自动驾驶术语汇总
目录
- 智驾级别
- 芯片相关
- 自动驾驶相关
- 辅助驾驶相关
- 预警相关
- 传感器相关
- 泊车相关
- 安全相关
- 车灯相关
智驾级别
L0-L2属于辅助驾驶,L4-L5才算自动驾驶
L0(Level 0):无自动化。这是大多数传统汽车的级别,所有的驾驶任务都需要由人类驾驶员完成。L0级别的自动驾驶可提供警告和瞬时辅助,比如主动刹车、盲点监测、车身稳定系统等等。
L1(Level 1):驾驶员辅助。这个级别的车辆有一些可以帮助驾驶员的系统,如自适应巡航控制或车道保持辅助,但是驾驶员仍然需要全程控制车辆。
L2(Level 2):部分自动化。这个级别的车辆可以在某些情况下接管驾驶,如高速公路驾驶,但驾驶员仍需随时准备接管控制。ACC自动巡航、自动跟车、自动泊车等。
L3(Level 3):有条件的自动化。车辆在某些条件下可以完全接管驾驶,如在高速公路上或者交通繁忙的市区,但在系统无法处理的情况下,驾驶员需要在一定的预警时间内接管车辆。
L4(Level 4):高度自动化。车辆可以在大部分情况下自动驾驶,即使在紧急情况下,也不需要驾驶员介入。但可能在某些特定条件下,例如极端天气或者无法导航的地区,仍需要驾驶员接管。
L5(Level 5):完全自动化。车辆在所有路况和环境下都能自行驾驶,不需要驾驶员的任何介入。
芯片相关
SoC:(芯)片上系统(System on Chip)
IC : 集成电路(Integrated Circuit)
SIMD:单指令流多数据技术(Single Instruction Multiple Data)
VLIW:超长指令集架构,指令级并行(Very Large Instruction Word)
ALU : 算术逻辑运算单元(Arithmetic Logical Unit)
MAC : 乘积累加运算(Multiply Accumulate)
MMU: 内存管理单元 (Memory Management Unit)
DDR : 双倍速率同步动态随机存储器(内存的一种)(Double Data Rate SDRAM)
自动驾驶相关
AD:自动驾驶(Autonomous Driving)
DDT:动态驾驶任务(Dynamic driving task)
ODD :设计运行域 OperationalDesign Domain
OEDR:物体和事件探测与反馈 (Object and Event Detection and Response)
DDTFallback:动态驾驶任务支援
HWA:高速公路辅助(High Way Assist)
HWP:高速公路辅助(High Way Pilot)
AOT:主动超车(Auto Over Take)
辅助驾驶相关
ADAS:先进驾驶辅助系统(Advanced Driving Assistance System)
ACC:自适应巡航(Adaptive Cruise Control)
ALC:自动变道辅助(Auto Lane Change)
BSD:盲点监测(Blind Spot Detection)
DMS:驾驶员状态监测系统(Driver Monitor System)
OMS:车载驾舱监控系统(Occupant Monitoring System)
HUD:抬头显示系统(Head Up Display)
HWA:高速路辅助(High Way Assist)
ICA:智能巡航辅助(Intelligent Cruise Assist)
LCA:变道辅助(Lane Change Assist)
LCC(S):车道居中控制(Lane Centering Control System)
LDP:车道偏离抑制(Lane Departure Prevention)
LKA:车道保持辅助(Lane Keep Assist)
SAS:速度辅助系统(Speed Assist System)
SLA:限速辅助(Speed Limit Assist)
TJA:交通拥堵辅助(Traffic Jam Assist)
TJP:交通拥堵代驾(Traffic Jam Pilot)
TLR:交通信号灯识别(Traffic Light Recognition)
TSR:交通标志识别(Traffic Signal Recognition)
MLD(S):多车道检测系统(Multilane Detection System)
ALCA:提前换道辅助系统(Advanced Lane Change Assistant System)
预警相关
BCW:盲点碰撞预警(Blind Collision Warning)
FCW:前向碰撞预警(Foward Collision Warning)
RCW:后向碰撞预警(Rear Collison Warning)
LDW:车道偏离预警(Lane Departure Warning)
RCTA倒车侧碰预警系统(Rear Cross Traffic Alert)
RCWS后防碰撞预警系统(Rear Collision Warning System)
传感器相关
Lidar:激光雷达
Radar:雷达
MMWR:毫米波雷达(Millimeter Wave Radar)
USS :超声波传感器(UltraSonic Sensor)
Monocular Camera:单目摄像头
Binocular Camera:双目摄像头
AVM :360环视摄像头(Around View Monitoring)
IMU:惯性测量单元(Inertial Measurement Unit)是一种传感器
HD map:高精地图(High-Definition Map)
泊车相关
APA :自动泊车辅助(Automatic Parking Assist)
RPA :遥控泊车(Remote Parking Assist)
HPP :家庭记忆泊车(Home Zone Parking Pilot)
AVP :自主代客泊车(Autonomous Valet Parking)
HAVP:家庭区域自动泊车(Home Autonomous Valet Parking)
PAVP:停车场代客泊车(Park Autonomous Valet Parking )
安全相关
ABS:防抱死制动系统(Anti-lock Braking System)
AEB:自动紧急制动(Autonomous Emergency Breaking)
AEB-VRU:行人自动紧急制动系统(AEB-Vulnerable Road User)
PCW:行人安全辅助(Pedestrian Collision Warning)
AESC:自动紧急转向控制(Auto Emergency Steering Control)
AEBS:自动紧急制动系统(Auto Emergency Brake System)
车灯相关
ADB:自适应远光灯(Adaptive Driving Beam)
DLP:数字光处理(Digital Lighting Process),可投影的加强版ADB;
PML:可编程矩阵大灯(Programmable Matrix Lighting)
ISD:智能交互灯(Intelligent Signal Display)
HBA:大灯辅助(High Beam Assist)
IHC:智能远近光控制(Intelligence High-Low Beam Control)
NVS:夜视系统(Night Vision System)
相关文章:

