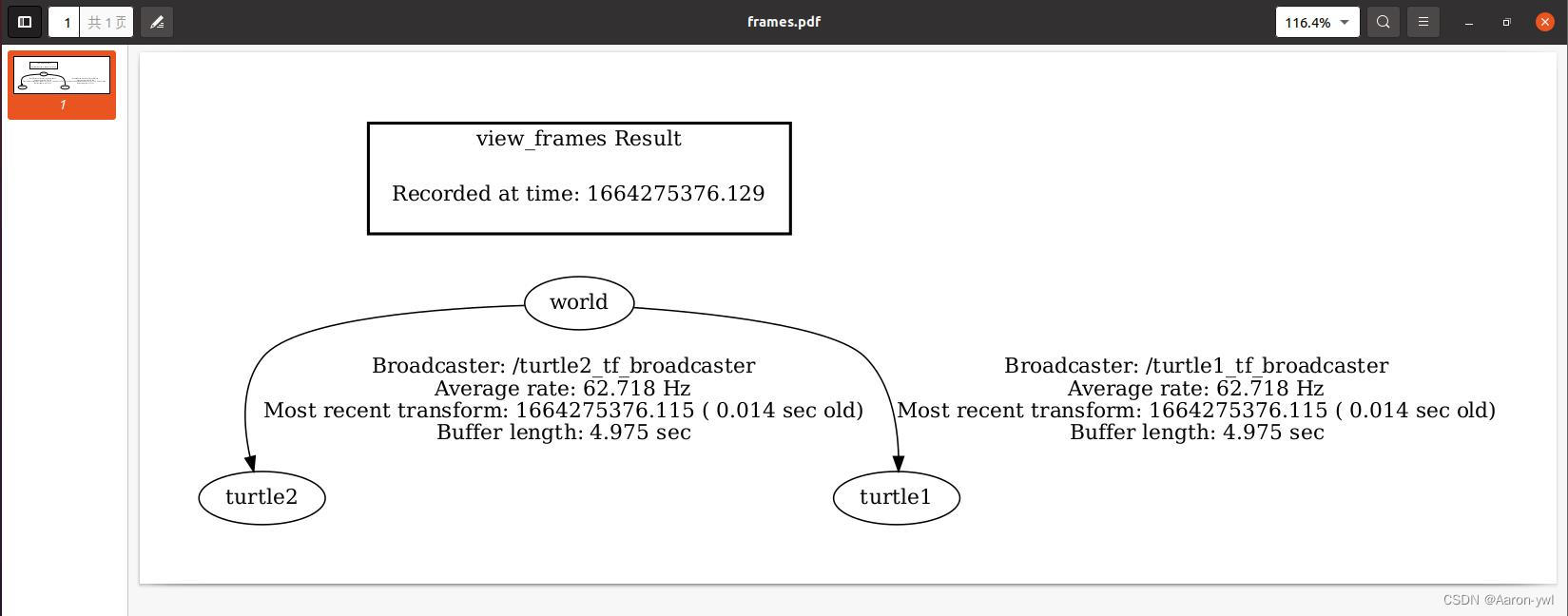
我们可以看到这棵树展示了当前坐标系之间的位置关系,turtle1和turtle2是相对于world坐标系变化的。
3.3 坐标相对位置可视化
3.3.1 tf_echo
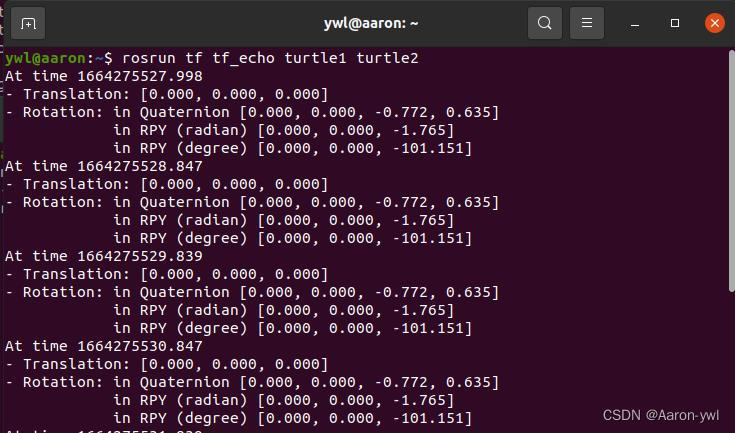
我们如果想看两只小海龟的相对变换关系,可输入:
rosrun tf tf_echo turtle1 turtle2
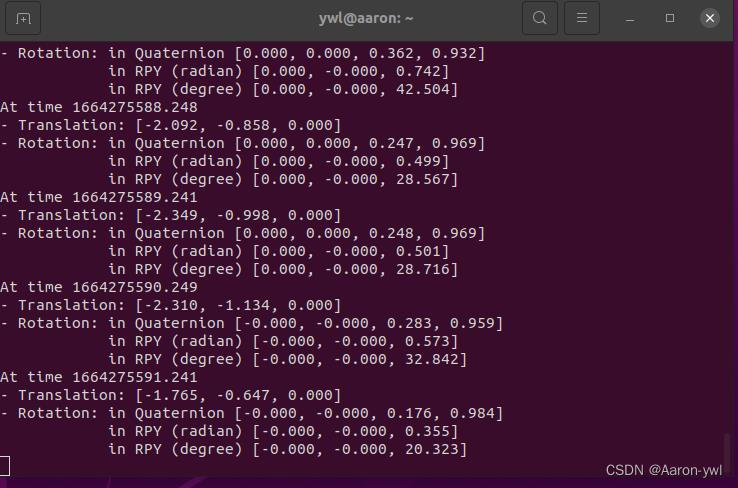
我们如果操控小海龟移动,则位置会发生变化:
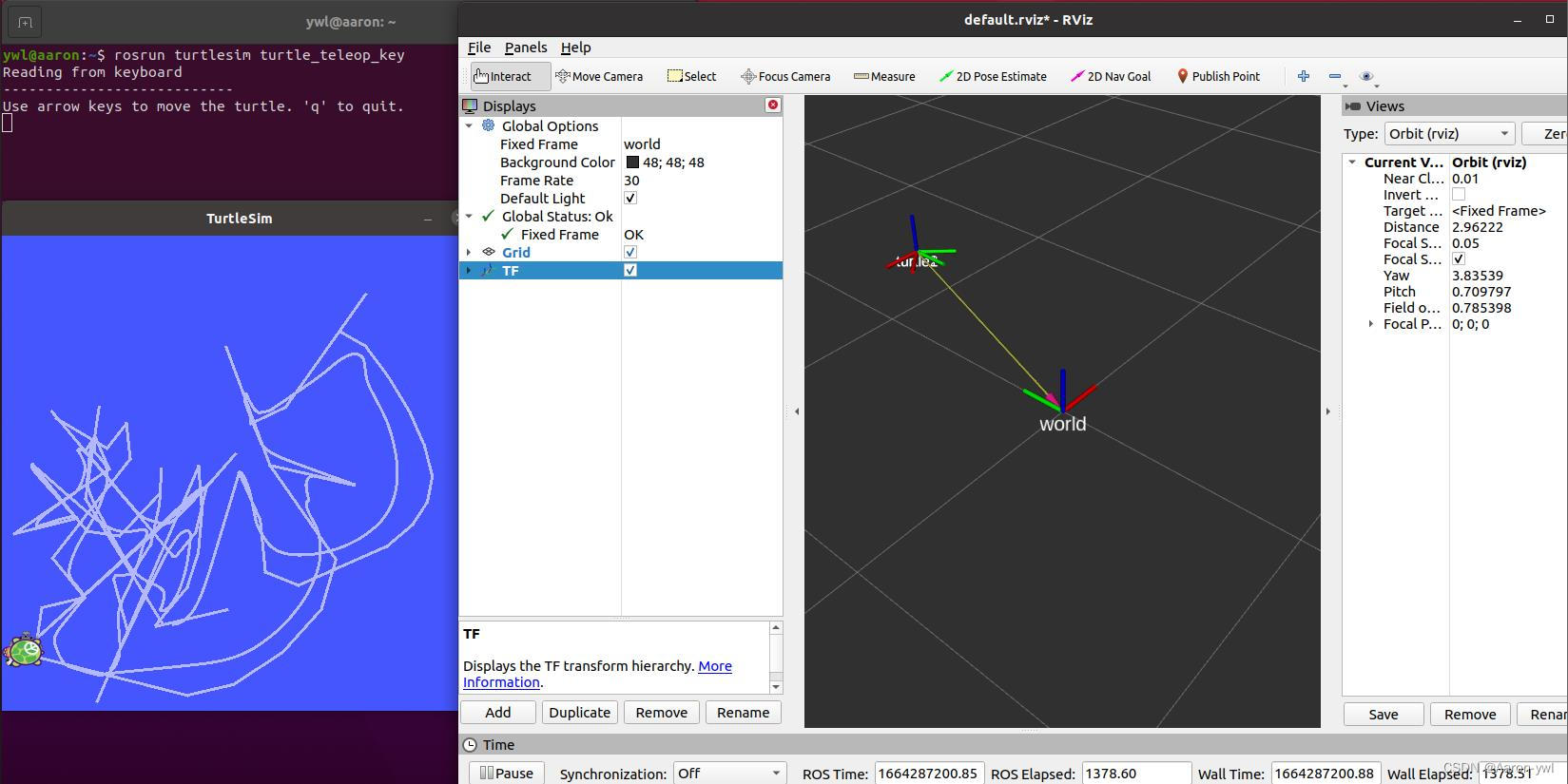
3.3.2 rviz
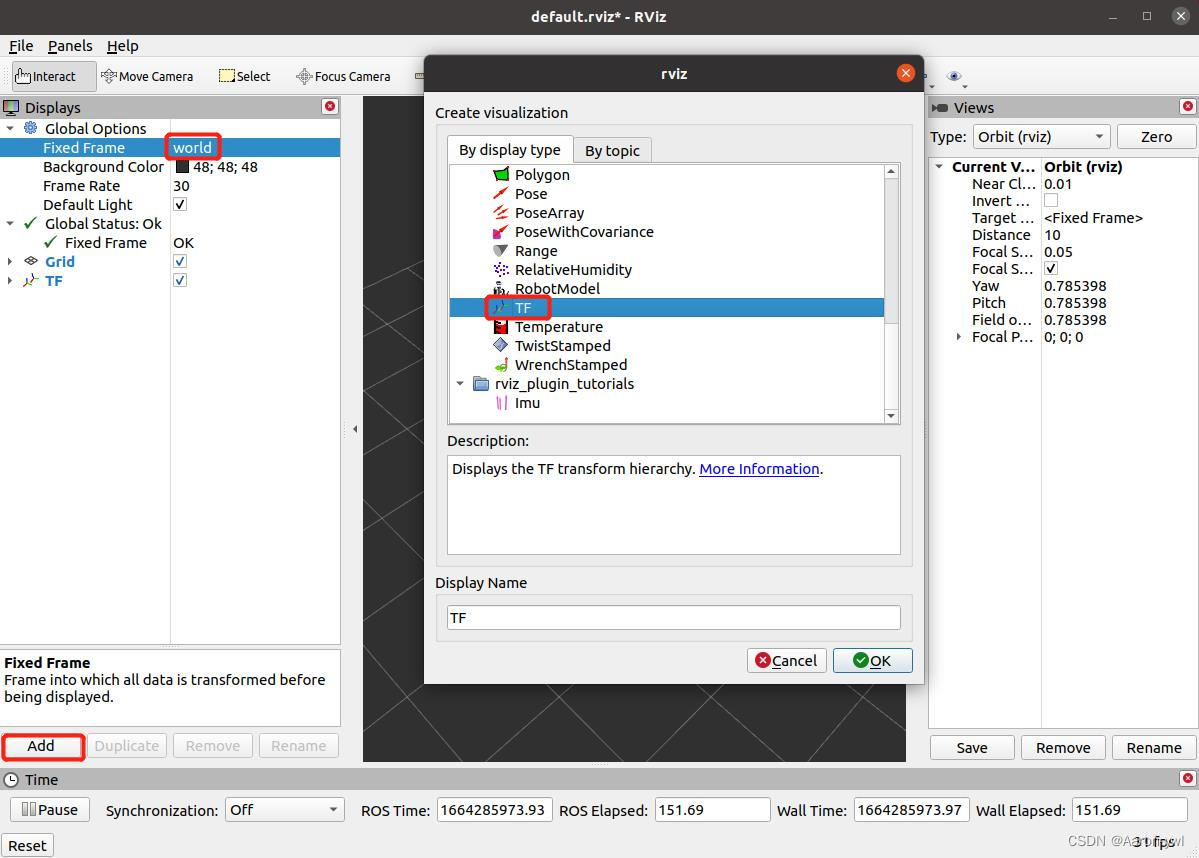
我们可以打开rviz工具:
rosrun rviz rviz -d `rospack find turtle_tf` /rviz/turtle_rviz.rviz
