【附代码】判断线段是否相交算法(Python,C++)
【附代码】判断线段是否相交算法(Python,C++)
文章目录
- 【附代码】判断线段是否相交算法(Python,C++)
- 相关文献
- 测试电脑配置
- 基础
- 向量旋转
- 向量缩放
- 向量投影
- 推导
- 点乘
- 定义
- 推导
- 几何意义
- 叉乘
- 定义
- 推导
- 几何意义
- 判断线段是否相交
- 代码
- C++
- Python
- 画图代码
- 测试结果
作者:小猪快跑
基础数学&计算数学,从事优化领域5年+,主要研究方向:MIP求解器、整数规划、随机规划、智能优化算法
如有错误,欢迎指正。如有更好的算法,也欢迎交流!!!——@小猪快跑
相关文献
测试电脑配置
博主三千元电脑的渣渣配置:
CPU model: AMD Ryzen 7 7840HS w/ Radeon 780M Graphics, instruction set [SSE2|AVX|AVX2|AVX512]
Thread count: 8 physical cores, 16 logical processors, using up to 16 threads
基础
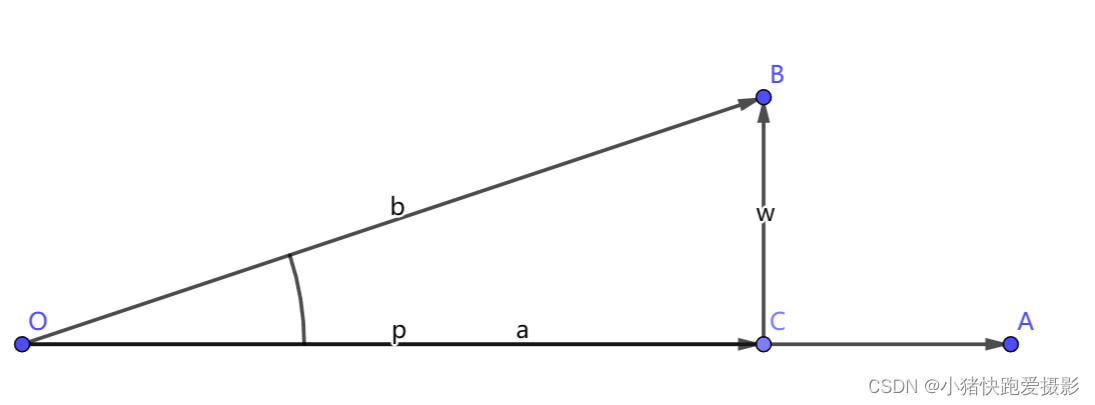
这里假设:
O A → = a ⃗ = ( x a , y a ) O B → = b ⃗ = ( x b , y b ) O C → = p ⃗ = ( x c , y c ) C B → = w ⃗ ∠ A O B = α \overrightarrow{OA} = \vec{a} = (x_a,y_a) \\ \overrightarrow{OB} = \vec{b} = (x_b,y_b) \\ \overrightarrow{OC} = \vec{p} = (x_c,y_c) \\ \overrightarrow{CB} = \vec{w} \\ ∠AOB = \alpha OA=a=(xa,ya)OB=b=(xb,yb)OC=p=(xc,yc)CB=w∠AOB=α
向量旋转
任意向量都能表示成:
( r cos α r sin α ) \left ( \begin{matrix} r\cos{\alpha} \\ r\sin{\alpha} \\ \end{matrix} \right ) (rcosαrsinα)
假设向量逆时针旋转了 β \beta β,那么我们容易知道旋转后向量是:
( r cos ( α + β ) r sin ( α + β ) ) \left ( \begin{matrix} r\cos({\alpha + \beta}) \\ r\sin({\alpha + \beta}) \\ \end{matrix} \right ) (rcos(α+β)rsin(α+β))
那么容易得到:
( r cos ( α + β ) r sin ( α + β ) ) = ( cos α − sin α sin α cos α ) ( r cos α r sin α ) \left ( \begin{matrix} r\cos({\alpha + \beta}) \\ r\sin({\alpha + \beta}) \\ \end{matrix} \right )= \left ( \begin{array}{rr} \cos{\alpha} & -\sin{\alpha} \\ \sin{\alpha} & \cos{\alpha} \\ \end{array} \right ) \left ( \begin{matrix} r\cos{\alpha} \\ r\sin{\alpha} \\ \end{matrix} \right ) (rcos(α+β)rsin(α+β))=(cosαsinα−sinαcosα)(rcosαrsinα)
于是旋转向量就是:
( cos α − sin α sin α cos α ) \left ( \begin{array}{rr} \cos{\alpha} & -\sin{\alpha} \\ \sin{\alpha} & \cos{\alpha} \\ \end{array} \right ) (cosαsinα−sinαcosα)
向量缩放
( r 0 0 r ) \left ( \begin{array}{rr} r & 0 \\ 0 & r \\ \end{array} \right ) (r00r)
向量投影
推导
主要利用 O C → \overrightarrow{OC} OC 和 C B → \overrightarrow{CB} CB 垂直,点积为0:
w ⃗ = b ⃗ − p ⃗ w ⃗ ⋅ p ⃗ = 0 } ⇒ ( b ⃗ − p ⃗ ) ⋅ p ⃗ = 0 p ⃗ = k a ⃗ } ⇒ ( b ⃗ − k a ⃗ ) ⋅ k a ⃗ = 0 p ⃗ = k a ⃗ } ⇒ p ⃗ = a ⃗ ⋅ b ⃗ a ⃗ ⋅ a ⃗ a ⃗ \left. \begin{array}{r} \left. \begin{array}{l} \vec{w}=\vec{b}-\vec{p} \\ \vec{w} \cdot \vec{p} = 0 \end{array} \right\} \Rightarrow (\vec{b}-\vec{p}) \cdot \vec{p} = 0\\ \vec{p} = k \vec{a} \end{array} \right\} \Rightarrow \left. \begin{array}{r} (\vec{b}-k \vec{a}) \cdot k \vec{a} = 0 \\ \vec{p} = k \vec{a} \end{array} \right\} \Rightarrow \vec{p} = \frac{\vec{a} \cdot \vec{b}}{\vec{a} \cdot \vec{a}} \vec{a} w=b−pw⋅p=0}⇒(b−p)⋅p=0p=ka⎭ ⎬ ⎫⇒(b−ka)⋅ka=0p=ka}⇒p=a⋅aa⋅ba
那么投影矩阵
P b ⃗ = p ⃗ = a ⃗ a ⃗ ⋅ b ⃗ a ⃗ ⋅ a ⃗ ⇒ P = a ⃗ a ⃗ T a ⃗ T a ⃗ \begin{array}{l} & P\vec{b} = \vec{p} = \vec{a} \frac{\vec{a} \cdot \vec{b}}{\vec{a} \cdot \vec{a}} \\ \Rightarrow & P = \frac{\vec{a}\vec{a}^T}{\vec{a}^T\vec{a}} \end{array} ⇒Pb=p=aa⋅aa⋅bP=aTaaaT
点乘
点乘(Dot Product)的结果是点积,又称数量积或标量积(Scalar Product)
定义
a ⃗ ⋅ b ⃗ = ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos α \vec{a} \cdot \vec{b} = |\vec{a}||\vec{b}|\cos{\alpha} a⋅b=∣a∣∣b∣cosα
推导
那么如何用解析几何来表示呢?
我们其实可以把 a ⃗ \vec{a} a 旋转 α \alpha α 再缩放 ∣ b ⃗ ∣ / ∣ a ⃗ ∣ |\vec{b}|/|\vec{a}| ∣b∣/∣a∣ 倍,就是 b ⃗ \vec{b} b 了:
