uvm白皮书练习_ch2_ch231_加入transaction
2.3 为验证平平台加入各种组件
uvm白皮书练习_ch2_ch231_加入transaction
代码部分
top_tb.sv
`timescale 1ns / 1ps
`include "uvm_macros.svh"import uvm_pkg::*;
/*只能现在*/`include "my_if.sv"
`include "my_transaction.sv"
`include "my_driver.sv"module top_tb();
/*time set*/
initial begin$display("start sim");#1.5ms;$finish;
end/*fsdb*/
initial begin$display("fsdbDumpfilrs is start at %d",$time);$fsdbDumpfile("verilog.fsdb");$fsdbDumpvars(0);
endreg clk;
reg rst_n;
reg [7:0] rxd;
reg rx_dv;
wire [7:0] txd;
wire tx_en;my_if input_if (clk,rst_n);
my_if output_if (clk,rst_n);initial beginclk = 0;forever begin#100ns clk = ~ clk;end
endinitial beginrst_n =1'b0 ;#1us;rst_n =1'b1 ;
enddut my_dut(.clk (clk ),.rst_n (rst_n ),.rxd (input_if.data ),.rx_dv (input_if.valid ),.txd (output_if.data ),.tx_en (output_if.valid ) );// initial begin
// my_driver drv;
// drv=new("drv",null);
// drv.main_phase(null);
// $finish;
// end
initial beginrun_test("my_driver");
endinitial beginuvm_config_db#(virtual my_if)::set(null, "uvm_test_top", "vif", input_if);
endendmodule
my_if.sv
`ifndef MY_IF__SV
`define MY_IF__SV
interface my_if(input clk,input rst_n);logic [7:0] data;logic valid;
endinterface //my_if`endif
my_transaction.sv
`ifndef MY_TRANSACTION__SV
`define MY_TRANSACTION__SVclass my_transaction extends uvm_sequence_item;rand bit[47:0] dmac;rand bit[47:0] smac;rand bit[15:0] ether_type;rand byte pload[];rand bit[31:0] crc;constraint pload_cons{pload.size >= 46;pload.size <= 1500;}function bit[31:0] calc_crc();return 32'h0;endfunctionfunction void post_randomize();crc = calc_crc;endfunction`uvm_object_utils(my_transaction)function new(string name = "my_transaction");super.new();endfunction
endclass
`endifmy_driver.sv
// `ifndef MY_DRIVER__SV
// `define MY_DRIVER__SV
// class my_driver extends uvm_driver;
// virtual my_if vif;
// `uvm_component_utils(my_driver) //没有后缀// function new(string name="my_driver",uvm_component parent = null);
// super.new(name,parent);
// `uvm_info("my_driver", "new is called", UVM_LOW)
// endfunction //new()// virtual function void build_phase(uvm_phase phase);
// super.build_phase(phase);
// `uvm_info("my_driver", "build phase is caslled", UVM_LOW)
// if(!uvm_config_db#(virtual my_if)::get(this, "", "vif", vif))
// `uvm_fatal("my_driver", "virtual interface must be set for vif!!!") //没有后缀
// endfunction// extern task main_phase(uvm_phase phase);
// extern task drive_one_pkt(my_transaction tr);// endclass //my_driver extends uvm_driver`ifndef MY_DRIVER__SV
`define MY_DRIVER__SV
class my_driver extends uvm_driver;virtual my_if vif;`uvm_component_utils(my_driver)function new(string name = "my_driver", uvm_component parent = null);super.new(name, parent);endfunctionvirtual function void build_phase(uvm_phase phase);super.build_phase(phase);if(!uvm_config_db#(virtual my_if)::get(this, "", "vif", vif))`uvm_fatal("my_driver", "virtual interface must be set for vif!!!")endfunctionextern task main_phase(uvm_phase phase);extern task drive_one_pkt(my_transaction tr);
