MVSNet论文笔记
MVSNet论文笔记
- 摘要
- 1 引言
- 2 相关基础
- 2.1 多视图立体视觉重建(MVS Reconstruction)
- 2.2 基于学习的立体视觉(Learned Stereo)
- 2.3 基于学习的多视图的立体视觉(Learned MVS)
- 3 MVSNet
- 3.1 网络架构
- 3.2 提取图片特征
- 3.3 构建代价体
- 3.4 可微分单应性变换(Differentiable Homography)
- 3.4 代价度量
Yao, Y., Luo, Z., Li, S., Fang, T., Quan, L. (2018). MVSNet: Depth Inference for Unstructured Multi-view Stereo. In: Ferrari, V., Hebert, M., Sminchisescu, C., Weiss, Y. (eds) Computer Vision – ECCV 2018. ECCV 2018. Lecture Notes in Computer Science(), vol 11212. Springer, Cham. https://doi.org/10.1007/978-3-030-01237-3_47
摘要
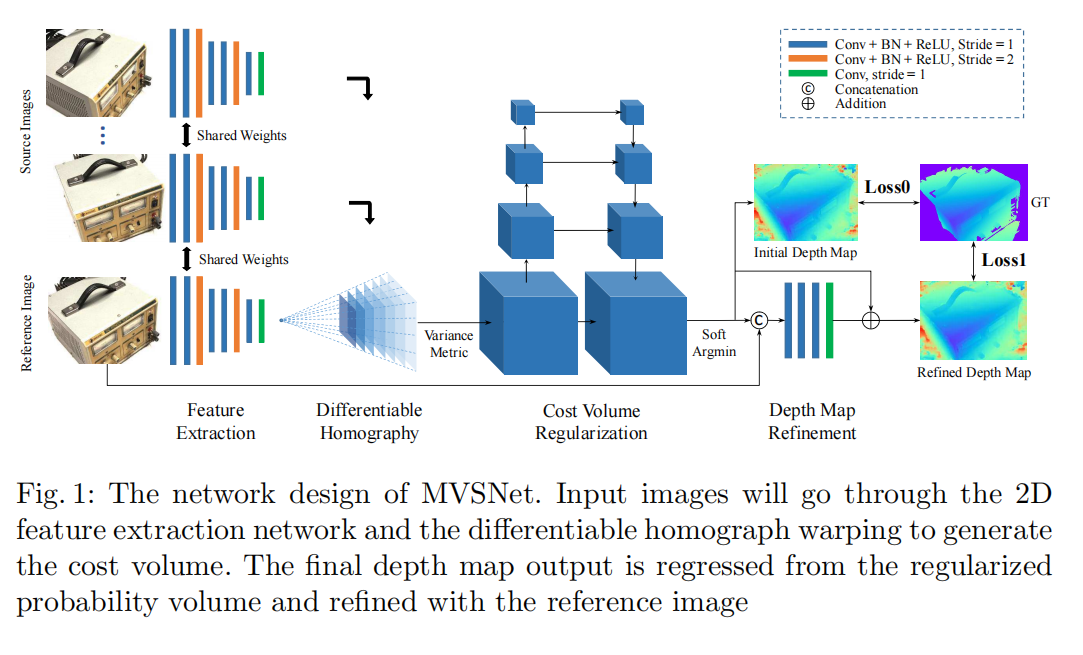
作者提出了一种端到端深度学习架构,对多视图图像进行深度图推断。在网络中,作者首先提取深度视觉图像特征,然后通过可微分单应性变换在参考相机坐标系上构建三维代价体。接下来,应用三维卷积对初始深度图进行正则化和回归,然后用参考图像进行细化,最终输出推断的深度图。该框架使用基于方差的代价度量灵活地适应任意的n视图输入,该度量将多个特征映射到一个代价特征中。在大规模室内DTU数据集上对MVSNet进行了演示。通过简单的后处理,该方法不仅显著优于以前的最新技术,而且运行速度也快了好几倍。还在复杂的室外坦克和寺庙数据集上评估了MVSNet,在2018年4月18日之前,该方法在没有进行任何微调的情况下排名第一,显示出MVSNet具有很强的泛化能力。
1 引言
多视图立体视觉(MVS, Multi-view stereo)估计重叠图像的密集表示是计算机视觉领域研究了数十年的核心问题。传统的方法使用手工的相似度度量和工程正则化(例如,归一化互相关和半全局匹配)来计算对应的密集和恢复三维点。虽然这些方法在理想的传感器下显示了良好的结果,但它们存在一些共同的局限性。例如,场景的低纹理、镜面和反射区域使密集匹配难以处理,从而导致不完整的重建。在最近的MVS基准测试中报道,尽管目前最先进的算法在精度上表现得很好,但重建的完整性仍然有很大的改进空间。