( ∣ b ⃗ ∣ ∣ a ⃗ ∣ 0 0 ∣ b ⃗ ∣ ∣ a ⃗ ∣ ) ( cos α − sin α sin α cos α ) ( x a y a ) = ( x b y b ) ⇒ ( ( x a cos α − y a sin α ) ∣ b ⃗ ∣ ( x a sin α + y a cos α ) ∣ b ⃗ ∣ ) = ( x b ∣ a ⃗ ∣ y b ∣ a ⃗ ∣ ) ⇒ ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos α = x a x b + y a y b \begin{array}{l} &\left ( \begin{matrix} \frac{|\vec{b}|}{|\vec{a}|} & 0 \\ 0 & \frac{|\vec{b}|}{|\vec{a}|} \\ \end{matrix} \right ) \left ( \begin{array}{rr} \cos{\alpha} & -\sin{\alpha} \\ \sin{\alpha} & \cos{\alpha} \\ \end{array} \right ) \left ( \begin{matrix} x_a \\ y_a \\ \end{matrix} \right )= \left ( \begin{matrix} x_b \\ y_b \\ \end{matrix} \right ) \\ \Rightarrow & \left ( \begin{matrix} (x_a\cos{\alpha} - y_a\sin{\alpha})|\vec{b}| \\ (x_a\sin{\alpha} + y_a\cos{\alpha})|\vec{b}| \\ \end{matrix} \right )= \left ( \begin{matrix} x_b|\vec{a}| \\ y_b|\vec{a}| \\ \end{matrix} \right ) \\ \Rightarrow & |\vec{a}||\vec{b}|\cos{\alpha} = x_a x_b + y_a y_b \end{array} ⇒⇒ ∣a∣∣b∣00∣a∣∣b∣ (cosαsinα−sinαcosα)(xaya)=(xbyb)((xacosα−yasinα)∣b∣(xasinα+yacosα)∣b∣)=(xb∣a∣yb∣a∣)∣a∣∣b∣cosα=xaxb+yayb
几何意义
点乘的结果表示 a ⃗ \vec{a} a 在 b ⃗ \vec{b} b 方向上的投影与 b ⃗ \vec{b} b 的乘积,反映了两个向量在方向上的相似度,结果越大越相似。基于结果可以判断这两个向量是否是同一方向,是否正交垂直,具体对应关系为:
- a ⃗ ⋅ b ⃗ > 0 \vec{a} \cdot \vec{b} > 0 a⋅b>0 则方向基本相同,夹角在0°到90°之间
- a ⃗ ⋅ b ⃗ = 0 \vec{a} \cdot \vec{b} = 0 a⋅b=0 则正交,相互垂直
- a ⃗ ⋅ b ⃗ < 0 \vec{a} \cdot \vec{b} < 0 a⋅b<0 则方向基本相反,夹角在90°到180°之间
叉乘
叉乘(Cross Product)又称向量积(Vector Product)。
定义
a ⃗ × b ⃗ = ∣ a ⃗ ∣ ∣ b ⃗ ∣ sin α \vec{a} \times \vec{b} = |\vec{a}||\vec{b}|\sin{\alpha} a×b=∣a∣∣b∣sinα
推导
那么如何用解析几何来表示呢?
我们其实可以把 a ⃗ \vec{a} a 旋转 α \alpha α 再缩放 ∣ b ⃗ ∣ / ∣ a ⃗ ∣ |\vec{b}|/|\vec{a}| ∣b∣/∣a∣ 倍,就是 b ⃗ \vec{b} b 了:
( ∣ b ⃗ ∣ ∣ a ⃗ ∣ 0 0 ∣ b ⃗ ∣ ∣ a ⃗ ∣ ) ( cos α − sin α sin α cos α ) ( x a y a ) = ( x b y b ) ⇒ ( ( x a cos α − y a sin α ) ∣ b ⃗ ∣ ( x a sin α + y a cos α ) ∣ b ⃗ ∣ ) = ( x b ∣ a ⃗ ∣ y b ∣ a ⃗ ∣ ) ⇒ ∣ a ⃗ ∣ ∣ b ⃗ ∣ sin α = x a y b − x b y a \begin{array}{l} & \left ( \begin{matrix} \frac{|\vec{b}|}{|\vec{a}|} & 0 \\ 0 & \frac{|\vec{b}|}{|\vec{a}|} \\ \end{matrix} \right ) \left ( \begin{array}{rr} \cos{\alpha} & -\sin{\alpha} \\ \sin{\alpha} & \cos{\alpha} \\ \end{array} \right ) \left ( \begin{matrix} x_a \\ y_a \\ \end{matrix} \right )= \left ( \begin{matrix} x_b \\ y_b \\ \end{matrix} \right ) \\ \Rightarrow & \left ( \begin{matrix} (x_a\cos{\alpha} - y_a\sin{\alpha})|\vec{b}| \\ (x_a\sin{\alpha} + y_a\cos{\alpha})|\vec{b}| \\ \end{matrix} \right )= \left ( \begin{matrix} x_b|\vec{a}| \\ y_b|\vec{a}| \\ \end{matrix} \right ) \\ \Rightarrow & |\vec{a}||\vec{b}|\sin{\alpha} = x_a y_b - x_b y_a \end{array} ⇒⇒ ∣a∣∣b∣00∣a∣∣b∣ (cosαsinα−sinαcosα)(xaya)=(xbyb)((xacosα−yasinα)∣b∣(xasinα+yacosα)∣b∣)=(xb∣a∣yb∣a∣)∣a∣∣b∣sinα=xayb−xbya
几何意义
如果以向量 a ⃗ \vec{a} a 和 b ⃗ \vec{b} b 为边构成一个平行四边形,那么这两个向量外积的模长与这个平行四边形的面积相等。
判断线段是否相交
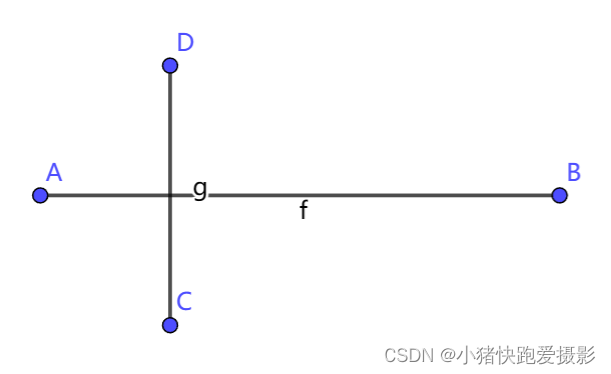
我们有了上面的基础后,其实思路就一下打开了!
其实我们只要想着 A B → \overrightarrow{AB} AB 的两边是 C C C 和 D D D ,那么也就是说 A B → × A D → \overrightarrow{AB} \times \overrightarrow{AD} AB×AD 和 A B → × A C → \overrightarrow{AB} \times \overrightarrow{AC} AB×AC 有正有负,同时呢 C D → × C A → \overrightarrow{CD} \times \overrightarrow{CA} CD×CA 和 C D → × C B → \overrightarrow{CD} \times \overrightarrow{CB} CD×CB 有正有负(这里要注意一下叉乘可能为0的情况,比如说 A A A 在 C D → \overrightarrow{CD} CD 上)。这里我们有正有负采用直接判断而不是相乘小于零,这是因为相乘可能存在数值溢出等问题。而且一般的,和零的判断比乘法快很多。