endclasstask my_driver::main_phase (uvm_phase phase);my_transaction tr ; /*先声明数组*/phase.raise_objection(this); //有后缀,项目真起始点vif.data <= 8'b0; vif.valid <= 1'b0;//先来一个初始化while(!vif.rst_n)@(posedge vif.clk);for(int i = 0; i < 2; i++)begin //发两轮数据包tr = new("tr");// assert (tr.randomize() with {pload.size ==20;});//源码200,这里减到20,进行随机初始化assert (tr.randomize() with {pload.size ==50;});//源码200,这里减到20,进行随机初始化// else error_process //本来此处还有断言,源码处暂时没有drive_one_pkt(tr);endrepeat(5) @(posedge vif.clk);//等待5个时钟// vif.valid <= 1'b0;phase.drop_objection(this);//运行结束
endtask //my_driver::main_phasetask my_driver::drive_one_pkt(my_transaction tr);bit [47:0] tmp_data;bit [7:0] data_q[$]; //push dmac to data_qtmp_data = tr.dmac;for(int i = 0; i < 6; i++) begindata_q.push_back(tmp_data[7:0]);tmp_data = (tmp_data >> 8);end//push smac to data_qtmp_data = tr.smac;for(int i = 0; i < 6; i++) begindata_q.push_back(tmp_data[7:0]);tmp_data = (tmp_data >> 8);end//push ether_type to data_qtmp_data = tr.ether_type;for(int i = 0; i < 2; i++) begindata_q.push_back(tmp_data[7:0]);tmp_data = (tmp_data >> 8);end//push payload to data_qfor(int i = 0; i < tr.pload.size; i++) begindata_q.push_back(tr.pload[i]);end//push crc to data_qtmp_data = tr.crc;for(int i = 0; i < 4; i++) begindata_q.push_back(tmp_data[7:0]);tmp_data = (tmp_data >> 8);end`uvm_info("my_driver", "begin to drive one pkt", UVM_LOW);repeat(3) @(posedge vif.clk);while(data_q.size() > 0) begin@(posedge vif.clk);vif.valid <= 1'b1;vif.data <= data_q.pop_front(); end@(posedge vif.clk);vif.valid <= 1'b0;`uvm_info("my_driver", "end drive one pkt", UVM_LOW);
endtask`endif// /*
// 注册
// main phase// driver one pkt// */仿真结果
UVM_INFO @ 0: reporter [RNTST] Running test my_driver...
UVM_INFO my_driver.sv(100) @ 1100000: uvm_test_top [my_driver] begin to drive one pkt
UVM_INFO my_driver.sv(111) @ 15500000: uvm_test_top [my_driver] end drive one pkt
UVM_INFO my_driver.sv(100) @ 15500000: uvm_test_top [my_driver] begin to drive one pkt
UVM_INFO my_driver.sv(111) @ 29900000: uvm_test_top [my_driver] end drive one pkt--- UVM Report Summary ---** Report counts by severity
UVM_INFO : 5
UVM_WARNING : 0
UVM_ERROR : 0
UVM_FATAL : 0
** Report counts by id
[RNTST] 1
[my_driver] 4小结
Error-[CNST-CIF] Constraints inconsistency failure
my_driver.sv, 57Constraints are inconsistent and cannot be solved.Please check the inconsistent constraints being printed above and rewrite them.
约束超出预设范围,会导致失败
解决方法,使用范围内的数据值进行随机化
相关文章:
uvm白皮书练习_ch2_ch231_加入transaction
2.3 为验证平平台加入各种组件 uvm白皮书练习_ch2_ch231_加入transaction 代码部分 top_tb.sv timescale 1ns / 1ps include "uvm_macros.svh"import uvm_pkg::*; /*只能现在*/include "my_if.sv" include "my_transaction.sv" include "…...

