【opencv】计算机视觉:实时目标追踪
目录
前言
解析
深入探究
前言
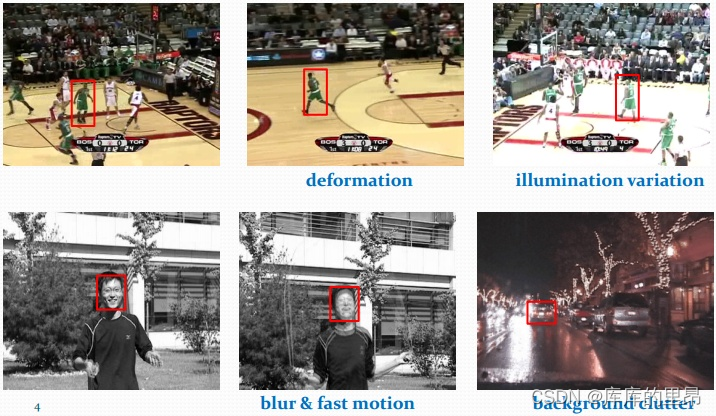
目标追踪技术对于民生、社会的发展以及国家军事能力的壮大都具有重要的意义。它不仅仅可以应用到体育赛事当中目标的捕捉,还可以应用到交通上,比如实时监测车辆是否超速等!对于国家的军事也具有一定的意义,比如说导弹识别目标等方向。所以说实时目标追踪技术对于整个社会来说都是非常重要的!目前被应用的比较多的,而且效果较好的是YOLO系列,目前已经更新到了YOLO7。原作者更新到了YOLO3之后就不再更新YOLO这个系列了,因为被一些不法人员应用到了军事上,给民众要造成了一定的伤害!但是依旧没有阻挡住YOLO的发展。但是我们提出来的这个是基于计算机视觉的,那么为什么有了YOLO这么好的东西我们还要基于计算机视觉来做呢?因为YOLO训练的模型占用的内存一般不小,这就会影响了一些东西的使用,比如说摄像头!就没有办法有这么大的内存来存储,所以还需要一些不需要那么大内存的东西来去实时跟踪目标!

解析
首先我们来根据代码来讲解一下如何追踪实时物体!
首先我们导入库和配置参数,对于参数的配置。我们需要在参数框架上输入--video videos/nascar.mp4 --tracker kcf。表示的意思就是我们导入的视频是nascar.mp4,然后用kcf这个框架来干活。
import argparse
import time
import cv2
import numpy as np# 配置参数
ap = argparse.ArgumentParser()
ap.add_argument("-v", "--video", type=str,help="path to input video file")
ap.add_argument("-t", "--tracker", type=str, default="kcf",help="OpenCV object tracker type")
args = vars(ap.parse_args())
然后我们写一些OpenCV已经有的算法。
