传递函数的推导和理解
传递函数的推导和理解
假设有一个线性系统,在一般情况下,它的激励 x ( t ) x(t) x(t)与响应 y ( t ) y(t) y(t)所满足的的关系,可用下列微分方程来表示:
a n y ( n ) + a n − 1 y ( n − 1 ) + a n − 2 y ( n − 2 ) + ⋯ + a 1 y ′ + a 0 y = b m x ( m ) + b m − 1 x ( m − 1 ) + b m − 2 x ( m − 2 ) + ⋯ + b 1 x ′ + b 0 x (1) \begin{array}{l}{a_n}{y^{(n)}} + {a_{n - 1}}{y^{(n - 1)}} + {a_{n - 2}}{y^{(n - 2)}} + \cdots + {a_1}y' + {a_0}y\\ = {b_m}{x^{({\rm{m}})}} + {b_{m - 1}}{x^{({\rm{m - 1}})}} + {b_{m - 2}}{x^{({\rm{m - 2}})}} + \cdots + {b_1}x' + {b_0}x\end{array}\tag1 any(n)+an−1y(n−1)+an−2y(n−2)+⋯+a1y′+a0y=bmx(m)+bm−1x(m−1)+bm−2x(m−2)+⋯+b1x′+b0x(1)
其中, a 0 , a 1 , ⋯ , a n , b 0 , b 1 , ⋯ , b m {a_0},{a_1}, \cdots ,{a_n},{b_0},{b_1}, \cdots ,{b_m} a0,a1,⋯,an,b0,b1,⋯,bm均为常数, m , n m,n m,n为正整数, n ≥ m n \ge m n≥m
设 L [ y ( t ) ] = Y ( s ) , L [ x ( t ) ] = X ( s ) \mathscr{L}[y(t)]=Y(s),\mathscr{L}[x(t)]=X(s) L[y(t)]=Y(s),L[x(t)]=X(s),根据Laplace变换的微分性质,有
L [ a k y ( k ) ] = a k s k Y ( s ) − a k [ s k − 1 y ( 0 ) + s k − 2 y ′ ( 0 ) + s k − 3 y ′ ′ ( 0 ) + ⋯ + s k − ( k − 1 ) y ( k − 2 ) ( 0 ) + s 0 y ( k − 1 ) ( 0 ) ] ( k = 0 , 1 , 2 , ⋯ , n ) {\mathscr L}[{a_k}{y^{(k)}}] = {a_k}{s^k}Y(s) - {a_k}[{s^{k - 1}}y(0) + {s^{k - 2}}y'(0) + {s^{k - 3}}y''(0) + \cdots + {s^{k - (k - 1)}}{y^{(k - 2)}}(0) + {s^0}{y^{(k - 1)}}(0)]\\(k = 0,1,2, \cdots ,n) L[aky(k)]=akskY(s)−ak[sk−1y(0)+sk−2y′(0)+sk−3y′′(0)+⋯+sk−(k−1)y(k−2)(0)+s0y(k−1)(0)](k=0,1,2,⋯,n)
L [ b k x ( k ) ] = b k s k X ( s ) − b k [ s k − 1 x ( 0 ) + s k − 2 x ′ ( 0 ) + s k − 3 x ′ ′ ( 0 ) + ⋯ + s k − ( k − 1 ) x ( k − 2 ) ( 0 ) + s 0 x ( k − 1 ) ( 0 ) ] ( k = 0 , 1 , 2 , ⋯ , m ) {\mathscr L}[{b_k}{x^{(k)}}] = {b_k}{s^k}X(s) - {b_k}[{s^{k - 1}}x(0) + {s^{k - 2}}x'(0) + {s^{k - 3}}x''(0) + \cdots + {s^{k - (k - 1)}}{x^{(k - 2)}}(0) + {s^0}{x^{(k - 1)}}(0)] \\(k = 0,1,2, \cdots ,m) L[bkx(k)]=bkskX(s)−bk[sk−1x(0)+sk−2x′(0)+sk−3x′′(0)+⋯+sk−(k−1)x(k−2)(0)+s0x(k−1)(0)](k=0,1,2,⋯,m)
对式子(1)两边进行Laplace变换并通过整理,可得:
D ( s ) Y ( s ) − M h y ( s ) = M ( s ) X ( s ) − M h x ( s ) D(s)Y(s) - {M_{hy}}(s) = M(s)X(s) - {M_{hx}}(s) D(s)Y(s)−Mhy(s)=M(s)X(s)−Mhx(s)
即:
Y ( s ) = M ( s ) D ( s ) X ( s ) + M h y ( s ) − M h x ( s ) D ( s ) (2) Y(s) = \frac{{M(s)}}{{D(s)}}X(s) + \frac{{{M_{hy}}(s) - {M_{hx}}(s)}}{{D(s)}}\tag2 Y(s)=D(s)M(s)X(s)+D(s)Mhy(s)−Mhx(s)(2)
其中,
D ( s ) = a n s n + a n − 1 s n − 1 + ⋯ + a 1 s + a 0 , D(s) = {a_n}{s^n} + {a_{n - 1}}{s^{n - 1}} + \cdots + {a_1}s + {a_0}, D(s)=ansn+an−1sn−1+⋯+a1s+a0,
M ( s ) = b m s m + b m − 1 s m − 1 + ⋯ + b 1 s + b 0 , M(s) = {b_m}{s^m} + {b_{m - 1}}{s^{m - 1}} + \cdots + {b_1}s + {b_0}, M(s)=bmsm+bm−1sm−1+⋯+b1s+b0,
M h y ( s ) = a n y ( 0 ) s n − 1 + [ a n y ′ ( 0 ) + a n − 1 y ( 0 ) ] s n − 2 + [ a n y ′ ′ ( 0 ) + a n − 1 y ′ ( 0 ) + a n − 2 y ( 0 ) ] s n − 3 + ⋯ + [ a n y ( n − 2 ) ( 0 ) + a n − 1 y ( n − 3 ) ( 0 ) + ⋯ + a 2 y ( 0 ) ] s + [ a n y ( n − 1 ) ( 0 ) + a n − 1 y ( n − 2 ) ( 0 ) + ⋯ + a 1 y ( 0 ) ] , {M_{hy}}(s) = {a_n}y(0){s^{n - 1}} + [{a_n}y'(0) + {a_{n - 1}}y(0)]{s^{n - 2}} + [{a_n}y''(0) + {a_{n - 1}}y'(0) + {a_{n - 2}}y(0)]{s^{n - 3}} + \cdots + [{a_n}{y^{(n - 2)}}(0) + {a_{n - 1}}{y^{(n - 3)}}(0) + \cdots + {a_2}y(0)]s + [{a_n}{y^{(n - 1)}}(0) + {a_{n - 1}}{y^{(n - 2)}}(0) + \cdots + {a_1}y(0)], Mhy(s)=any(0)sn−1+[any′(0)+an−1y(0)]sn−2+[any′′(0)+an−1y′(0)+an−2y(0)]sn−3+⋯+[any(n−2)(0)+an−1y(n−3)(0)+⋯+a2y(0)]s+[any(n−1)(0)+an−1y(n−2)(0)+⋯+a1y(0)],
M h x ( s ) = b m x ( 0 ) s m − 1 + [ b m x ′ ( 0 ) + b m − 1 x ( 0 ) ] s m − 2 + [ b m x ′ ′ ( 0 ) + b m − 1 x ′ ( 0 ) + b m − 2 x ( 0 ) ] s m − 3 + ⋯ + [ b m x ( m − 2 ) ( 0 ) + b m − 1 x ( m − 3 ) ( 0 ) + ⋯ + b 2 x ( 0 ) ] s + [ b m x ( m − 1 ) ( 0 ) + b m − 1 x ( n − 2 ) ( 0 ) + ⋯ + b 1 x ( 0 ) ] , {M_{hx}}(s) = {b_m}x(0){s^{m - 1}} + [{b_m}x'(0) + {b_{m - 1}}x(0)]{s^{m - 2}} + [{b_m}x''(0) + {b_{m - 1}}x'(0) + {b_{m - 2}}x(0)]{s^{m - 3}} + \cdots + [{b_m}{x^{(m - 2)}}(0) + {b_{m - 1}}{x^{(m - 3)}}(0) + \cdots + {b_2}x(0)]s + [{b_m}{x^{(m - 1)}}(0) + {b_{m - 1}}{x^{(n - 2)}}(0) + \cdots + {b_1}x(0)], Mhx(s)=bmx(0)sm−1+[bmx′(0)+bm−1x(0)]sm−2+[bmx′′(0)+bm−1x′(0)+bm−2x(0)]sm−3+⋯+[bmx(m−2)(0)+bm−1x(m−3)(0)+⋯+b2x(0)]s+[bmx(m−1)(0)+bm−1x(n−2)(0)+⋯+b1x(0)],