打开界面之后,在上面的Fixed Frame选择world
在左下角的add添加TF。就可以看到三个坐标系了。
最后,控制小海龟运动,坐标系发生改变,然后坐标系turtle2原点会靠近turtle1原点:
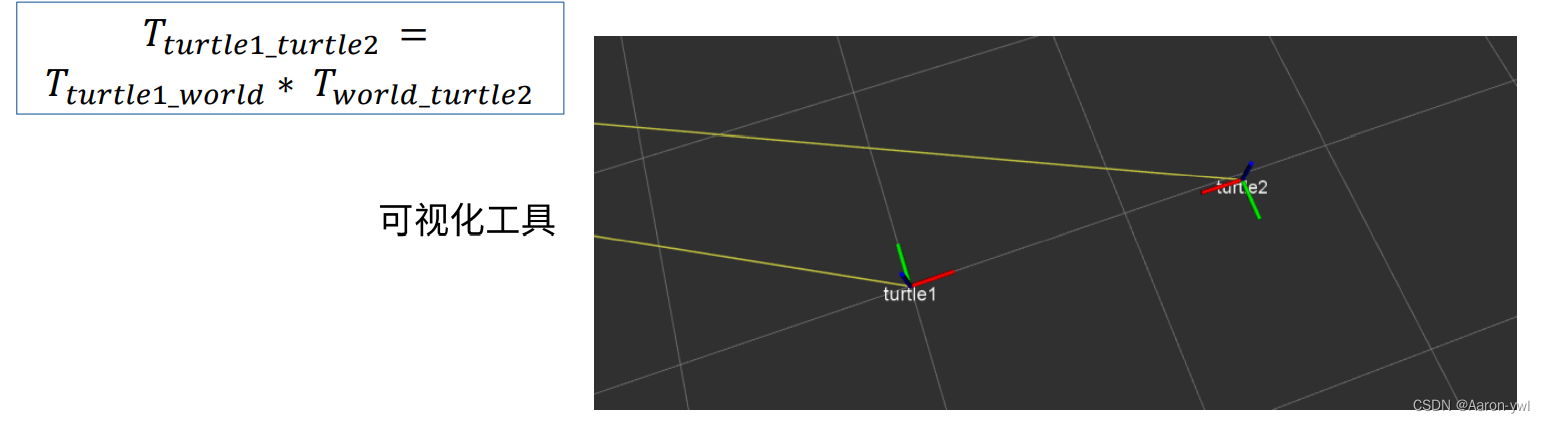
下图中左边变换矩阵的运算,其实就是坐标移动的本质。两个坐标系相对于world坐标系的变换的乘积可以求得两个坐标系相对的变换关系。
相关文章:
ROS1学习笔记:ROS中的坐标管理系统(ubuntu20.04)
参考B站古月居ROS入门21讲:ROS中的坐标系管理系统 基于VMware Ubuntu 20.04 Noetic版本的环境 文章目录一、机器人中的坐标变换二、TF功能包三、小海龟跟随实验3.1 启动实验3.2 查看当前的TF树3.3 坐标相对位置可视化3.3.1 tf_echo3.3.2 rviz一、机器人中的坐标变换…...