最近卷积神经网络(CNNs)研究的成功也引发了人们对改进立体重建的兴趣。从概念上讲,基于学习的方法可以引入全局语义信息,如镜面和反射先验,以实现更鲁棒的匹配。有一些尝试在双视图立体匹配上,用基于学习的方式取代手工的相似度量或工程正则化。这些工作已经显示出了良好的结果,并在立体基准测试集中逐渐超过了传统的方法。事实上,立体匹配任务非常适合使用基于CNN的方法,因为图像对被预先纠正,因此问题成为不影响摄像机参数的水平像素级视差估计。
然而,直接将学习到的双视图立体视觉扩展到多视图场景并不简单。虽然可以简单地对所有选择的图像对进行立体匹配,然后将所有成对的重建合并到一个全局点云,但这种方法不能充分利用多视图信息,导致不准确的结果。与立体匹配不同,输入到MVS的图像可能是任意的相机几何形状,这给基于学习的方法带来了一个棘手的问题。
只有少数工作认识到这个问题,并尝试将CNN应用于MVS重建:SurfaceNet预先构造了彩色体素立方体(CVC, Colored Voxel Cubes),它将所有图像像素的颜色和摄像机信息结合到单个体积作为网络的输入。相比之下,基于学习的立体视觉机制(LSM, Learned Stereo Machine)直接利用可微分投影/非投影来实现端到端训练/推理。
然而,这两种方法都利用了规则网格的体积表示。由于3D体积巨大内存消耗的限制,他们的网络很难扩展: LSM只处理低体积分辨率的合成对象,SurfaceNet采用启发式分治策略,需要很长时间进行大规模重建。在2018年4月18日之前,现代MVS基准测试的主流仍被传统的方法所占据。
为此,作者提出了一种用于深度图推理的端到端深度学习架构,它每次计算一个深度图,而不是一次计算整个3D场景。与其它基于深度图的MVS方法类似,MVSNet以一个参考图像和几个源图像作为输入,并推断出参考图像的深度图。这里的关键是可微分单应性变换操作,它隐式地编码网络中的摄像机几何结构,从二维图像特征构建三维代价体,并实现端到端训练。
为了适应输入中任意数量的源图像,我们提出了一个基于方差的度量方法,它将多个特征映射到一个代价体特征中。这个代价体经过多尺度的三维卷积和回归出一个初始深度图。最后,利用参考图像对深度图进行细化,以提高边界区域的精度。
MVSNet和以前基于学习的方法之间有两个主要的区别。首先,为了进行深度图推断,MVSNet的3D代价体是建立在相机的坐标系之上,而不是常规的欧几里得空间。其次,MVSNet将MVS重建解耦到较小的每一个视图深度图估计问题上,这使得大规模重建成为可能。
2 相关基础
2.1 多视图立体视觉重建(MVS Reconstruction)
根据输出表示法,MVS方法可分为1)直接点云重建、2)体素重建、3)深度图重建。基于点云的方法直接基于三维点,通常依靠传播策略逐步强化重建。由于点云的传播是按顺序进行的,这些方法很难被完全并行化,而且通常需要很长的处理时间。基于体素的方法将三维空间划分为规则的网格,然后估计每个体素是否附着在表面上。这种表示方法的缺点是空间离散化误差和高内存消耗。相比之下,深度图是所有表示方式中最灵活的。它将复杂的MVS问题解耦为相对较小的每一幅视图的深度图估计问题,该问题一次只关注一个参考图像和几个源图像。此外,深度图可以很容易地融合到点云或体素重建上。根据最近的MVS基准测试,在2018年4月18日之前最好的MVS算法都是基于深度图的方法。