若令 G ( s ) = M ( s ) G ( s ) G(s) = \frac{{M(s)}}{{G(s)}} G(s)=G(s)M(s), G h ( s ) = M h y ( s ) − M h x ( s ) D ( s ) {G_h}(s) = \frac{{{M_{hy}}(s) - {M_{hx}}(s)}}{{D(s)}} Gh(s)=D(s)Mhy(s)−Mhx(s),则式(2)可写为:
Y ( s ) = G ( s ) X ( s ) + G h ( s ) (3) Y(s) = G(s)X(s) + {G_h}(s)\tag3 Y(s)=G(s)X(s)+Gh(s)(3)
式子中:
G ( s ) = b m s m + b m − 1 s m − 1 + ⋯ + b 1 s + b 0 a n s n + a n − 1 s n − 1 + ⋯ + a 1 s + a 0 (4) G(s) = \frac{{{b_m}{s^m} + {b_{m - 1}}{s^{m - 1}} + \cdots + {b_1}s + {b_0}}}{{{a_n}{s^n} + {a_{n - 1}}{s^{n - 1}} + \cdots + {a_1}s + {a_0}}}\tag4 G(s)=ansn+an−1sn−1+⋯+a1s+a0bmsm+bm−1sm−1+⋯+b1s+b0(4)
我们称 G ( s ) G(s) G(s)为系统的传递函数。它表达了系统本身的特性,而与激励及系统的初始状态无关。
但是 G h ( s ) G_{h}(s) Gh(s)则由激励和系统本身的初值条件所决定。若这些初始条件全为0,即 G h ( s ) G_{h}(s) Gh(s)=0时,式子(3)可写成:
Y ( s ) = G ( s ) X ( s ) 或 G ( s ) = Y ( s ) X ( s ) (5) \begin{array}{l}Y(s) = G(s)X(s) 或 G(s) = \frac{{Y(s)}}{{X(s)}}\end{array}\tag5 Y(s)=G(s)X(s)或G(s)=X(s)Y(s)(5)
式子(5)表明,在零初值条件下,系统的传递函数等于其响应的Laplace变换与其激励的Laplace变换之比。
因此,当我们知道系统的传递函数后,就可以由系统的激励按照式子(3)或式子(5)求出其响应的拉普拉斯变换 Y ( s ) Y(s) Y(s),再通过求逆变换可得其响应 y ( t ) y(t) y(t)。
系统的激励 x ( t ) x(t) x(t),系统的响应 y ( t ) y(t) y(t),以及它们的拉普拉斯变换 X ( s ) X(s) X(s), Y ( s ) Y(s) Y(s)和传递函数的关系如图1所示。
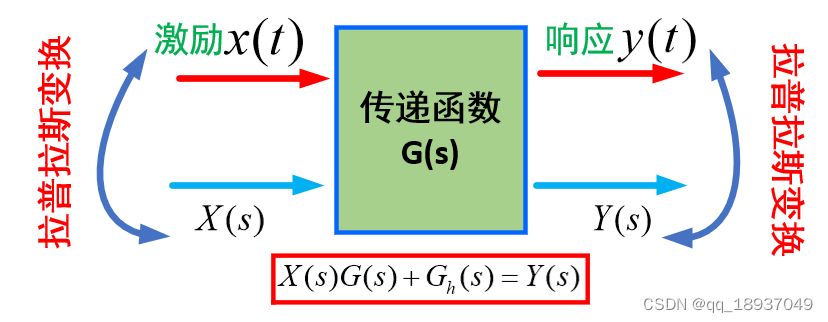
图1 系统激励、响应以及传递函数之间的关系
需要说明的是,传递函数不表明系统的物理性质。许多性质不同的物理系统,可以有相同的传递函数。而传递函数不同的物理系统,即使系统的激励相同,其响应也是不相同的,因此,对传递函数的分析和研究,就能统一处理各种物理性质不同的额线性系统。
简而言之,通过对系统微分方程进行拉普拉斯变换,推导出了系统的传递函数 G ( s ) G(s) G(s)。
相关文章:
传递函数的推导和理解
传递函数的推导和理解 假设有一个线性系统,在一般情况下,它的激励 x ( t ) x(t) x(t)与响应 y ( t ) y(t) y(t)所满足的的关系,可用下列微分方程来表示: a n y ( n ) a n − 1 y ( n − 1 ) a n − 2 y ( n − 2 ) ⋯ a 1 y…...
STM32 SPI
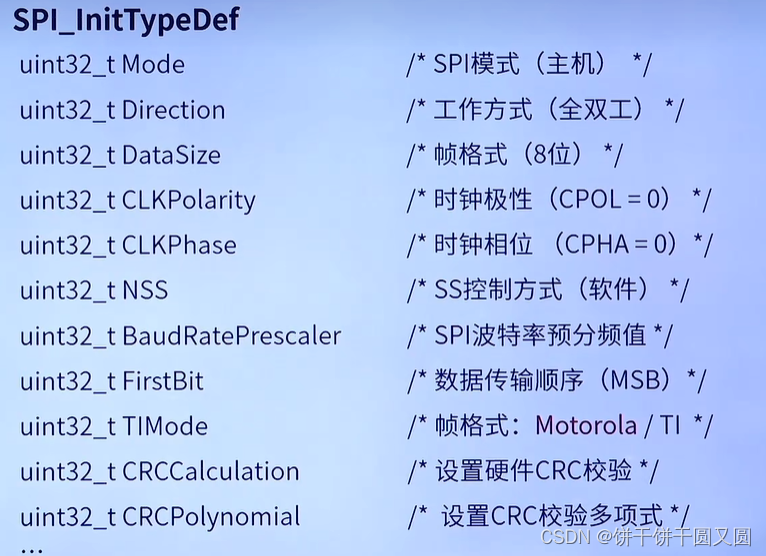
SPI介绍 SPI是Serial Pepheral interface缩写,串行外围设备接口。 SPI接口是一种高速的全双工同步通信总线,已经广泛应用在众多MCU、存储芯片、AD转换器和LCD之间。大部分STM32有3个SPI接口,本实验使用的是SPI1。 SPI同一时刻既能发送数据&…...

