自动驾驶学习笔记(九)——车辆控制
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门
文章目录
前言
控制器设计
比例积分微分控制
线性二次调节器
模型预测控制
Tips
总结
前言
见《自动驾驶学习笔记(一)——Apollo平台》
见《自动驾驶学习笔记(二)——Apollo入门》
见《自动驾驶学习笔记(三)——场景设计》
见《自动驾驶学习笔记(四)——变道绕行仿真》
见《自动驾驶学习笔记(五)——绕行距离调试》
见《自动驾驶学习笔记(六)——Apollo安装》
见《自动驾驶学习笔记(七)——感知融合》
见《自动驾驶学习笔记(八)——路线规划》
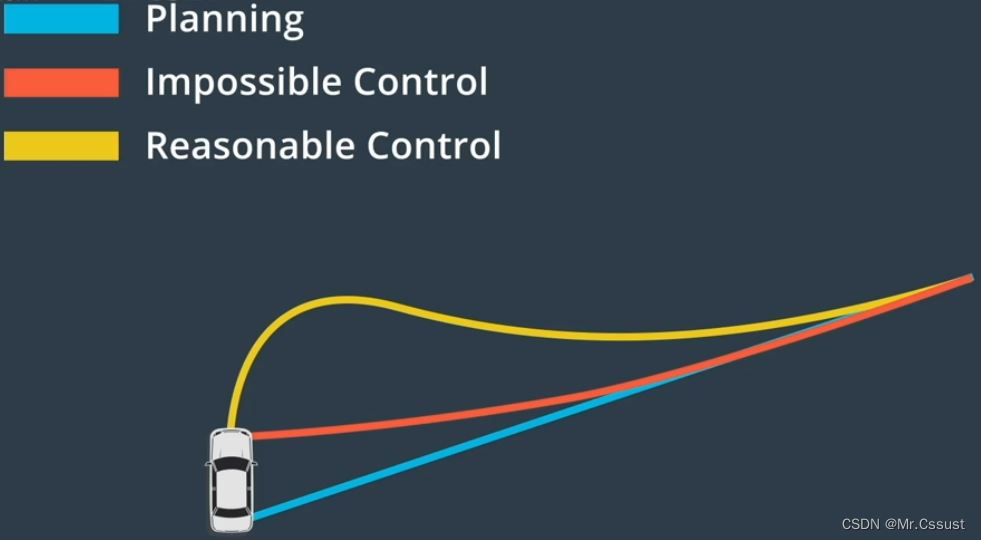
控制器设计
控制器设计目标:使车辆行驶的轨迹尽可能贴近Planning层规划的轨迹,如下图所示:

控制器的输入信息:Planning层计算出来的行驶路线,由一系列轨迹点组成,如下图所示:

控制的执行器:加速、制动、转向,如下图所示:

可行性约束:所有物理量的值不能突变,如下图所示:
平稳度约束:速度尽可能稳定,方向尽可能稳定,如下图所示:

实现上述控制器设计,常见的算法有三种:PID、LQR、MPC。
比例积分微分控制
PID(Proportional Integral Derivative Control),比例积分微分控制,这种算法比较常见,也很典型,本文不做过多介绍。
线性二次调节器
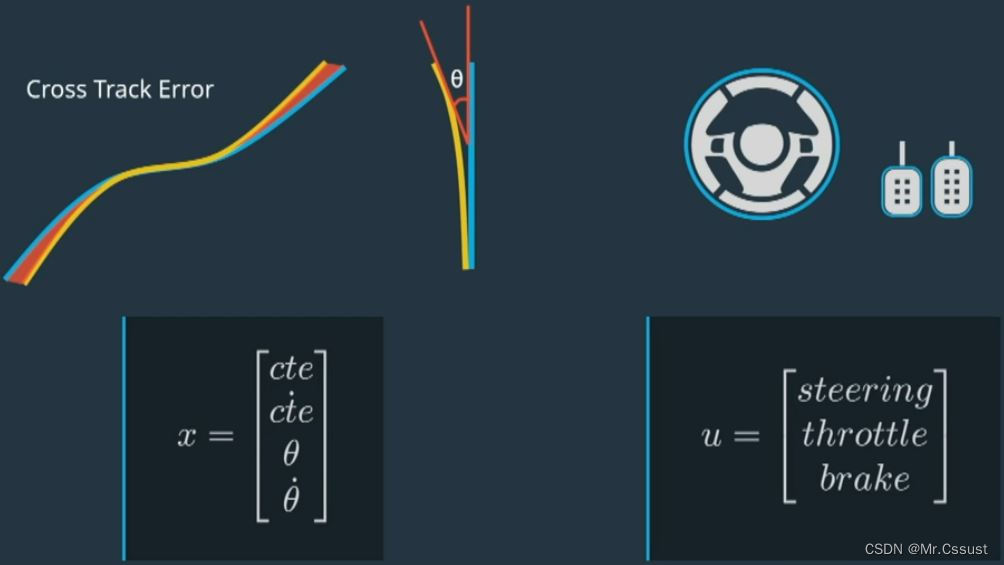
LQR(Linear Quadratic Regulator),线性二次调节器其中的L是指被控对象的状态与控制变量之间是线性关系,Q是指在求解最优参数时为保证绝对值之和最小引入了一个2次方。本文以车辆的横向控制为例介绍LQR的基本思路。
如下图所示,车辆的状态向量x包括:横向偏移量cte、cte变化率、朝向交偏移量θ、θ变化率,控制车辆的执行器包括:转型、加速、制动。x和u之间是线性的关系。
控制器设计目标是让x逼近零,实现这个目标的同时也要求投入尽可能少的成本,即u的变化量可能小,所以这里引入控制成本函数如下公式,其中的Q和R是一对权重比例系数。

因为x中有正有负,为了在cost求极值时方便一些,引入了他们的2次方,并设置了向量各个部分的权重比例系数,如下公式:
![]()
对cost函数求极值,当cost最小时,得到u和x之间的关系式如下:
![]()
这里K即要设计的控制器,是一个很复杂的函数。
模型预测控制
MPC(Model Predictive Control),模型预测控制的不步骤如下:
1)建立车辆模型;
2)监测当前的车辆状态;
3)通过该模型计算,车辆从当前状态进入下一个目标状态,需要输出的u;
4)车辆执行这个u;
5)监测新的车辆状态,重复2)到4)的步骤,过程期间适时优化1)中的车辆模型
Tips
PID通常用于纵向的速度控制
LQR通常用于横向的方向控制
MPC通常只用于学术研究
总结
以上就是本人在学习自动驾驶时,对所学课程的一些梳理和总结。后续还会分享另更多自动驾驶相关知识,欢迎评论区留言、点赞、收藏和关注,这些鼓励和支持都将成文本人持续分享的动力。
另外,如果有同在小伙伴,也正在学习或打算学习自动驾驶时,可以和我一同抱团学习,交流技术。
版权声明,原创文章,转载和引用请注明出处和链接,侵权必究!
文中部分图片来源自网络,若有侵权,联系立删。
相关文章:

自动驾驶学习笔记(九)——车辆控制
#Apollo开发者# 学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门 《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录 前言 控制器设计 比例积分微分控制 线性…...
HTML5学习系列之项目实战1
HTML5学习系列之项目实战1 前言代码记录问题总结 前言 学习记录 代码 <div id"player"><audio id"musicbox"></audio><div id"controls" class"clearfix controls"><div id"play" class"…...
git 提交成了LFS格式,如何恢复
平常习惯使用sourceTree提交代码,某次打开时弹出了一个【是否要使用LFS提交】的确认弹窗,当时不知道LFS是什么就点了确认,后续提交时代码全变成了这个样子 因为是初始化的项目首次提交,将近四百个文件全被格式化成了这个样子&…...
【ISP图像处理】Demosaic去马赛克概念介绍以及相关方法整理
1. 基本定义 使用彩色滤光器阵列(CFA)的数码相机需要一个去马赛克程序来形成完整的RGB图像。一般的相机传感器都是采用彩色滤光片阵列(CFA)放置在光感测单元上,在每个像素处仅捕获三种原色成分中的一种。 去马赛克方法主要关注于复原非常规区域,比如边缘…...