2.2 基于学习的立体视觉(Learned Stereo)
与使用传统的手工图像特征和匹配度量不同,最近的立体视觉研究使用深度学习技术进行成对的补丁匹配。Han等人首先提出了一个深度网络来匹配两个图像补丁。Zbontar等人和Luo等人使用学习到的特征进行立体匹配和半全局匹配(SGM)进行后处理。除了成对匹配代价外,基于学习的方法也应用于代价正则化。SGMNet学习调整SGM中使用的参数,而CNN-CRF 在网络中整合了条件随机场优化,用于端到端立体视觉学习。在2018年4月18日之前,最先进的方法是GCNet ,它应用3D CNN来规范代价体,并通过soft argmin操作回归视差。在KITTI数据集中有报道,基于学习的立体视觉方法,特别是端到端的学习算法,明显优于传统的立体视觉方法。
2.3 基于学习的多视图的立体视觉(Learned MVS)
在2018年4月18日之前,研究者们对基于学习的MVS方法的尝试较少。哈特曼等人提出了学习到的多补丁相似度来替代传统的MVS重建的代价度量。第一个基于学习的处理MVS问题的算法是SurfaceNet ,它通过复杂的体素级视图选择预先计算代价体,并使用三维CNN进行正则化和推断表面体素。与MVSNet最相关的方法是LSM,其中摄像机参数在网络中被编码为投影操作,以形成代价体,并使用3D CNN对一个体素是否属于某一表面进行分类。然而,由于体素表示的普遍缺点,SurfaceNet和LSM的网络被限制在小规模的重建。它们要么应用分治策略,要么只适用于具有低分辨率输入的合成数据。相比之下,MVSNet专注于每次为一个参考图像生成深度图,这使得MVSNet可以直接自适应地重建一个大型场景。
3 MVSNet
3.1 网络架构
3.2 提取图片特征
MVSNet的第一步是提取N个输入图像的深度特征 ( F i ) i = 1 N (F_i)_{i=1}^N (Fi)i=1N进行密集匹配。采用八层二维CNN,将第3层和第6层的步长设置为2,将特征金字塔划分为三个尺度。在每个尺度内,应用两个卷积层来提取更高级别的图像表示。除了最后一层,每个卷积层之后都是一个批归一化(BN)层和一个校正后的线性单位(ReLU)。此外,类似于常见的匹配任务,参数在所有特征金字塔之间共享,以实现高效学习。二维网络的输出是32通道特征图,与输入图像相比,32通道特征图在各维度上缩小了4个。值得注意的是,虽然特征提取后图像帧缩小,但每个剩余像素的原始相邻信息已经被编码到32通道像素描述符中,防止了密集匹配丢失有用的背景信息。与简单地对原始图像进行密集匹配相比,提取的特征图显著提高了重建质量。

