【XTDrone Ubuntu20.04】XTDrone+ Ubuntu20.04 + PX4安装
XTDrone仿真平台配置
文章目录
- XTDrone仿真平台配置
- 依赖安装
- ROS一键安装
- Marvos安装
- PX4 安装
- 安装QTGroundControl
- XTDrone下载安装
环境:
VMWare 16.0
Ubuntu 22.04 (因为没人配过)Ubuntu 20.04
参考文章:
-
仿真平台基础配置 (yuque.com)
-
Ubuntu20.04搭建PX4仿真环境及XTDrone开发平台(最详细最明白)_ubuntu安装px4_哒哒哒,啥也不会的博客-CSDN博客
安装过程:
简单地说,XTDrone安装包括几个部分:ROS安装、Gazebo安装、marvos安装和PX4 安装,XTDrone下载和配置。
依赖安装
首先安装一个aptitude以解决出现的依赖问题
依赖问题的报错形式:
有一些软件包无法被安装。如果您用的是 unstable 发行版,这也许是
因为系统无法达到您要求的状态造成的。该版本中可能会有一些您需要的软件
包尚未被创建或是它们已被从新到(Incoming)目录移出。
下列信息可能会对解决问题有所帮助:
下列软件包有未满足的依赖关系:
fcitx : 依赖: fcitx-data 但是它将不会被安装
E: 无法修正错误,因为您要求某些软件包保持现状,就是它们破坏了软件包间的依赖关系。
使用sudo apt install aptitude 安装aptitude,在一定程度上能解决依赖问题
先从语雀下载压缩包PX4_Firmware,并将该zip压缩包放置到Ubuntu主目录下,使用unzip命令解压,没用unzip命令工具,使用sudo apt install unzip或sudo pip install unzip,然后解压后,将其命名为PX4_Firmware,使用cd PX4_Firmware/Tools/setup,其中有一个requements.txt文件:
argcomplete
argparse>=1.2
cerberus
coverage
empy>=3.3
future
jinja2>=2.8
jsonschema
kconfiglib
lxml
matplotlib>=3.0.*
numpy>=1.13
nunavut>=1.1.0
packaging
pandas>=0.21
pkgconfig
psutil
pygments
wheel>=0.31.1
pymavlink
pyros-genmsg
pyserial
pyulog>=0.5.0
pyyaml
requests
setuptools>=39.2.0
six>=1.12.0
toml>=0.9
这是官当给出的PX4所需依赖。
在PX4_Firmware/Tools/setup目录下执行命令:
bash ubuntu.sh --no-sim-tools
不加参数 --no-sim-tools,就会自动安装ubuntu版本对应的gazebo及gazebo-dev,和javsim等仿真依赖
sudo apt install ninja-build exiftool ninja-build protobuf-compiler libeigen3-dev genromfs xmlstarlet libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev python-pip python3-pip gawk
pip2 install pandas jinja2 pyserial cerberus pyulog==0.7.0 numpy toml pyquaternion empy pyyaml
pip3 install packaging numpy empy toml pyyaml jinja2 pyargparse
记录
语雀文档中提到的一个错误:
Collecting pandasUsing cached https://files.pythonhosted.org/packages/64/f1/8fdbd74edfc31625d597717be8c155c6226fc72a7c954c52583ab81a8614/pandas-1.1.2.tar.gzComplete output from command python setup.py egg_info:Traceback (most recent call last):File "<string>", line 1, in <module>File "/tmp/pip-build-qtvsjq8t/pandas/setup.py", line 349f"{extension}-source file '{sourcefile}' not found.\n"^SyntaxError: invalid syntax----------------------------------------
Command "python setup.py egg_info" failed with error code 1 in /tmp/pip-build-qtvsjq8t/pandas/
如果出现该错误,可以先更新setuptools 和 pip。(我没出现过)
更新setuptools命令:
pip install --upgrade setuptools
#若未报错不需要输入这两行命令
python -m pip install --upgrade pip
放置一个清华源安装地址:
https://pypi.tuna.tsinghua.edu.cn/simple
如果报错:网络连接不上,或者下载一半就不下了,然后报错的情况,就在上面的命令后面写上:
pip2 install pandas jinja2 pyserial cerberus pyulog==0.7.0 numpy toml pyquaternion empy pyyaml -i https://pypi.tuna.tsinghua.edu.cn/simple
可能的报错如下:
ERROR: Could not install packages due to an EnvironmentError: HTTPSConnectionPool(host='files.pythonhosted.org', port=443): Max retries exceeded with url: /packages/ec/1a/610693ac4ee14fcdf2d9bf3c493370e4f2ef7ae2e19217d7a237ff42367d/packaging-23.2-py3-none-any.whl (Caused by NewConnectionError('<urllib3.connection.VerifiedHTTPSConnection object at 0x7fd53ca02c10>: Failed to establish a new connection: [Errno 101] Network is unreachable'))ROS一键安装
鱼香肉丝开发的ubuntu一键安装挺不错的,避免了自己安装的很多麻烦,包括编译上的麻烦,换源等诸多问题。
wget http://fishros.com/install -O fishros && . fishros
Ubuntu 20.04是最后一个支持ROS1的,对应安装ROS1的Noetic,(Ubuntu 22.04只能安装ROS2,ROS2都不是很熟,我安装试了一下,不太会用,所以又用20.04了)
安装时间会比较漫长:安装结束后,使用roscore命令启动ros(ROS2中不再这样启动),出现一大段信息,包括如下信息,即安装成功。
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.started roslaunch server http://ubuntu:37819/
ros_comm version 1.16.0SUMMARY
========PARAMETERS* /rosdistro: noetic* /rosversion: 1.16.0NODESauto-starting new master
process[master]: started with pid [34913]
ROS_MASTER_URI=http://ubuntu:11311/setting /run_id to 28b04b30-835b-11ee-87ca-e5b945730283
process[rosout-1]: started with pid [34924]
started core service [/rosout]文档里有推荐安装rosdep,
rosdep是ros的依赖项管理工具,在安装完ros之后建议安装此工具,但是在rosdep init和 rosdep update时国外的网站实在令人头疼。所以使用rosdepc
所以安装一下:
sudo pip install rosdepc
rosdepc需要进行初始化和更新
sudo rosdepc init
rosdepc update
如果之前没有catkin_ws,则需要新建工作空间,之后除去PX4仿真环境启动外,其余ROS相关工程在此工作空间下管理。
文档中推荐做法,估计是为了集中管理?
mkdir -p ~/catkin_ws/src
mkdir -p ~/catkin_ws/scripts
cd catkin_ws && catkin init # 使用catkin_make话,则为cd catkin_ws/src && catkin_init_workspace
catkin build # 使用catkin_make话,则为 cd .. && catkin_make