python-泛型实现,类型检查
python-泛型实现,类型检查 泛型类型泛型类 在Python中,没有像Java中的泛型那样的明确语法来指定类型参数。Python是一种动态类型语言,可以灵活地处理不同类型的对象。 然而,如果你希望在Python中添加泛型的注释或提示,…...

黑马React18: Redux
黑马React: Redux Date: November 19, 2023 Sum: Redux基础、Redux工具、调试、美团案例 Redux介绍 Redux 是React最常用的集中状态管理工具,类似于Vue中的Pinia(Vuex),可以独立于框架运行 作用:通过集中管理的方式管…...

visionOS空间计算实战开发教程Day 5 纹理和材质
在Day 4中我们使用了ImmersiveSpace并在其中添加了一个立方体,但对这个立方体我们只配置了长宽高,并没有做进一步的操作。 本文中我们会通过纹理和材质对这个立方体的六个面分别进行不同的绘制。首先我们将ImmersiveView分拆…...
低代码PaaS开发平台
目录 一、低代码概念 低代码目的 低代码核心功能 二、PaaS平台 PaaS服务的低代码平台 1.私有化部署,为数据安全保驾护航 2.业内领先技术,为开发强势赋能 3.超强集成能力,系统对接无忧 4.源代码交付,实现二开自由 三、小结 一、低代…...

阿里云99元服务器ECS经济型e实例性能如何?测评来了
阿里云服务器优惠99元一年,配置为云服务器ECS经济型e实例,2核2G配置、3M固定带宽和40G ESSD Entry系统盘,CPU采用Intel Xeon Platinum架构处理器,2.5 GHz主频,3M带宽下载速度384KB/秒,上传速度1028KB/秒&am…...
vue3-生命周期
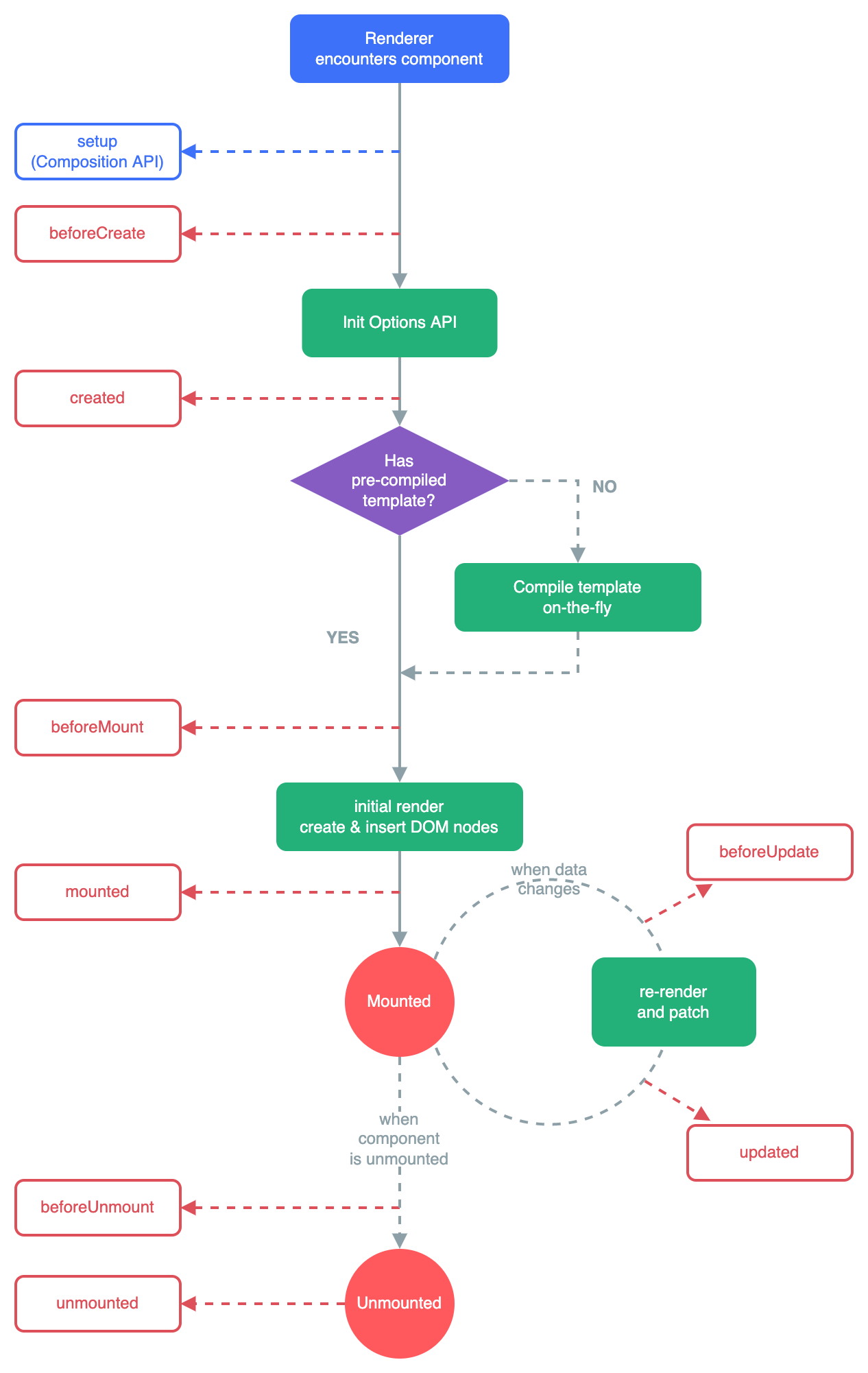
🌈个人主页:前端青山 🔥系列专栏:Vue篇 🔖人终将被年少不可得之物困其一生 依旧青山,本期给大家带来vue篇专栏内容:vue3-生命周期 目录 vue3生命周期 vue3生命周期钩子 1.1 onMounted() 1.2 onUpdated() 1.3 onU…...