自动驾驶术语汇总
目录 智驾级别芯片相关自动驾驶相关辅助驾驶相关预警相关传感器相关泊车相关安全相关车灯相关 智驾级别 L0-L2属于辅助驾驶,L4-L5才算自动驾驶 L0(Level 0):无自动化。这是大多数传统汽车的级别,所有的驾驶任务都需要…...

Jsonpath - 数据中快速查找和提取的强大工具
JSON(JavaScript Object Notation)在现代应用程序中广泛使用,但是如何在复杂的JSON数据中 查找和提取所需的信息呢? JSONPath是一种功能强大的查询语言,可以通过简单的表达式来快速准确地定位和提取JSON数据。本文将介…...
java中,通过替换word模板中的关键字后输出一个新文档
一、要用到的jar包 我已上传了相关的jar包,需要的可以通过以下链接直接下载: https://download.csdn.net/download/qq_27387133/88558034 具体jar包截图: 二、实现的代码 注意:文件要用docx格式!!! word变量替换的方法&#…...

MySQL数据库约束你真的懂吗?
✏️✏️✏️今天给各位带来的是关于数据库约束方面的知识 清风的CSDN博客 😛😛😛希望我的文章能对你有所帮助,有不足的地方还请各位看官多多指教,大家一起学习交流! 动动你们发财的小手,点点关…...

YOCTO 下载repo工具失败解决办法
curl https://mirrors.tuna.tsinghua.edu.cn/git/git-repo -o repocp repo ~/binchmod ax ~/bin/repo如果使用时报错, 切换ubuntu 到 python3 版本。gedit repo 修改repo默认链接地址:REPO_URL "https://gerrit.googlesource.com/git-repo"…...

github连接失败Host key verification failed.解决方案
问题描述 之前一直用的gitee协同协作,然后再最近一次云计算项目中团队使用的是github进行协作,但是按照常规步骤再GitHub上配置了ssh密钥后,却依然显示连接失败,无法推送和拉取代码,克隆仓库也是报错拒绝。具体报错信…...

【TIDB】TiDB认证考试PTCA 练习题 题库
目录 题目 答案 解析 题目 1.下列功能是由 TiKV 或 TiFlash 实现的为?( 选 2 项 ) A. 根据集群中 Region 的信息,发出调度指令 B. 对于 OLAP 和 OLTP 进行业务隔离 C. 将关系型数据转化为 KV 存储进行持久化 D. 将 KV 存储…...

PPP/INS紧组合算法
前言:在学习紧组合之前学会GNSS/INS松组合是很有必要的,i2NAV团队开源的KF_GINS项目可以作为GNSS/INS松组合学习模板,本文章主要对武汉大学i2NAV发布的PPP/INS紧组合学习资源进行算法层面的总结,链接: 武汉大学多源智…...

