多传感器融合定位十五-多传感器时空标定(综述)
多传感器融合定位十五-多传感器时空标定
- 1. 多传感器标定简介
- 1.1 标定内容及方法
- 1.2 讲解思路
- 2. 内参标定
- 2.1 雷达内参标定
- 2.2 IMU内参标定
- 2.3 编码器内参标定
- 2.4 相机内参标定
- 3. 外参标定
- 3.1 雷达和相机外参标定
- 3.2 多雷达外参标定
- 3.3 手眼标定
- 3.4 融合中标定
- 3.5 总结
- 4. 时间标定
- 4.1 离散时间
- 4.2 连续时间
- 4.3 总结
Reference:
- 深蓝学院-多传感器融合
- 多传感器融合定位理论基础
文章跳转:
- 多传感器融合定位一-3D激光里程计其一:ICP
- 多传感器融合定位二-3D激光里程计其二:NDT
- 多传感器融合定位三-3D激光里程计其三:点云畸变补偿
- 多传感器融合定位四-3D激光里程计其四:点云线面特征提取
- 多传感器融合定位五-点云地图构建及定位
- 多传感器融合定位六-惯性导航原理及误差分析
- 多传感器融合定位七-惯性导航解算及误差分析其一
- 多传感器融合定位八-惯性导航解算及误差分析其二
- 多传感器融合定位九-基于滤波的融合方法Ⅰ其一
- 多传感器融合定位十-基于滤波的融合方法Ⅰ其二
- 多传感器融合定位十一-基于滤波的融合方法Ⅱ
- 多传感器融合定位十二-基于图优化的建图方法其一
- 多传感器融合定位十三-基于图优化的建图方法其二
- 多传感器融合定位十四-基于图优化的定位方法
- 多传感器融合定位十五-多传感器时空标定(综述)
1. 多传感器标定简介
1.1 标定内容及方法

1.2 讲解思路
- 以思路讲解为主,并给出参考文献和开源代码,不做过多细节展开;
- 对已有方法做汇总分析,以求能在新的任务中掌握标定方案设计思路。
2. 内参标定
2.1 雷达内参标定

-
目的
由于安装原因,线束之间的夹角和设计不一致,会导致测量不准。 -
方法
多线束打在平面上,利用共面约束,求解夹角误差。 -
参考
论文:Calibration of a rotating multi-beam Lidar
论文:Improving the Intrinsic Calibration of a Velodyne LiDAR Sensor
论文:3D LIDAR–camera intrinsic and extrinsic calibration: Identifiability and analytical least-squares-based initialization
2.2 IMU内参标定
-
目的
由于加工原因,产生零偏、标度因数误差、安装误差。 -
方法
分立级标定:基于转台;
迭代优化标定:不需要转台。 -
参考
论文:A Robust and Easy to Implement Method for IMU Calibration without External Equipments
代码:https://github.com/Kyle-ak/imu_tk
2.3 编码器内参标定
-
目的
用编码器输出解算车的位移增量和角度增量,需已知轮子半径和两轮轴距。 -
方法
以车中心雷达/组合导航做观测,以此为真值,反推模型参数。 -
参考
论文:Simultaneous Calibration of Odometry and Sensor Parameters for Mobile Robots
2.4 相机内参标定

-
目的
相机与真实空间建立关联,需已知其内参。 -
方法
张正友经典方法
3. 外参标定
3.1 雷达和相机外参标定

-
目的
解算雷达和相机之间的相对旋转和平移。 -
方法
PnP是主流,视觉提取特征点,雷达提取边缘,建立几何约束。 -
参考
论文: LiDAR-Camera Calibration using 3D-3D Point correspondences
代码: https://github.com/ankitdhall/lidar_camera_calibration
论文: Automatic Extrinsic Calibration for Lidar-Stereo Vehicle Sensor Setups
代码: https://github.com/beltransen/velo2cam_calibration
3.2 多雷达外参标定