单图像3D重建AI算法综述【2023】
计算机视觉是人工智能的一个快速发展的领域,特别是在 3D 领域。 本概述将考虑一个应用任务:2D 和 3D 环境之间的转换。 在线工具推荐: Three.js AI纹理开发包 - YOLO合成数据生成器 - GLTF/GLB在线编辑 - 3D模型格式在线转换 - 可编程3D场景编…...

three.js相机调用reset方法复原但无法完全复原
目录 一、问题 二、原因 三、总结 一、问题 需求:经过多次旋转、平移等变换后,希望恢复到初次渲染的角度、位置。结果发现: three.js oribtControls调用 一次reset方法 无法完全复原;需要多次调用后才能复原。 this.orbitControls.reset…...
前端为什么要工程化
前端为什么要工程化 文章目录 前端为什么要工程化传统开发的弊端一个常见的案例更多问题 工程化带来的优势开发层面的优势团队协作的优势统一的项目结构统一的代码风格可复用的模块和组件代码健壮性有保障团队开发效率高 求职竞争上的优势 现在前端的工作与以前的前端开发已经完…...

软件测试/测试开发/人工智能丨视觉与图像识别自动化测试
视觉与图像识别在软件自动化测试领域中的应用是越来越重要的一项技术,它使得测试可以更全面、准确地模拟用户对图形用户界面(GUI)的交互。以下是视觉与图像识别在软件自动化测试中的主要应用: 1. 自动化 GUI 测试 视觉与图像识别…...
nvm的下载与使用
1.如果已经安装nodejs , 先卸载nodejs; 从控制面板中 卸载程序 卸载nodejs win r打开cmd ,管理员运行 where node 查看是否删除干净nodejs 2.下载nvm 从github 下载nvm , 下载nvm 3.nvm 和node安装路径最好写在同一个路径下 ,如D盘 ,D\a\nvm , D\a\nodejs 4.…...

拼多多官方开放平台接口app商品详情接口获取实时商品详情数据演示
拼多多开放平台提供了一种名为“商品详情接口”的API接口,它允许卖家从自己的系统中快速获取商品信息,如商品标题、描述、价格、库存等,并将这些信息展示在自己的店铺中。通过该接口,卖家可以更好地管理自己的商品库存和销售&…...

STM32F4系列单片机GPIO概述和寄存器分析
第2章 STM32-GPIO口 2.1 GPIO口概述 通用输入/输出口 2.1.1 GPIO口作用 GPIO是单片机与外界进行数据交流的窗口。 2.1.2 STM32的GPIO口 在51单片机中,IO口,以数字进行分组(P0~P3),每一组里面又有8个IO口。 在ST…...
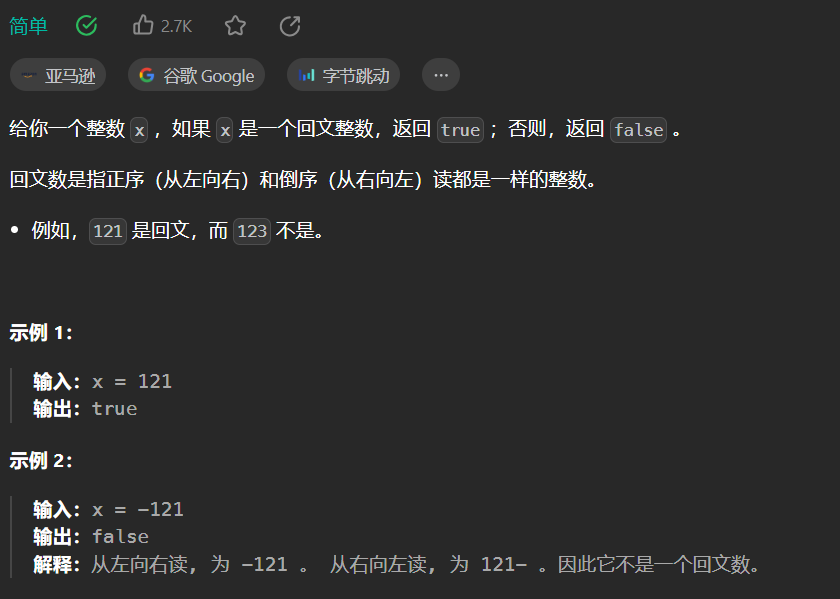
【LeetCode刷题】--9.回文数
9.回文数 class Solution {public boolean isPalindrome(int x) {if(x < 0){return false;}int tmp x, sum 0;boolean flag false;while(x ! 0){sum sum * 10 x % 10;x / 10;}if(sum tmp){flag true;}return flag;} }...

