多智能体集群协同控制笔记(1):线性无领航多智能体系统的一致性
对于连续时间高阶线性多智能体系统的状态方程为:
x˙i(t)=Axi(t)+Bui(t),i=1,2..N\dot {\mathbf{x}}_i(t)=A\mathbf{x}_i(t)+B\mathbf{u}_i(t),i=1,2..N x˙i(t)=Axi(t)+Bui(t),i=1,2..N
下标iii代表第iii个智能体,ui(t)∈Rq×1\mathbf{u}_i(t)\in R^{q \times 1}ui(t)∈Rq×1表示第iii个智能体的控制输入变量,xi(t)∈Rp×1\mathbf{x}_i(t)\in R^{p \times 1}xi(t)∈Rp×1表示第iii个智能体的状态变量。系统的一致性即设计控制器ui(t)\mathbf{u}_i(t)ui(t)保证如下等式成立:
limt→∞x1(t)=limt→∞x2(t)=...=limt→∞xN(t)\lim_{t\rightarrow\infty}\mathbf{x}_1(t)=\lim_{t\rightarrow\infty}\mathbf{x}_2(t)=...=\lim_{t\rightarrow\infty}\mathbf{x}_N(t) t→∞limx1(t)=t→∞limx2(t)=...=t→∞limxN(t)
-
定义Laplacian矩阵L={lij}i,j=1,..NL=\{l_{ij}\}_{i,j=1,..N}L={lij}i,j=1,..N,其中:
lij={∑j=1,j≠iNaiji=j−aiji≠jl_{ij}=\begin{cases} \sum_{j=1,j\ne i}^Na_{ij} & i = j\\ -a_{ij}& i\ne j \end{cases} lij={∑j=1,j=iNaij−aiji=ji=j -
定义变量:ξi(t)=∑j=1Naij(xi(t)−xj(t))\mathbf{\xi}_i(t)=\sum_{j=1}^Na_{ij}(\mathbf{x}_i(t)-\mathbf{x}_j(t))ξi(t)=∑j=1Naij(xi(t)−xj(t)),定义:
ξ(t)=(L⊗Ip)X(t)\mathbf{\xi}(t)=(L\otimes I_p)X(t) ξ(t)=(L⊗Ip)X(t)
其中:X(t)=[x1T(t),x2T(t),..xNT(t)]TX(t)=[\mathbf{x}_1^T(t),\mathbf{x}_2^T(t),..\mathbf{x}_N^T(t)]^TX(t)=[x1T(t),x2T(t),..xNT(t)]T,ξ(t)=[ξ1(t)T,ξ2(t)T,..ξN(t)T]T\mathbf{\xi}(t)=[\mathbf{\xi}_1(t)^T,\mathbf{\xi}_2(t)^T,..\mathbf{\xi}_N(t)^T]^Tξ(t)=[ξ1(t)T,ξ2(t)T,..ξN(t)T]T; -
定义控制器:ui(t)=cK1ξi(t)\mathbf{u}_i(t)=cK_1\mathbf{\xi}_i(t)ui(t)=cK1ξi(t),总的控制策略为:
u(t)=(IN⊗cK1)ξ(t)=(IN⊗cK1)(L⊗Ip)X(t)\mathbf{u}(t)=(I_N\otimes cK_1)\mathbf{\xi}(t) =(I_N\otimes cK_1)(L\otimes I_p)X(t) u(t)=(IN⊗cK1)ξ(t)=(IN⊗cK1)(L⊗Ip)X(t)
其中K1K_1K1是待求的控制增益矩阵,ccc为加权参数; -
定义LLL为该系统的Laplacian矩阵,存在一个酉矩阵YYY,使得:
YTLY=diag(λ1,λ2,...λN)Y^TLY=\mathbf{diag}(\lambda_1,\lambda_2,...\lambda_N) YTLY=diag(λ1,λ2,...λN)
其中:λ1=0;λi>0,i∈{2,3,..N}\lambda_1=0;\lambda_i >0,i \in \{ 2,3,..N\}λ1=0;λi>0,i∈{2,3,..N},由于LLL有右特征向量1N\mathbf{1}_N1N,YYY可以写成:
Y=[1NN,M1]Y=[\frac{\mathbf{1}_N}{\sqrt{N}}, M_1] Y=[N1N,M1] -
定义:ε(t)=[ε1(t)T,ε2(t)T,..εN(t)T]T=(YT⊗Ip)ξ(t)\mathbf{\varepsilon}(t)=[\mathbf{\varepsilon}_1(t)^T,\mathbf{\varepsilon}_2(t)^T,..\mathbf{\varepsilon}_N(t)^T]^T=(Y^T\otimes I_p)\mathbf{\xi}(t)ε(t)=[ε1(t)T,ε2(t)T,..εN(t)T]T=(YT⊗Ip)ξ(t),其中ppp为xi(t)\mathbf{x}_i(t)xi(t)的维度。
1.无向连通图定理
引理1.1: 当多智能体系统网络为无向连通图时,系统实现状态一致的充要条件是:
εˉ(t)=[ε2(t)T,ε3(t)T,..εN(t)T]T=0\mathbf{\bar \varepsilon}(t)=[\mathbf{\varepsilon}_2(t)^T,\mathbf{\varepsilon}_3(t)^T,..\mathbf{\varepsilon}_N(t)^T]^T=\mathbf{0} εˉ(t)=[ε2(t)T,ε3(t)T,..εN(t)T]T=0
且εˉ(t)\bar{\varepsilon}(t)εˉ(t)同时也满足:
ε˙(t)=(IN⊗A+cΛN⊗BK1)ε(t)εˉ˙(t)=(IN−1⊗A+cΛN−1⊗BK1)εˉ(t)(∗)\dot \varepsilon(t) = (I_N\otimes A+c\Lambda_N \otimes BK_1)\varepsilon(t)\\ \dot{\bar{\varepsilon}}(t) = (I_{N-1}\otimes A+c\Lambda_{N-1} \otimes BK_1)\bar{\varepsilon}(t) \quad (*) ε˙(t)=(IN⊗A+cΛN⊗BK1)ε(t)εˉ˙(t)=(IN−1⊗A+cΛN−1⊗BK1)εˉ(t)(∗)
其中:ΛN−1=diag(λ2,...λN)\Lambda_{N-1}=diag(\lambda_2,...\lambda_N)ΛN−1=diag(λ2,...λN),ΛN=diag(λ1,λ2,...λN)\Lambda_{N}=diag(\lambda_1,\lambda_2,...\lambda_N)ΛN=diag(λ1,λ2,...λN)。
定理1.1:给定矩阵Q1=Q1T>0Q_1=Q_1^T>0Q1=Q1T>0和R1=R1T>0R_1=R_1^T>0R1=R1T>0,若如下Riccati方程有正定解P1=P1T>0P_1=P_1^T>0P1=P1T>0:
P1A+AP1T+Q1−P1BR1−1BTP1=0P_1A+AP_1^T+Q_1-P_1BR_1^{-1}B^TP_1=\mathbf{0} P1A+AP1T+Q1−P1BR1−1BTP1=0
则系统(∗)(*)(∗)渐进稳定,由引理1.1可知,原系统能达到一致性。
其中系统的控制增益矩阵K1=−R1−1BTP1K_1=-R_1^{-1}B^TP_1K1=−R1−1BTP1,且加权系数ccc满足c≥12mini=2,...Nλi(L)c\geq\frac{1}{2\min_{i=2,...N}{\lambda_i(L)}}c≥2mini=2,...Nλi(L)1。
证明:构造Lyapunov函数V1(t)=0.5εˉT(t)(IN−1⊗P1)εˉ(t)V_1(t)=0.5\bar{\varepsilon}^T(t)(I_{N-1}\otimes P_1)\bar{\varepsilon}(t)V1(t)=0.5εˉT(t)(IN−1⊗P1)εˉ(t),其满足:
V1˙(t)=0.5εˉ˙T(t)(IN−1⊗P1)εˉ(t)+0.5εˉT(t)(IN−1⊗P1)εˉ˙(t)=εˉT(t)(IN−1⊗P1)εˉ˙(t)=εˉ(t)T(IN−1⊗P1)(IN−1⊗A+cΛN−1⊗BK1)εˉ(t)=εˉT(t)(IN−1⊗P1A+cΛN−1⊗P1BK1)εˉ(t)=εˉT(t)(IN−1⊗P1A−cΛN−1⊗P1BR1−1BTP1)εˉ(t)\dot{V_1}(t)=0.5\dot{\bar{\varepsilon}}^T(t)(I_{N-1}\otimes P_1)\bar{\varepsilon}(t)+0.5\bar{\varepsilon}^T(t)(I_{N-1}\otimes P_1)\dot{\bar{\varepsilon}}(t)\\ =\bar{\varepsilon}^T(t)(I_{N-1}\otimes P_1)\dot{\bar{\varepsilon}}(t)\\=\bar{\varepsilon}(t)^T(I_{N-1}\otimes P_1)(I_{N-1}\otimes A+c\Lambda_{N-1} \otimes BK_1)\bar{\varepsilon}(t)\\=\bar{\varepsilon}^T(t)(I_{N-1}\otimes P_1A+c\Lambda_{N-1}\otimes P_1BK_1)\bar{\varepsilon}(t)\\=\bar{\varepsilon}^T(t)(I_{N-1}\otimes P_1A-c\Lambda_{N-1}\otimes P_1BR_1^{-1}B^TP_1)\bar{\varepsilon}(t) V1˙(t)=0.5εˉ˙T(t)(IN−1⊗P1)εˉ(t)+0.5εˉT(t)(IN−1⊗P1)εˉ˙(t)=εˉT(t)(IN−1⊗P1)εˉ˙(t)=εˉ(t)T(IN−1⊗P1)(IN−1⊗A+cΛN−1⊗BK1)εˉ(t)=εˉT(t)(IN−1⊗P1A+cΛN−1⊗P1BK1)εˉ(t)=εˉT(t)(IN−1⊗P1A−cΛN−1⊗P1BR1−1BTP1)εˉ(t)
由于c≥12mini=2,...Nλi(L)c\geq\frac{1}{2\min_{i=2,...N}{\lambda_i(L)}}c≥2mini=2,...Nλi(L)1,因此cΛN−1≥IN−12c\Lambda_{N-1}\geq\frac{I_{N-1}}{2}cΛN−1≥2IN−1。带入上式有:
V1˙(t)=εˉT(t)(IN−1⊗P1A−cΛN−1⊗P1BR1−1BTP1)εˉ(t)≤εˉT(t)(IN−1⊗P1A−IN−12⊗P1BR1−1BTP1)εˉ(t)=εˉT(t)(IN−12⊗(P1A+ATP1)−IN−12⊗P1BR1−1BTP1)εˉ(t)=−12εˉT(t)(IN−1⊗Q1)εˉ(t)\dot{V_1}(t)=\bar{\varepsilon}^T(t)(I_{N-1}\otimes P_1A-c\Lambda_{N-1}\otimes P_1BR_1^{-1}B^TP_1)\bar{\varepsilon}(t)\\ \leq \bar{\varepsilon}^T(t)(I_{N-1}\otimes P_1A-\frac{I_{N-1}}{2}\otimes P_1BR_1^{-1}B^TP_1)\bar{\varepsilon}(t)\\=\bar{\varepsilon}^T(t)( \frac{I_{N-1}}{2}\otimes (P_1A+A^TP_1) -\frac{I_{N-1}}{2}\otimes P_1BR_1^{-1}B^TP_1)\bar{\varepsilon}(t)\\=-\frac{1}{2}\bar{\varepsilon}^T(t)(I_{N-1}\otimes Q_1)\bar{\varepsilon}(t) V1˙(t)=εˉT(t)(IN−1⊗P1A−cΛN−1⊗P1BR1−1BTP1)εˉ(t)≤εˉT(t)(IN−1⊗P1A−2IN−1⊗P1BR1−1BTP1)εˉ(t)=εˉT(t)(2IN−1⊗(P1A+ATP1)−2IN−1⊗P1BR1−1BTP1)εˉ(t)=−21εˉT(t)(IN−1⊗Q1)εˉ(t)