-
目的
多雷达是常见方案,使用时将点云直接拼接,但前提是已知雷达之间的外参(相对旋转和平移)。 -
方法
基于特征(共面)建立几何约束,从而优化外参。 -
参考
论文:A Novel Dual-Lidar Calibration Algorithm Using Planar Surfaces
代码:https://github.com/ram-lab/lidar_appearance_calibration
3.3 手眼标定

-
目的
手眼标定适用于所有无共视,但是能输出位姿的传感器之间标定。包括:
• 无共视的相机、雷达,或雷达与雷达之间;
• 相机与IMU,或雷达与IMU之间(前提是IMU要足够好,或直接使用组合导航)。 -
方法
均基于公式 AX=XBAX=XBAX=XB -
参考
论文:LiDAR and Camera Calibration using Motion Estimated by Sensor Fusion Odometry
代码:https://github.com/ethz-asl/lidar_align
3.4 融合中标定
-
目的
• 脱离标靶,实现在线标定;
• 某些器件无法提供准确位姿(如低精度IMU),不能手眼标定。 -
方法
在融合模型中,增加外参作为待估参数。 -
参考
众多vio/lio系统,如vins、 lio-mapping、 M-Loam 等
3.5 总结
-
这些方法中,推荐优先级从高到低为:
a. 基于共视的标定
b. 融合中标定
c. 手眼标定 -
建议
应在良好环境下标定,尽量避免不分场景的在线标定。良好环境指观测数据优良的场景,例如:
a. GNSS 信号良好;
b. 点云面特征丰富,没有特征退化;
c. 动态物体较少
4. 时间标定
4.1 离散时间
-
目的
在原有离散时间融合模式下,简单地解决时间同步问题。