requests---(2)session简介与自动写博客
目录:导读 session简介 session登录 自动写博客 获取登录cookies 抓取写博客接口 requests自动写博客 写在最后 http协议是无状态的,也就是每个请求都是独立的。那么登录后的一系列动作,都需要用cookie来验证身份是否是登录状态&#…...
基于 HAProxy + Keepalived 搭建 RabbitMQ 高可用集群
RabbitMQ 集群 通常情况下,在集群中我们把每一个服务称之为一个节点,在 RabbitMQ 集群中,节点类型可以分为两种: 内存节点:元数据存放于内存中。为了重启后能同步数据,内存节点会将磁盘节点的地址存放于磁…...
基于51单片机和proteus的智能调速风扇设计
此智能风扇是基于51单片机和proteus的仿真设计,功能如下: 1. Timer0 PWM控制电机转速 2. DHT11采集温湿度 3. LCD1602显示温湿度及电机状态 4. 按键控制电机加减速启停等 5. 串口控制电机加减速启停等 功能框图如下: Proteus仿真界面如下…...
SQL Server开启CDC的完整操作过程
这里写自定义目录标题写在前面SQL Server开启CDC1. 将指定库的实例先开启CDC2. 开启需要开启CDC的表3. 关闭CDC功能更详细信息参照官网写在前面 鉴于老旧数据的结构和项目都在sqlserver上存储,且迁移成本巨大,当下要为sqlserver的存储过程减负。要将一部…...
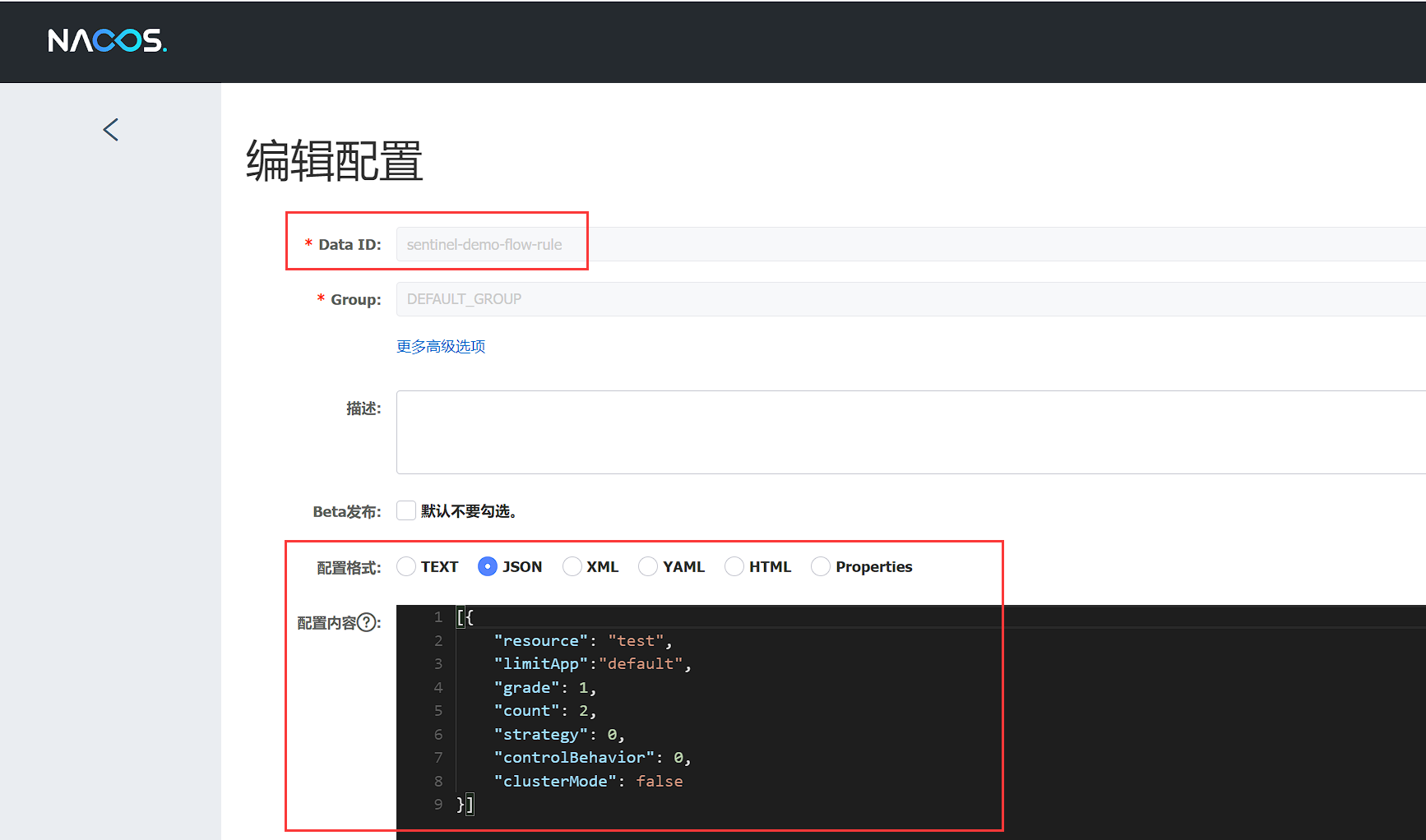
【Spring Cloud Alibaba】008-Sentinel
【Spring Cloud Alibaba】008-Sentinel 文章目录【Spring Cloud Alibaba】008-Sentinel一、服务雪崩1、概述2、解决方案常见的容错机制二、Sentinel:分布式系统的流量防卫兵1、**Sentinel** 概述简介特性Sentinel 的开源生态Sentinel 的历史2、Sentinel 基本概念资源…...