由直积的性质有:
λmin(IN−1⊗Q1)=λmin(Q1)λmax(IN−1⊗P1)=λmax(P1)\lambda_{\min}(I_{N-1}\otimes Q_1)=\lambda_{\min}(Q_1)\\ \lambda_{\max}(I_{N-1}\otimes P_1)=\lambda_{\max}(P_1) λmin(IN−1⊗Q1)=λmin(Q1)λmax(IN−1⊗P1)=λmax(P1)
由矩阵的极大极小值原理:
V1˙(t)V1(t)=−12εˉT(t)(IN−1⊗Q1)εˉ(t)12εˉT(t)(IN−1⊗P1)εˉ(t)≤−λmin(Q1)εˉT(t)εˉ(t)λmax(P1)εˉT(t)εˉ(t)=−λmin(Q1)λmax(P1)=−δ\frac{\dot{V_1}(t)}{V_1(t)}=\frac{-\frac{1}{2}\bar{\varepsilon}^T(t)(I_{N-1}\otimes Q_1)\bar{\varepsilon}(t)}{\frac{1}{2}\bar{\varepsilon}^T(t)(I_{N-1}\otimes P_1)\bar{\varepsilon}(t)}\leq-\frac{\lambda_{\min}(Q_1)\bar{\varepsilon}^T(t)\bar{\varepsilon}(t)}{\lambda_{\max}(P_1)\bar{\varepsilon}^T(t)\bar{\varepsilon}(t) }=-\frac{\lambda_{\min}(Q_1)}{\lambda_{\max}(P_1)}=-\delta V1(t)V1˙(t)=21εˉT(t)(IN−1⊗P1)εˉ(t)−21εˉT(t)(IN−1⊗Q1)εˉ(t)≤−λmax(P1)εˉT(t)εˉ(t)λmin(Q1)εˉT(t)εˉ(t)=−λmax(P1)λmin(Q1)=−δ
解上述不等式有:
V1(t)≤V1(0)e−δtV_1(t)\leq V_1(0)e^{-\delta t} V1(t)≤V1(0)e−δt
带入V1(t)≥0.5λmin(P1)∣∣εˉ(t)∣∣2V_1(t)\geq 0.5\lambda_{\min}(P_1)||\bar{\varepsilon}(t)||^2V1(t)≥0.5λmin(P1)∣∣εˉ(t)∣∣2 和V1(0)≤0.5λmax(P1)∣∣εˉ(0)∣∣2V_1(0)\leq 0.5\lambda_{\max}(P_1)||\bar{\varepsilon}(0)||^2V1(0)≤0.5λmax(P1)∣∣εˉ(0)∣∣2有:
∣∣εˉ(t)∣∣≤λmax(P1)λmin(P1)∣∣εˉ(0)∣∣e−δt2||\bar{\varepsilon}(t)||\leq \sqrt\frac{\lambda_{\max}(P_1)}{\lambda_{\min}(P_1)}||\bar{\varepsilon}(0)||e^{\frac{-\delta t}{2}} ∣∣εˉ(t)∣∣≤λmin(P1)λmax(P1)∣∣εˉ(0)∣∣e2−δt
因此上述系统(*)是一致指数稳定的,其必然是渐进稳定的。
2.仿真
2.1 问题
设固定翼无人机集群中每个无人机的俯仰方向运动模型的线性化系统方程为:
(α˙(t)q˙(t))=(−1.1750.9871−8.458−0.8776)(α(t)q(t))+(−0.194−0.03593−19.29−3.803)(δiail(t)δirud(t))\begin{pmatrix} \dot{\alpha}(t) \\ \dot{q}(t) \end{pmatrix} = \begin{pmatrix} -1.175&0.9871\\-8.458&-0.8776 \end{pmatrix} \begin{pmatrix} {\alpha}(t) \\ {q}(t) \end{pmatrix}+ \begin{pmatrix} -0.194&-0.03593\\-19.29&-3.803 \end{pmatrix}\begin{pmatrix} {\delta}_i^{\mathbf{ail}}(t) \\ {\delta}_i^{\mathbf{rud}}(t) \end{pmatrix} (α˙(t)q˙(t))=(−1.175−8.4580.9871−0.8776)(α(t)q(t))+(−0.194−19.29−0.03593−3.803)(δiail(t)δirud(t))
其中:α(t)\alpha(t)α(t):无人机俯仰角;qi(t)q_i(t)qi(t):无人机俯仰角速度;
δail(t)\delta^{\mathbf{ail}}(t)δail(t):副翼操作指令;δrud(t)\delta^{\mathbf{rud}}(t)δrud(t):升降舵操作指令;
先有3架无人机,其通信拓扑图如下:

3架无人机的初值为:
(α1(0)q1(0))=(10−3);(α2(0)q2(0))=(−72);(α3(0)q3(0))=(4−1)\begin{pmatrix} {\alpha}_1(0) \\ {q}_1(0) \end{pmatrix}=\begin{pmatrix} 10\\ -3\end{pmatrix}; \begin{pmatrix} {\alpha}_2(0) \\ {q}_2(0) \end{pmatrix}=\begin{pmatrix} -7\\ 2\end{pmatrix}; \begin{pmatrix} {\alpha}_3(0) \\ {q}_3(0) \end{pmatrix}=\begin{pmatrix} 4\\ -1\end{pmatrix} (α1(0)q1(0))=(10−3);(α2(0)q2(0))=(−72);(α3(0)q3(0))=(4−1)
设计控制策略使3架无人机能完成俯仰角与俯仰角速度上的一致性。
2.2 求解
A=(−1.1750.9871−8.458−0.8776)A=\begin{pmatrix} -1.175&0.9871\\-8.458&-0.8776 \end{pmatrix}A=(−1.175−8.4580.9871−0.8776),B=(−0.194−0.03593−19.29−3.803)B=\begin{pmatrix} -0.194&-0.03593\\-19.29&-3.803 \end{pmatrix}B=(−0.194−19.29−0.03593−3.803),设R1=50I2R_1=50I_2R1=50I2,Q1=10I2Q_1=10I_2Q1=10I2。
利用Matlab中的 care求解Riccati方程P1A+AP1T+Q1−P1BR1−1BTP1=0P_1A+AP_1^T+Q_1-P_1BR_1^{-1}B^TP_1=\mathbf{0}P1A+AP1T+Q1−P1BR1−1BTP1=0得到:
P1=(6.1743−0.2904−0.29040.9991)=P1T>0P_1 = \begin{pmatrix} 6.1743&-0.2904\\-0.2904&0.9991 \end{pmatrix} =P_1^T>0 P1=(6.1743−0.2904−0.29040.9991)=P1T>0
代码如下:
>> A=[-1.175 0.9871;-8.458 -0.8776];
>> B = [-0.194 -0.03593;-19.29 -3.803];
>> R1 = 50*eye(2);
>> Q1 = 10*eye(2);
>> P1 = care(A,B,Q1,R1)P1 =6.1743 -0.2904-0.2904 0.9991
故由定理1.1多智能体系统可以实现一致性。
可以知道在验证线性系统一致性的过程中并没有考虑个体间的通信Laplacian矩阵。这说明同构多智能体线性系统的一致性本质上与其Laplacian矩阵无关!!!
可以得到其Laplacian矩阵为:
L=(1−10−12−10−11)L=\begin{pmatrix} 1&-1&0\\-1&2&-1\\0&-1&1 \end{pmatrix} L=1−10−12−10−11
其中矩阵K1=−R1−1BTP1=(−0.08810.3843−0.01770.0758)K_1=-R_1^{-1}B^TP_1=\begin{pmatrix} -0.0881 &0.3843\\-0.0177&0.0758\end{pmatrix}K1=−R1−1BTP1=(−0.0881−0.01770.38430.0758),ccc要满足c≥12mini=2,...Nλi(L)=0.5c\geq\frac{1}{2\min_{i=2,...N}{\lambda_i(L)}}=0.5c≥2mini=2,...Nλi(L)1=0.5,取c=0.6c=0.6c=0.6。得到控制策略:
u(t)=cK1ξ(t)=(I2⊗(−0.05290.2306−0.01060.0455))ξ(t)\mathbf{u}(t)=cK_1\mathbf{\xi}(t)=(I_2\otimes\begin{pmatrix} -0.0529 & 0.2306\\-0.0106 &0.0455\end{pmatrix})\mathbf{\xi}(t) u(t)=cK1ξ(t)=(I2⊗(−0.0529−0.01060.23060.0455))ξ(t)
下面用代码验证其可行性:
这里需要将连续系统零阶离散化,因此需要的采样时间很重要,不同采样时间会导致最后结果不收敛:
当Δt=0.04s\Delta t=0.04sΔt=0.04s时:

当Δt=0.06s\Delta t=0.06sΔt=0.06s时:

可以看到差距甚大,几乎不能用,因此说明了采样时间的重要性。同时也说明了该一致性控制策略有效!
3.代码
clc,clear;
A=[-1.175 0.9871;-8.458 -0.8776];
B = [-0.194 -0.03593;-19.29 -3.803];
c = 0.6;
K1 = [-0.0881 0.3843;...-0.0177 0.0758];
L = [1 -1 0;-1 2 -1;0 -1 1];
x1 = [10,-3]';x1_array = x1;
x2 = [-7,2]'; x2_array = x2;
x3 = [4,-1]'; x3_array = x3;
x_0 = [x1,x2,x3];
% 设置采样时间
delta_t = 0.04;
% num个时间步长内仿真
num = 100;
x = [x1;x2;x3];
%x_array = zeros(3*2,num);
for k = 1:num% 设计总的控制策略U = kron(L,c*K1*eye(2))*x;u1 = U(1:2);u2 = U(3:4);u3 = U(5:6);
for i = 1:3 x1 = (eye(2) +delta_t*A)*x1 + delta_t*B*u1; x2 = (eye(2) +delta_t*A)*x2 + delta_t*B*u2;x3 = (eye(2) +delta_t*A)*x3 + delta_t*B*u3;
end
x = [x1;x2;x3];
x1_array = [x1_array,x1];
x2_array = [x2_array,x2];
x3_array = [x3_array,x3];
end
% 下面开始画图
subplot(121)
hold on;grid on;box on;
plot(delta_t*(1:num),x1_array(1,1:num),'r.-');
plot(delta_t*(1:num),x2_array(1,1:num),'g.-');
plot(delta_t*(1:num),x3_array(1,1:num),'b.-');
xlabel('时间/s');ylabel('俯仰角');
legend('无人机1','无人机2','无人机3');
subplot(122)
hold on;grid on;box on;
plot(delta_t*(1:num),x1_array(2,1:num),'r.-');
plot(delta_t*(1:num),x2_array(2,1:num),'g.-');
plot(delta_t*(1:num),x3_array(2,1:num),'b.-');
xlabel('时间/s');ylabel('俯仰角速度');
legend('无人机1','无人机2','无人机3');
相关文章:
多智能体集群协同控制笔记(1):线性无领航多智能体系统的一致性
对于连续时间高阶线性多智能体系统的状态方程为: x˙i(t)Axi(t)Bui(t),i1,2..N\dot {\mathbf{x}}_i(t)A\mathbf{x}_i(t)B\mathbf{u}_i(t),i1,2..N x˙i(t)Axi(t)Bui(t),i1,2..N 下标iii代表第iii个智能体,ui(t)∈Rq1\mathbf{u}_i(t)\in R^{q \time…...
hadoop-Yarn资源调度器【尚硅谷】
大数据学习笔记 Yarn资源调度器 Yarn是一个资源调度平台,负责为运算程序提供服务器运算资源,相当于一个分布式的操作系统平台,而MapReduce等运算程序则相当于运行与操作系统之上的应用程序。 (也就是负责MapTask、ReduceTask等任…...