gedit ~/.bashrc
在下面写入:source ~/catkin_ws/devel/setup.bash #先写好source路径
关闭文件,在终端执行
source ~/.bashrc
catkin build需要先装catkin-tools(sudo apt install python3-catkin-tools),安装好Ubutu系统应该会有这个命令工具。
文档里说要卸载之前的Gazebo,CSDN博客里给出以下原因
XTDrone一般用gazebo9进行仿真,而在安装ros noetic时会自动安装gazebo11以及对应的gazebo-ros插件,这里我们需要卸载,然后安装gazebo9以及肖老师修改过的gazebo-ros插件。
感觉也可以用gazebo11来进行仿真,如果比较有时间的话,可以试一试。
感觉Gazebo 11也不是不行,文档里给出可以
- 选用Alternative installation: step-by-step的安装方式
- 如果安装有依赖问题,可以使用sudo aptitude install gazebo11,选择合理的依赖解决办法(别把ROS删了)
- 按步骤装完Gazebo后,升级所有的包 sudo apt upgrade,这样能保证gazebo所有依赖版本一致
卸载Gazebo
sudo apt-get remove gazebo*
sudo apt-get remove libgazebo*
sudo apt-get remove ros-noetic-gazebo* #kinetic melodic对应修改
安装Gazebo
a、添加软件仓库
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
b、获取密钥
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
c、更新软件源
sudo apt-get update
d、安装Gazebo 9
sudo apt-get install gazebo9
sudo apt-get install libgazebo9-dev #一定要记得这个
安装Gazebo 11
sudo apt-get install gazebo11
sudo apt-get install libgazebo11-dev
插件修改的重新编译
安装依赖:
sudo apt-get install ros-noetic-moveit-msgs ros-noetic-object-recognition-msgs ros-noetic-octomap-msgs ros-noetic-camera-info-manager ros-noetic-control-toolbox ros-noetic-polled-camera ros-noetic-controller-manager ros-noetic-transmission-interface ros-noetic-joint-limits-interface
然后克隆并编译Gazebo的插件gazebo_ros_pkgs,放在~/catkin_ws/src下(如果编译时还缺其他的依赖,同上方法安装)
cd ~/catkin_ws/src
git clone https://github.com/ros-simulation/gazebo_ros_pkgs.git
cd ~/catkin_ws
catkin build
上面需要使用git命令工具,如果没安装过
sudo apt install git
catkin build后的结果,成功的情况是不会有Error的,(红色的Error看得人心惊肉跳)
-----------------------------------------------------------------------
Profile: default
Extending: [env] /opt/ros/noetic:/home/sunx/catkin_ws/devel
Workspace: /home/sunx/catkin_ws
-----------------------------------------------------------------------
Build Space: [exists] /home/sunx/catkin_ws/build
Devel Space: [exists] /home/sunx/catkin_ws/devel
Install Space: [unused] /home/sunx/catkin_ws/install
Log Space: [exists] /home/sunx/catkin_ws/logs
Source Space: [exists] /home/sunx/catkin_ws/src
DESTDIR: [unused] None
-----------------------------------------------------------------------
Devel Space Layout: linked
Install Space Layout: None
-----------------------------------------------------------------------
Additional CMake Args: None
Additional Make Args: None
Additional catkin Make Args: None
Internal Make Job Server: True
Cache Job Environments: False
-----------------------------------------------------------------------
Buildlisted Packages: None
Skiplisted Packages: None
-----------------------------------------------------------------------
Workspace configuration appears valid.
-----------------------------------------------------------------------
[build] Found 6 packages in 0.0 seconds.
[build] Updating package table.
Starting >>> gazebo_dev
Starting >>> gazebo_msgs
Finished <<< gazebo_dev [ 1.2 seconds ]
Finished <<< gazebo_msgs [ 9.4 seconds ]
Starting >>> gazebo_ros
Finished <<< gazebo_ros [ 20.6 seconds ]
Starting >>> gazebo_plugins
Starting >>> gazebo_ros_control
Finished <<< gazebo_ros_control [ 25.8 seconds ]
Finished <<< gazebo_plugins [ 3 minutes and 41.5 seconds ]
Starting >>> gazebo_ros_pkgs
Finished <<< gazebo_ros_pkgs [ 1.3 seconds ]
[build] Summary: All 6 packages succeeded!
[build] Ignored: None.
[build] Warnings: None.
[build] Abandoned: None.
[build] Failed: None.
[build] Runtime: 4 minutes and 13.0 seconds total.
[build] Note: Workspace packages have changed, please re-source setup files to use them.
问题:git clone https://github.com/ros-simulation/gazebo_ros_pkgs.git有时候无法正常克隆库,会报错。
解决方案一:
-
在github网站上下载适用于自己ROS版本的压缩包ros-simulation/gazebo_ros_pkgs: Wrappers, tools and additional API’s for using ROS with Gazebo (github.com)
-
将压缩包放到~/catkin_ws/src目录下解压缩,一般下载下来的压缩包是zip文件,需要使用unzip命令工具。使用
pip install unzip命令安装 -
使用
cd ~/catkin_ws和catkin build进行编译。
编译通过后使用命令:
roscore
开始ros服务,使用命令
source ~/catkin_ws/devel/setup.bash
rosrun gazebo_ros gazebo
开启gazebo,查看安装是否成功。
Gazebo有很多开源的模型文件,📎models.zip下载后将该附件解压缩后放在~/.gazebo中,此时在~/.gazebo/models/路径下可以看到很多模型。如果不做这一步,之后运行Gazebo仿真,可能会缺模型,这时会自动下载,Gazebo模型服务器在国外,自动下载会比较久。
Marvos安装
注意,mavros-extras一定别忘记装,否则视觉定位将无法完成