Linux系统编程 day02 vim、gcc、库的制作与使用
Linux系统编程 day02 vim、gcc、库的制作与使用 01. vim0101. 命令模式下的操作0102. 切换到文本输入模式0103. 末行模式下的操作0104. vim的配置文件 02. gcc03. 库的制作与使用0301. 静态库的制作与使用0302. 动态库(共享库)的制作与使用 01. vim vim是一个编辑器࿰…...
Mistral 7B 比Llama 2更好的开源大模型 (四)
Mistral 7B在平衡高性能和保持大型语言模型高效的目标方面迈出了重要的一步。通过我们的工作,我们的目标是帮助社区创建更实惠、更高效、更高性能的语言模型,这些模型可以在广泛的现实世界应用程序中使用。 Mistral 7B在实践中,对于16K和W=4096的序列长度,对FlashAttentio…...

相似基因序列问题 ——查找
【题目背景】 生物的遗传物质存在个体间或种群水平的差异,这样的差异被称为遗传变异。突变及基因重组等因素都会导致遗传变异。尽管亲代在将其遗传信息传递给子代时会发生遗传变异,但是这些遗传变异仅占遗传物质的一小部分,通常亲代和子代之…...
【汇编】“转移”综述、操作符offset、jmp指令
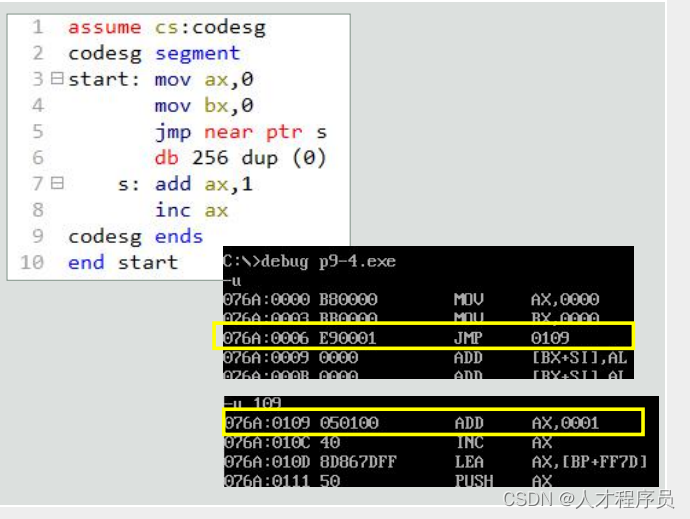
文章目录 前言一、转移综述1.1 :背景:1.2 转移指令1.3 转移指令的分类按转移行为根据指令对IP修改的范围不同 二、操作符offset2.1 offset操作符是干什么的?标号是什么? 2.2 nop是什么? 三、jmp指令3.1 jmp指令的功能3.2 jmp指令&…...
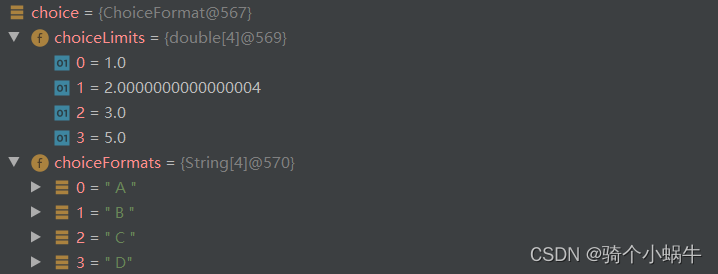
Java格式化类Format
文章目录 Format介绍Format方法- format(格式化)- parseObject(解析) 格式化分类日期时间格式化1. DateFormat常用方法getInstancegetDateInstancegetTimeInstancegetDateTimeInstance 方法入参styleLocale 2. SimpleDateFormat常…...