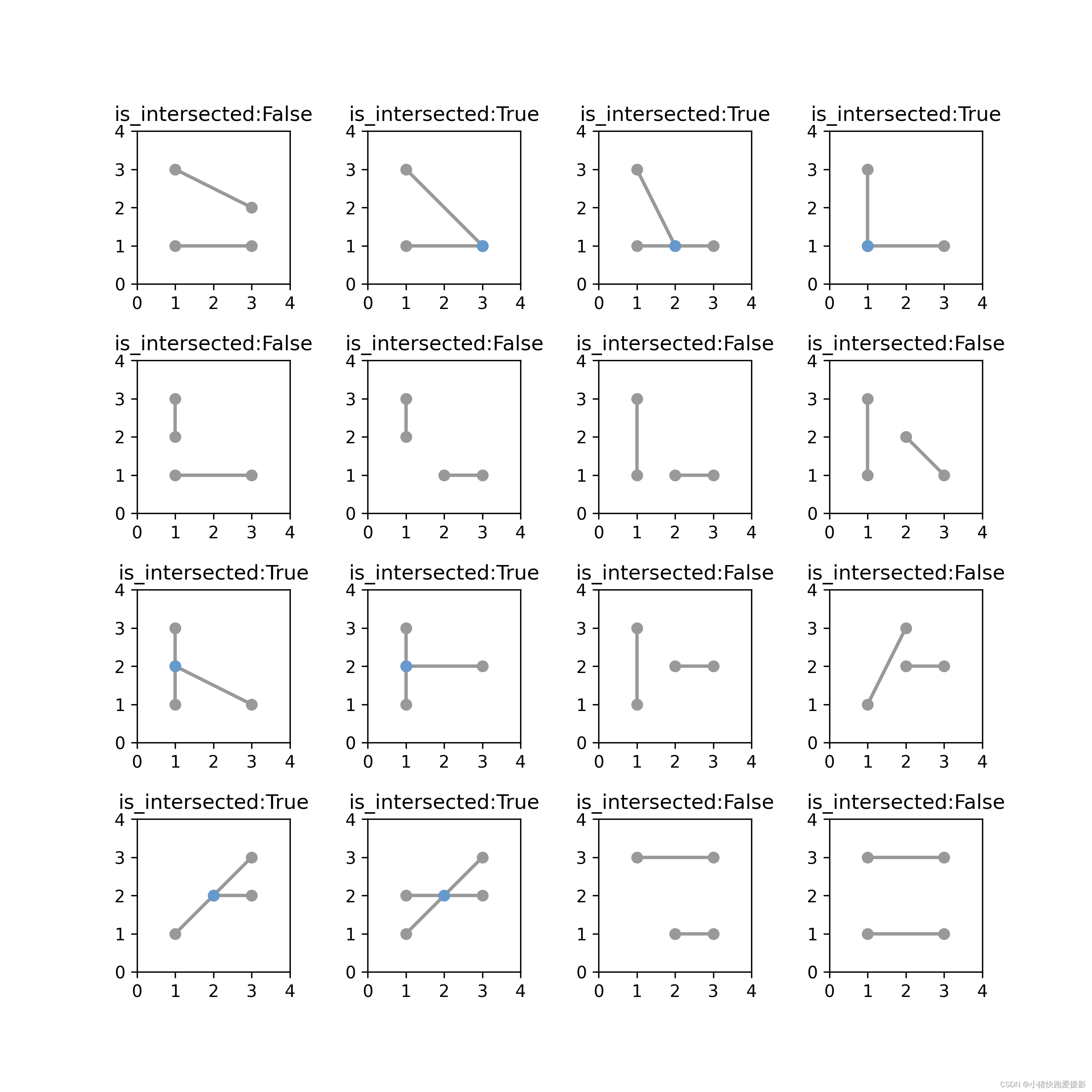
我们直接上测试用例看看效果!!!
代码
C++
#include <iostream>
#include <chrono>using namespace std;int cross_product(int x1, int y1, int x2, int y2) {// 计算向量 (x1, y1) 和向量 (x2, y2) 的叉积return x1 * y2 - x2 * y1;
}int dot_product(int x1, int y1, int x2, int y2) {// 计算向量 (x1, y1) 和向量 (x2, y2) 的点乘return x1 * x2 + y1 * y2;
}bool is_intersected(int x1, int y1, int x2, int y2, int x3, int y3, int x4, int y4) {/*判断线段 (x1, y1)-(x2, y2) 和线段 (x3, y3)-(x4, y4) 是否相交AB×ACAB×ADCD×CACD×CB*/if ((max(x1, x2) < min(x3, x4)) or (max(x3, x4) < min(x1, x2)) or (max(y1, y2) < min(y3, y4)) or (max(y3, y4) < min(y1, y2))) {return false;}int abx = x2 - x1;int aby = y2 - y1;int acx = x3 - x1;int acy = y3 - y1;int adx = x4 - x1;int ady = y4 - y1;int bcx = x3 - x2;int bcy = y3 - y2;int cdx = x4 - x3;int cdy = y4 - y3;int cp1 = cross_product(abx, aby, acx, acy);int cp2 = cross_product(abx, aby, adx, ady);int cp3 = cross_product(cdx, cdy, -acx, -acy);int cp4 = cross_product(cdx, cdy, -bcx, -bcy);// 如果两个叉积的乘积小于0,则两个向量在向量 (x1, y1)-(x2, y2) 的两侧,即线段相交if (((cp1 > 0 and 0 > cp2) or (cp1 < 0 and 0 < cp2) or cp1 == 0 or cp2 == 0) and((cp3 > 0 and 0 > cp4) or (cp3 < 0 and 0 < cp4) or cp3 == 0 or cp4 == 0)) {return true;}return false;
}int test(int n) {int res = 0;for (auto x1 = 0; x1 < n; x1++) {for (auto y1 = 0; y1 < n; y1++) {for (auto x2 = 0; x2 < n; x2++) {for (auto y2 = 0; y2 < n; y2++) {if (x1 == x2 and y1 == y2) {continue;}for (auto x3 = 0; x3 < n; x3++) {for (auto y3 = 0; y3 < n; y3++) {for (auto x4 = 0; x4 < n; x4++) {for (auto y4 = 0; y4 < n; y4++) {if (x3 == x4 and y3 == y4) {continue;}res += is_intersected(x1, y1, x2, y2, x3, y3, x4, y4);}}}}}}}}return res;
}int main() {auto start = std::chrono::high_resolution_clock::now();std::cout << test(7) << std::endl;auto finish = std::chrono::high_resolution_clock::now();std::chrono::duration<double> elapsed = finish - start;std::cout << "Elapsed time: " << elapsed.count() << " s\n" << std::endl;return 0;
}
Python
from time import time
import math
from numba import njit@njit
def cross_product(x1, y1, x2, y2):"""计算向量 (x1, y1) 和向量 (x2, y2) 的叉积"""return x1 * y2 - x2 * y1@njit
def dot_product(x1, y1, x2, y2):"""计算向量 (x1, y1) 和向量 (x2, y2) 的点乘"""return x1 * x2 + y1 * y2@njit
def is_intersected(x1, y1, x2, y2, x3, y3, x4, y4):"""判断线段 (x1, y1)-(x2, y2) 和线段 (x3, y3)-(x4, y4) 是否相交AB×ACAB×ADCD×CACD×CB"""if (max(x1, x2) < min(x3, x4)) or (max(x3, x4) < min(x1, x2)) or (max(y1, y2) < min(y3, y4)) or (max(y3, y4) < min(y1, y2)):return Falseabx = x2 - x1aby = y2 - y1acx = x3 - x1acy = y3 - y1adx = x4 - x1ady = y4 - y1bcx = x3 - x2bcy = y3 - y2cdx = x4 - x3cdy = y4 - y3cp1 = cross_product(abx, aby, acx, acy)cp2 = cross_product(abx, aby, adx, ady)cp3 = cross_product(cdx, cdy, -acx, -acy)cp4 = cross_product(cdx, cdy, -bcx, -bcy)# 如果两个叉积的乘积小于0,则两个向量在向量 (x1, y1)-(x2, y2) 的两侧,即线段相交if ((cp1 > 0 > cp2) or (cp1 < 0 < cp2) or cp1 == 0 or cp2 == 0) and ((cp3 > 0 > cp4) or (cp3 < 0 < cp4) or cp3 == 0 or cp4 == 0):return Truereturn Falsedef test(n):res = 0for x1 in range(n):for y1 in range(n):for x2 in range(n):for y2 in range(n):if x1 == x2 and y1 == y2:continuefor x3 in range(n):for y3 in range(n):for x4 in range(n):for y4 in range(n):if x3 == x4 and y3 == y4:continueres += is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)return resif __name__ == '__main__':s = time()print(test(7))print(time() - s)