sudo apt install ros-noetic-mavros ros-noetic-mavros-extras # for ros-noetic
wget https://gitee.com/robin_shaun/XTDrone/raw/master/sitl_config/mavros/install_geographiclib_datasets.shsudo chmod a+x ./install_geographiclib_datasets.sh
sudo ./install_geographiclib_datasets.sh #这步需要装一段时间
PX4 安装
安装方式:从语雀下载压缩包PX4_Firmware,使用该压缩包解压编译,从git上下载的代码可能很多方面都要修改,而且下载速度很慢。
使用该包会报错:
[0/1] Re-running CMake...
CMake Error: The source directory "/home/robin/PX4_Firmware_13" does not exist.
Specify --help for usage, or press the help button on the CMake GUI.
FAILED: build.ninja
/usr/bin/cmake -H/home/robin/PX4_Firmware_13 -B/home/robin/PX4_Firmware_13/build/px4_sitl_default
ninja: error: rebuilding 'build.ninja': subcommand failed
make: *** [Makefile:230: px4_sitl_default] Error 1
主要是编译的CMakeCache.txt文件中的路径都是/home/robin/PX4_Firmware_13(肖老师自己电报的路径),可能编译过不了,然后自己改也是比较麻烦,我尝试改了CMakeCache.txt文件中路径问题,还是报错,还需要改build.ninja文件、cmake_install.cmake等等。这两个文件都在PX4_Firmware_13/build/px4_sitl_default目录下。~~(反正要改很多文件,你就改吧,我是把这个目录下的编译文件都改了一遍,但还是有报错)
这样看用git命令也是可以,可以通过git 克隆代码
git clone -b v1.13.2 https://github.com/PX4/PX4-Autopilot.git --recursive
git clone -b v1.13.2 https://github.com.cnpmjs.org/PX4/PX4-Autopilot.git --recursive
mv PX4-Autopilot PX4_Firmware
cd PX4_Firmware
git checkout -b xtdrone/dev v1.13.2
git submodule update --init --recursive
make px4_sitl_default gazebo
好叭,最后还是用的VS code整体修改才可以编译
chmod +x Tools/check_submodules.sh
chmod +x Tools/sitl_run.sh
最好发现还是不行,报错是:
Error creating PX4_Firmware/build/px4_sitl_default/etc -> /home/sunx/PX4_Fir
这个错误还显示不全,应该是软连接问题。
克隆又克隆不下来,编译又编译不过,丢。
新的可行方法:
-
下载语雀文档中的PX4包,解压后进入PX4_Firmware然后使用命令
rm -rf build,删除build文件夹,然后使用命令mkdir build -
使用命令重新编译
cd build cmake .. make -
使用命令
git checkout -b xtdrone/dev v1.13.2 git submodule update --init --recursive make px4_sitl_default gazebo
终于编译成功了。花了一天和一个晚上
修改 ~/.bashrc,加入以下代码,注意路径匹配,前两个source顺序不能颠倒
#配好好路径
gedit ~/.bashrc
在里面写入:
source ~/catkin_ws/devel/setup.bash
source ~/PX4_Firmware/Tools/setup_gazebo.bash ~/PX4_Firmware/ ~/PX4_Firmware/build/px4_sitl_default
#确保文件最底部是export,而不是source
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4_Firmware
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4_Firmware/Tools/sitl_gazebo关闭文件,在终端执行
source ~/.bashrc
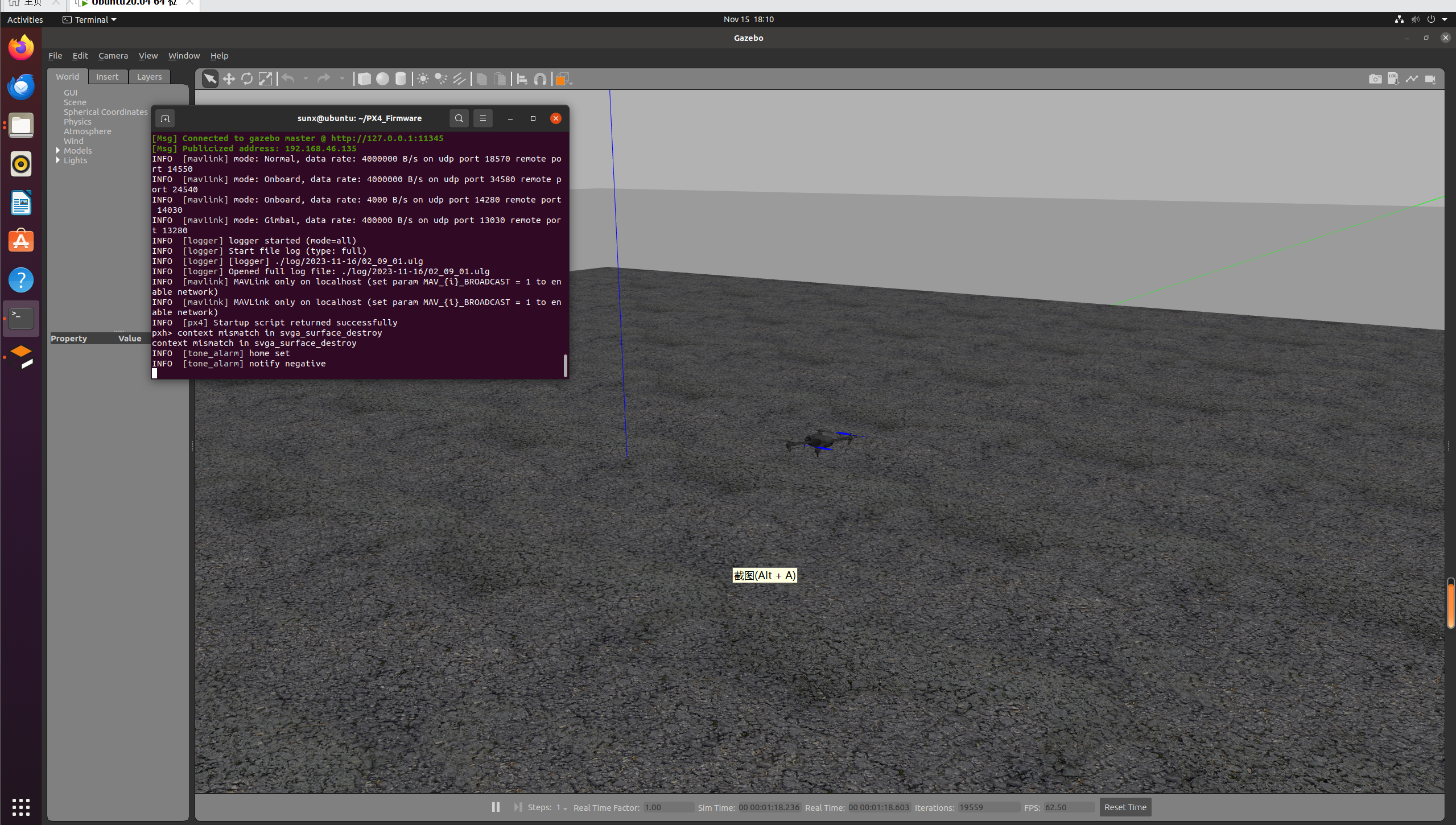
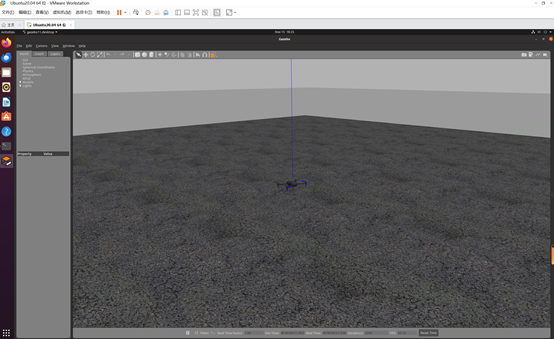
然后运行如下命令,此时会启动Gazebo,如下图所示。
cd ~/PX4_Firmware
roslaunch px4 mavros_posix_sitl.launch
安装QTGroundControl
第一次安装该软件:
sudo usermod -a -G dialout $USER
sudo apt-get remove modemmanager -y
sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -y
sudo apt install libqt5gui5 -y
sudo apt install libfuse2 -y
XTDrone下载安装
FAILED: /home/sunx/PX4_Firmware/Tools/sitl_gazebo/models/typhoon_h480/typhoon_h480.sdf
cd /home/sunx/PX4_Firmware/build/px4_sitl_default/build_gazebo && /usr/bin/python3 /home/sunx/PX4_Firmware/Tools/sitl_gazebo/scripts/jinja_gen.py /home/sunx/PX4_Firmware/Tools/sitl_gazebo/models/typhoon_h480/typhoon_h480.sdf.jinja /home/sunx/PX4_Firmware/Tools/sitl_gazebo --generate_ros_models true
Traceback (most recent call last):File "/home/sunx/PX4_Firmware/Tools/sitl_gazebo/scripts/jinja_gen.py", line 96, in <module>raise Exception("ERROR: generation would overwrite changes to `{}`. ".format(filename_out) + \
Exception: ERROR: generation would overwrite changes to `/home/sunx/PX4_Firmware/Tools/sitl_gazebo/models/typhoon_h480/typhoon_h480.sdf`. Changes should only be made to the template file `/home/sunx/PX4_Firmware/Tools/sitl_gazebo/models/typhoon_h480/typhoon_h480.sdf.jinja`. Remove `typhoon_h480.sdf` (after extracting your changes) to disable this overwrite protection.解决方案:
find . -name "typhoon.sdf"
然后使用rm 命令删除该文件
FAILED: external/Stamp/sitl_gazebo/sitl_gazebo-build
cd /home/sunx/PX4_Firmware/build/px4_sitl_default/build_gazebo && /usr/bin/cmake --build /home/sunx/PX4_Firmware/build/px4_sitl_default/build_gazebo -- -j 2
删除文件后,这个问题就可以解决了。
注意,用ctrl+c关闭仿真进程,有可能没有把Gazebo的相关进程关干净,这样再启动仿真时可能会报错。如果出现这种情况,可以用killall -9 gzclient,killall -9 gzserver 这两个命令强行关闭gazebo所有进程。
killall -9 gzclient
killall -9 gzserver
相关文章:
【XTDrone Ubuntu20.04】XTDrone+ Ubuntu20.04 + PX4安装
XTDrone仿真平台配置 文章目录 XTDrone仿真平台配置依赖安装 ROS一键安装Marvos安装PX4 安装安装QTGroundControlXTDrone下载安装 环境: VMWare 16.0 Ubuntu 22.04 (因为没人配过)Ubuntu 20.04 参考文章: 仿真平台基础配置 (yuq…...