【shell】 1、bash语法超详细介绍
文章目录 修改前缀路径dirname set常用函数参数变量local 返回值正则打印第 n 行获取行号核对数据库各表数量jq查询检查日志 sshpassexpect数组xargs bash manual 修改前缀 参考 export PS1"bash> "路径 dirname strip last component from file name dir$(…...
华清远见嵌入式学习——网络编程——作业3
目录 作业要求:基于UDP的TFTP文件传输 代码 下载功能效果图编辑 上传功能效果图 思维导图 模拟面试题和答案(定期更新) 作业要求:基于UDP的TFTP文件传输 完成文件的上传和下载功能 代码 #include<myhead.h>//实现…...
前端学习--React(3)
一、Redux 集中状态管理工具,不需要react即可使用,每个store的数据都是独立于组件之外的 vue小链接:vuex/pinia 基本使用 Redux将数据修改流程分成三个概念,state、action和reducer state - 一个对象 存放我们管理的数据状态 a…...
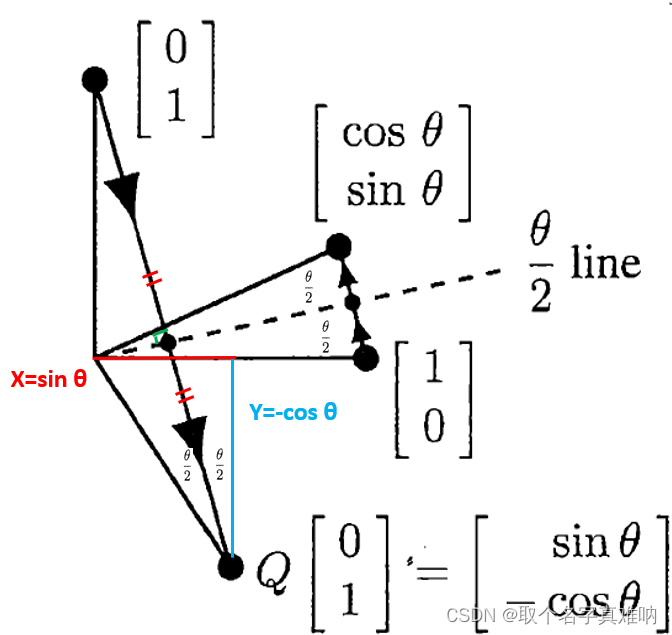
rotation matrix reflection matrix
文章目录 1. rotation matrix1.1 结论 2. reflection matrix2.1 结论 1. rotation matrix 图像逆时针旋转 θ \theta θ的矩阵 Q r o t a t e [ cos θ − sin θ sin θ cos θ ] (1) Q_{rotate}\begin{bmatrix}\cos\theta&-\sin\theta\\\sin\theta&\c…...
Python基础教程: sorted 函数
嗨喽,大家好呀~这里是爱看美女的茜茜呐 sorted 可以对所有可迭代的对象进行排序操作, sorted 方法返回的是一个新的 list,而不是在原来的基础上进行的操作。 从新排序列表。 👇 👇 👇 更多精彩机密、教程…...
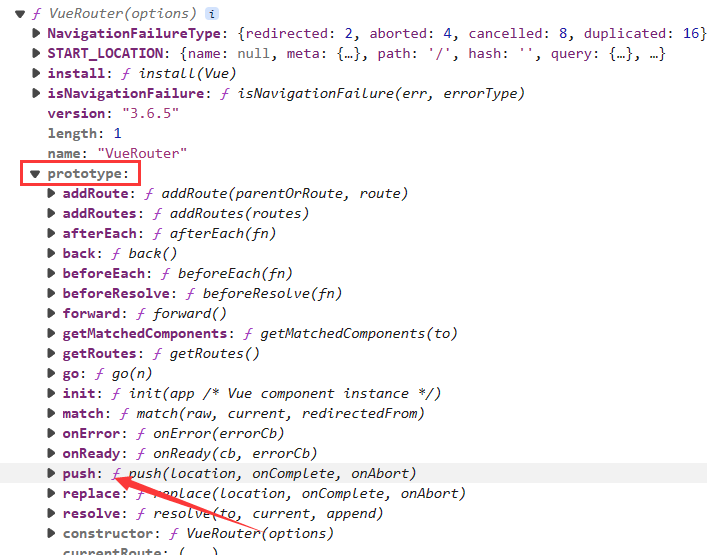
Vue 重写push和replace方法,解决:Avoided redundant navigation to current location
当我们使用编程式路由导航跳转路径时,如果我们两次携带同样的参数进行跳转,会进行页面报错: 那产生这个问题的原因是什么呢? 我们接收并输出调用push方法返回的结果: 会发现这是一个Promise对象 我们都知道ÿ…...