3.3 构建代价体
接下来,从提取的特征图和输入相机中建立1个3D代价体。虽然之前的工作使用规则网格划分空间,对于我们的深度地图推断任务,我们在参考相机坐标系上构造代价体。为简单起见,下面 I 1 I_1 I1表示为参考图像, ( I i ) i = 2 N (I_i)_{i=2}^N (Ii)i=2N表示源图像, ( K i , R i , t i ) i = 1 N (K_i,R_i,t_i)_{i=1}^N (Ki,Ri,ti)i=1N表示与特征图对应的相机内参、旋转矩阵和平移。
3.4 可微分单应性变换(Differentiable Homography)
将所有特征图转换成参考相机的不同前平行平面,形成N个特征体 ( V i ) i = 1 N (V_i)_{i=1}^N (Vi)i=1N。在深度d下,坐标映射从变换后的特征图 V i ( d ) V_i(d) Vi(d)到 F i F_i Fi通过平面变换 x ′ ∼ H i ( d ) ⋅ x x'∼H_i(d)·x x′∼Hi(d)⋅x,其中“∼”表示投影等式, H i ( d ) H_i(d) Hi(d)表示第i个特征图与参考特征图在深度d处的单应性矩阵。设n1为参考相机的主轴,单应性用3×3矩阵表示:
H i ( d ) = K i ⋅ R i ⋅ ( I − ( t 1 − t i ) ⋅ n 1 T d ) ⋅ R 1 T ⋅ K 1 T ( 1 ) \mathbf{H}_i(d)=\mathbf{K}_i \cdot \mathbf{R}_i \cdot\left(\mathbf{I}-\frac{\left(\mathbf{t}_1-\mathbf{t}_i\right) \cdot \mathbf{n}_1^T}{d}\right) \cdot \mathbf{R}_1^T \cdot \mathbf{K}_1^T ~~~~(1) Hi(d)=Ki⋅Ri⋅(I−d(t1−ti)⋅n1T)⋅R1T⋅K1T (1)
不失一般性,参考特征图F1的单应性本身是一个3×3单位矩阵。变换过程类似于经典的平面扫描立体视觉算法,除了可微双线性线性插值用于从特征图 ( F i ) i = 1 N (F_i)_{i=1}^N (Fi)i=1N采样像素而不是图像 ( I i ) i = 1 N (I_i)_{i=1}^N (Ii)i=1N。作为连接二维特征提取和三维正则化网络的核心步骤,以可微的方式实现了变换操作,实现了深度图推理的端到端训练。
3.4 代价度量
接下来,将多个特征体 ( V i ) i = 1 N (V_i)_{i=1}^N (Vi)i=1N聚合为一个代价体C。为了适应任意数量的输入视图,作者提出了一个基于方差的代价度量M用于N视图相似性度量。设W、H、D、F为输入图像的宽度、高度、深度采样数和特征图的通道数,V = W/4·H/4·D·F为特征体大小,成本度量被定义为映射 M : R V × ⋯ × R V ⏟ N → R V \mathcal{M}: \underbrace{\mathbb{R}^V \times \cdots \times \mathbb{R}^V}_N \rightarrow \mathbb{R}^V M:N RV×⋯×RV→RV:
C = M ( V 1 , ⋯ , V N ) = ∑ i = 1 N ( V i − V i ‾ ) 2 N ( 2 ) \mathbf{C}=\mathcal{M}\left(\mathbf{V}_1, \cdots, \mathbf{V}_N\right)=\frac{\sum_{i=1}^N\left(\mathbf{V}_i-\overline{\mathbf{V}_i}\right)^2}{N}~~~~(2) C=M(V1,⋯,VN)=N∑i=1N(Vi−Vi)2 (2)
其中 V i ‾ \overline{\mathbf{V}_i} Vi是所有特征体的平均体,上面所有操作都是按元素个体操作。
大多数传统的MVS方法以启发式的方式聚合参考图像和所有源图像之间的配对代价。相反,MVSNet的度量设计遵循的原则是所有的视图都应该对匹配成本的贡献相同,而不优先考虑参考图像。在2018年4月18日之前的工作应用了多个CNN层的平均操作来推断多补丁相似性。在这里,作者选择了“方差”操作,因为“均值”操作本身没有提供关于特征差异的信息,而且它们的网络需要CNN前层和CNN后层来帮助推断相似性。相比之下,基于方差的代价度量明确地测量了多视图特征的差异。
相关文章:
MVSNet论文笔记
MVSNet论文笔记 摘要1 引言2 相关基础2.1 多视图立体视觉重建(MVS Reconstruction)2.2 基于学习的立体视觉(Learned Stereo)2.3 基于学习的多视图的立体视觉(Learned MVS) 3 MVSNet3.1 网络架构3.2 提取图片…...