力扣每日一题-美化数组的最少删除数-2023.11.21
力扣每日一题:美化数组的最少删除数 开篇 今天的力扣每日一题居然写出来了,好开心,迫不及待地把题目分享出来,希望你也能把它狠狠拿下。 题目链接: 2216.美化数组的最少删除数 题目描述 代码思路 创建一个list集合来保存数组&a…...
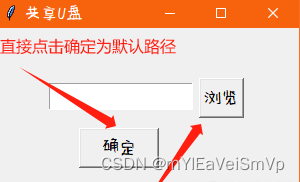
【练习】检测U盘并自动复制内容到电脑的软件
软件作用: 有U盘插在电脑上后,程序会检测到U盘的路径。 自己可以提前设置一个保存复制文件的路径或者使用为默认保存的复制路径(默认为桌面,可自行修改)。 检测到U盘后程序就会把U盘的文件复制到电脑对应的…...
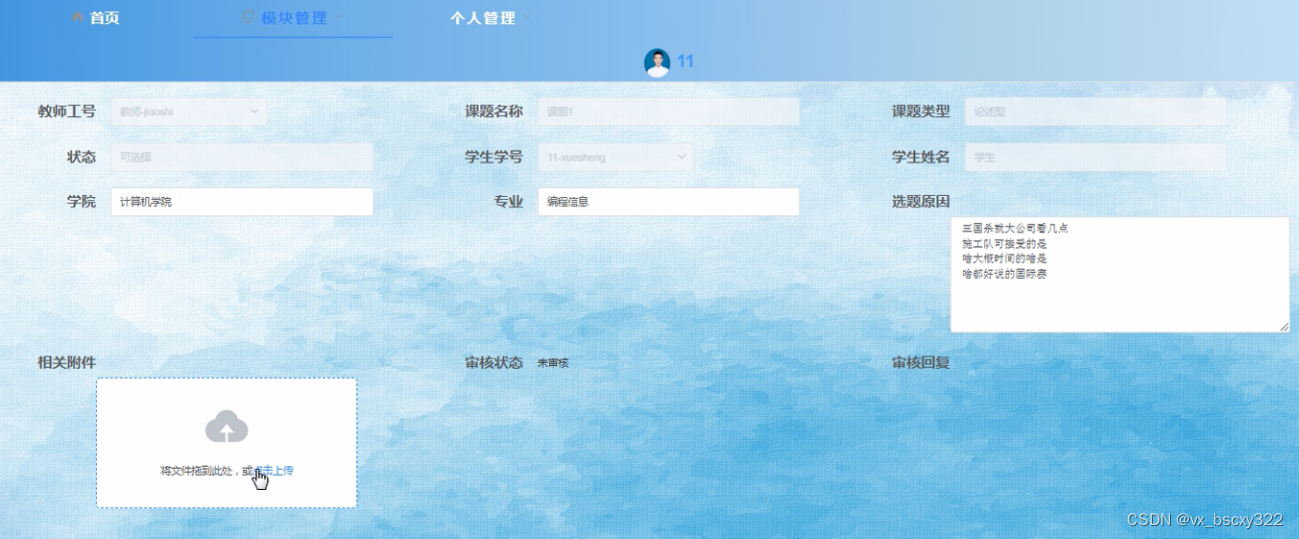
【计算机毕业设计】Springboot高校论文管理系统 -96280,免费送源码,【开题选题+程序定制+论文书写+答辩ppt书写-原创定制程序】
SpringBoot论文管理系统 摘 要 随着科学技术的飞速发展,社会的方方面面、各行各业都在努力与现代的先进技术接轨,通过科技手段来提高自身的优势,高校当然也不例外。论文管理系统是以实际运用为开发背景,运用软件工程原理和开发方…...