画图代码
# main.py
import matplotlib.pyplot as plt
from shapely.geometry import Point, LineString, Polygon
from shapely.plotting import plot_polygon, plot_points, plot_linefrom csdn_line_intersect import is_intersected
from figures import BLUE, GRAY, set_limitsfig = plt.figure(1, figsize=(9, 9), dpi=300)
fig.subplots_adjust(wspace=0.5, hspace=0.5) # 调整边距和子图的间距ax = fig.add_subplot(4, 4, 1)
x1, y1, x2, y2 = 1, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 3, 2
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)ax = fig.add_subplot(4, 4, 2)
x1, y1, x2, y2 = 1, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 3, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)ax = fig.add_subplot(4, 4, 3)
x1, y1, x2, y2 = 1, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 2, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)ax = fig.add_subplot(4, 4, 4)
x1, y1, x2, y2 = 1, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)ax = fig.add_subplot(4, 4, 5)
x1, y1, x2, y2 = 1, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 1, 2
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)ax = fig.add_subplot(4, 4, 6)
x1, y1, x2, y2 = 2, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 1, 2
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)ax = fig.add_subplot(4, 4, 7)
x1, y1, x2, y2 = 2, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)ax = fig.add_subplot(4, 4, 8)
x1, y1, x2, y2 = 2, 2, 3, 1
x3, y3, x4, y4 = 1, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)ax = fig.add_subplot(4, 4, 9)
x1, y1, x2, y2 = 1, 2, 3, 1
x3, y3, x4, y4 = 1, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)ax = fig.add_subplot(4, 4, 10)
x1, y1, x2, y2 = 1, 2, 3, 2
x3, y3, x4, y4 = 1, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)ax = fig.add_subplot(4, 4, 11)
x1, y1, x2, y2 = 2, 2, 3, 2
x3, y3, x4, y4 = 1, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)ax = fig.add_subplot(4, 4, 12)
x1, y1, x2, y2 = 2, 2, 3, 2
x3, y3, x4, y4 = 2, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)ax = fig.add_subplot(4, 4, 13)
x1, y1, x2, y2 = 2, 2, 3, 2
x3, y3, x4, y4 = 3, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)ax = fig.add_subplot(4, 4, 14)
x1, y1, x2, y2 = 1, 2, 3, 2
x3, y3, x4, y4 = 3, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)ax = fig.add_subplot(4, 4, 15)
x1, y1, x2, y2 = 2, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 3, 3
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)ax = fig.add_subplot(4, 4, 16)
x1, y1, x2, y2 = 1, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 3, 3
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)plt.savefig('output.png')
plt.show()
测试结果
C++: 0.0157648 s
Python(numba): 1.3376786708831787 s
Python(no numba): 3.585803985595703 s
Python(shapely): 73.45080494880676 s
相关文章:
【附代码】判断线段是否相交算法(Python,C++)
【附代码】判断线段是否相交算法(Python,C) 文章目录 【附代码】判断线段是否相交算法(Python,C)相关文献测试电脑配置基础向量旋转向量缩放向量投影推导 点乘定义推导几何意义 叉乘定义推导几何意义 判断线…...