大型 APP 的性能优化思路
做客户端开发都基本都做过性能优化,比如提升自己所负责的业务的速度或流畅性,优化内存占用等等。但是大部分开发者所做的性能优化可能都是针对中小型 APP 的,大型 APP 的性能优化经验并不会太多,毕竟大型 APP 就只有那么几个&…...

K8S配置资源管理
这里写目录标题 K8S配置资源管理一.Secret1.介绍2.Secret 有四种类型3.创建 Secret4.使用方式 二.ConfigMap1.介绍2.创建 ConfigMap3.Pod 中使用 ConfigMap4.用 ConfigMap 设置命令行参数5.通过数据卷插件使用ConfigMap6.ConfigMap 的热更新7.ConfigMap 更新后滚动更新 Pod K8S…...
Redis 的集群模式实现高可用
来源:Redis高可用:武林秘籍存在集群里,那稳了~ (qq.com) 1. 引言 前面我们已经聊过 Redis 的主从同步(复制)和哨兵机制,这期我们来聊 Redis 的集群模式。 但是在超大规模的互联网应用中,业务规…...

21、嵌套路由实战操作
1、创建内嵌子路由,你需要添加一个vue文件,同时添加一个与该文件同名的目录用来存放子视图组件。 2、在父组件(.vue)内增加用于显示子视图内容 新建文件 pages\index_id.vue 生成的对应路由 {path: "/",component: _…...

WPF 控件的缩放和移动
WPF 控件的缩放和移动 1.页面代码 <ContentControl ClipToBounds"True" Cursor"SizeAll"><Viewboxx:Name"viewbox"MouseDown"viewbox_MouseDown"MouseMove"viewbox_MouseMove"MouseWheel"Viewbox_MouseWhee…...

Python and和or的优先级实例比较
Python and和or的优先级 and和or都是Python的逻辑运算符,都为保留字。通常情况下,在没有括号影响,and和or的优先级中and在代码的逻辑运算过程中会相对优先一些,及在同一行的Python代码中,and会优先与or执行。下面将通…...
数据结构与算法编程题2
逆置线性表,使空间复杂度为 O(1) #include <iostream> using namespace std;typedef int ElemType; #define Maxsize 100 #define OK 1 #define ERROR 0 typedef struct SqList {ElemType data[Maxsize];int length; }SqList;void Init_SqList(SqList& …...

Java开发者的Python快速进修指南:控制之if-else和循环技巧
简单介绍 在我们今天的学习中,让我们简要了解一下Python的控制流程。考虑到我们作为有着丰富Java开发经验的程序员,我们将跳过一些基础概念,如变量和数据类型。如果遇到不熟悉的内容,可以随时查阅文档。但在编写程序或逻辑时&…...
二进制部署k8s集群-过程中的问题总结(接上篇的部署)
1、kube-apiserver部署过程中的问题 kube-apiserver.conf配置文件更改 2、calico的下载地址 curl https://docs.projectcalico.org/v3.20/manifests/calico.yaml -O 这里如果kubernetes的节点服务器为多网卡配置会产生报错 修改calino.yaml配置文件 解决方法: 调…...

IOS 关于CoreText的笔记
放大 一.CoreText计算attributeString显示所占区域 百度搜索有三种方法: 1.方法 - (CGRect)boundingRectWithSize:(CGSize)size options:(NSStringDrawingOptions)options context:(nullable NSStringDrawingContext *)context 2.使用CTFrameRef 的 CTFrameGetLin…...