河北大学选择ZStack Cube超融合一体机打造实训云平台
河北大学通过云轴科技ZStack Cube超融合一体机构建校园实训云平台,部署测试仅耗时1天,该平台能够更快地为学生提供高性能、高可用的云主机、云存储和云网络服务;同时也能满足日常运维管理要求,为学生提供更好的实训环境。 河北省…...
IDEA远程一键部署SpringBoot到Docker
IDEA是Java开发利器,Spring Boot是Java生态中最流行的微服务框架,docker是时下最火的容器技术,那么它们结合在一起会产生什么化学反应呢? 一、开发前准备 1. Docker安装 可以参考:https://docs.docker.com/install/ 2…...

索引三星结构
三星索引的定义,可以先给我们对索引优化提供一个大概的思路: 满足第1颗星: 取出所有的等值谓词的列,作为索引最开头的列——以任意顺序都可以。 满足第2颗星: 将order by加入到索引列,不要改变这些列的顺…...

rust 笔记 高级错误处理
文章目录 错误处理组合器or() 和 and()or_else() 和 and_then()filtermap() 和 map_err()map_or() 和 map_or_else()ok_or() and ok_or_else() 自定义错误类型错误转换 From 特征 归一化不同的错误类型Box<dyn Error>自定义错误类型 简化错误处理thiserroranyhow 错误处理…...