43、vue导出pdf文件,并解决滚动条外内容无法获取的问题
使用插件html2canvas和jspdf插件 下载完两个插件后引入所需要的页面 import html2canvas from "html2canvas" import jsPDF from "jspdf"1、在导出之前将元素的高度或者宽度设置为滚动高度或者宽度,如: el.style.height el.scro…...
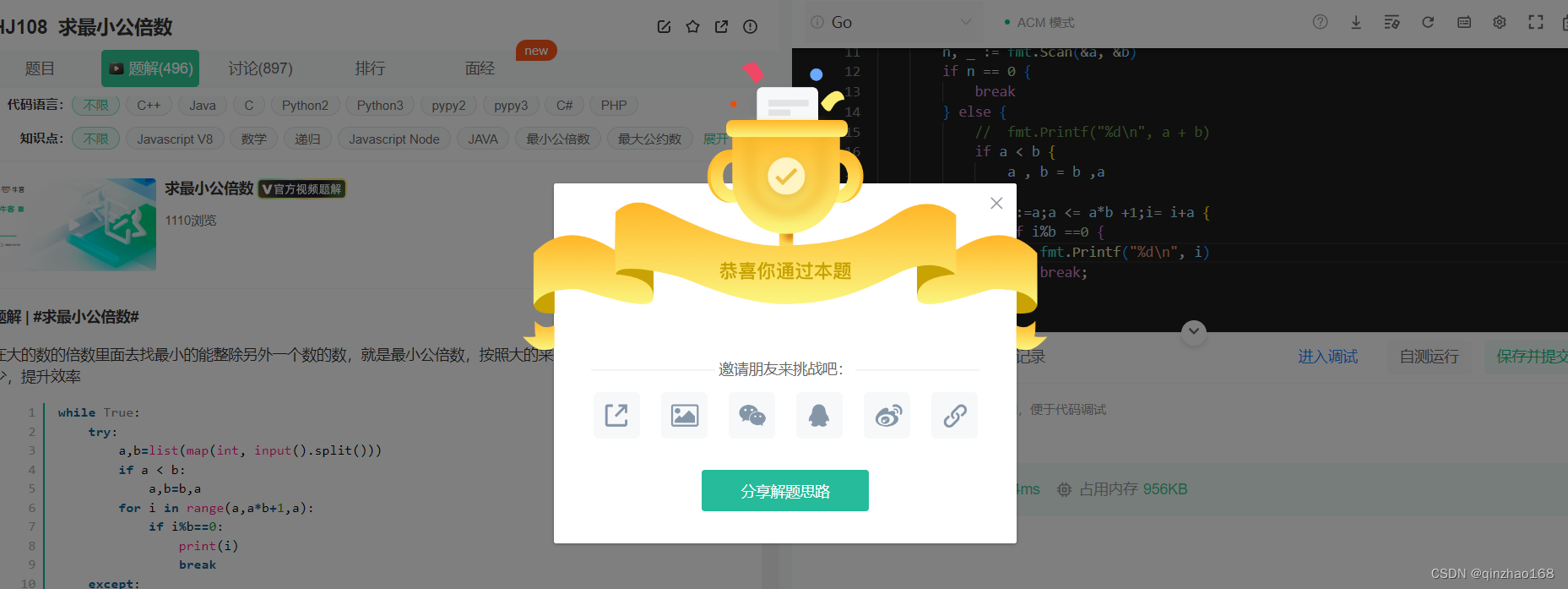
牛客 最小公配数 golang版实现
题目请参考: HJ108 求最小公倍数 题解: 在大的数的倍数里面去找最小的能整除另外一个数的数,就是最小公倍数,按照大的来找,循环次数能够降到很少,提升效率 golang实现: package mainimport ("fmt" )func main() {a : …...
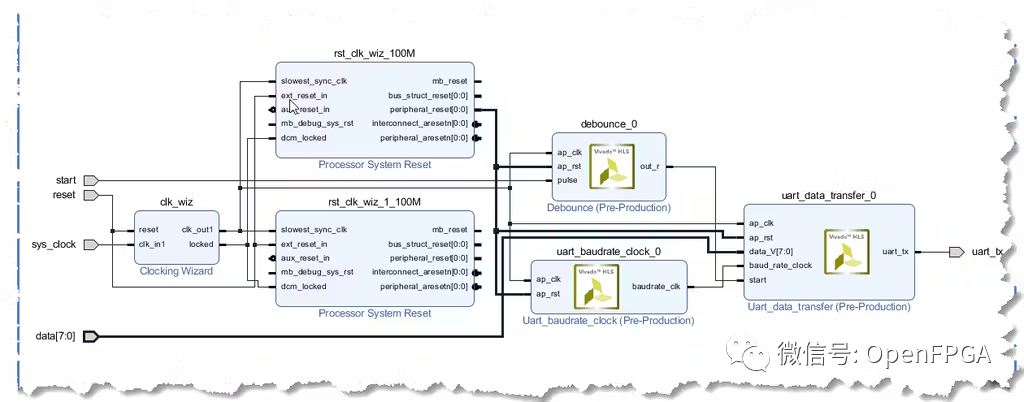
用 HLS 实现 UART
用 HLS 实现 UART 介绍 UART 是一种旧的串行通信机制,但仍在很多平台中使用。它在 HDL 语言中的实现并不棘手,可以被视为本科生的作业。在这里,我将通过这个例子来展示在 HLS 中实现它是多么容易和有趣。 因此,从概念上讲…...