-
方案 I
 简单但巧妙的策略: IMU时间保持不变,图像上特征点基于匀速运动模型修改位置。
简单但巧妙的策略: IMU时间保持不变,图像上特征点基于匀速运动模型修改位置。
与不考虑时间误差时相比,架构不变,使用极小的改动,实现了期望的效果。
elk=zlk−π(RckwT(Pl−pckw))zlk=[ulkvlk]T.↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓elk=zlk(td)−π(RckwT(Pl−pckw))zlk(td)=[ulkvlk]T+tdVlk.\begin{array}{l} \mathbf{e}_l^k=\mathbf{z}_l^k-\pi\left(\mathbf{R}_{c_k}^{w^T}\left(\mathbf{P}_l-\mathbf{p}_{c_k}^w\right)\right) \\ \mathbf{z}_l^k=\left[\begin{array}{ll} u_l^k & v_l^k \end{array}\right]^T . \\ \downarrow\downarrow\downarrow\downarrow\downarrow\downarrow\downarrow\downarrow\downarrow\downarrow\downarrow\downarrow\downarrow\downarrow\downarrow \\ \mathbf{e}_l^k=\mathbf{z}_l^k\left(t_d\right)-\pi\left(\mathbf{R}_{c_k}^{w^T}\left(\mathbf{P}_l-\mathbf{p}_{c_k}^w\right)\right) \\ \mathbf{z}_l^k\left(t_d\right)=\left[\begin{array}{ll} u_l^k & v_l^k \end{array}\right]^T+t_d \mathbf{V}_l^k . \end{array} elk=zlk−π(RckwT(Pl−pckw))zlk=[ulkvlk]T.↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓elk=zlk(td)−π(RckwT(Pl−pckw))zlk(td)=[ulkvlk]T+tdVlk.参考文献:Online Temporal Calibration for Monocular Visual-Inertial Systems -
方案 II
在滤波中计算相机位姿时,直接按时间差对积分区间进行调整。
状态量:x=[xITICq‾TCpITtdc1T⋯cMT]T\mathbf{x}=\left[\begin{array}{lllllll} \mathbf{x}_I^T & { }_I^C \overline{\mathbf{q}}^T & { }^C \mathbf{p}_I^T & t_d & \mathbf{c}_1^T & \cdots & \mathbf{c}_M^T \end{array}\right]^Tx=[xITICqTCpITtdc1T⋯cMT]T
相机位姿估计:c^new=[GCq(t+td)^GpC(t+td)^]=[ICq^⊗GIq^(t+t^d)Gp^I(t+t^d)+GIR^(t+t^d)TIp^C]\hat{\mathbf{c}}_{n e w}=\left[\begin{array}{c}{ }_G^C \widehat{\mathbf{q}\left(t+t_d\right)} \\ { }^G \widehat{\mathbf{p}_C\left(t+t_d\right)}\end{array}\right]=\left[\begin{array}{c}{ }_I^C \hat{\mathbf{q}} \otimes{ }_G^I \hat{\mathbf{q}}\left(t+\hat{t}_d\right) \\ { }^G \hat{\mathbf{p}}_I\left(t+\hat{t}_d\right)+{ }_G^I \hat{\mathbf{R}}\left(t+\hat{t}_d\right)^T{ }^I \hat{\mathbf{p}}_C\end{array}\right]c^new=[GCq(t+td)GpC(t+td)]=[ICq^⊗GIq^(t+t^d)Gp^I(t+t^d)+GIR^(t+t^d)TIp^C]
参考文献:Online Temporal Calibration for Camera-IMU Systems: Theory and Algorithms
4.2 连续时间
- 原因
预积分中把时间差作为待估状态量,对时间差进行建模,如下:
Δpmi=∑k=κi−1(ΔvmkΔtk+ΔRmk2f(tk−δtm−bfm)Δtk2)Δvmi=∑k=κi−1ΔRmkf(tk−δtm)−bfm)ΔtkΔRmi=∏k=κi=1Exp(ω(tk−δtm)−bωm)Δtk),\begin{array}{l} \Delta \mathbf{p}_m^i=\sum_{k=\kappa}^{i-1}\left(\Delta \mathbf{v}_m^k \Delta t_k+\frac{\Delta \mathbf{R}_m^k}{2} \operatorname{f}\left(t_k-\delta_t^m-\mathbf{b}_f^m\right) \Delta t_k^2\right) \\ \left.\Delta \mathbf{v}_m^i=\sum_{k=\kappa}^{i-1} \Delta \mathbf{R}_m^k \mathbf{f}\left(t_k-\delta_t^m\right)-\mathbf{b}_f^m\right) \Delta t_k \\ \left.\Delta \mathbf{R}_m^i=\prod_{k=\kappa}^{i=1} \operatorname{Exp}\left(\omega\left(t_k-\delta_t^m\right)-\mathbf{b}_\omega^m\right) \Delta t_k\right), \end{array} Δpmi=∑k=κi−1(ΔvmkΔtk+2ΔRmkf(tk−δtm−bfm)Δtk2)Δvmi=∑k=κi−1ΔRmkf(tk−δtm)−bfm)ΔtkΔRmi=∏k=κi=1Exp(ω(tk−δtm)−bωm)Δtk),由于要对时间差求雅可比,因此插值函数必须可导,雅可比如下:
ΔRm(bω,δt)i≈ΔRm(bˉωm,δˉδm)iExp(∂ΔRmi∂bωb^ωm+∂ΔRmi∂δtδ^tm).Δvm(bf,bω,δt)i≈ΔΔvm(bˉfm,bˉmm,δˉtm)i+∂Δvmi∂bfb^fm+∂Δvmi∂bωb^ωm+∂Δvmi∂δtδ^tmΔpm(bf,bω,,δt)i≈Δpm(bfm‾,bˉmm,δˉtm)i+∂Δpmm∂bfb^fm+∂Δpmi∂bωb^ωm+∂Δpmi∂δtδ^tm\begin{array}{l} \Delta \mathbf{R}_{m\left(\mathbf{b}_\omega, \delta_t\right)}^i \approx \Delta \mathbf{R}_{m\left(\bar{b}_\omega^m, \bar{\delta}_\delta^m\right)}^i \operatorname{Exp}\left(\frac{\partial \Delta \mathbf{R}_m^i}{\partial \mathbf{b}_\omega} \hat{\mathbf{b}}_\omega^m+\frac{\partial \Delta \mathbf{R}_m^i}{\partial \delta_t} \hat{\delta}_t^m\right). \\ \Delta \mathbf{v}_{m\left(\mathbf{b}_f, \mathbf{b}_\omega, \delta_t\right)}^i \approx \Delta \Delta \mathbf{v}_{m\left(\bar{b}_f^m, \bar{b}_m^m, \bar{\delta}_t^m\right)}^i+\frac{\partial \Delta \mathbf{v}_m^i}{\partial \mathbf{b}_f} \hat{\mathbf{b}}_f^m +\frac{\partial \Delta \mathbf{v}_m^i}{\partial \mathbf{b}_\omega} \hat{\mathbf{b}}_\omega^m+\frac{\partial \Delta \mathbf{v}_m^i}{\partial \delta_t} \hat{\delta}_t^m \\ \Delta \mathbf{p}_{m\left(\mathbf{b}_f, \mathbf{b}_{\omega,}, \delta_t\right)}^i \approx \Delta \mathbf{p}_{m\left(\overline{\mathbf{b}_f^m}, \bar{b}_m^m, \bar{\delta}_t^m\right)}^i+\frac{\partial \Delta \mathbf{p}_m^m}{\partial \mathbf{b}_f} \hat{\mathbf{b}}_f^m +\frac{\partial \Delta \mathbf{p}_m^i}{\partial \mathbf{b}_\omega} \hat{b}_\omega^m+\frac{\partial \Delta \mathbf{p}_m^i}{\partial \delta_t} \hat{\delta}_t^m \\ \end{array} ΔRm(bω,δt)i≈ΔRm(bˉωm,δˉδm)iExp(∂bω∂ΔRmib^ωm+∂δt∂ΔRmiδ^tm).Δvm(bf,bω,δt)i≈ΔΔvm(bˉfm,bˉmm,δˉtm)i+∂bf∂Δvmib^fm+∂bω∂Δvmib^ωm+∂δt∂Δvmiδ^tmΔpm(bf,bω,,δt)i≈Δpm(bfm,bˉmm,δˉtm)i+∂bf∂Δpmmb^fm+∂bω∂Δpmib^ωm+∂δt∂Δpmiδ^tm参考文献:3D Lidar-IMU Calibration based on Upsampled Preintegrated Measurements for Motion Distortion Correction - 方法
把输入建立为连续时间函数,从而可以在任意时间求导。 - 参考
a. kalibr 系列
论文:Continuous-Time Batch Estimation using Temporal Basis Functions
论文:Unified Temporal and Spatial Calibration for Multi-Sensor Systems
论文:Extending kalibr Calibrating the Extrinsics of Multiple IMUs and of Individual Axes
代码:https://github.com/ethz-asl/kalibr
b. 其他
论文:Targetless Calibration of LiDAR-IMU System Based on Continuous-time Batch Estimation
代码:https://github.com/APRIL-ZJU/lidar_IMU_calib
4.3 总结
- 时间差估计,在某些情况下不得已而为之,实际中应尽量创造条件实现硬同步;
- 不得不估计时,也应尽量在良好环境下估计。
相关文章:
多传感器融合定位十五-多传感器时空标定(综述)
多传感器融合定位十五-多传感器时空标定1. 多传感器标定简介1.1 标定内容及方法1.2 讲解思路2. 内参标定2.1 雷达内参标定2.2 IMU内参标定2.3 编码器内参标定2.4 相机内参标定3. 外参标定3.1 雷达和相机外参标定3.2 多雷达外参标定3.3 手眼标定3.4 融合中标定3.5 总结4. 时间标…...
开发微服务电商项目演示(三)
一,nginx动静分离第1步:通过SwitchHosts新增二级域名:images.zmall.com第2步:将本次项目的易买网所有静态资源js/css/images复制到nginx中的html目录下第3步:在nginx的核心配置文件nginx.conf中新增二级域名images.zma…...

