激光雷达与惯导标定 | Lidar_IMU_Init : 编译
激光雷达与惯导标定:Lidar_IMU_Init 编译
- 功能包安装
- 安装ceres-solver-2.0.0 (注意安装2.2.0不行,必须要安装2.0.0)
LI-Init是一种鲁棒、实时的激光雷达惯性系统初始化方法。该方法可校准激光雷达与IMU之间的时间偏移量和外部参数,以及重力矢量和IMU偏差。我们的方法不需要任何目标或额外的传感器,特定的结构化环境,先前的环境点图或初始值的外在和时间偏移。
功能包安装
需要环境要求:
Ubuntu >= 18.04.
ROS >= Melodic
PCL >= 1.8
Eigen >= 3.3.4
下载源码
git clone https://github.com/hku-mars/LiDAR_IMU_Init.git
下载完成提示
正克隆到 ‘LiDAR_IMU_Init’…
remote: Enumerating objects: 340, done.
remote: Counting objects: 100% (118/118), done.
remote: Compressing objects: 100% (62/62), done.
remote: Total 340 (delta 79), reused 78 (delta 55), pack-reused 222
接收对象中: 100% (340/340), 46.43 MiB | 2.57 MiB/s, 完成.
处理 delta 中: 100% (161/161), 完成.
拷贝到工作空间中进行编译
报错提示如下:
CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by “livox_ros_driver”
with any of the following names:
livox_ros_driverConfig.cmake
livox_ros_driver-config.cmake
Add the installation prefix of “livox_ros_driver” to CMAKE_PREFIX_PATH or
set “livox_ros_driver_DIR” to a directory containing one of the above
files. If “livox_ros_driver” provides a separate development package or
SDK, be sure it has been installed.
Call Stack (most recent call first):
LiDAR_IMU_Init/CMakeLists.txt:45 (find_package)
原因是该功能包的CMakeLists.txt文件中的第45行:
find_package(catkin REQUIRED COMPONENTSgeometry_msgsnav_msgssensor_msgsroscpprospystd_msgspcl_rostflivox_ros_driver #需要这个功能包但是没有找到message_generationeigen_conversions
)
需要livox_ros_driver这个功能包但是没有找到
安装这个功能包,需要提前下载安装好Livox SDK
git clone https://github.com/Livox-SDK/Livox-SDK.git
cd Livox-SDK
cd build && cmake ..
成功后提示:
– Configuring done
– Generating done
– Build files have been written to: /home/jk-jone/Livox-SDK/build

make
成功后提示:
[100%] Linking CXX executable lidar_utc_sync
[100%] Built target lidar_utc_sync

sudo make install
成功后提示:
– Install configuration: “”
– Installing: /usr/local/lib/liblivox_sdk_static.a
– Installing: /usr/local/include/livox_def.h
– Installing: /usr/local/include/livox_sdk.h

下载livox_ros_driver功能包
git clone https://github.com/Livox-SDK/livox_ros_driver.git
放到工作空间中进行编译
则不再提示
Could not find a package configuration file provided by “livox_ros_driver”
再次编译提示缺少Ceres功能包
Make Error at LiDAR_IMU_Init/CMakeLists.txt:61 (find_package):
By not providing “FindCeres.cmake” in CMAKE_MODULE_PATH this project has
asked CMake to find a package configuration file provided by “Ceres”, but
CMake did not find one.
Could not find a package configuration file provided by “Ceres” with any of
the following names:
CeresConfig.cmake
ceres-config.cmake
Add the installation prefix of “Ceres” to CMAKE_PREFIX_PATH or set
“Ceres_DIR” to a directory containing one of the above files. If “Ceres”
provides a separate development package or SDK, be sure it has been
installed.
安装ceres-solver-2.0.0 (注意安装2.2.0不行,必须要安装2.0.0)
先安装ceres依赖
sudo apt-get install cmake
sudo apt-get install libgoogle-glog-dev libgflags-dev
sudo apt-get install libatlas-base-dev
sudo apt-get install libeigen3-dev
下载ceres-solver-2.0.0
git clone https://github.com/ceres-solver/ceres-solver # 这个版本不行
git clone -b 2.0.0 https://github.com/ceres-solver/ceres-solver.git
下载完成后形成该文件
然后进行编译
cd ceres-solver
mkdir build
cd build
cmake ..
成功后提示
– Build the examples.
– Configuring done
– Generating done
– Build files have been written to: /home/jk-jone/ceres-solver/build