OPENCV_OBJECT_TRACKERS = {"csrt": cv2.legacy.TrackerCSRT_create,"kcf": cv2.legacy.TrackerKCF_create,"boosting": cv2.legacy.TrackerBoosting_create,"mil": cv2.legacy.TrackerMIL_create,"tld": cv2.legacy.TrackerTLD_create,"medianflow": cv2.legacy.TrackerMedianFlow_create,"mosse": cv2.legacy.TrackerMOSSE_create
}
这里注意一定要按照这个来写。其他的由于版本问题,可能会有问题。对于新老版本是不一样的。
然后我们建立多个追踪器。并且开始读入视频数据。这里的trackers就是我们需要建立的多目标追踪器。
trackers = cv2.legacy.MultiTracker_create()
vs = cv2.VideoCapture(args["video"])
这里我们取出来视频中的每一帧,然后视频结束了就直接结束。对于每一帧我们都要做一个操作就是同比例处理图像。
while True:# 取当前帧frame = vs.read()# (true, data)frame = frame[1]if frame is None:break# resize每一帧(h, w) = frame.shape[:2]width=600r = width / float(w)dim = (width, int(h * r))frame = cv2.resize(frame, dim, interpolation=cv2.INTER_AREA)
对于追踪结果来说,我们需要每一帧每一帧的进行更新框框。因为物体在运动,所以我们也要更新框框。
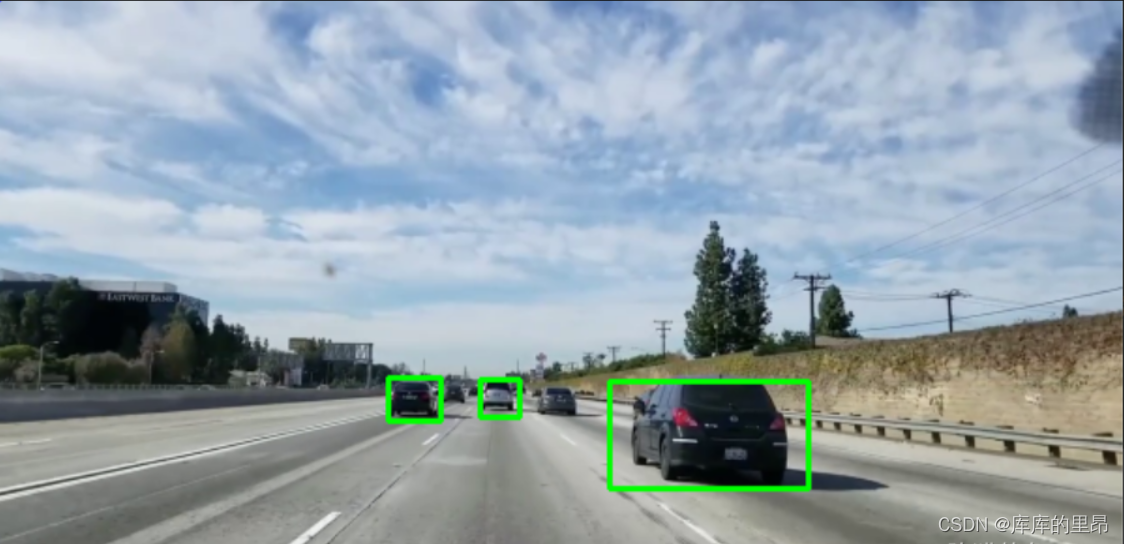
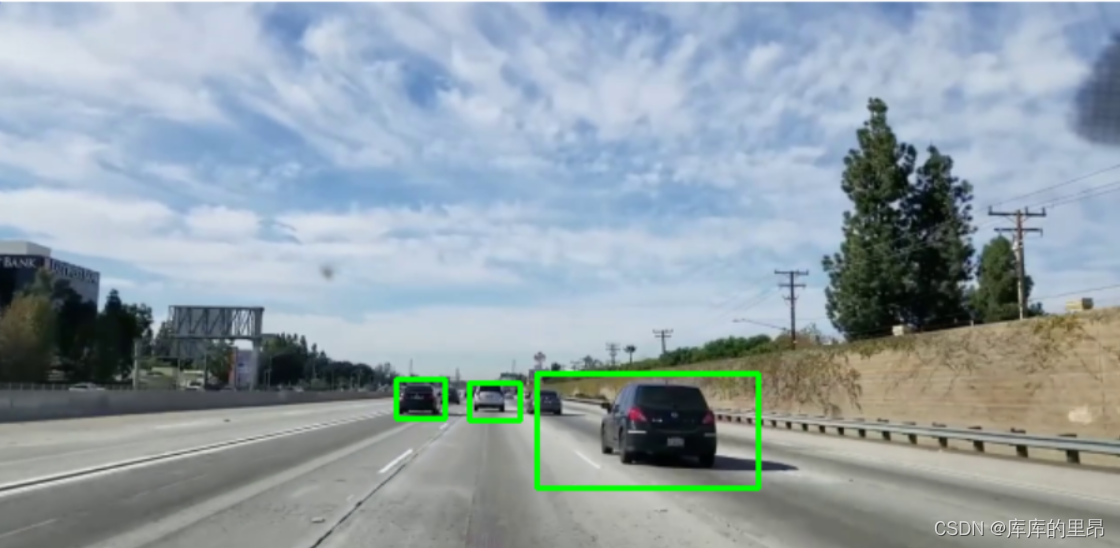
(success, boxes) = trackers.update(frame) for box in boxes:(x, y, w, h) = [int(v) for v in box]cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
对于每一个框框我们在更新的时候我们都要绘制出来!