华清远见嵌入式学习——网络编程——作业4
作业要求:①使用IO多路复用中的select函数实现TCP并发服务器客户端 ②使用IO多路复用中的poll函数实现TCP并发服务器的服务器端 一、 代码 #include <myhead.h>#define SERPORT 8888 //服务器端口号 #define SERIP "192.168.114.113"…...
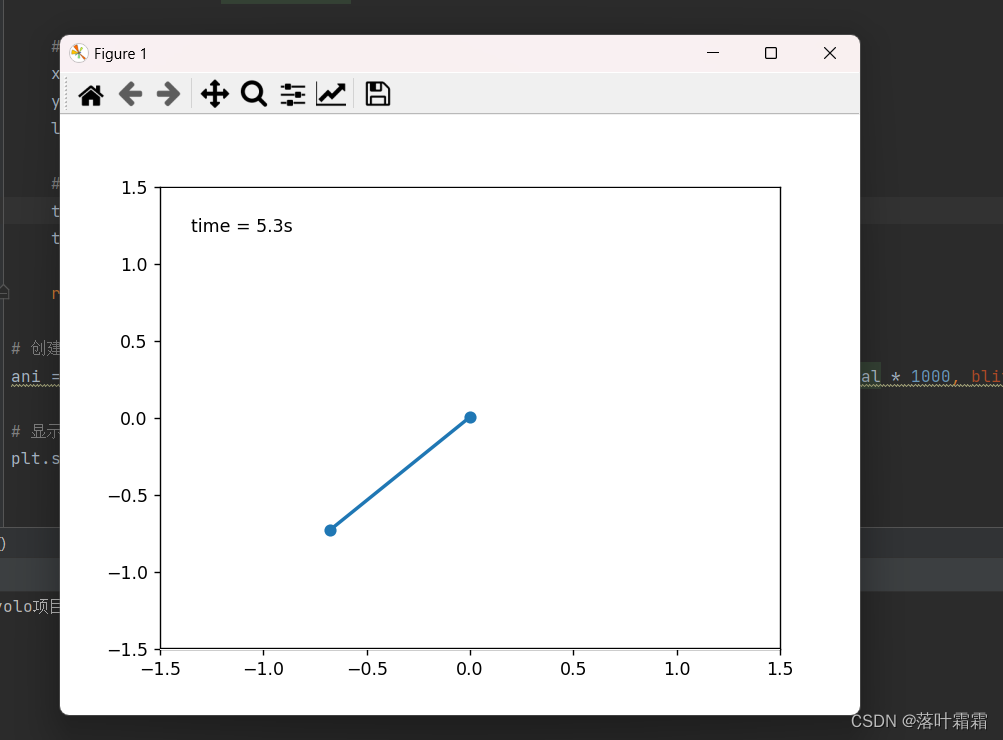
【OpenCV实现图像:制作酷炫的动画效果】
文章目录 概要生成背景图添加点动画添加文本显示小结 概要 首先,通过导入必要的库,包括NumPy用于数学运算和Matplotlib库用于数据可视化。随后,创建图形和轴,初始化点的位置,以及编写初始化函数和更新函数。 初始化函…...