大数据-之LibrA数据库系统告警处理(ALM-12057 元数据未配置周期备份到第三方服务器的任务)
告警解释 系统安装完成后会检查元数据是否有周期备份到第三方服务器的任务,然后每1小时会检查一次。如果元数据未配置周期备份到第三方服务器的任务,将发送严重告警。 在用户创建元数据周期备份到第三方服务器的任务后,告警消除。 告警属性…...

毅速丨嫁接打印在模具制造中应用广泛
在模具行业中,3D打印随形水路已经被广泛认可,它可以提高冷却效率,从而提高产品良率。然而,全打印模具制造的成本相对较高,因为需要使用金属3D打印机和专用材料。为了节省打印成本,同时利用3D打印的优势&…...

『亚马逊云科技产品测评』活动征文|基于next.js搭建一个企业官网
『亚马逊云科技产品测评』活动征文|基于next.js搭建一个企业官网 授权声明:本篇文章授权活动官方亚马逊云科技文章转发、改写权,包括不限于在 Developer Centre, 知乎,自媒体平台,第三方开发者媒体等亚马逊云科技官方…...

C# Winform围棋棋盘
C# Winform简单的围棋棋盘vs2008winform小游戏C#vs2010winform棋盘C#窗体小游戏 这是一个简单的围棋棋盘小游戏,使用C# Winform编写棋盘界面,玩家可以在空白的交叉点上下棋子 项目获取: 项目获取:typora: typora/img (gitee.co…...

vue使用本地图片设置为默认图
一、引用 import imgSrc /assets/common/image/xxx.png 二、赋值给变量 defaultImg:imgSrc, 三、将变量给img标签 <img :src"defaultImg:imgSrc" alt"icon"> 注意:这里直接使用路径给变量是无法实现的哟...

day17-高速缓冲区的管理机制
1.目的 用户与磁盘进行文件交互时的流程 磁盘与高速缓冲区的关系 加深块设备驱动的理解 hash 循环链表 单链表的使用方法 2.高速缓冲区的工作流程 高速缓冲区中存储这对应的块设备驱动的数据 当从块设备中读取数据的时候,OS首先会从高速缓冲区中进行检索࿰…...

文心一言 VS 讯飞星火 VS chatgpt (139)-- 算法导论11.4 3题
三、用go语言,考虑一个采用均匀散列的开放寻址散列表。当装载因子为 3/4 和 7/8 时,试分别给出一次不成功查找和一次成功查找的探查期望数上界。 文心一言: 在开放寻址法中,当散列表的装载因子超过其阈值时,会触发重…...
Java 解压文件
maven库: <!--FileUtil、ZipUtil 依赖--> <dependency><groupId>cn.hutool</groupId><artifactId>hutool-all</artifactId><version>5.3.1</version> </dependency><!--IOUtils 依赖--> <depen…...

Quantum ESPRESSO 终极快速入门指南:5天轻松掌握电子结构计算
Quantum ESPRESSO 终极快速入门指南:5天轻松掌握电子结构计算 【免费下载链接】q-e Mirror of the Quantum ESPRESSO repository. Please do not post Issues or pull requests here. Use gitlab.com/QEF/q-e instead. 项目地址: https://gitcode.com/gh_mirrors/…...