23. 深度学习 - 多维向量自动求导
Hi, 你好。我是茶桁。 前面几节课中,我们从最初的理解神经网络,到讲解函数,多层神经网络,拓朴排序以及自动求导。 可以说,最难的部分已经过去了,这节课到了我们来收尾的阶段,没错,生…...
挺扎心!好不容易有了一个offer,就因为背调出之前有仲裁记录,offer黄了,这已经是第二次了!...
仲裁记录会影响之后求职吗? 最近有一位程序员向我们讲述了他的遭遇: 大环境不好,好不容易有了一个offer,却因为背调出跟之前公司有仲裁经历,offer黄了,这已经是第二次因为这个原因黄offer了。 他说自己快抑…...

【brpc学习实践四】异步请求案例详解
注意 使用的还是源码的案例,添加个人注解。在前面的篇章我们讲解了客户端、服务端rpc构造的基本流程及同步、异步的案例基础之后,再理解此案例就容易了。 想直接看案例实现请看: server端实现 client端实现 服务端要点概览 controller ser…...

git命令 cherry-pick
参考:https://blog.csdn.net/weixin_42585386/article/details/128256149 https://blog.csdn.net/weixin_44799217/article/details/128279250 merge和cherry-pick的区别: merge:是把某一个代码分支完全合并到当前的代码分支。完全合并的意…...