聊聊如何避免多个jar通过maven打包成一个jar,多个同名配置文件发生覆盖问题
前言 不知道大家在开发的过程中,有没有遇到这种场景,外部的项目想访问内部nexus私仓的jar,因为私仓不对外开放,导致外部的项目没法下载到私仓的jar,导致项目因缺少jar而无法运行。 通常遇到这种场景,常用…...

Flume 使用小案例
案例一:采集文件内容上传到HDFS 1)把Agent的配置保存到flume的conf目录下的 file-to-hdfs.conf 文件中 # Name the components on this agent a1.sources r1 a1.sinks k1 a1.channels c1 # Describe/configure the source a1.sources.r1.type spoo…...

DLO-SLAM代码阅读
文章目录DLO-SLAM点评代码解析OdomNode代码结构主函数 main激光回调函数 icpCB初始化 initializeDLO重力对齐 gravityAlign点云预处理 preprocessPoints关键帧指标 computeMetrics设定关键帧阈值setAdaptiveParams初始化目标数据 initializeInputTarget设置源数据 setInputSour…...
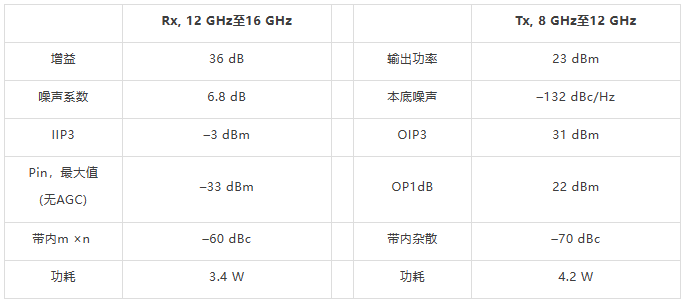
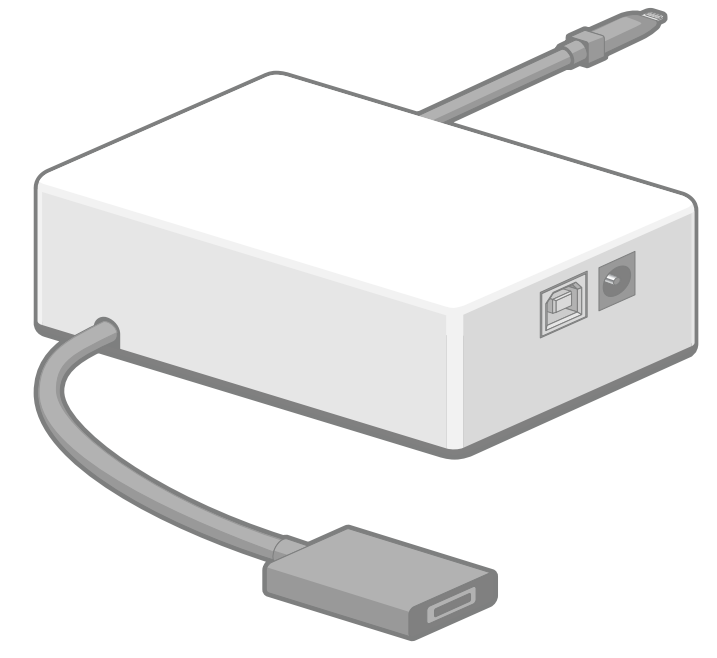
X和Ku波段小尺寸无线电设计
卫星通信、雷达和信号情报(SIGINT)领域的许多航空航天和防务电子系统早就要求使用一部分或全部X和Ku频段。随着这些应用转向更加便携的平台,如无人机(UAV)和手持式无线电等,开发在X和Ku波段工作,同时仍然保持极高性能水平的新型小尺寸、低功耗…...