cv2.imshow("Frame", frame)key = cv2.waitKey(100) & 0xFF然后将框框展示出来。cv2.waitKey(100)这个部分100可以改成其他的这里可以调节视频的快慢。
if key == ord("s"):# 选择一个区域,按sbox = cv2.selectROI("Frame", frame, fromCenter=False,showCrosshair=True)
如果我们按下S键,然后我们就可以手动的框出来ROI区域了。

tracker = OPENCV_OBJECT_TRACKERS[args["tracker"]]()#创建一个追踪器 添加追踪器trackers.add(tracker, frame, box)
这里创建出来追踪器,然后添加上。
elif key == 27:break
vs.release()
cv2.destroyAllWindows()
最后退出。

可以手动的任意追踪目标!!!完美!!!
追踪效果总体来说还是不错的!
深入探究
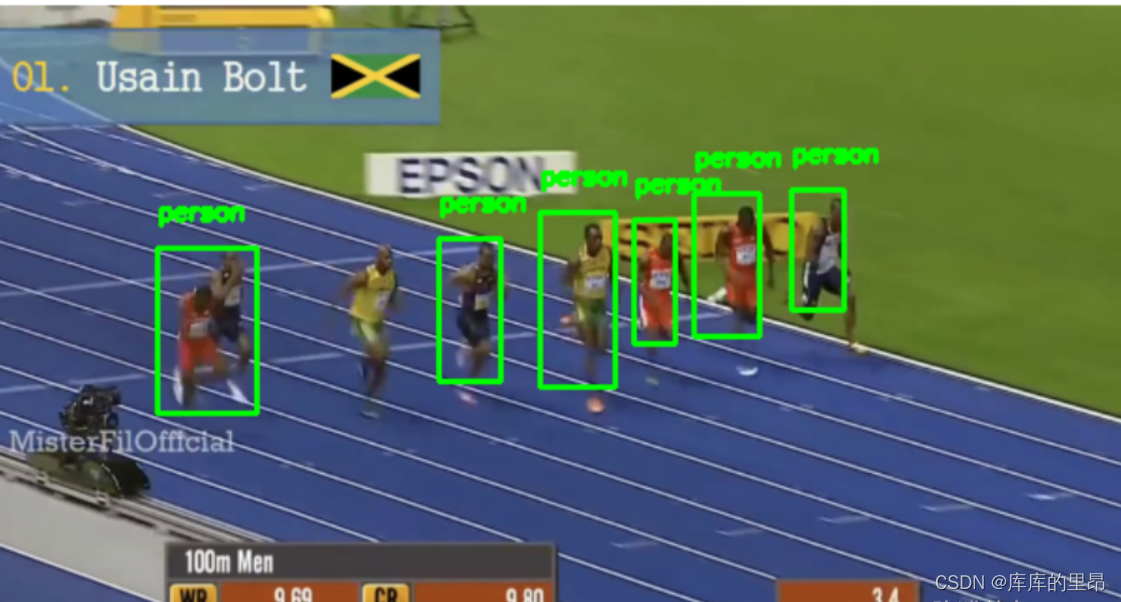
然后又继续做了一个多目标自动识别目标追踪。这里我们以运动员短跑为案例继续来讲解。
这里面我们导入库和第三方参数。
from utils import FPS
import numpy as np
import argparse
import dlib
import cv2ap = argparse.ArgumentParser()
ap.add_argument("-p", "--prototxt", required=True,help="path to Caffe 'deploy' prototxt file")
ap.add_argument("-m", "--model", required=True,help="path to Caffe pre-trained model")
ap.add_argument("-v", "--video", required=True,help="path to input video file")
ap.add_argument("-o", "--output", type=str,help="path to optional output video file")
ap.add_argument("-c", "--confidence", type=float, default=0.2,help="minimum probability to filter weak detections")
args = vars(ap.parse_args())
其中参数导入的话是这样:
--prototxt mobilenet_ssd/MobileNetSSD_deploy.prototxt --model mobilenet_ssd/MobileNetSSD_deploy.caffemodel --video race.mp4
--model mobilenet_ssd/MobileNetSSD_deploy.caffemodel
--video race.mp4
把这段代码直接复制粘贴到参数配置当中就好。
然后我们建立一些分类标签,看看计算机到时候框出来的很多很多框框都属于什么东西,然后我们进行过滤操作。
CLASSES = ["background", "aeroplane", "bicycle", "bird", "boat","bottle", "bus", "car", "cat", "chair", "cow", "diningtable","dog", "horse", "motorbike", "person", "pottedplant", "sheep","sofa", "train", "tvmonitor"]
读取网络模型。
print("[INFO] loading model...")