PDF控件Spire.PDF for .NET【转换】演示:将 PDF 转换为 word、HTML、SVG、XPS
本文我们将演示如何通过调用 Spire.PDF 提供的方法 PdfDocument.SaveToStream() 将 PDF 页面转换为 HTML、Word、SVG、XPS、PDF 并将它们保存到流中。并且从Spire.PDF版本4.3开始,它新支持转换定义范围的PDF页面并将其保存到流中。 Spire.Doc 是一款专门对 Word 文…...
【FLink】水位线(Watermark)
目录 1、关于时间语义 1.1事件时间 1.2处理时间编辑 2、什么是水位线 2.1 顺序流和乱序流 2.2乱序数据的处理 2.3 水位线的特性 3 、水位线的生成 3.1 生成水位线的总体原则 3.2 水位线生成策略 3.3 Flink内置水位线 3.3.1 有序流中内置水位线设置 3.4.2 断点式…...

github访问不了问题
git clone github上的项目的时候,不是访问不了,就是克隆过程被中断了 最近找到一个代理,从代理那里clone而不是github上 GitHub代理 – 初果编程...
【Java】认识String类
文章目录 一、String类的重要性二、String类中的常用方法1.字符串构造2.String对象的比较3.字符串查找4.转换5.字符串替换6.字符串拆分7.字符串截取8.其他操作方法9.字符串的不可变性10.字符串修改 三、StringBuilder和StringBuffer 一、String类的重要性 在C语言中已经涉及到…...
算法——滑动窗口(Sliding Window)
一、背景知识 滑动窗口算法(Sliding Window): 在给定数组 / 字符串上维护一个固定长度或不定长度的窗口。可以对窗口进行滑动操作、缩放操作,以及维护最优解操作。题型一:固定长度题型二:不固定长度 二、例…...