解读CRC校验计算
个人随笔 (Owed by: 春夜喜雨 http://blog.csdn.net/chunyexiyu) 参考:http://www.sunshine2k.de/articles/coding/crc/understanding_crc.html 参考:https://en.wikipedia.org/wiki/Cyclic_redundancy_check 参考:https://www.cnblogs.com/…...
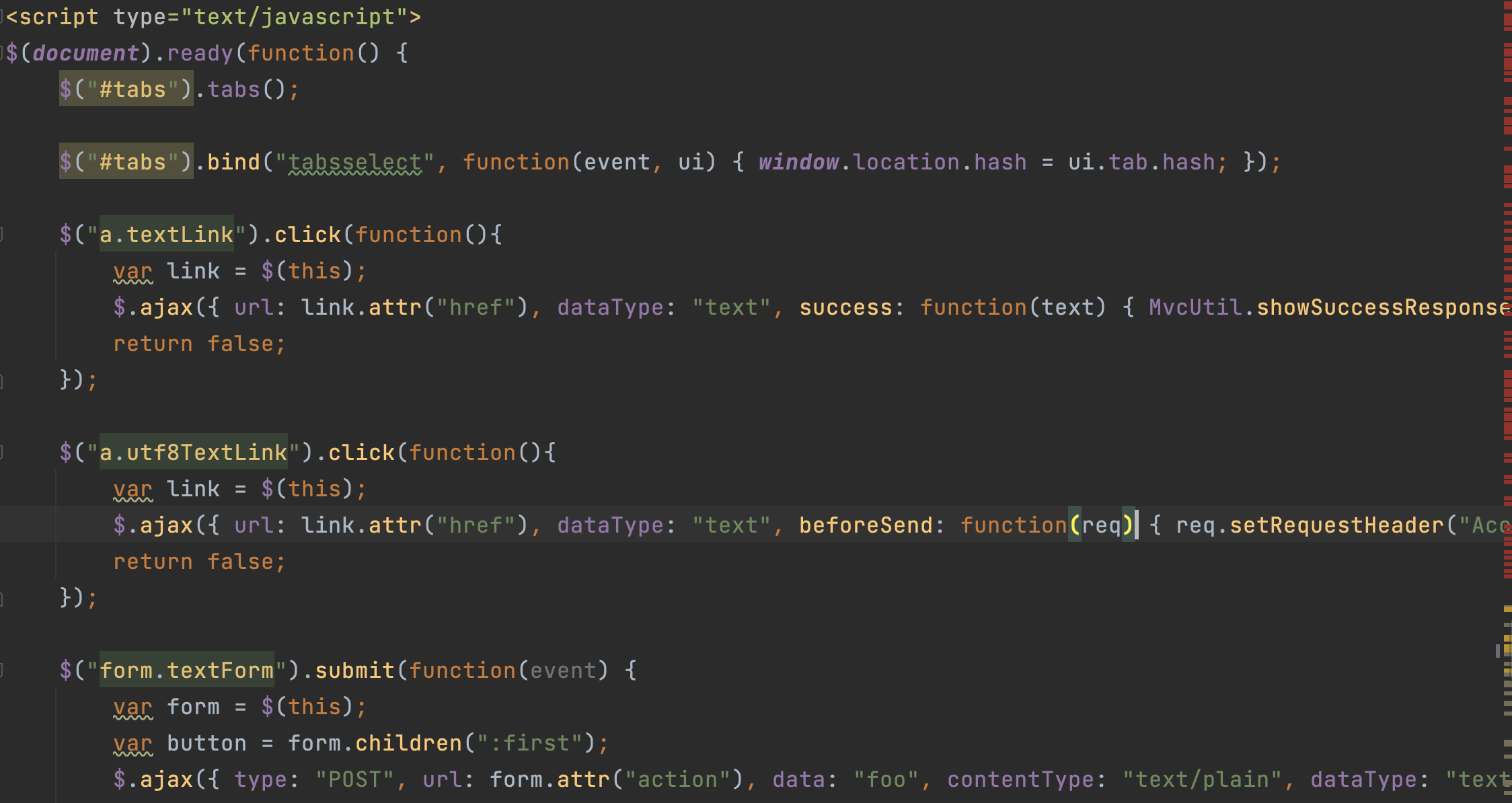
深入理解Spring MVC下
上一篇博客从理论概念上来梳理Spring MVC相关知识,此篇博客将通过spring官网提供showcase代码为例子,详细介绍showcase代码中包含的各个例子是如何实现的。官网的showcase代码包含的主要例子包括,Demo地址:Mapping Requests&#…...