C/C++排序算法(二) —— 选择排序和堆排序
文章目录前言1. 直接选择排序🍑 基本思想🍑 具体步骤🍑 具体步骤🍑 动图演示🍑 代码实现🍑 代码升级🍑 特性总结2. 堆排序🍑 向下调整算法🍑 任意树调整为堆的思想&#…...
爬虫笔记之——selenium安装与使用(1)
爬虫笔记之——selenium安装与使用(1)一、安装环境1、下载Chrome浏览器驱动(1)查看Chrome版本(2)下载相匹配的Chrome驱动程序地址:https://chromedriver.storage.googleapis.com/index.html2、学…...
STC15单片机软串口的使用
STC15软串口的使用📖在没有使用定时器资源的情况下,根据波特率位传输时间,利用STC-ISP工具自动计算出位延时函数。 ✨在官方所提供的库函数中位传输时间函数,仅适用于使用波特率为:9600的串口数据传输: void BitTime(…...
Ansible的脚本------playbook剧本
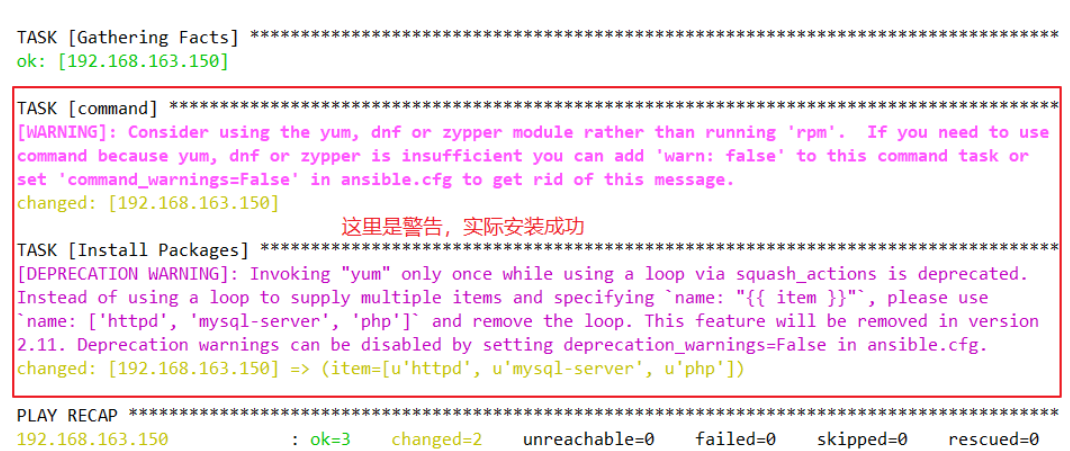
一、剧本的前置知识点1、主机清单ansible默认的主机清单是/etc/ansible/hosts文件主机清单可以手动设置,也可以通过Dynamic Inventory动态生成一般主机名使用FQDNvi /etc/ansible/hosts [webserver] #使用方括号设置组名 www1.example.org #定…...