手动添加扩展到composer中
如果拓展包第三方没有提供composer安装方式,可以将扩展包手动添加到vendor目录下 将拓展包复制到vendor文件夹下 拓展包需要配置好composer.json文件中的autoload和包里面的命名空间 配置vendor/composer/autoload_psr4.php文件 xx\\xx\\ > array($vendorDir…...
TCP/IP
分层模型 TCP 传输控制协议 UDP 用户数据包协议 四层 应用层 负责发送/接收消息 传输层 负责拆分和组装 .期间会有编号 网络层 TCP/UDP 属于网络层, 不会判断和处理编号 数据链路层 以太网 ,网络设备 TCP 连接 TCP连接需要端口,进行通信 Java 通过Socket 接收消息 发送 …...
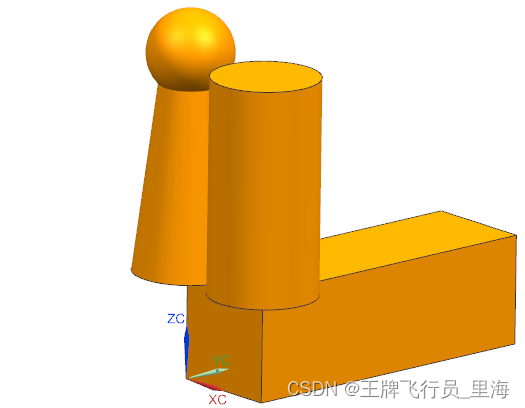
NX二次开发UF_CAM_set_clear_plane_data 函数介绍
文章作者:里海 来源网站:https://blog.csdn.net/WangPaiFeiXingYuan UF_CAM_set_clear_plane_data Defined in: uf_cam_planes.h int UF_CAM_set_clear_plane_data(tag_t object_tag, double origin [ 3 ] , double normal [ 3 ] ) overview 概述 De…...

如何在 ASP.NET Core 中使用 Quartz.NET
当我们在web开发中,常常会遇到这么一个需求,在后台执行某一项具体的任务,具体的说就是这些任务必须在后台定时执行。 Quartz.NET 是一个开源的 JAVA 移植版,它有着悠久的历史并且提供了强大的 Cron 表达式,这篇我们就…...

阿里云3M固定带宽服务器速度快吗?是否够用?
阿里云服务器3M带宽下载速度是384KB/秒,上传速度是1280KB/s(折合1.25M/秒),3M固定带宽够用吗?对于一般流量不是太大的个人博客、企业官网、论坛社区、小型电商网站或搭建个人学习环境或测试环境是完全够用的࿰…...
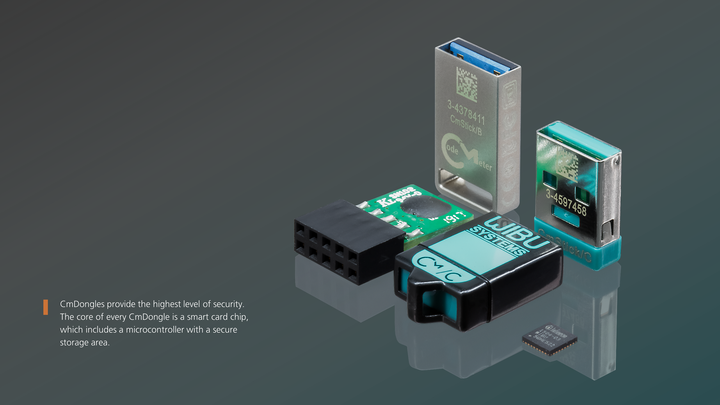
跨越行业边界,CodeMeter护航AI领域安全与合规
在人工智能(AI)技术如ChatGPT的推动下,工业视觉、医疗诊断和智能驾驶等领域正在经历重大变革。这些技术不仅扩大了应用范围,也带来了数据安全、软件授权保护和合规性等新挑战。 AI工业视觉正在推动制造和自动化的快速发展&#x…...

地磁传感器在城市交通智能监控系统的作用
地磁传感器的功能作用 地磁传感器的功能是相当强大的:当驾驶员把车辆停在车位上,地磁传感器能自动感应车辆的到来并开始计时;待车辆要离开时,传感器会自动把停车时间传送到中继站进行计费。因此,解决停车收费效率低下…...
自动解决IP冲突的问题 利用批处理更改末位IP循环+1直到网络畅通为止 解放双手 事半功倍
好久没出来写点什么了,难道今天有点时间,顺便把这两天碰到的问题出个解决方法吧。 这几天去客户那儿解决网络问题,因为客户的网络是固定的静态IP,因为没做MAC绑定,IP固定在本地电脑上,只要上不了网…...

目标检测 Faster RCNN全面解读复现
Faster RCNN 解读 经过R-CNN和Fast RCNN的积淀,Ross B. Girshick在2016年提出了新的Faster RCNN,在结构上,Faster RCNN已经将特征抽取(feature extraction),proposal提取,bounding box regression(rect refine)&…...