nginx 代理接口报404 问题排查
今天遇到一个nginx代理后端接口请求报404的问题,问题是这样的,后端由于服务器没有环境,但是需要和前端联调,于是采用cpolar内网穿透的方式,穿出来了。但是前端请求跨域,于是前端用nginx代理了一下后端接口&…...

JVM 调优指南
文章目录 为什么要学 JVM一、JVM 整体布局二、Class 文件规范三、类加载模块四、执行引擎五、GC 垃圾回收1 、JVM内存布局2 、 JVM 有哪些主要的垃圾回收器?3 、分代垃圾回收工作机制 六、对 JVM 进行调优的基础思路七、 GC 情况分析实例 JVM调优指南 -- 楼兰 JV…...

澳洲猫罐头如何?我亲自喂养过的优质猫罐头分享
猫罐头要符合三点:营养配方完整均衡、原料新鲜优质、生产工艺科学可靠。只有具备这些特点,才是品质上乘的猫罐头。 猫罐头的三个要素,一个都不能少。配方不均衡,营养就不足;原料不新鲜,生产出来的猫罐头就…...

CISP练习测试题
免责声明 文章仅做经验分享用途,切勿当真,未授权的攻击属于非法行为!利用本文章所提供的信息而造成的任何直接或者间接的后果及损失,均由使用者本人负责,作者不为此承担任何责任,一旦造成后果请自行承担!!! 某公司准备在业务环境中部署一种新的计算机产品,下列哪一项…...
2023下半年软件设计师考试知识点大全思维导图
软件设计师考试知识点大全思维导图 2023年下半年第一次机考 复习资料 以上是我在学习过程中根据自己的知识结构的特点及刷到的考题 做的导图,有需要的可以留言发原版的 mmap格式文件 方便自己拓展. 软考资料 这是网上找的资料 汇总免费放在这里 吧
[C++ 从入门到精通] 12.重载运算符、赋值运算符重载、析构函数
📢博客主页:https://loewen.blog.csdn.net📢欢迎点赞 👍 收藏 ⭐留言 📝 如有错误敬请指正!📢本文由 丶布布原创,首发于 CSDN,转载注明出处🙉📢现…...

Android Binder 跨进程通信的优势是什么
Android Binder 跨进程通信的优势是什么 Android Binder 是 Android 系统中用于实现跨进程通信的底层机制,具有以下优势: 高效性:Android Binder 使用共享内存技术,在进程间传递数据时不需要进行数据拷贝,从而提高了传…...

HashMap的详细解读
HashMap是Java语言中的一个重要数据结构,它实现了Map接口,允许我们存储键值对,并且可以根据键直接访问对应的值。 特性 键值对存储:HashMap存储的是键值对数据,可以方便的通过键来获取值。无序:HashMap中…...

10个好用的Mac数据恢复软件推荐—恢复率高达99%
如果您正在寻找最好的 Mac 数据恢复软件来检索意外删除或丢失的文件,那么这里就是您的最佳选择。 我们理解,当您找不到 Mac 计算机或外部驱动器上保存的一些重要文件时,会感到多么沮丧和绝望。这些文件非常珍贵,无论出于何种原因…...
EtherCAT从站EEPROM分类附加信息详解:RXPDO(输入过程数据对象)
0 工具准备 1.EtherCAT从站EEPROM数据(本文使用DE3E-556步进电机驱动器)1 分类附加信息——RXPDO(输入过程数据对象) 1.1 分类附加信息规范 在EEPROM字64开始的区域存储的是分类附加信息,这里存储了包括设备信息、SM配置、FMMU配置在内的诸多信息。每个信息在一段连续的…...