【Linux】ssh-keygen不需要回车,自动生成密钥,批量免密操作!
使用命令ssh-keygen 需要手动敲击回车,才会生成密钥,如下代码所示 [rootlocalhost ~]# ssh-keygen Generating public/private rsa key pair. Enter file in which to save the key (/root/.ssh/id_rsa): Enter passphrase (empty for no passphrase):…...

C/C++开发,无可避免的内存管理(篇四)-智能指针备选
一、智能指针 采用C/C开发堆内存管理无论是底层开发还是上层应用,无论是开发新手,还是多年的老手,都会不自觉中招,尤其是那些不是自己一手经历的代码,要追溯问题出在哪里更是个麻烦事。C/C程序常常会遇到程序突然退出&…...
VMware ESXi给虚拟机扩容
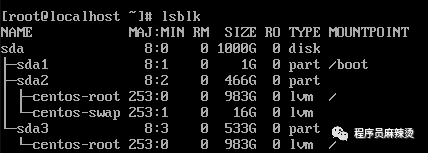
用ESXi管理的虚拟机硬盘空间不够了,讲一下如何进行扩容。 一、查看现状 通过如下三个命令,可以查看硬盘情况,可以看到只有500G,已经用了45%。这次我们再扩容500G。 df -Th lsblk fdisk -lIDE磁盘的文件名为 /de…...
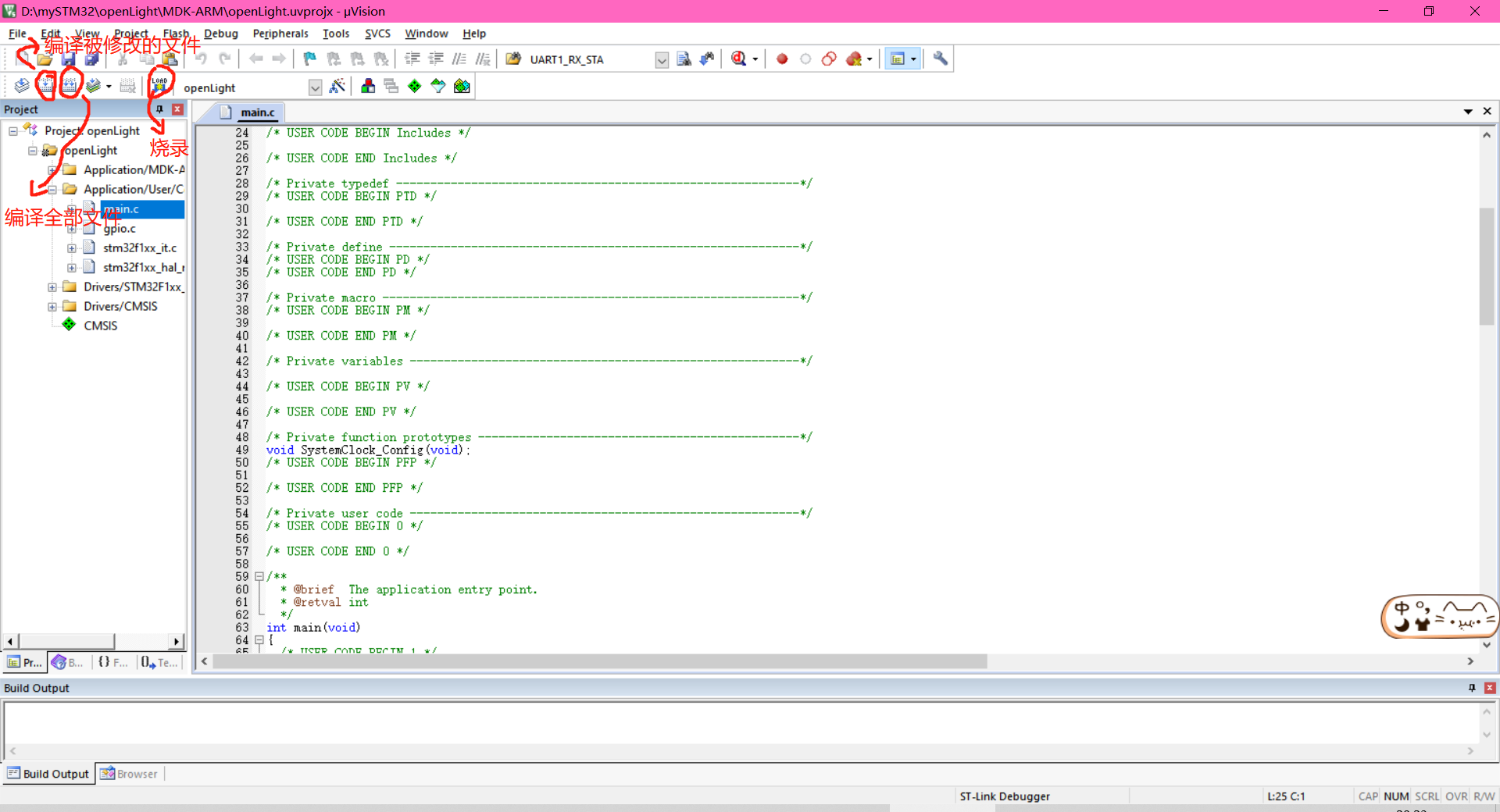
认识STM32和如何构建STM32工程
STM32介绍什么是单片机单片机(Single-Chip Microcomputer)是一种集成电路芯片,把具有数据处理能力的中央处理器CPU、随机存储器RAM、只读存储器ROM、多种/0口和中断系统、定时器/计数器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电…...