推荐算法 - 汇总
本文主要对推荐算法整体知识点做汇总,做到总体的理解;深入理解需要再看专业的材料。推荐算法的意义推荐根据用户兴趣和行为特点,向用户推荐所需的信息或商品,帮助用户在海量信息中快速发现真正所需的商品,提高用户黏性…...
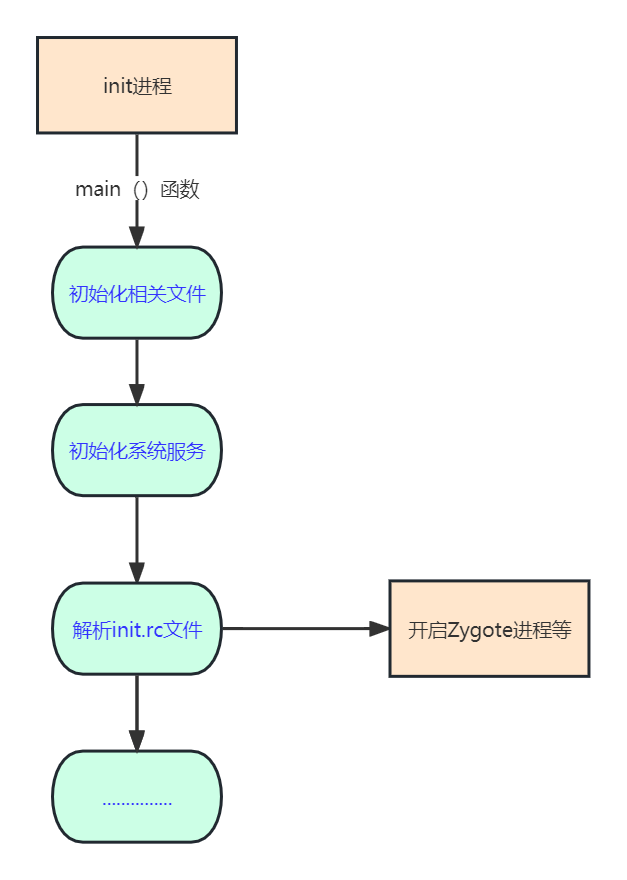
Android 系统的启动流程
前言:从开机的那一刻,到开机完成后launcher将所有应用进行图标展示的这个过程,大概会有哪一些操作?执行了哪些代码?作为Android开发工程师的我们,有必要好好的梳理一遍。既然要梳理Android系统的启动流程&a…...
自学5个月Java找到了9K的工作,我的方式值得大家借鉴 第二部分
我的学习心得,我认为能不能自学成功的要素有两点。 第一点就是自身的问题,虽然想要转行学习Java的人很多,但是非常强烈的想要转行学好的人是小部分。而大部分人只是抱着试试的心态来学习Java,这是完全不可能的。所以能不能学成Jav…...

Vue 3 第五章:reactive全家桶
文章目录1. reactive1.1. reactive函数创建一个响应式对象1.2. 修改reactive创建的响应式对象的属性2. readOnly2.1. 使用 readonly 函数创建一个只读的响应式对象2.2. 如何修改嵌套在只读响应式对象中的对象?3. shallowReactive3.1. 使用 shallowReactive 函数创建一个浅层响…...
【联机对战】微信小程序联机游戏开发流程详解
现有一个微信小程序叫中国象棋项目,棋盘类的单机游戏看着有缺少了什么,现在给补上了,加个联机对战的功能,增加了可玩性,对新手来说,实现联机游戏还是有难度的,那要怎么实现的呢,接下…...

优化基于axios接口管理的骚操作
优化基于axios接口管理的骚操作! 本文针对中大型的后台项目的接口模块优化,在不影响项目正常运行的前提下,增量更新。 强化功能 1.接口文件写法简化(接口模块半自动化生成) 2.任务调度、Loading调度(接口层…...
【Django功能开发】如何正确使用定时任务(启动、停止)
系列文章目录 【Django开发入门】ORM的增删改查和批量操作 【Django功能开发】编写自定义manage命令 文章目录系列文章目录前言一、django定时任务二、django-apscheduler基本使用1.安装django-apscheduler2.配置settings.py的INSTALLED_APPS3.通过命令生成定时记录表3.如何创…...

7个好用到爆的音频、配乐素材网站,BGM都在这里了
现在只要有一部手机,人人都能成为视频创作者。一个好的视频不能缺少的就是内容、配乐,越来越注重版权的当下,音效素材使用不当造成侵权的案例层出不穷。为了避免侵权,找素材让很多创作者很头疼。 今天我就整理了7个可以免费下载&…...
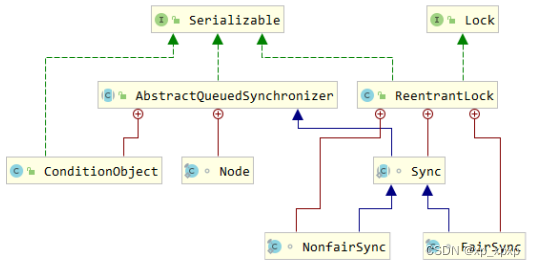
JUC(二)
1.可重入锁–ReentrantLock原理 1.1.非公平锁的实现原理 1.1.1.加锁解锁流程 1>.先从构造器开始看,默认为非公平锁,可以在构造函数中设置参数指定公平锁 public ReentrantLock() {sync = new NonfairSync(); }public ReentrantLock...
ATS认证教学
我用的版本是ATS7.11、系统版本是用最新的ios13.2.1 定义 ATS旨在分析通过UART、USB和蓝牙传输传输的iAP流量、通过USB和无线(蓝牙和Wi-Fi)传输的CarPlay流量、通过Wi-Fi传输的AirPlay 2流量以及闪电音频流量。 ATS是Apple’s Accessory Test System的…...
【操作系统】进程管理
进程与线程 1. 进程 进程是资源分配的基本单位 进程控制块 (Process Control Block, PCB) 描述进程的基本信息和运行状态,所谓的创建进程和撤销进程,都是指对 PCB 的操作。 下图显示了 4 个程序创建了 4 个进程,这 4 个进程可以并发地执行…...