Arm服务器架构设计:虚拟化与安全增强解析
1. Arm服务器基础架构设计哲学 现代Arm服务器架构的设计核心在于"硬件虚拟化优先"理念。与传统x86架构渐进式添加虚拟化功能不同,Armv8/v9架构从设计之初就将虚拟化支持作为基础能力。这种设计哲学在SBSA(Server Base System Architecture&…...

PlayCover完整指南:在Apple Silicon Mac上运行iOS应用与游戏的终极解决方案
PlayCover完整指南:在Apple Silicon Mac上运行iOS应用与游戏的终极解决方案 【免费下载链接】PlayCover Community fork of PlayCover 项目地址: https://gitcode.com/gh_mirrors/pl/PlayCover PlayCover是一个革命性的开源工具,专门为Apple Sili…...

OpenCore Configurator:告别命令行,用图形界面轻松配置黑苹果引导
OpenCore Configurator:告别命令行,用图形界面轻松配置黑苹果引导 【免费下载链接】OpenCore-Configurator A configurator for the OpenCore Bootloader 项目地址: https://gitcode.com/gh_mirrors/op/OpenCore-Configurator 你是否曾为配置黑苹…...

从选题到终稿,百考通AI如何将你的本科论文写作变成一场“有攻略的通关之旅”
又到了一年毕业季,你是否也经历过这样的夜晚:宿舍已经熄灯,只有电脑屏幕的冷光照着你疲惫的双眼,文档里是导师第N版的批注,查重报告上红色标记随处可见,格式错误提示弹窗一个接一个——而距离终稿提交&…...

野火IM 1.4.7版本发布:新增多项Server API接口,附多版本升级注意事项
野火IM 1.4.7:新增接口拓展功能边界野火IM 1.4.7版本正式发布,带来了一系列功能更新。新增了获取所有机器人的Server API接口、获取某个电话号码的用户列表的Server API接口,还为机器人添加了根据邮箱获取用户信息和批量获取用户信息的接口。…...

仅限首批200家通过SITS2026容错认证的企业在用:AIAgent故障注入测试的8步标准化流程
更多请点击: https://intelliparadigm.com 第一章:SITS2026容错认证体系的演进逻辑与战略价值 SITS2026容错认证体系并非对传统安全模型的简单增强,而是面向高动态、强异构、多边协同数字基础设施所构建的第三代可信计算范式。其核心演进逻辑…...
)
大模型多维度评估体系构建指南:从SITS大会带回的4层漏斗式评估矩阵(含Prompt一致性校准模块)
更多请点击: https://intelliparadigm.com 第一章:大模型A/B测试方法:SITS大会 在2024年SITS(Scalable Intelligence Testing Summit)大会上,工业界首次系统性地提出了面向大语言模型的A/B测试新范式——*…...

AI提示词工程实战:结构化模板提升开发效率与代码质量
1. 项目概述:一个为开发者量身打造的AI提示词库如果你和我一样,每天都要和ChatGPT、Cursor、GitHub Copilot这些AI编程助手打交道,那你肯定也经历过这样的时刻:面对一个复杂的代码审查任务,或者一个棘手的性能优化问题…...

别做外卖代运营了:帮餐饮店处理差评,反而更容易月付
我是小杨,9年 Java 后端。 主业写系统,副业专门研究普通人今天就能开干的赚钱项目。 这个专栏只做一件事: 把一个赚钱思路,拆到你今天就能开始。 没有空话,只有4样东西: 我的判断 落地步骤 真实数据 踩坑记录 如果你看了几篇,觉得全是废话,那是我的问题。 这个专栏,…...

FramePack帧压缩技术解析:如何实现视频生成的恒定计算复杂度
FramePack帧压缩技术解析:如何实现视频生成的恒定计算复杂度 【免费下载链接】FramePack Lets make video diffusion practical! 项目地址: https://gitcode.com/gh_mirrors/fr/FramePack 在视频生成领域,传统方法面临着一个根本性挑战࿱…...