RabbitMQ延迟队列
目录 一、概念 二、使用场景 三、RabbitMQ 中的 TTL (一)队列设置 TTL (二)消息设置 TTL (三)两者的区别 四、整合SpringBoot实现延迟队列 (一)创建项目 (二&am…...
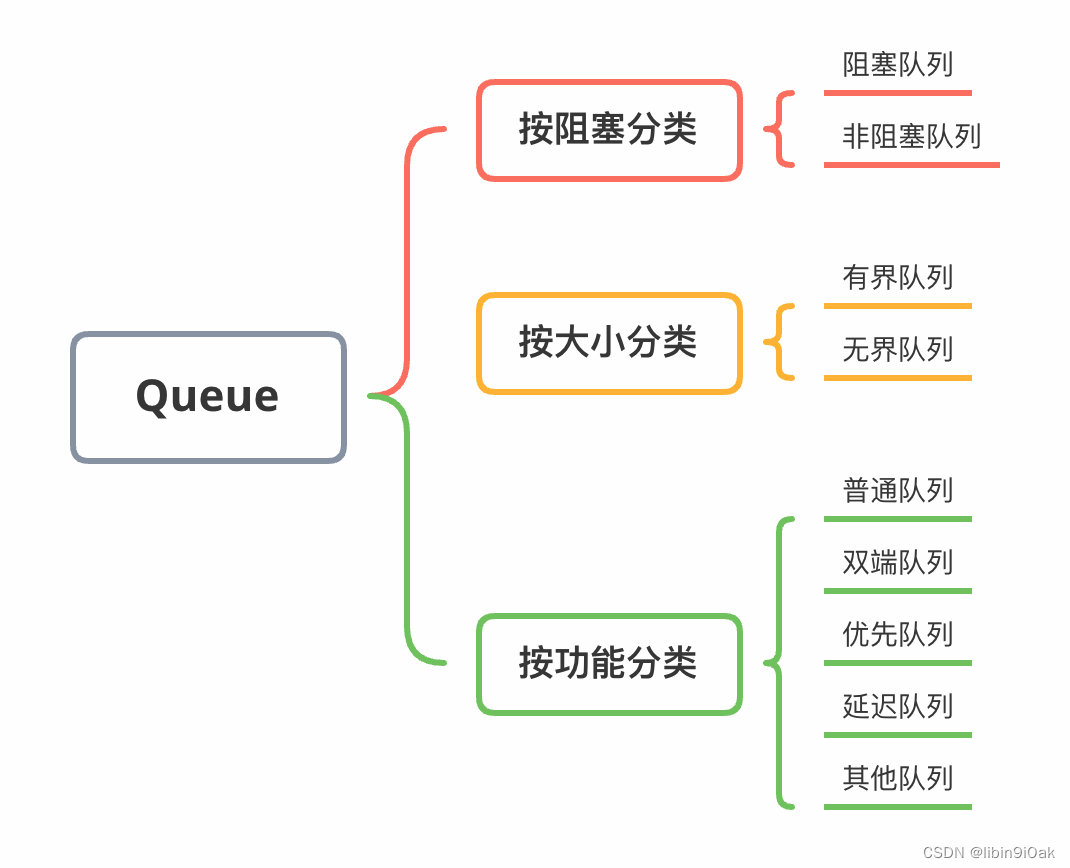
Java中常用的七种队列你了解多少?
文章目录Java中常用的七种队列你了解多少?ArrayBlockingQueue队列如何使用?添加元素到队列获取队列中的元素遍历队列LinkedBlockingQueue队列如何使用?1. 创建SynchronousQueue对象2. 添加元素到队列3. 获取队列中的元素4. 遍历队列SynchronousQueue队列…...
)
<Java获取时间日期工具类>常见八种场景(一)
一:自定义时间日期工具类常用的八种方式(整理): 0,getTimeSecondNum:时间日期转成秒数,常用于大小比较 1,getLastYearMonthLastDay:获取去年当月最后一天的时间日期 2,getLastYearM…...