Android异步之旅:探索AsyncTask
前言: 在Android应用程序开发中,异步操作是非常常见的需求。比如,我们可能需要在后台线程中执行网络请求、数据库操作或者其他耗时的任务,而不阻塞UI线程。为了实现这些异步操作,Android提供了多种方式,其…...

kibana 7安装
手动安装 下载 wget https://artifacts.elastic.co/downloads/kibana/kibana-7.17.15-linux-x86_64.tar.gz 解压 mv kibana-7.17.15-linux-x86_64.tar.gz /usr/local tar -zxvf kibana-7.17.15-linux-x86_64.tar.gz chown -R es:es kibana-7.17.15-linux-x86_64修改配置 s…...

为何内存不够用?微服务改造启动多个Spring Boot的陷阱与解决方案
在生产环境中我们会遇到一些问题,此文主要记录并复盘一下当时项目中的实际问题及解决过程。 背景简述 最初系统上线后都比较正常风平浪静的。在系统运行了一段时间后,业务量上升后,生产上发现java应用内存占用过高,服务器总共64…...
大模型变身双面人:虚假新闻制造机VS假新闻鉴别大师!
大家是怎样看待大型语言模型生成信息的可靠性呢? 尽管大语言模型生成的内容“像模像样”,但这些模型偶尔的失误揭示了一个关键问题:它们生成的内容并不总是真实可靠的。 那么,这种“不保真”特性能否被用来制造虚假信息呢&#x…...
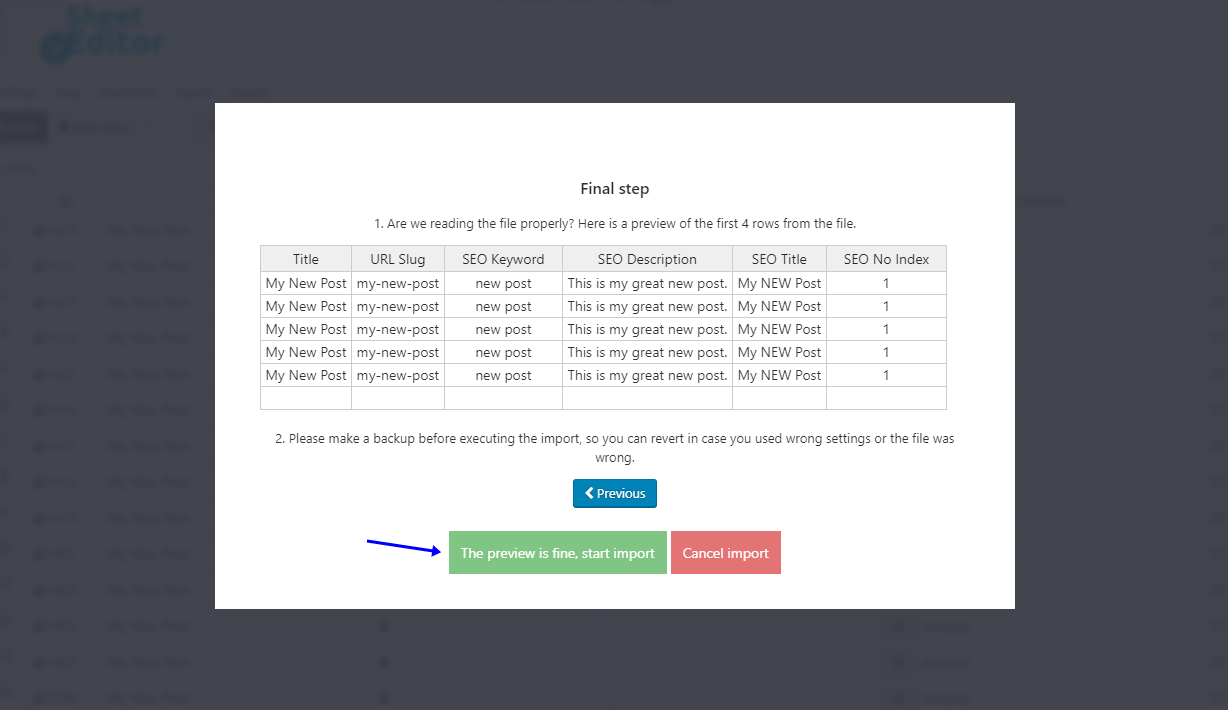
WordPress网站如何修复数千个帖子的SEO错误
在本教程中,我们将向您展示如何解决您经常犯的SEO错误。 最好的是您不必花费太多时间,因为您不需要打开并编辑每个帖子。 相反,我们将向您展示如何使用 WordPress 内的电子表格来修复 WordPress 帖子的 SEO。 在这里,我们为您提…...