实验5-计算中值及分治技术
目录 1.寻找中位数(利用快速排序来寻找中位数) 2.分治方法求数组的和 3.合并排序...

dbeaver从excel导入数据笔记
场景 有excel的数据,需要做到数据库里。 方案一: 开发代码来实现。缺点是需要开发成本。 方案二: 数据库导入工具导入。不用开发,相对快速一些。 这里说下数据库工具导入。 操作过程 1、拿到excel数据文件,根据标题…...

PyTorch学习笔记:nn.MarginRankingLoss——排序损失
PyTorch学习笔记:nn.MarginRankingLoss——排序损失 torch.nn.MarginRankingLoss(margin0.0, size_averageNone, reduceNone, reductionmean)功能:创建一个排序损失函数,用于衡量输入x1x_1x1与x2x_2x2之间的排序损失(Ranking Loss)&…...

【JavaScript】34_Date对象 ,日期的格式化
8、Date Date 在JS中所有的和时间相关的数据都由Date对象来表示 对象的方法: getFullYear() 获取4位年份 getMonth() 返当前日期的月份(0-11) getDate() 返回当前是几日 getDay() 返回当前日期是周几(0-6) 0表示周日…...
计算机视觉 对比学习13篇经典论文、解读、代码
为了快速对 机器视觉中的对比学习有一个快速了解,或者后续复习,此处收录了 13篇经典论文、一些讲解地较好的博客和相应的Github代码,用不同颜色标记。 对比学习 13篇经典论文 论文代码和博客http://www.webhub123.com/#/home/detail?p…...