一分钟掌握技术术语:API(接口)
很多产品经理在项目开发过程中经常听到:你调我这个接口就好了;这个功能你写个接口给我;有什么不懂的就看下API接口文档。 开发经常说的接口是什么意思呢?术语解释:API(Application Programming Interface&…...
RabbitMQ之交换机
交换机 在上一节中,我们创建了一个工作队列。我们假设的是工作队列背后,每个任务都恰好交付给一个消费者(工作进程)。在这一部分中,我们将做一些完全不同的事情-我们将消息传达给多个消费者。这种模式称为“发布/订阅”. 为了说明这种模式,我们将构建一个简单的日志系统。它…...
Tensorflow深度学习对遥感图像分类,内存不够怎么办?
问题描述在使用Tensorflow-cpu对图像分类的时候,在预读数据过程中,由于数据量过大,内存不足,导致计算失败。使用环境:win10系统 Pycharm tensorflow-cpu2.5.0 CPU: i7 8700 内存64G图1 CPU配置图图2 内存信息图使用数据…...

CentOS 7下‘Development Tools’和‘开发工具’组有区别吗?实测告诉你答案
CentOS 7下‘Development Tools’与‘开发工具’的隐藏关联:技术细节全解析在Linux系统管理中,yum的软件包组功能一直是个既实用又充满谜团的领域。特别是当系统语言环境与软件包元数据语言不一致时,开发者们常常会遇到一个有趣的现象&#x…...

AArch64内存管理:MAIR_EL3寄存器详解与应用
1. AArch64内存管理基础与MAIR_EL3寄存器定位 在Armv8-A/v9-A架构中,内存管理单元(MMU)通过多级页表实现虚拟地址到物理地址的转换。当处理器执行内存访问时,MMU会遍历页表条目(Translation Table Entry),其中包含两个关键信息:目…...
)
ROS Noetic实战:从bag包里‘抠’出雷达点云和IMU数据的保姆级教程(Ubuntu 20.04)
ROS Noetic实战:从bag包里提取雷达点云和IMU数据的完整指南(Ubuntu 20.04)在机器人开发中,ROS bag文件就像是一个装满珍贵数据的宝箱,而雷达点云和IMU数据则是其中最闪亮的宝石。作为一名长期与ROS打交道的开发者&…...

如何用Python脚本榨干百度网盘带宽:pan-baidu-download终极指南
如何用Python脚本榨干百度网盘带宽:pan-baidu-download终极指南 【免费下载链接】pan-baidu-download 百度网盘下载脚本 项目地址: https://gitcode.com/gh_mirrors/pa/pan-baidu-download 在数字时代,百度网盘已成为我们存储和分享大型文件的默认…...

INT8量化下TVA注意力对齐精度保障方案
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“…...

Codex使用API Key授权无法使用插件?
小伙伴们,大家好,我是小溪,见字如面。对于没有ChatGPT账号的小伙伴来说,虽然可以通过API Key授权的方式使用Codex桌面端,但是会有一些限制。比如无法使用插件功能,无法使用Codex移动端进行远程控制等。为了…...

3个步骤彻底解决WSA安装失败问题:从错误代码到完美运行
3个步骤彻底解决WSA安装失败问题:从错误代码到完美运行 【免费下载链接】WSABuilds Run Windows Subsystem For Android on your Windows 10 and Windows 11 PC using prebuilt binaries with Google Play Store (MindTheGapps) and/or Magisk or KernelSU (root so…...

通过TaotokenCLI工具一键配置开发环境接入参数
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过Taotoken CLI工具一键配置开发环境接入参数 对于需要接入多个大模型服务的开发者而言,手动配置每个项目的API密钥、…...

第2章 谁在危险中——被AI替代的五类程序员
第2章 谁在危险中——被AI替代的五类程序员 核心问题:哪些程序员最容易被AI替代?背后的原因是什么? 2.1 问题定义:一场正在发生的结构性塌陷 2.1.1 数据不会说谎 2026年1月12日,Ravio发布了一份让整个科技圈沉默的报告:过去一年,初级开发者岗位招聘量暴跌73%。 不是…...

3大突破性功能:用HiveWE革新你的魔兽争霸III地图创作体验
3大突破性功能:用HiveWE革新你的魔兽争霸III地图创作体验 【免费下载链接】HiveWE A Warcraft III world editor. 项目地址: https://gitcode.com/gh_mirrors/hi/HiveWE 还在为传统魔兽争霸III编辑器缓慢的加载速度和复杂的操作界面而烦恼吗?Hive…...