基础课6——开放领域对话系统架构
开放领域对话系统是指针对非特定领域或行业的对话系统,它可以与用户进行自由的对话,不受特定领域或行业的知识和规则的限制。开放领域对话系统需要具备更广泛的语言理解和生成能力,以便与用户进行自然、流畅的对话。 与垂直领域对话系统相比…...
)
Hive常见的面试题(十二道)
Hive 1. Hive SQL 的执行流程 ⾸先客户端通过shell或者Beeline等⽅式向Hive提交SQL语句,之后sql在driver中经过 解析器(SQL Parser):将 SQL 字符串转换成抽象语法树 AST,这一步一般都用第三方工具库完成,比如 ANTLR&…...

1688商品详情API跨境专用接口php java
一、引言 随着全球电子商务的快速发展,跨境电子商务已经成为一种重要的国际贸易形式。1688作为全球最大的B2B电子商务平台之一,不仅拥有大量的商品资源,还为商家提供了丰富的API接口,以实现更高效、更便捷的电子商务活动。其中&a…...

h264流播放
参考文章: Android MediaCodec硬解码H264文件-CSDN博客...
02-1解析xpath
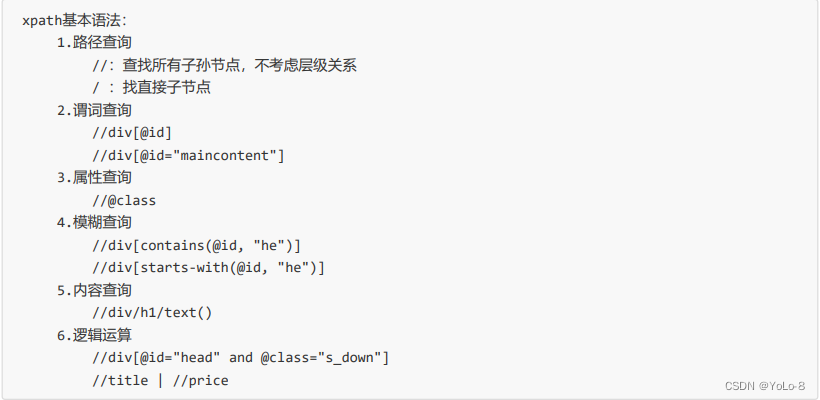
我是在edge浏览器中安装的xpath,需要安装的朋友可以参考下面这篇博客最新版edge浏览器中安装xpath插件 一、xpathd的使用 安装lxml pip install lxml ‐i https://pypi.douban.com/simple导入lxml.etree from lxml import etreeetree.parse() 解析本地文件 htm…...

Python算法——树的镜像
Python中的树的镜像算法详解 树的镜像是指将树的每个节点的左右子树交换,得到一棵新的树。在本文中,我们将深入讨论如何实现树的镜像算法,提供Python代码实现,并详细说明算法的原理和步骤。 树的镜像算法 树的镜像可以通过递归…...

ModStartCMS v7.6.0 CMS备份恢复优化,主题开发文档更新
ModStart 是一个基于 Laravel 模块化极速开发框架。模块市场拥有丰富的功能应用,支持后台一键快速安装,让开发者能快的实现业务功能开发。 系统完全开源,基于 Apache 2.0 开源协议,免费且不限制商业使用。 功能特性 丰富的模块市…...

vscode 推送本地新项目到gitee
一、gitee新建仓库 1、填好相关信息后点击创建 2、创建完成后复制 https,稍后要将本地项目与此关联 3、选择添加远程存储库 4、输入仓库地址,选择从URL添加远程存储仓库 5、输入仓库名称,确保仓库名一致...

C++函数指针变量
#include <iostream> using namespace std;void MyFun(int x){cout << x << endl; }//函数指针的声明 void (*FunP) (int);/*** MyFun的函数名与FunP函数指针都是一样的,即都是函数指针* MyFun函数名是一个“函数指针常量”* FunP是一个“函数指针…...