Mac如何搭建Vue项目
目录 一、安装node 二、安装NPM 1、本地安装和全局安装 2、通过Node.js官方安装程序安装 3、通过Homebrew安装 三、NPM常用命令 1、查看模块的版本号 2、安装指定版本 3、卸载模块 4、更新模块 5、查看模块信息 6、查看模块地址 7、更新命令 8、卸载NPM 四、安装…...

深入 Django 的 URL 分发器
概要 在 Django 的 MVC 架构中,URL 分发器扮演着至关重要的角色,它负责将用户的请求路由到相应的视图函数或类。这一机制不仅保证了 Django 应用的高度可扩展性,还为开发者提供了灵活的 URL 设计能力。本文将详细介绍 Django 中的 URL 分发器…...
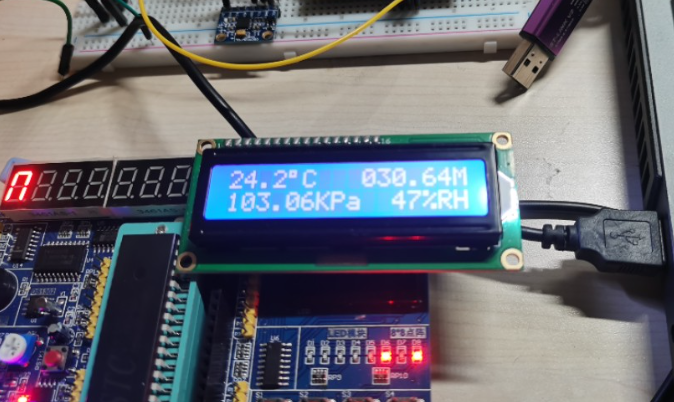
基于单片机设计的气压与海拔高度检测计(采用MPL3115A2芯片实现)
一、前言 随着科技的不断发展,在许多领域中,对气压与海拔高度的测量变得越来越重要。例如,对于航空和航天工业、气象预报、气候研究等领域,都需要高精度、可靠的气压与海拔高度检测装置。针对这一需求,基于单片机设计…...
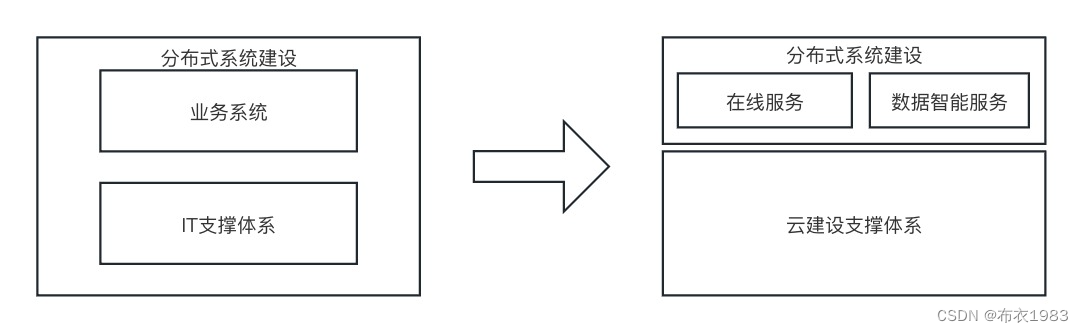
云原生入门系列(背景和驱动力)
做任何一件事,或者学习、应用一个领域的技术,莫过于先要想好阶段的目标和理解、学习它的意义是什么?解决了什么问题? 这部分,就尝试来探讨下这个阶段需要理解并达成的目标以及践行云原生的意义在哪里。 1.历程 任何阶…...