MySQL 选择数据库
在你连接到 MySQL 数据库后,可能有多个可以操作的数据库,所以你需要选择你要操作的数据库。 在 MySQL 中就有很多系统自带的数据库,那么在操作数据库之前就必须要确定是哪一个数据库。 在 MySQL 中,USE 语句用来完成一个数据库到…...

雅思经验(9)
写作:关于趋势的上升和下降在小作文中,真的是非常常见的,所以还是要积累一下。下面给出了很多词,但是在雅思写作中并不是词越丰富,分数就越高的。雅思写作强调的是准确性:在合适的地方用合适的词和句法。不…...
java面试题(二十)中间件redis
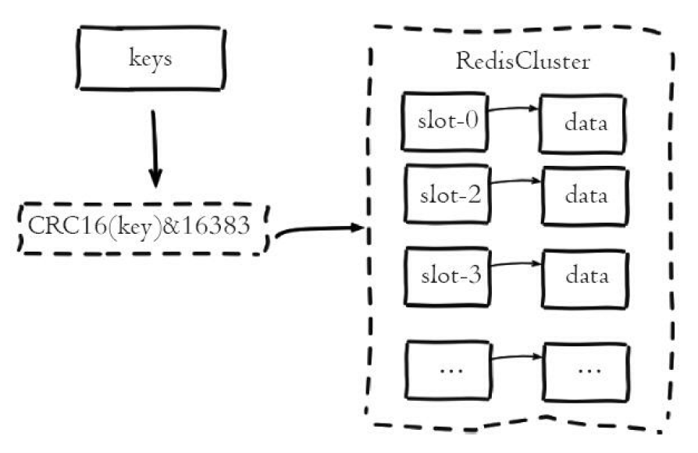
1.1 Redis可以用来做什么? 参考答案 Redis最常用来做缓存,是实现分布式缓存的首先中间件;Redis可以作为数据库,实现诸如点赞、关注、排行等对性能要求极高的互联网需求;Redis可以作为计算工具,能用很小的…...
JavaWEB必知必会-Servlet
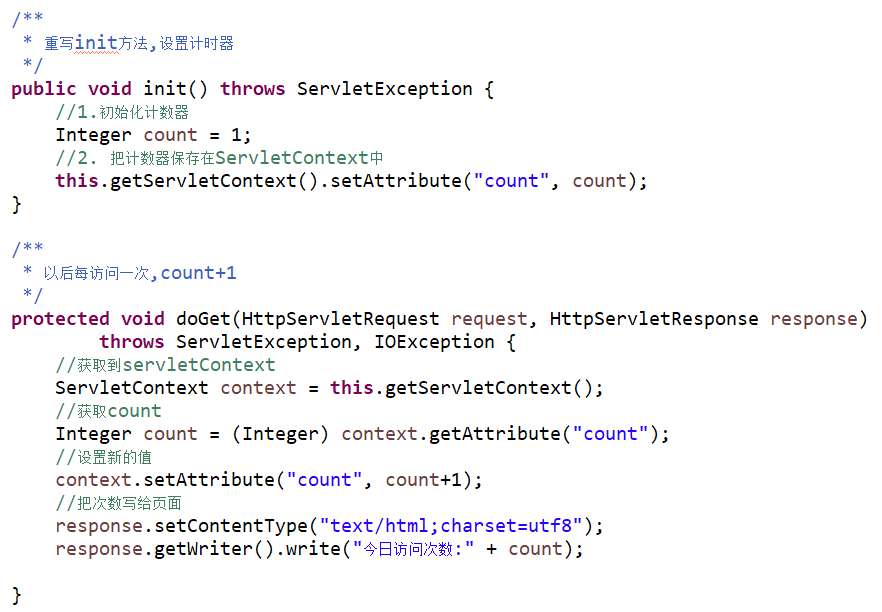
目录 Servlet简介Servlet快速入门Servlet配置详解ServletContext 1 Servlet简介 Servlet 运行在服务端的Java小程序,是sun公司提供一套规范(接口),用来处理客户端请求、响应给浏览器的动态资源。但servlet的实质就是java代码&a…...
)
oralce查找返回不同的值,寻找不同的表(原创)
查找返回不同的值,寻找不同的表 select case a_id when 1 then (select b_id|| ||b_desc from b where b.b_ida.a_id) else (select e_id || ||e_desc from e where e.e_ida.a_id) end from a; 以上方法的缺陷是单表,判断。今天来了个挑战&#…...
Python-第四天 Python循环语句
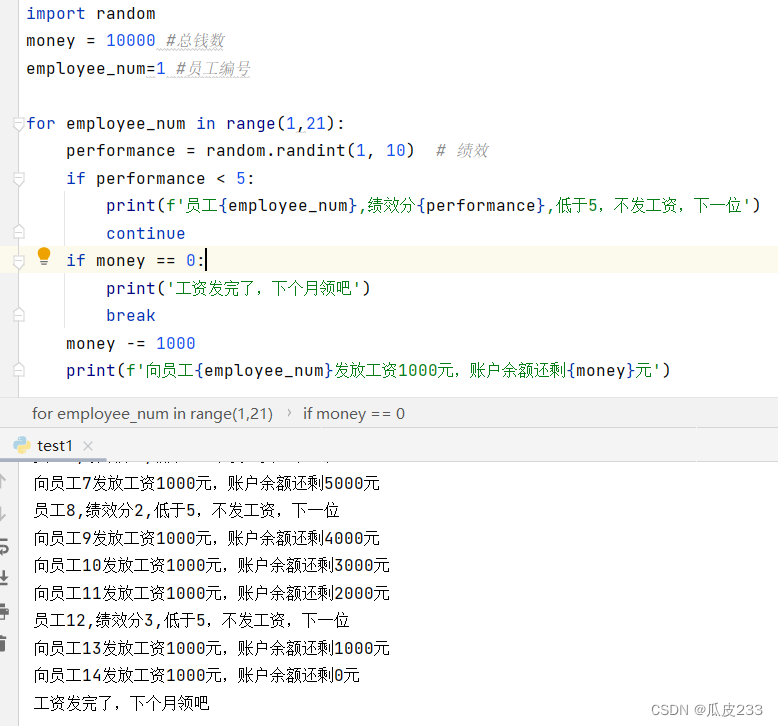
Python-第四天 Python循环语句一、while循环1.while循环的基础语法2.while循环的基础案例3.while循环的嵌套应用4.while循环的嵌套案例二、for循环1.for循环的基础语法1.1基础语法1.2 range语句2.for循环的嵌套应用三、循环中断 : break和continue1.continue2.break四、 综合案…...
spring中bean的生命周期(简单5步)
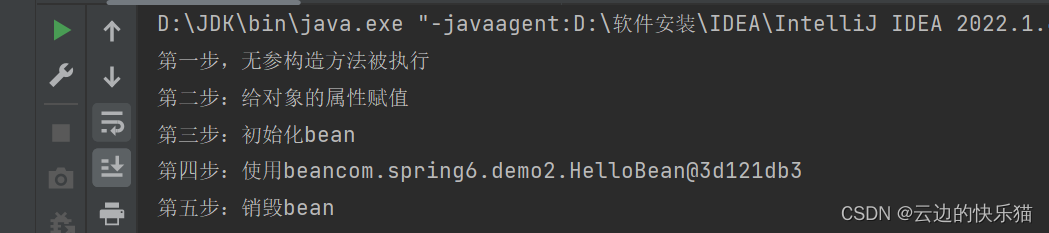
目录 一、概念 1.生命是bean的生命周期? 2.知道bean生命周期的意义? 3.bean的生命周期按照粗略的五步 二、例子讲解 一、概念 1.生命是bean的生命周期? 答:spring其实就是管理bean对象的工厂,它负责对象的创建&…...
10 个最难理解的 Python 概念
文章目录技术提升面向对象编程 (OOP)装饰器生成器多线程异常处理正则表达式异步/等待函数式编程元编程网络编程大家好,与其他编程语言相比,Python 是一门相对简单的编程语言,如果你想真正学透这门语言,其实可能并不容易。 今天我…...
【linux】线程概念
概念 什么是线程 在一个程序里的一个执行路线就叫做线程(thread)。更准确的定义是:线程是“一个进程内部的控制序列” 一切进程至少都有一个执行线程,线程在进程内部运行,本质是在进程地址空间内运行 在Linux系统中&a…...