R 4.5并行任务调度失衡问题全解析,深度解读mc.cores自动降级机制与NUMA感知绑定方案
更多请点击: https://intelliparadigm.com 第一章:R 4.5并行计算效率优化概览 R 4.5 引入了对 parallel 包的深度增强,显著提升了多核 CPU 利用率与任务调度粒度控制能力。相比 R 4.4,其 fork 集群初始化延迟降低约 37%ÿ…...

ARM SVE指令集与AES加密硬件加速详解
1. ARM SVE指令集与向量处理基础现代处理器架构中,向量处理技术已经成为提升计算性能的关键手段。作为ARMv8架构的重要扩展,可伸缩向量扩展(Scalable Vector Extension, SVE)引入了一种全新的向量编程模型,相比传统的NEON SIMD指令集具有显著…...

开源对话大模型MOSS:从架构解析到微调部署实战指南
1. 项目概述:一个开源的对话式大语言模型最近在开源社区里,usemoss/moss这个项目引起了我的注意。简单来说,这是一个由复旦大学自然语言处理实验室(FudanNLP)团队开发并开源的中英双语对话大语言模型。它的名字“MOSS”…...

2026年阿里云Hermes Agent/OpenClaw搭建攻略+百炼token Plan配置解析攻略教程
2026年阿里云Hermes Agent/OpenClaw搭建攻略百炼token Plan配置解析攻略教程。OpenClaw和Hermes Agent是什么?OpenClaw和Hermes Agent怎么部署?如何部署OpenClaw/Hermes Agent?2026年还在为部署OpenClaw和Hermes Agent到处找教程踩坑吗&#…...

SVE指令集与DECW指令:现代SIMD编程核心技术解析
1. SVE指令集概述:现代SIMD处理的核心利器在当今处理器架构设计中,向量化计算已成为提升性能的关键手段。Arm的SVE(Scalable Vector Extension)指令集作为新一代SIMD扩展,彻底改变了传统固定长度向量指令的局限性。我第…...

彻底治愈AI“失忆”和胡说八道的真正办法
前言 Kubernetes 本身并不复杂,是我们把它搞复杂的。无论是刻意为之还是那种虽然出于好意却将优雅的原语堆砌成 鲁布戈德堡机械 的狂热。平台最初提供的 ReplicaSets、Services、ConfigMaps,这些基础组件简单直接,甚至显得有些枯燥。但后来我…...

突破格式限制:ncmdump NCM文件解密终极指南
突破格式限制:ncmdump NCM文件解密终极指南 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 还在为网易云音乐下载的NCM加密文件无法在其他设备播放而烦恼吗?今天,我将为你介绍一款强大的NCM文件解…...

ComfyUI MediaPipe 终极填坑:解决 incompatible function arguments 报错,基于代理模式的猴子补丁升级版
https://pypi.org/project/mediapipe/#description https://chuoling.github.io/mediapipe/getting_started/python.html ComfyUI MediaPipe 终极填坑:解决 incompatible function arguments 报错,基于代理模式的猴子补丁升级版 系列文章回顾࿱…...

百胜中国Q1利润创历史新高,百胜的亮点怎么看?
4月29日,百胜中国控股有限公司(以下简称“百胜中国”)公布2026年第一季度业绩。在行业竞争不断演进的背景下,公司交出亮眼成绩单。第一季度,百胜中国营收同比增长10%,经营利润同比增长12%,经营利…...

从防御者视角看mtgsig3.0:美团外卖App如何用设备指纹、RC4、AES层层加固API安全?
美团外卖MTGSig 3.0安全架构深度解析:构建企业级API防护体系 在移动互联网高速发展的今天,应用安全已成为企业生存发展的生命线。美团外卖作为日活数千万的超级App,其安全防护体系一直走在行业前沿。MTGSig 3.0签名算法作为其核心安全防线&am…...