别再手写过滤器!Spring Cloud Gateway 内置 30+ 个,少写 80% 重复代码
别再手写过滤器!Spring Cloud Gateway 内置 30+ 个,少写 80% 重复代码 摘要:很多团队一做网关就习惯性手写过滤器,最后把简单问题做复杂,把配置问题做成代码问题。事实上,Spring Cloud Gateway 已经内置了 30+ 个 GatewayFilter Factory 与一组关键 GlobalFilter,覆盖路…...

AMD Ryzen嵌入式单板计算机PCSF51工业应用解析
1. DFI PCSF51工业级单板计算机概述DFI PCSF51是一款采用AMD Ryzen Embedded R2000系列处理器的1.8英寸工业级单板计算机(SBC)。这款名片大小的板卡专为空间受限的工业应用场景设计,在仅8455mm的紧凑尺寸内集成了强大的计算性能与丰富的I/O接口。作为DFI GHF51的升级…...
)
WASM替代传统容器?Docker官方未公开的Runtime Benchmark对比报告(延迟↓41%,内存占用↓68%,附压测脚本)
更多请点击: https://intelliparadigm.com 第一章:WASM替代传统容器?Docker官方未公开的Runtime Benchmark对比报告(延迟↓41%,内存占用↓68%,附压测脚本) WebAssembly System Interface&#…...

文墨共鸣实操:用AI辅助创意写作与文案优化
文墨共鸣实操:用AI辅助创意写作与文案优化 1. 引言:当传统美学遇上AI写作 在创意写作和商业文案创作中,我们常常面临这样的困境:如何判断两个不同表达是否传达了相同的意思?如何确保改写后的文案保留了原版的核心信息…...

机器学习ROADM光网络故障定位策略【附代码】
✨ 本团队擅长数据搜集与处理、建模仿真、程序设计、仿真代码、EI、SCI写作与指导,毕业论文、期刊论文经验交流。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,查看文章底部二维码(1)级联神经网络与回溯修正模块的故障定位算法&#x…...

从“找Bug”到“防Bug”:测试左移与质量内建实战
软件测试的范式转移在传统的软件开发生命周期(SDLC)中,测试活动往往被置于开发阶段之后,扮演着“质量守门员”的角色。测试工程师的主要职责是在代码完成后,通过系统性的测试来“寻找”缺陷(Bug)…...

链开源免费的WPS AI 软件 察元AI文档助手:路 013:shouldUsePlainDocumentPipeline 与批注类动作分流
链路 013:shouldUsePlainDocumentPipeline 与批注类动作分流 总体链路图 下图在全系列各篇保持一致,仅通过高亮样式标示本篇所覆盖的环节;箭头表示主成功路径,点线为异常或可选路径。阅读任意一篇时都应能回到本图定位ÿ…...

OBS虚拟背景插件:3分钟打造专业直播间的完整指南
OBS虚拟背景插件:3分钟打造专业直播间的完整指南 【免费下载链接】obs-backgroundremoval An OBS plugin for removing background in portrait images (video), making it easy to replace the background when recording or streaming. 项目地址: https://gitco…...

Font Awesome 加载中图标的使用与优化
Font Awesome 加载中图标的使用与优化 随着互联网技术的不断发展,前端设计逐渐成为了用户体验的重要组成部分。而在前端设计中,图标的使用尤为关键。Font Awesome 是目前最受欢迎的前端图标库之一,其提供的加载中图标为网页或应用程序的交互性提供了极大的便利。本文将详细…...

如何用5个文件实现微信自动化:WechatBot轻量级解决方案
如何用5个文件实现微信自动化:WechatBot轻量级解决方案 【免费下载链接】WechatBot 项目地址: https://gitcode.com/gh_mirrors/wechatb/WechatBot 你是否厌倦了每天重复回复相同的微信消息?是否希望有一个24小时在线的智能助手帮你处理繁琐的沟…...