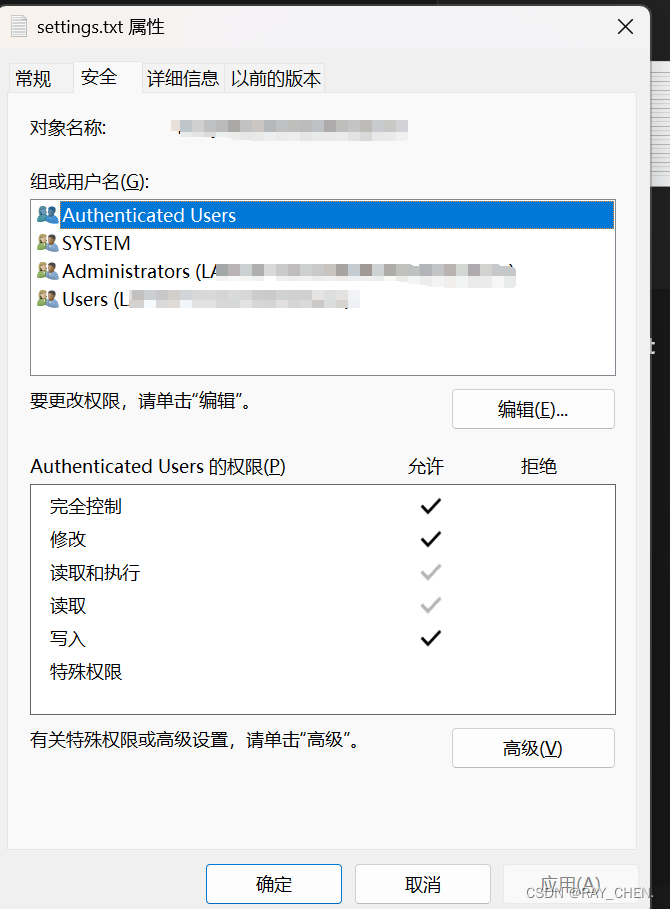
3大核心功能让Windows 11重获新生:Win11Debloat系统优化实战指南
3大核心功能让Windows 11重获新生:Win11Debloat系统优化实战指南 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes to declut…...

使用 Python 和 Taotoken 官方风格 SDK 实现你的第一个 AI 对话应用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用 Python 和 Taotoken 官方风格 SDK 实现你的第一个 AI 对话应用 对于刚开始接触大模型应用开发的 Python 程序员来说ÿ…...

告别手速焦虑:大麦抢票自动化系统全攻略
告别手速焦虑:大麦抢票自动化系统全攻略 【免费下载链接】ticket-purchase 大麦自动抢票,支持人员、城市、日期场次、价格选择 项目地址: https://gitcode.com/GitHub_Trending/ti/ticket-purchase 还在为抢不到演唱会门票而烦恼吗?每…...

别再乱用电容了!从稳压芯片电路入手,搞懂电解电容和贴片电容到底该怎么搭配
电解电容与贴片电容的黄金组合:稳压电路设计实战解析 在电子电路设计中,稳压芯片的输入输出端常见一大一小两个电容并联的经典配置,这种设计看似简单却蕴含着深刻的电路原理。对于刚入行的硬件工程师或电子爱好者来说,理解这种组…...

终极Python SECS/GEM协议实现:5分钟构建半导体设备通信系统
终极Python SECS/GEM协议实现:5分钟构建半导体设备通信系统 【免费下载链接】secsgem Simple Python SECS/GEM implementation 项目地址: https://gitcode.com/gh_mirrors/se/secsgem secsgem是一个专为半导体制造行业设计的Python SECS/GEM协议实现库&#…...
)
用Vector2.Lerp、MoveTowards和SmoothDamp搞定Unity 2D物体平滑移动(附性能对比)
Unity 2D平滑移动实战:Vector2.Lerp vs MoveTowards vs SmoothDamp 在2D游戏开发中,角色的移动效果直接影响玩家的操作体验。一个生硬的位移会破坏游戏沉浸感,而恰到好处的缓动则能让操作手感提升一个档次。Unity提供了三种核心方法来实现2D平…...

如何高效管理动物森友会存档:NHSE完整使用指南
如何高效管理动物森友会存档:NHSE完整使用指南 【免费下载链接】NHSE Animal Crossing: New Horizons save editor 项目地址: https://gitcode.com/gh_mirrors/nh/NHSE NHSE(Animal Crossing: New Horizons Save Editor)是一款专为《动…...

基于 Vibe Coding 的 OJ 平台
基于 Vibe Coding 的 OJ 平台 Github: https://github.com/wjlwjlwjlwjl-cmd/vibe-coding-based-oj-platform Gitee: https://gitee.com/wangs-joyful-home/vibe-coding-based-oj-platform 一个类 LeetCode 的在线编程评测平台,支持题目管理、代码提交、自动判题、提…...

树莓派4B部署YOLOv8保姆级避坑指南:从PyTorch版本选择到模型推理全流程
树莓派4B部署YOLOv8实战手册:从版本适配到高效推理的深度解析 引言 在嵌入式设备上部署现代计算机视觉模型,就像给一辆微型赛车装上F1引擎——潜力巨大但挑战重重。最近帮朋友在树莓派4B上部署YOLOv8时,我们花了三天时间才走出"依赖地狱…...