net = cv2.dnn.readNetFromCaffe(args["prototxt"], args["model"])
其中cv2.dnn.readNetFromCaffe(prototxt, model) 用于进行SSD网络的caffe框架的加载
参数说明:prototxt表示caffe网络的结构文本,model表示已经训练好的参数结果把视频读入进来。
print("[INFO] starting video stream...")
vs = cv2.VideoCapture(args["video"])
writer = None
trackers = []
labels = []
fps = FPS().start()
这里我们设置两个列表,等会来添加追踪器和标签信息。并且计算一下视频的fps数值。fps也就是一秒钟计算机可以处理多少帧图像。
while True:# 读取一帧(grabbed, frame) = vs.read()# 是否是最后了if frame is None:break# 预处理操作(h, w) = frame.shape[:2]width=600r = width / float(w)dim = (width, int(h * r))frame = cv2.resize(frame, dim, interpolation=cv2.INTER_AREA)rgb = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
在这里面和上面一样同样也要同比例放大或者缩小每一帧图像。然后有一个重要操作,就是一定要将BGR图像通道改成RGB通道顺序。
if args["output"] is not None and writer is None:fourcc = cv2.VideoWriter_fourcc(*"MJPG")writer = cv2.VideoWriter(args["output"], fourcc, 30,(frame.shape[1], frame.shape[0]), True)
这里是保存数据,如果output这个文件夹是空的并且writer也是空的,那么我们将实时视频保存下来。这个就涉及到了视频保存的代码,有需要的可以自行提取。
if len(trackers) == 0:# 获取blob数据(h, w) = frame.shape[:2]blob = cv2.dnn.blobFromImage(frame, 0.007843, (w, h), 127.5)
cv2.dnn.blobFromImage主要是对图像进行一个预处理,其中0.007843表示各通道数值的缩放比例。127.5表示各个通道减去的均值。
net.setInput(blob)detections = net.forward()
这里面把预处理的图像输入到了模型的输入当中,然后进行了一次前向传播。这里面我们就得到了很多的检测框框了。
for i in np.arange(0, detections.shape[2]):# 能检测到多个结果,只保留概率高的confidence = detections[0, 0, i, 2]# 过滤if confidence > args["confidence"]:# extract the index of the class label from the# detections listidx = int(detections[0, 0, i, 1])label = CLASSES[idx]# 只保留人的if CLASSES[idx] != "person":continue这里面在前向传播当中,我们得到一些概率值较大的,这里怎么定义较大呢,用args["confidence"]这个数值来定义,如果大于我们设定的概率数值,我们就把他的索引拿出来,然后取出来对应的标签,如果不是人的话我们就过滤除去,最后留下这一帧图像当中所有检测到的人。
box = detections[0, 0, i, 3:7] * np.array([w, h, w, h])(startX, startY, endX, endY) = box.astype("int")