接上一篇 对多个模型环形旋转进行优化 指定旋转位置
using System.Collections; using System.Collections.Generic; using UnityEngine; using DG.Tweening; public class ModelAnimal : MonoBehaviour { //记录鼠标滑动 public Vector2 lastPos;//鼠标上次位置 Vector2 currPos;//鼠标当前位置 Vector2 offset;//两次位置的偏移…...
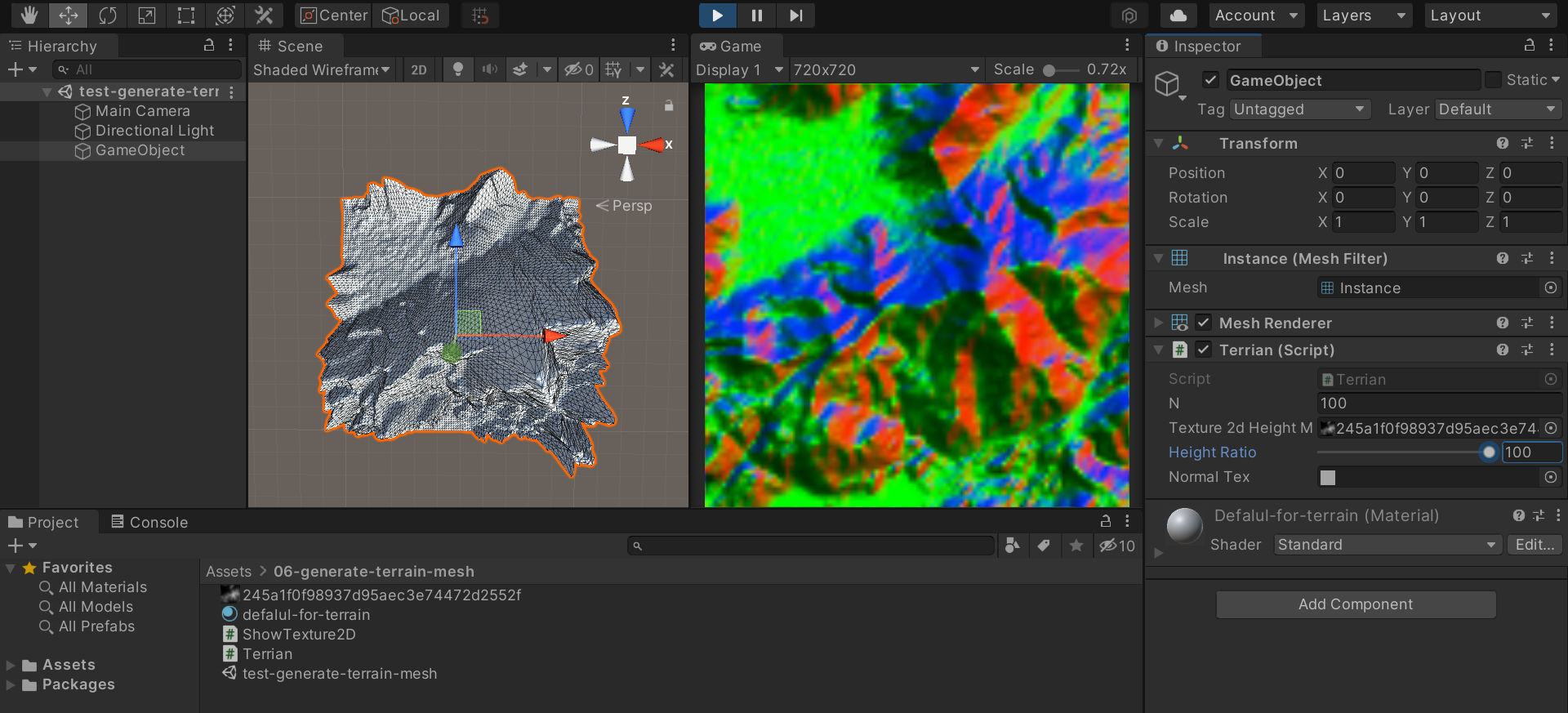
Unity中获取地形的法线
序之前,生成了地形图:(42条消息) 从灰度图到地形图_averagePerson的博客-CSDN博客那末,地形的法线贴图怎么获取?大概分为两个部分吧,先拿到法线数据,再画到纹理中去。关于法线计算Unity - Scripting API: M…...
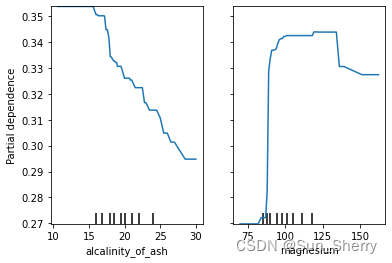
模型解释性:PFI、PDP、ICE等包的用法
本篇主要介绍几种其他较常用的模型解释性方法。 1. Permutation Feature Importance(PFI) 1.1 算法原理 置换特征重要性(Permutation Feature Importance)的概念很简单,其衡量特征重要性的方法如下:计算特征改变后模型预测误差的增加。如果打乱该特征的…...
)
spring常见面试题(2023最新)
目录前言1.spring是什么2.spring的设计核心是什么3.IOC和AOP面试题4.spring的优点和缺点5.spring中bean的作用域6.spring中bean的注入方式7.BeanFactory 和 ApplicationContext有什么区别?8.循环依赖的情况,怎么解决?9.spring中单例Bean是线程…...