Django中间件
目录 一.介绍 1.什么是Django中间件 2.作用: 3.示例 二.Django请求生命周期流程图 三.Django中间件是Django的门户 四.中间件方法 1.必须掌握的中间件方法 (1)process_request: 示例: 2.需要了解的中间件方法 &#x…...
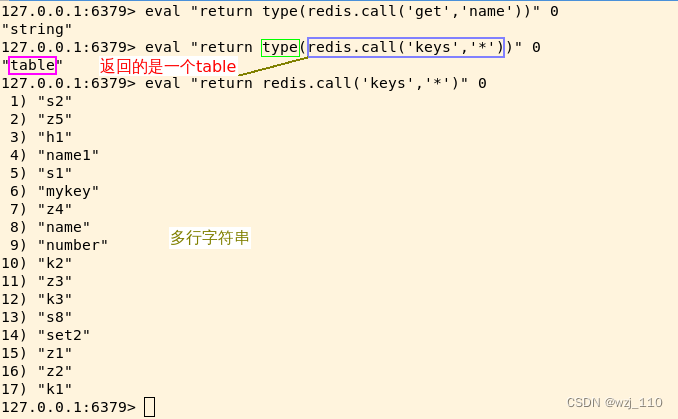
redis运维(十九)redis 的扩展应用 lua(一)
一 redis 的扩展应用 lua redis如何保证原子操作 说明:引入lua脚本,核心解决原子性问题 ① redis为什么引入lua? lua脚本本身体积小,启动速度快 ② redis引入lua的优势 小结: 类似自定义redis命令 ③ redis中如何使用lua ④ EVAL 说明&#…...

SpringBoot——MVC原理
优质博文:IT-BLOG-CN 一、SpringMVC自动配置 SpringMVC auto-configuration:SpringBoot自动配置好了SpringMVC。以下是SpringBoot对SpringMVC的默认配置:[WebMvcAutoConfiguration] 【1】包括ContentNegotiatingViewResolver和BeanNameView…...

[Linux] shell条件语句和if语句
一、条件语句 1.1 测试 test 测试文件的表达式是否成立 格式:test 条件表达式 [ 条件表达式 ] 选项作用-d测试是否为目录-e测试目录或文件是否存在-a测试目录或文件是否存在-f测试是否为文件-r测试当前用户是否有权限读取-w测试当前用户是否有权限写入-x测试当前…...
【陈老板赠书活动 - 18期】-如何成为架构师这几本书推荐给你
陈老老老板🦸 👨💻本文专栏:赠书活动专栏(为大家争取的福利,免费送书) 👨💻本文简述:生活就像海洋,只有意志坚强的人,才能到达彼岸。 👨&am…...
2026-04-28 全国各地响应最快的 BT Tracker 服务器(移动版)
数据来源:https://bt.me88.top 序号Tracker 服务器地域网络响应(毫秒)1http://211.75.205.188:6969/announce广东广州移动342http://211.75.205.187:80/announce广东佛山移动373http://211.75.210.221:6969/announce广东惠州移动374udp://107.189.7.165:6969/annou…...

终极黑苹果配置指南:OpCore-Simplify如何15分钟搞定OpenCore EFI
终极黑苹果配置指南:OpCore-Simplify如何15分钟搞定OpenCore EFI 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 还在为复杂的黑苹果配置而…...

饰品为什么需要检测,检测标准是什么
为什么需要做饰品检测饰品做检测的核心目的的是守护健康、保障权益、合规经营、保护品牌,是饰品流通与使用中不可或缺的环节,具体原因如下:一、守护贴身健康,规避安全风险饰品多长期贴身佩戴,不合格产品易带来多重健康…...

揭秘内存稳定性:Memtest86+深度解析与实战指南
揭秘内存稳定性:Memtest86深度解析与实战指南 【免费下载链接】memtest86plus Official repo for Memtest86 项目地址: https://gitcode.com/gh_mirrors/me/memtest86plus 当系统频繁崩溃、数据无故损坏,或是新硬件安装后出现难以解释的错误时&am…...

NoFences:免费开源的Windows桌面分区管理神器,打造高效整洁的工作空间
NoFences:免费开源的Windows桌面分区管理神器,打造高效整洁的工作空间 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 还在为杂乱无章的Windows桌面而…...

MCP插件性能瓶颈全解析,精准定位LSP响应延迟、上下文丢失、元数据同步失败三大致命问题
更多请点击: https://intelliparadigm.com 第一章:VS Code MCP 插件生态搭建手册概览 VS Code 的 MCP(Model Control Protocol)插件生态正成为 AI 原生开发工作流的关键基础设施。MCP 协议由 Anthropic 提出,旨在标准…...

Cursor Pro免费激活终极指南:三步解锁无限AI编程功能
Cursor Pro免费激活终极指南:三步解锁无限AI编程功能 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your tria…...

WeChatMsg:如何让微信聊天记录成为你的数字记忆博物馆?
WeChatMsg:如何让微信聊天记录成为你的数字记忆博物馆? 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trend…...

别再乱复位了!嵌入式开发中NOR Flash擦除中断的实战避坑指南
嵌入式开发中NOR Flash擦除中断的实战避坑指南 在嵌入式系统开发中,NOR Flash因其高可靠性和快速随机读取特性,常被用于存储启动代码、操作系统内核等关键数据。然而,当系统遭遇意外复位或电源故障时,正在进行的Flash擦除操作可能…...

零代码打造自然对话语音界面:ChatTTS WebUI全功能详解
零代码打造自然对话语音界面:ChatTTS WebUI全功能详解 【免费下载链接】ChatTTS A generative speech model for daily dialogue. 项目地址: https://gitcode.com/GitHub_Trending/ch/ChatTTS ChatTTS 是一款专注于日常对话的生成式语音模型,能够…...