这里面就是我们要得到这个框框,然后拿到这个框框的左上角和右下角坐标。
t = dlib.correlation_tracker()rect = dlib.rectangle(int(startX), int(startY), int(endX), int(endY))t.start_track(rgb, rect)
然后我们创建一个追踪器,然后得到检测到的框框,然后开始追踪,追踪的时候按照rgb,并且在第一帧图像的时候开始追踪。
labels.append(label)
trackers.append(t)然后添加人的标签,并且添加多个追踪器,因为不仅仅一个目标。
cv2.rectangle(frame, (startX, startY), (endX, endY),(0, 255, 0), 2)
cv2.putText(frame, label, (startX, startY - 15),cv2.FONT_HERSHEY_SIMPLEX, 0.45, (0, 255, 0), 2)
然后我们把框画出来,并且把标签贴上去。都是人的标签。
else:for (t, l) in zip(trackers, labels):t.update(rgb)#更新追踪器pos = t.get_position()#获得位置# 得到位置startX = int(pos.left())startY = int(pos.top())endX = int(pos.right())endY = int(pos.bottom())
如果检测到框框了,那么就我们遍历一下追踪器和标签,然后更新追踪器,并且获得追踪器的位置。并且得到位置。
if writer is not None:writer.write(frame)# 显示cv2.imshow("Frame", frame)key = cv2.waitKey(1) & 0xFF# 退出if key == 27:break# 计算FPSfps.update()fps.stop()
print("[INFO] elapsed time: {:.2f}".format(fps.elapsed()))
print("[INFO] approx. FPS: {:.2f}".format(fps.fps()))if writer is not None:writer.release()cv2.destroyAllWindows()
vs.release()
后面这些就是一些退出的一些简单的操作了。

FPS就是表示一秒钟可以处理17帧图片。运行时间是大概有20秒。然后我们想法就是继续进行一下改进,让处理的快一些。那么我们想到的就是使用多线程进行操作。多线程是指从软件或者硬件上实现多个线程并发执行的技术。
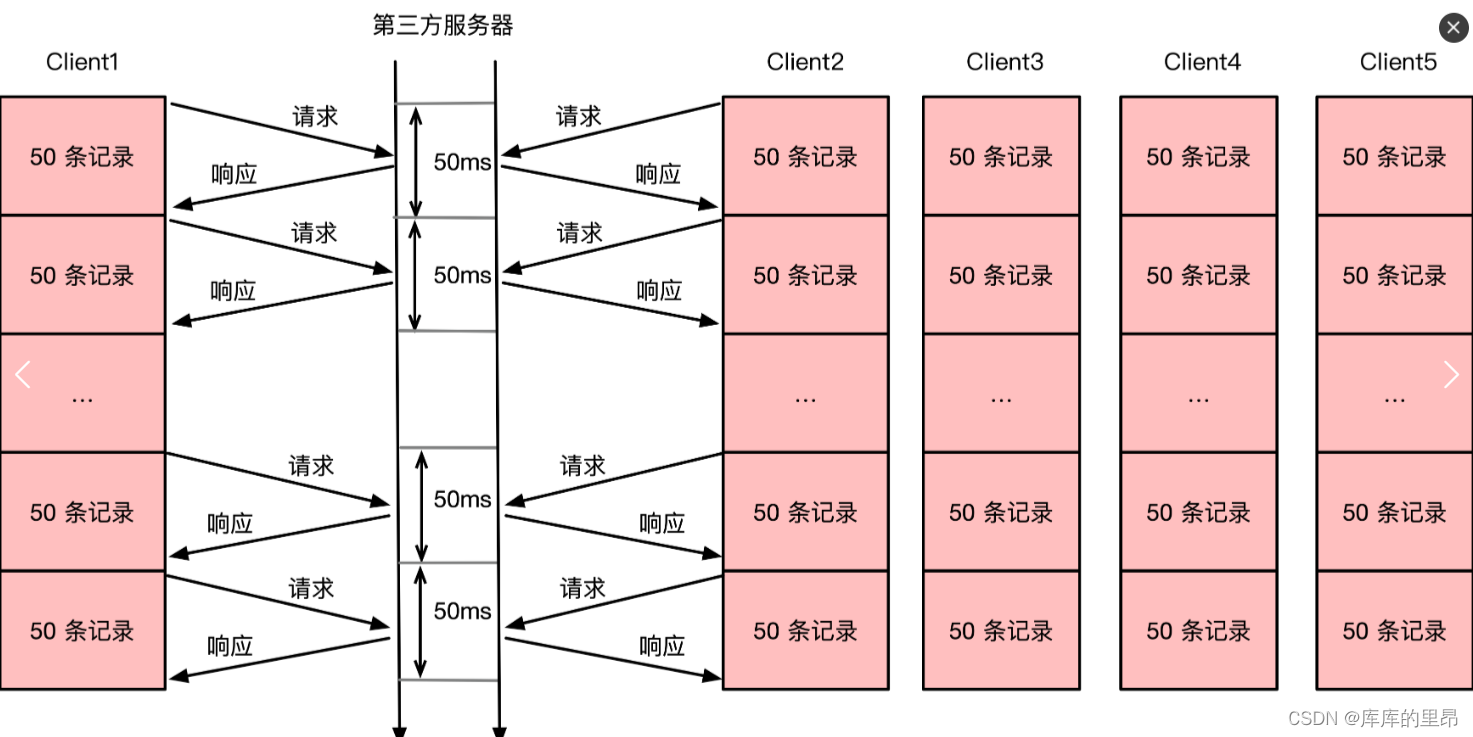
然后我们使用多线程进行改进程序:这里主函数就是要加上多线程。
if __name__ == '__main__':while True:(grabbed, frame) = vs.read()if frame is None:break(h, w) = frame.shape[:2]width=600r = width / float(w)dim = (width, int(h * r))frame = cv2.resize(frame, dim, interpolation=cv2.INTER_AREA)rgb = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)#深度学习必要要处理的部分if args["output"] is not None and writer is None:fourcc = cv2.VideoWriter_fourcc(*"MJPG")writer = cv2.VideoWriter(args["output"], fourcc, 30,(frame.shape[1], frame.shape[0]), True)#首先检测位置if len(inputQueues) == 0:(h, w) = frame.shape[:2]blob = cv2.dnn.blobFromImage(frame, 0.007843, (w, h), 