4个步骤让普通用户实现黑苹果EFI自动生成:OpCore Simplify智能工具全解析
4个步骤让普通用户实现黑苹果EFI自动生成:OpCore Simplify智能工具全解析 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 如何用智能工具解…...

新手必看!Quartus II 10.0 + DE2-115开发板从安装到点亮LED的完整避坑指南
Quartus II 10.0 DE2-115开发板从安装到点亮LED的完整避坑指南 第一次接触FPGA开发时,我盯着DE2-115开发板上密密麻麻的接口和Quartus II复杂的界面,完全不知道从何下手。直到经历了无数次驱动安装失败、管脚分配错误和编译报错后,才终于让第…...

智能客服体验问题诊断:从技术架构到优化实践
智能客服体验问题诊断:从技术架构到优化实践 智能客服作为企业与用户交互的重要窗口,其体验好坏直接影响用户满意度和业务转化率。一个响应迟钝、答非所问的客服机器人,不仅无法解决问题,反而会加剧用户的不满。本文将从一个开发者…...
Map 接口(HashMap、LinkedHashMap、TreeMap))
JAVA重点基础、进阶知识及易错点总结(10)Map 接口(HashMap、LinkedHashMap、TreeMap)
🚀 Java 巩固进阶 第10天 主题:Map 接口深度解析 —— 键值对的高效艺术📅 进度概览:掌握 Java 中最灵活的数据结构。 💡 核心价值: 动态数据承载:SpringBoot 中接收前端动态参数 (Map<Stri…...

Claude Code 速查表
其中的:键盘快捷键常规控制Ctrl C:取消输入 / 生成Ctrl D:退出会话Ctrl L:清屏Ctrl O:切换详细输出Ctrl R:反向搜索历史Ctrl G:在编辑器中打开提示Ctrl B:后台运行任务Ctrl …...
)
冥想第一千八百三十三天(1833)
1.昨天晚上电动车刹车终于修好了,刹车更紧了,今天的天气很热了,明天就还薄款的运动衣。 2.感谢父母,感谢朋友,感谢家人,感谢不断进步的自己。...

生物信息学避坑指南:你的热图聚类总乱?可能是数据标准化和样品注释没做对
生物信息学避坑指南:热图聚类混乱的根源与系统性解决方案 热图(Heatmap)作为生物信息学中最常用的数据可视化工具之一,广泛应用于基因表达分析、代谢组学、微生物组学等领域。然而,许多初学者在使用热图进行样品聚类时…...

别再傻傻分不清!STM32定时器里Prescaler和ClockDivision到底谁管心跳谁管滤波?
STM32定时器双频分频机制深度解析:从心跳节拍到信号滤波 第一次接触STM32定时器配置时,看到Prescaler和ClockDivision这两个参数,很多开发者都会产生疑惑——它们看起来都是在做"分频"这件事,为什么需要两个参数&#x…...

SleeperX:Mac电源管理的智能守护者,让每一次工作都不被打断
SleeperX:Mac电源管理的智能守护者,让每一次工作都不被打断 【免费下载链接】SleeperX MacBook prevent idle/lid sleep! Hackintosh sleep on low battery capacity. 项目地址: https://gitcode.com/gh_mirrors/sl/SleeperX 您是否经历过这样的时…...

答辩 PPT「懒人救星」实测:paperxie AI 一键把论文转成答辩稿,再也不用熬夜排版
paperxie-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AIPPThttps://www.paperxie.cn/ppt/createhttps://www.paperxie.cn/ppt/create paperxie-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AIPPT 谁本科答辩没栽在 PPT 上?万字论文…...