然后再进行make
make -j4
成功后显示:
[ 99%] Built target ba_iterschur_suitesparse_clusttri_user_test
[100%] Linking CXX executable …/…/…/bin/ba_sparsecholesky_suitesparse_user_threads_test
[100%] Built target ba_sparsecholesky_suitesparse_user_threads_test

最后进行安装
sudo make install
成功后显示 :
– Installing: /usr/local/include/ceres/internal/config.h
– Installing: /usr/local/include/ceres/internal/export.h
– Installing: /usr/local/lib/cmake/Ceres/CeresTargets.cmake
– Installing: /usr/local/lib/cmake/Ceres/CeresTargets-release.cmake
– Installing: /usr/local/lib/cmake/Ceres/CeresConfig.cmake
– Installing: /usr/local/lib/cmake/Ceres/CeresConfigVersion.cmake
– Installing: /usr/local/lib/cmake/Ceres/FindGlog.cmake
至此Ceres-solver-2.0.0安装完毕
这个功能包对ceres-solver的版本有要求,2.2.0的版本有问题,需要2.0.0的版本
再次对工作空间进行编译
编译成功
相关文章:
激光雷达与惯导标定 | Lidar_IMU_Init : 编译
激光雷达与惯导标定:Lidar_IMU_Init 编译 功能包安装安装ceres-solver-2.0.0 (注意安装2.2.0不行,必须要安装2.0.0) LI-Init是一种鲁棒、实时的激光雷达惯性系统初始化方法。该方法可校准激光雷达与IMU之间的时间偏移量和外部参数…...

进程池,线程池与跨进程数据共享爬取某岸网图片
看教程的时候看到一个,生产者跟消费者的概念比较有意思,但是给的代码有问题无法正常运行,于是我就捣鼓了一下。 基本概念就是: 生产者: 一个进程获取网页没页的图片连接(主进程…...

【 图片加载】Vue前端各种图片引用
文章目录 一、图片作为js常量(常作为配置项的值 )1、在线链接2、本地图片 二、图片img标签1、一般的src2、动态的src用require3、src可以接收二进制文件blob(如后端返回的、a-upload传的图片) 三、背景图片 一、图片作为js常量(常…...
thinkphp6生成PDF自动换行
composer安装 composer require tecnickcom/tcpdf 示例 use TCPDF;public function info($university,$performance,$grade,$major){//获取到当前域名$domain request()->domain();//实例化$pdf new TCPDF(P, mm, A4, true, UTF-8, false);// 设置文档信息$pdf->SetCr…...

wpf devexpress实现输入验证使用验证规则
打开此项目 目标是一个registration form行为像google registration form。打开Google registration form 研究它的行为。当form是第一次显示,它的“Register”按钮应该启动;编辑器没有提示任何输入错误。输入First Name编辑器字段,清理输入…...