python+Django 使用apscheduler实现定时任务 管理调度
apscheduler实现定时任务 管理调度 在Django 项目中经常会用到定时任务去处理一些业务处理 使用 APScheduler 可以轻松地实现定时任务的管理和调度。你可以通过以下步骤来创建、启动、停止和删除定时任务: 1.创建调度器对象: from apscheduler.schedu…...

Java编程中,异步操作流程中,最终一致性以及重试补偿的设计与实现
一、背景 微服务设计中,跨服务的调用,由于网络或程序故障等各种原因,经常会出现调用失败而需要重试。另外,在异步操作中,我们提供接口让外部服务回调。回调过程中,也可能出现故障。 这就要求我们主动向外…...
吴恩达《机器学习》8-7:多元分类
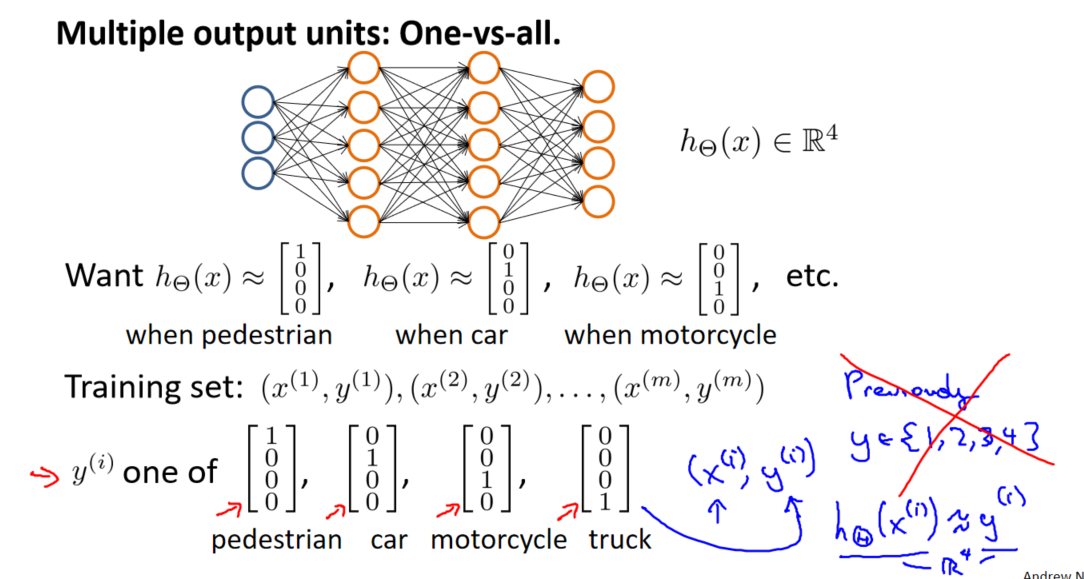
在机器学习领域,经常会遇到不止两个类别的分类问题。这时,需要使用多类分类技术。本文将深入探讨多类分类,并结合学习内容中的示例,了解神经网络在解决这类问题时的应用。 一、理解多类分类 多类分类问题是指当目标有多个类别时…...
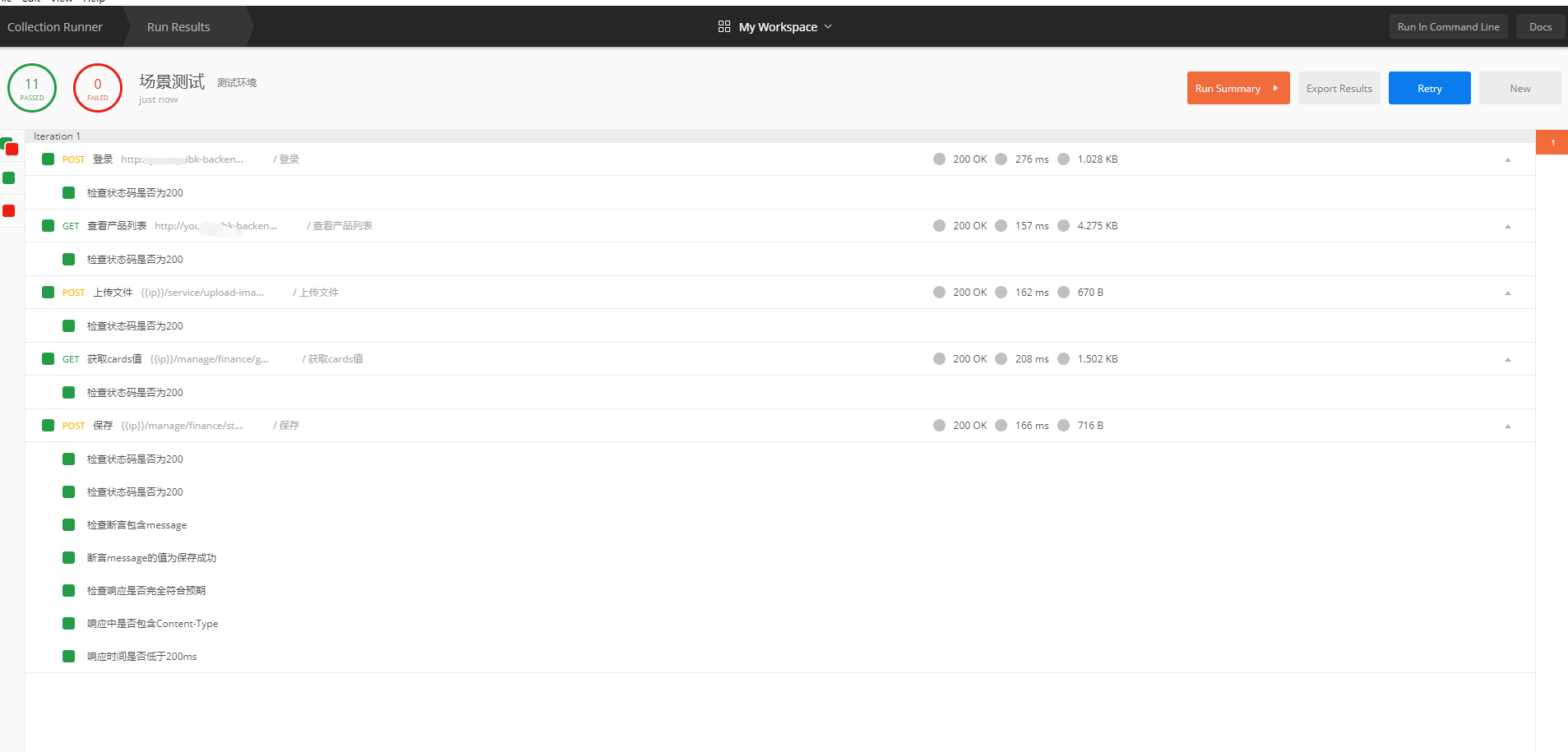
Postman批量运行用例
近期在复习Postman的基础知识,在小破站上跟着百里老师系统复习了一遍,也做了一些笔记,希望可以给大家一点点启发。 一)注意点 有上传文件的接口,需要做如下设置: 1、打开能读取外部文件的开关 2、把需要…...