华为OD机试题,用 Java 解【压缩报文还原】问题
最近更新的博客 华为OD机试题,用 Java 解【停车场车辆统计】问题华为OD机试题,用 Java 解【字符串变换最小字符串】问题华为OD机试题,用 Java 解【计算最大乘积】问题华为OD机试题,用 Java 解【DNA 序列】问题华为OD机试 - 组成最大数(Java) | 机试题算法思路 【2023】使…...
)
可口可乐AI印相私密工作流首次公开(含内部CMYK预置包、罐体反光建模提示词库与印刷出血校准表)
更多请点击: https://intelliparadigm.com 第一章:可口可乐AI印相私密工作流的起源与战略价值 可口可乐AI印相私密工作流并非源于通用大模型的简单套用,而是其全球数字创新实验室在2022年启动的“Project Chroma”中孵化出的端到端隐私增强…...
Pixelle-Video深度解析:AI全自动短视频引擎,一句话生成专业级短视频
https://github.com/AIDC-AI/Pixelle-Videohttps://github.com/AIDC-AI/Pixelle-Video 引言 刷到一条短视频,画面精美、配乐到位、解说流畅——你以为这至少得花两小时剪出来?其实可能只花了一句话的时间。今天我们要深入介绍的,就是GitHub…...

Linux桌面便签神器Sticky:3分钟告别灵感遗忘的终极解决方案
Linux桌面便签神器Sticky:3分钟告别灵感遗忘的终极解决方案 【免费下载链接】sticky A sticky notes app for the linux desktop 项目地址: https://gitcode.com/gh_mirrors/stic/sticky 你是否曾经有过这样的经历?在编码时突然想到一个绝妙的算法…...

从课堂到代码:三大数学可视化工具实战解析
1. 数学可视化工具的选择困境 第一次接触数学可视化工具时,我被各种选项搞得眼花缭乱。作为数学老师,我需要一个能让学生快速上手的工具;作为编程爱好者,我又希望它能支持更复杂的算法可视化。经过多年实践,我发现Desm…...

射频衰减系统设计:PIN二极管与电流源DAC应用
1. 射频衰减系统设计基础在无线通信系统中,精确控制信号强度是确保系统性能的关键要素。射频衰减器作为信号链中的"音量旋钮",其性能直接影响接收机动态范围、发射机功率控制精度等核心指标。传统机械式衰减器虽然精度高,但体积大、…...

从‘相似三角形’到3D点云:手把手用Python+OpenCV模拟激光三角法三维重建
从相似三角形到3D点云:PythonOpenCV激光三角法三维重建实战 激光三角测量法在工业检测、逆向工程等领域有着广泛应用。本文将带您从零开始,用Python和OpenCV实现一个完整的激光三角法三维重建系统。不同于简单的位移测量,我们将重点放在如何通…...

League Akari:3步打造你的英雄联盟智能游戏助手,告别繁琐操作
League Akari:3步打造你的英雄联盟智能游戏助手,告别繁琐操作 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit League A…...

NVIDIA Profile Inspector 5步优化指南:解锁显卡隐藏性能
NVIDIA Profile Inspector 5步优化指南:解锁显卡隐藏性能 【免费下载链接】nvidiaProfileInspector 项目地址: https://gitcode.com/gh_mirrors/nv/nvidiaProfileInspector NVIDIA Profile Inspector 是一款强大的显卡驱动配置工具,能够访问 NVI…...

精通SDR++软件定义无线电的3个实战秘籍:从入门到精通的系统指南
精通SDR软件定义无线电的3个实战秘籍:从入门到精通的系统指南 【免费下载链接】SDRPlusPlus Cross-Platform SDR Software 项目地址: https://gitcode.com/GitHub_Trending/sd/SDRPlusPlus SDR作为一款跨平台、开源的软件定义无线电应用,以其简洁…...

机械革命S2 Air/Code 01避坑指南:搞定WSL2和Docker,先搞定这3个驱动和BIOS
机械革命S2 Air/Code 01深度调优:WSL2与Docker稳定运行的三大核心策略 当机械革命S2 Air或Code 01遇上WSL2和Docker,不少技术爱好者会发现这条路并不平坦。蓝屏、WiFi断连、系统崩溃——这些看似随机的问题背后,其实隐藏着Windows系统版本、硬…...