Vue表单的整体处理
在前端的处理中,表单的处理永远是占高比例的。在BOMDOMjs的时候是这样,在Vue的时候也是这样。Vue的表单处理做了特别的优化,如值绑定、数据验证、错误提示、修饰符等。 表单组件的示例: <script setup lang"ts">…...
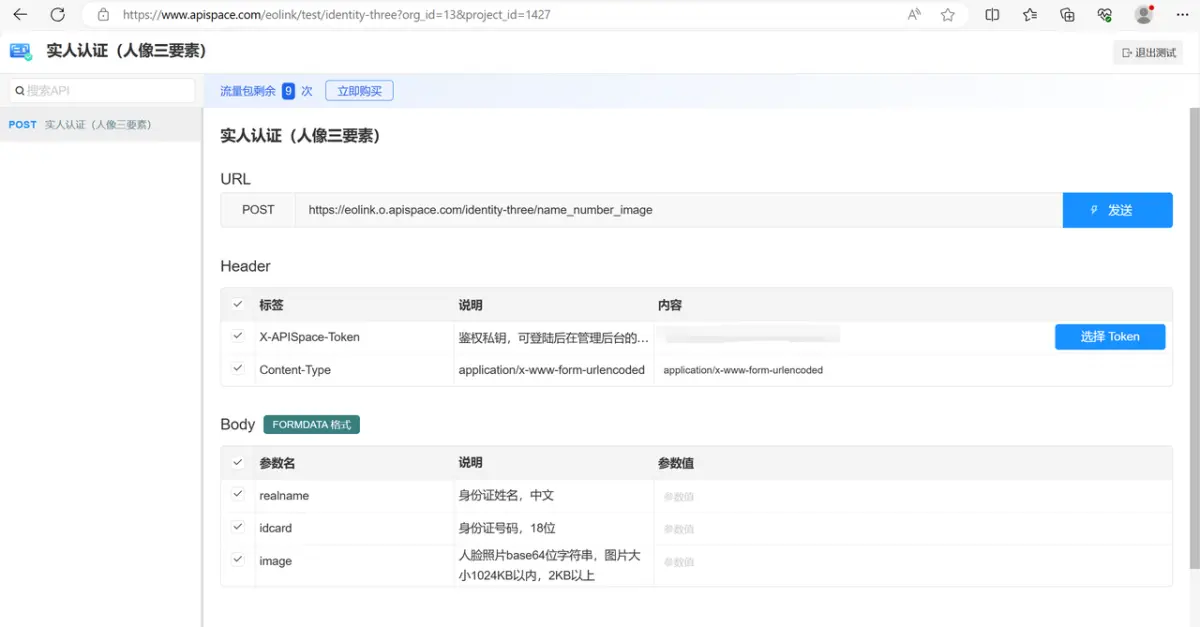
探索实人认证API:保障在线交互安全的关键一步
前言 在数字化时代,随着人们生活的日益数字化,各种在线服务的普及,安全性成为用户体验的至关重要的一环。特别是在金融、电商、社交等领域,确保用户身份的真实性显得尤为重要。而实人认证API作为一种先进的身份验证技术ÿ…...

XDR 网络安全:技术和最佳实践
扩展检测和响应(XDR)是一种安全方法,它将多种保护工具集成到一个统一的集成解决方案中。它为组织提供了跨网络、端点、云工作负载和用户的广泛可见性,从而实现更快的威胁检测和响应。 XDR的目标是提高威胁检测的速度和准确性&…...

【如何学习Python自动化测试】—— 警告框处理
7 、 警告框处理 在 web 中,除了上面提到的元素和操作之外,还有就是页面的提示框的处理了,页面的警告框通常分为这几类 js:alert 、 confirm 以及 prompt,这些警告框,我们都可以通过 switch_to_alert()来处…...
Jenkins Ansible 参数构建
首先在Jenkins中创建自由项目 在web端配置完成后在另一台机子上下载nginx 在gitlab端创建项目并创建文件配置代码 在有Jenkins的机器上下载Ansible [rootslave1 ~]# yum -y install epel-release [rootslave1 ~]# yum -y install ansible再进入下载nginx机器中克隆gitlab项目…...

第十五届蓝桥杯(Web 应用开发)模拟赛 1 期-大学组(详细分析解答)
目录 1.动态的Tab栏 1.1 题目要求 1.2 题目分析 1.3 源代码 2.地球环游 2.1 题目要求 2.2 题目分析 2.3 源代码 3.迷惑的this 3.1 题目要求 3.2 题目分析 3.3 源代码 4.魔法失灵了 4.1 题目要求 4.2 题目分析 4.3 源代码 5.燃烧你的卡路里 5.1 题目要求 5.2…...

2023亚太杯数学建模B题思路+模型+代码+论文
2023亚太地区数学建模A题思路:开赛后第一时间更新,获取见文末 名片 2023亚太地区数学建模B题思路:开赛后第一时间更新,获取见文末 名片 2023亚太地区数学建模C题思路:开赛后第一时间更新,获取见文末 名片…...

GitHub 报告发布:TypeScript 取代 Java 成为第三受欢迎语言
GitHub发布的2023年度Octoverse开源状态报告发布,研究围绕AI、云和Git的开源活动如何改变开发人员体验,以及在开发者和企业中产生的影响。报告发现了三大趋势: 1、生成式AI的广泛应用: 开发人员大量使用生成式AI进行构建。越来越…...