20个Golang最佳实践
在本教程中,我们将探讨 Golang 中的 20 个最佳编码实践。它将帮助您编写有效的 Go 代码。 #20:使用正确的缩进 良好的缩进使您的代码具有可读性。一致地使用制表符或空格(最好是制表符)并遵循 Go 标准缩进约定。 package main …...

Java 类之 java.lang.System
Java 类之 java.lang.System 文章目录 Java 类之 java.lang.System一、简介二、主要功能1、currentTimeMillis() - 获取当前时间的毫秒数说明代码示例 2、getProperty(String key) - 获取系统属性说明代码示例 3、exit(int status) - 终止虚拟机说明代码示例 4、arraycopy(Obje…...
)
认识Modbus通信协议(笔记)
Modbus 莫迪康 1979年 PLC 1969年 什么是modbus? 它是一个Bus,即总线协议。比如串口协议、IIC协议、SPI都是通信协议。 协议,顾名思义是一种规定和约束 Modbus协议是一种引用层的报文传输协议,RTU、ASCLL、TCP,都属于Modbus协…...

【算法】距离(最近公共祖先节点)
题目 给出 n 个点的一棵树,多次询问两点之间的最短距离。 注意: 边是无向的。所有节点的编号是 1,2,…,n。 输入格式 第一行为两个整数 n 和 m。n 表示点数,m 表示询问次数; 下来 n−1 行,每行三个整数 x,y,k&am…...