斯年智驾IGV精准定位 赋能集装箱智慧港口升级
在集装箱港口智能化作业中,IGV运输车的定位精度直接决定码头转运效率、对接精准度与作业安全性。集装箱装卸、堆存、转运环节衔接紧密,毫米级的定位偏差,都可能造成箱体对接错位、装卸卡顿、物流链路停滞等问题,严重影响港口整体作…...
的职业规划是什么呢?)
30岁之后IT人士(程序员)的职业规划是什么呢?
前段也看到ibm的寇卫东的一篇文章关于职业规划的,现在看看,这些职业规划都是理想状态下的产物,很多时候,限于我们自身水平、时间、空间的影响,很多是看着很美,其实却远远的达不到,不能仅仅说让人…...

zotero-addons:Zotero生态扩展框架的模块化设计与架构解析
zotero-addons:Zotero生态扩展框架的模块化设计与架构解析 【免费下载链接】zotero-addons Zotero Add-on Market | Zotero插件市场 | Browsing and installing plugins within Zotero 项目地址: https://gitcode.com/gh_mirrors/zo/zotero-addons 在学术研究…...

洛雪音乐音源完全指南:如何免费获取全网高品质音乐资源
洛雪音乐音源完全指南:如何免费获取全网高品质音乐资源 【免费下载链接】lxmusic- lxmusic(洛雪音乐)全网最新最全音源 项目地址: https://gitcode.com/gh_mirrors/lx/lxmusic- 作为音乐爱好者,你是否厌倦了在不同音乐平台间来回切换只为找到一首…...

FastJson2与Spring 6整合配置详解:别再只引入一个fastjson2依赖了
FastJson2与Spring 6整合配置详解:模块化设计的正确打开方式 在Java生态中,JSON处理库的选型一直是开发者关注的焦点。FastJson以其出色的性能表现赢得了大量用户的青睐,但随着FastJson2的发布,许多开发者发现简单的依赖升级并不能…...

3分钟学会洛雪音乐音源配置:免费获取全网高品质音乐的终极指南
3分钟学会洛雪音乐音源配置:免费获取全网高品质音乐的终极指南 【免费下载链接】lxmusic- lxmusic(洛雪音乐)全网最新最全音源 项目地址: https://gitcode.com/gh_mirrors/lx/lxmusic- 还在为找不到高质量免费音乐资源而烦恼吗?lxmusic-项目为你提…...

在电脑上免费畅玩Switch游戏:Ryujinx模拟器终极完整指南
在电脑上免费畅玩Switch游戏:Ryujinx模拟器终极完整指南 【免费下载链接】Ryujinx 用 C# 编写的实验性 Nintendo Switch 模拟器 项目地址: https://gitcode.com/GitHub_Trending/ry/Ryujinx 你是否曾梦想在电脑上体验《塞尔达传说:王国之泪》的壮…...

基于YOLOv10的低延迟AI瞄准系统:多平台硬件加速与实时检测架构设计
基于YOLOv10的低延迟AI瞄准系统:多平台硬件加速与实时检测架构设计 【免费下载链接】yolov8_aimbot Aim-bot based on AI for all FPS games 项目地址: https://gitcode.com/gh_mirrors/yo/yolov8_aimbot Sunone Aimbot是一个基于YOLOv10深度学习模型的FPS游…...

终极指南:3种方案快速突破城通网盘下载限制,实现全速免费下载
终极指南:3种方案快速突破城通网盘下载限制,实现全速免费下载 【免费下载链接】ctfileGet 获取城通网盘一次性直连地址 项目地址: https://gitcode.com/gh_mirrors/ct/ctfileGet 你是否曾为城通网盘缓慢的下载速度而烦恼?ctfileGet 是…...

ATK-UART2ETH模块实战:5分钟搞定串口设备联网,告别老旧PLC的通讯烦恼
ATK-UART2ETH模块实战:5分钟搞定串口设备联网,告别老旧PLC的通讯烦恼 在工业自动化领域,老旧设备改造一直是个令人头疼的问题。想象一下这样的场景:车间里那台服役十年的西门子S7-200 PLC还在兢兢业业地工作,但它唯一…...