配置hikari数据库连接池时多数据源不生效
1.原始配置,改造前: spring:# 配置数据源信息datasource:dynamic:#设置默认的数据源或者数据源组,默认值即为masterprimary: masterstrict: truedatasource:#这里采用了配置文件取值的方式,可以直接替换为数据库连接master:url: jdbc:postgr…...

matlab 最小二乘拟合平面并与XOY平面对齐
目录 一、算法原理二、代码实现1、绕原点对齐2、绕质心对齐三、结果展示1、绕原点对齐2、绕质心对齐四、测试数据本文由CSDN点云侠原创,原文链接。爬虫网站自重。如果你不是在点云侠的博客中看到该文章,那么此处便是不要脸的爬虫。 一、算法原理 首先,使用最小二乘拟合平面…...
jQuery【回到顶部、Swiper轮播图、立即执行函数、链式调用、参数重载、jQuery扩展】(六)-全面详解(学习总结---从入门到深化)
目录 回到顶部 Swiper轮播图 jQuery源码_立即执行函数 jQuery源码_链式调用 jQuery源码_参数重载 jQuery扩展 回到顶部 <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta http-equiv"X-UA-Compati…...

day60
choice参数 1.引入 以一张信息表为例 性别 学历 工作经验 是否婚配 是否生子 客户来源 ... 针对某个可以列举完全的可能性字段,我们应该如何存储 只要某个字段的可能性时列举完全的,那么一般情况下都会采用choice参数 2.数据准备 from random imp…...

thingsboard的WebSocket API的使用
1、参考文档 Working with telemetry data | ThingsBoard Community Edition 2、订阅的命令 我们需要订阅不同的数据,那么该如何来填写参数呢,你需要参考后端代码 TelemetryPluginCmdsWrapper 以及订阅返回的结果参考类:TelemetrySubscriptionUpdate 链接地址: https:/…...
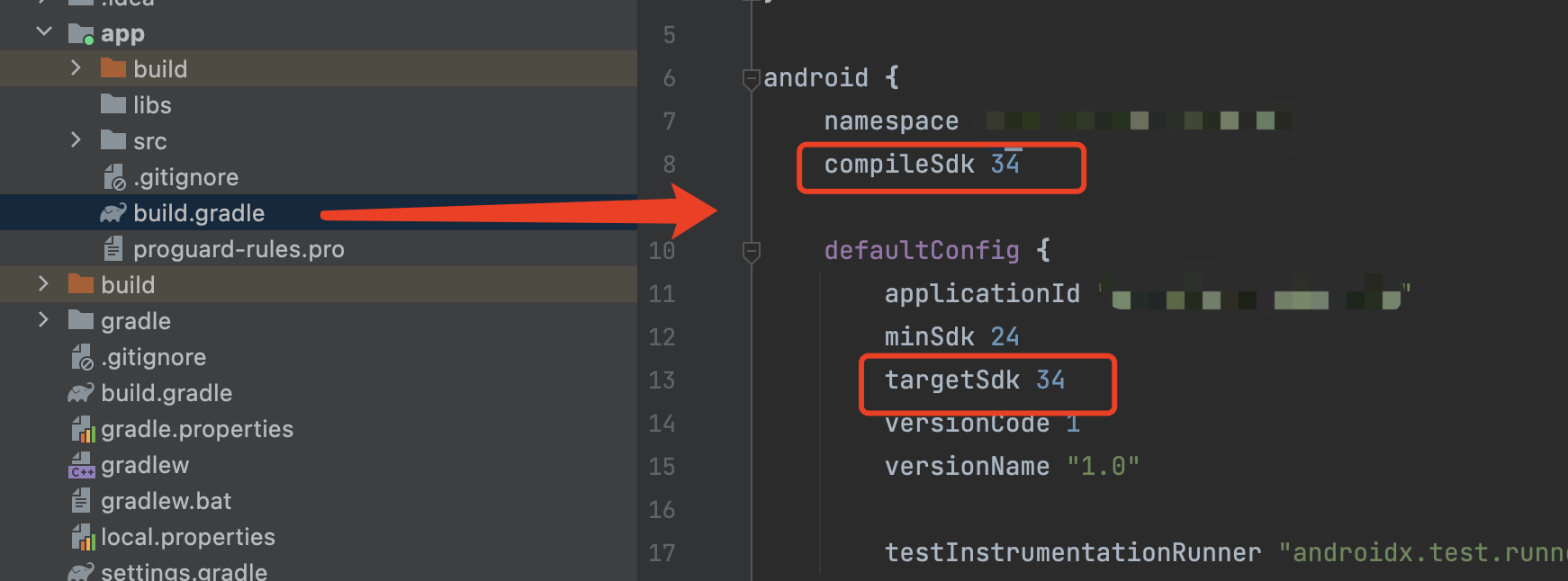
An issue was found when checking AAR metadata
一、报错信息 An issue was found when checking AAR metadata:1. Dependency androidx.activity:activity:1.8.0 requires libraries and applications that depend on it to compile against version 34 or later of the Android APIs.:app is currently compiled against …...