基于SpringBoot的SSMP整合案例(消息一致性处理与表现层开发)
消息一致性处理 在后端执行完相应的操作后,我们需要将执行操作后的结果与数据返回前端,前端 调用我们传回去的数据,前端是如何知道我们传回去的数据名称的? 答:前后端遵循了同一个"协议"。这个协议就是定义…...
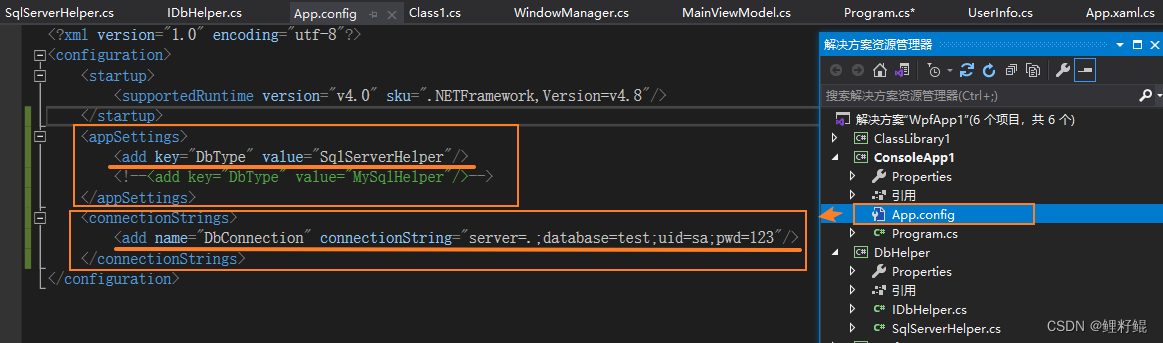
c#之反射详解
总目录 文章目录 总目录一、反射是什么?1、C#编译运行过程2、反射与元数据3、反射的优缺点 二、反射的使用1、反射相关的类和命名空间1、System.Type类的应用2、System.Activator类的应用3、System.Reflection.Assembly类的应用4、System.Reflection.Module类的应用…...
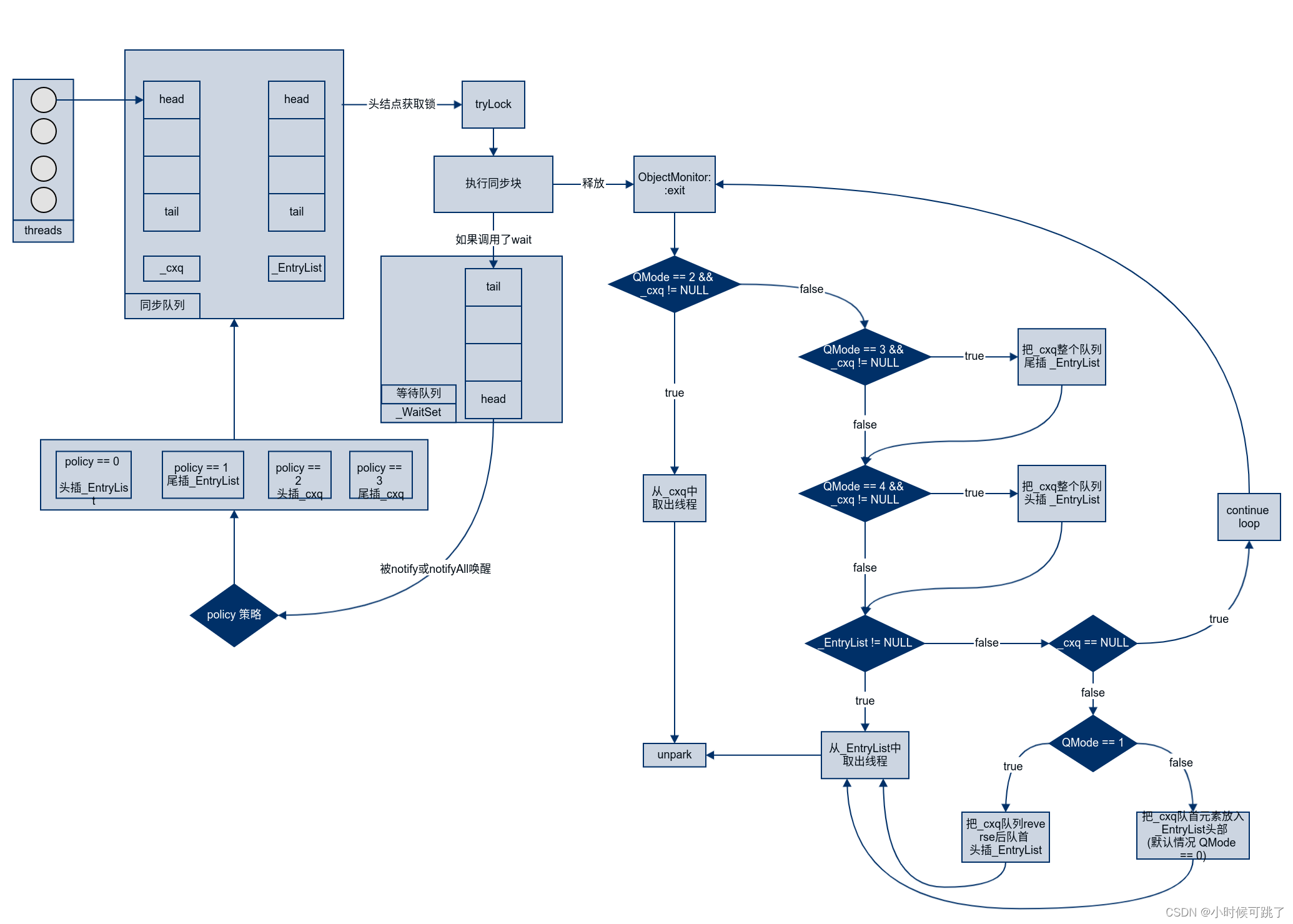
synchronized jvm实现思考
底层实现时,为什么使用了cxq队列和entryList双向链表?这里为什么不跟AQS中使用一个队列就行了,加了一个entryList的目的是为了什么? 个人理解这里多一个entryList,可能是用于减少频繁的cas操作。假设存在很多锁竞争时&…...

【hive基础】hive常见操作速查
文章目录 一. hive变量操作1. 查看当前hive配置信息2. 设置变量3. 修改变量4. 进入hive终端重新加载配置 二. 执行hive sql三. 启动hive 一. hive变量操作 1. 查看当前hive配置信息 # 查看当前所有配置信息 hive > set ;# 查看某一项配置信息 hive >set hive.metastore…...

2024年山东省职业院校技能大赛中职组“网络安全”赛项竞赛试题-A
2024年山东省职业院校技能大赛中职组 “网络安全”赛项竞赛试题-A 一、竞赛时间 总计:360分钟 二、竞赛阶段 竞赛阶段 任务阶段 竞赛任务 竞赛时间 分值 A、B模块 A-1 登录安全加固 180分钟 200分 A-2 本地安全策略设置 A-3 流量完整性保护 A-4 …...
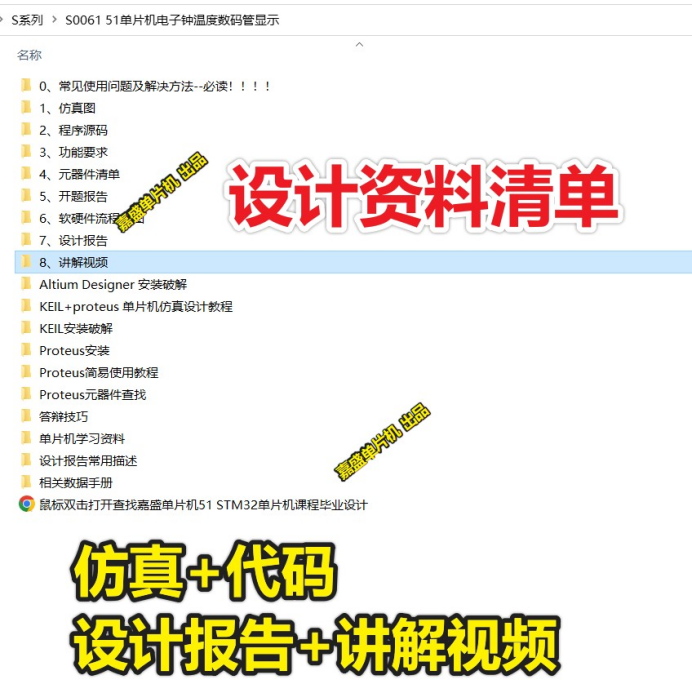
基于51单片机电子钟温度计数码显示设计( proteus仿真+程序+设计报告+讲解视频)
这里写目录标题 ✅1.主要功能:✅讲解视频:✅2.仿真设计✅3. 程序代码✅4. 设计报告✅5. 设计资料内容清单&&下载链接✅[资料下载链接:](https://docs.qq.com/doc/DS0Nja3BaQmVtWUpZ) 基于51单片机电子钟温度检测数码显示设计( proteu…...

jenkins+centos7上传发布net6+gitlab
工作中实践了一下jenkins的操作,所以记录一下这次经验,没有使用到docker 先看下成果: 选择发布项目 选择要发布的分支 构建中 发布成功 开始 首先安装好jenkins并注册自己的jenkins账号 因为我们的项目代码管理使用的是gitlab,…...

Nunchaku FLUX.1-dev实战:手把手教你用ComfyUI生成惊艳AI图片
Nunchaku FLUX.1-dev实战:手把手教你用ComfyUI生成惊艳AI图片 1. 环境准备与快速部署 1.1 硬件与软件要求 在开始之前,请确保你的系统满足以下基本要求: 显卡:NVIDIA显卡(推荐RTX 30/40系列,显存8GB&am…...

小程序对商家私域运营到底有多重要?
小程序对商家私域运营到底有多重要?在企业持续获取客户成本不断上升的背景下,越来越多商家开始关注“私域运营”,而小程序也逐渐成为这一体系中的核心工具。小程序对商家私域运营的重要性,本质上体现在“用户沉淀能力与转化效率的…...

EVA-02模型辅助软件测试:自动化生成测试用例与边界条件描述
EVA-02模型辅助软件测试:自动化生成测试用例与边界条件描述 如果你是一名软件测试工程师,下面这个场景你一定不陌生:产品经理递过来一份几十页的需求文档,你需要在几天内,把它拆解成成百上千条逻辑清晰、覆盖全面的测…...

BUUCTF-[HITCON 2017]SSRFme
代码分析<?phpif (isset($_SERVER[HTTP_X_FORWARDED_FOR])) { //HTTP_X_FORWARDED_FOR可以获取客户端真正ip地址,和各个代理IP地址$http_x_headers explode(,, $_SERVER[HTTP_X_FORWARDED_FOR]); //拆分字符串,以,分割$_SERVER[REMOTE…...

5个关键步骤:OpenCore Legacy Patcher旧Mac设备系统升级全攻略
5个关键步骤:OpenCore Legacy Patcher旧Mac设备系统升级全攻略 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 随着苹果公司对旧款Mac设备的系统支…...

Janus-Pro-7B开发者案例:基于7860 Web UI构建内部AI知识助手
Janus-Pro-7B开发者案例:基于7860 Web UI构建内部AI知识助手 1. 项目背景与价值 企业内部知识管理一直是个头疼的问题。各种文档、图片、报告散落在不同系统中,员工想要快速找到需要的信息往往需要花费大量时间。传统的搜索工具只能基于文字匹配&#…...

IndexTTS 2.0优化指南:如何选择参考音频,获得最佳克隆效果
IndexTTS 2.0优化指南:如何选择参考音频,获得最佳克隆效果 1. 引言:为什么参考音频如此重要? 在语音合成领域,参考音频就像是一把钥匙,决定了最终生成声音的质量和相似度。IndexTTS 2.0作为一款零样本音色…...

【手把手实战!fMRI数据预处理全流程解析】SPM12操作指南
1. fMRI数据预处理入门:为什么需要SPM12? 第一次接触fMRI数据分析的朋友,往往会被各种专业术语吓到——DICOM、NIFTI、头动校正、空间标准化...这些名词听起来就让人头大。但别担心,就像我第一次在实验室处理数据时导师说的&…...

重新定义AI助手体验:突破Cursor Pro限制的5个技术方案
重新定义AI助手体验:突破Cursor Pro限制的5个技术方案 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your tri…...
数据转换的艺术:用DataTransformer优化表单处理
引言 在处理复杂的表单数据时,如何将多个字段的数据有效地转换成一个可存储的字符串是一个常见的问题。在本文中,我们将探讨如何使用Symfony框架中的DataTransformer来解决这个问题,结合一个实际的案例来展示其实现过程。 案例背景 假设我们有一个名为EffectType的自定义…...