搭建线上jvm监控
这里写目录标题 Springboot项目配置maven依赖application.properties添加监控JVM的配置类启动springboot项目 Prometheus配置配置grafana Springboot项目配置 maven依赖 <dependency><groupId>org.springframework.boot</groupId><artifactId>spring…...

RISC-V向量处理器AX45MPV架构解析与应用
1. AndesCore AX45MPV RISC-V处理器深度解析在RISC-V生态快速发展的当下,Andes Technology最新发布的AX45MPV处理器核心无疑为高性能向量计算领域投下了一枚重磅炸弹。作为一名长期跟踪RISC-V架构发展的技术观察者,我认为这款产品标志着RISC-V在AI和多媒…...

机器学习战略:从失败案例看问题定义的重要性
1. 为什么机器学习战略比技术本身更重要?在过去的十年里,我见过太多机器学习项目以失败告终——不是因为模型不够精准,而是因为从一开始就走错了方向。记得2018年参与的一个电商推荐系统项目,团队花了六个月优化AUC指标࿰…...

LangGraph 状态管理完全指南:从零到一掌握图状态机的核心利器
状态管理,是LangGraph构建复杂AI智能体的基石。如果把节点比作智能体的“手脚”,状态就是智能体的“大脑”——它记录着任务执行过程中的一切信息,决定着每一步决策的准确性。状态设计得好,智能体就聪明;状态设计得差&…...

线性代数实战:矩阵运算在AI与工程中的应用指南
1. 线性代数实战精要:拒绝空谈的矩阵思维训练手册刚接手机器学习项目时,我对着特征矩阵发懵的日子还历历在目。当时翻遍教材只看到满页的数学符号推导,却找不到"什么时候该用特征分解"、"为什么SVD能解决推荐系统冷启动"…...

工业级Wi-Fi 7接入点EKI-6333BE-4GD技术解析与应用
1. 工业级Wi-Fi 7接入点EKI-6333BE-4GD深度解析在工业自动化和机器人技术快速发展的今天,稳定可靠的无线网络连接已成为关键基础设施。研华科技(Advantech)最新推出的EKI-6333BE-4GD工业级Wi-Fi 7接入点,正是为满足这一需求而设计…...

易语言本地网络验证系统源码免服务器
带简单的防破解和加密解密。 需要的自己下载吧。 我用夸克网盘分享了「本地验证l例程.zip」,点击链接即可保存。打开「夸克APP」,无需下载在线播放视频,畅享原画5倍速,支持电视投屏。 链接:https://pan.quark.cn/s/d97…...

Meteor云原生:Kubernetes集群部署终极指南
Meteor云原生:Kubernetes集群部署终极指南 【免费下载链接】meteor Meteor, the JavaScript App Platform 项目地址: https://gitcode.com/gh_mirrors/me/meteor Meteor作为JavaScript应用平台,提供了从开发到部署的全栈解决方案。本文将详细介绍…...

从电池装配到整车下线:YC8000-Q赋能三菱PLC的产线互联方案
一、行业背景与项目概况1.1 新能源汽车制造行业技术需求新能源汽车制造是高端装备制造的核心赛道,其产线需实现焊接、装配、检测等工序的高度自动化与数据互联互通,核心诉求涵盖设备协同联动、数据实时采集、远程运维效率提升,以保障产品一致…...

《深耕QClaw协作逻辑,构建无误解的智能体沟通体系》
很多人以为多Agent协同的瓶颈是算力或者模型能力,其实真正拖垮整个系统效率的,是那些看不见摸不着的沟通误解。两个看似都很聪明的Agent,可能会因为对同一个词的不同理解,在同一个问题上反复拉扯几个小时,最后产出一堆毫无价值的内容。这种情况在复杂任务中尤为常见,尤其…...

python argparse
### 聊聊 Python 里的 argparse:命令行参数处理那点事 1. 它是什么 argparse 是 Python 标准库里的一个模块,专门用来解析命令行参数。有人可能会说,处理参数不就是 sys.argv 切一切、判断一下吗?确实可以,但那种方式就…...