127.5)#图像的预处理操作 详情看笔记net.setInput(blob)detections = net.forward()#输出追踪 因为是多个 所以我们下方要进行过滤for i in np.arange(0, detections.shape[2]): #检测了多少个模型confidence = detections[0, 0, i, 2]#置信度 这里我们可以理解为每一个模型对应CLASS的概率 然后选出来一个最高的if confidence > args["confidence"]:idx = int(detections[0, 0, i, 1])#表示CLASS的类别序号label = CLASSES[idx]#选出来if CLASSES[idx] != "person":#过滤掉除了人以外所有的追踪目标continuebox = detections[0, 0, i, 3:7] * np.array([w, h, w, h])#这里标记处框架 这里表示按照长宽背书来定义(startX, startY, endX, endY) = box.astype("int")bb = (startX, startY, endX, endY)# 创建输入q和输出qiq = multiprocessing.Queue()#定义多进程oq = multiprocessing.Queue()inputQueues.append(iq)outputQueues.append(oq)# 多核p = multiprocessing.Process(#八所有追踪器放进进程当中,本电脑为8核 12核会更快target=start_tracker,args=(bb, label, rgb, iq, oq))p.daemon = Truep.start()cv2.rectangle(frame, (startX, startY), (endX, endY),(0, 255, 0), 2)cv2.putText(frame, label, (startX, startY - 15),cv2.FONT_HERSHEY_SIMPLEX, 0.45, (0, 255, 0), 2)else:# 多个追踪器处理的都是相同输入for iq in inputQueues:iq.put(rgb)for oq in outputQueues:# 得到更新结果(label, (startX, startY, endX, endY)) = oq.get()# 绘图cv2.rectangle(frame, (startX, startY), (endX, endY),(0, 255, 0), 2)cv2.putText(frame, label, (startX, startY - 15),cv2.FONT_HERSHEY_SIMPLEX, 0.45, (0, 255, 0), 2)if writer is not None:writer.write(frame)cv2.imshow("Frame", frame)key = cv2.waitKey(1) & 0xFFif key == 27:breakfps.update()fps.stop()print("[INFO] elapsed time: {:.2f}".format(fps.elapsed()))print("[INFO] approx. FPS: {:.2f}".format(fps.fps()))if writer is not None:writer.release()cv2.destroyAllWindows()vs.release()

这里就是5个线程一起跑。一秒钟可以处理24帧图像,运行时间14秒。大大的改进整体的进程。

如果觉得博主的文章还不错或者您用得到的话,可以免费的关注一下博主,如果三连收藏支持就更好啦!这就是给予我最大的支持!
相关文章:
【opencv】计算机视觉:实时目标追踪
目录 前言 解析 深入探究 前言 目标追踪技术对于民生、社会的发展以及国家军事能力的壮大都具有重要的意义。它不仅仅可以应用到体育赛事当中目标的捕捉,还可以应用到交通上,比如实时监测车辆是否超速等!对于国家的军事也具有一定的意义&a…...
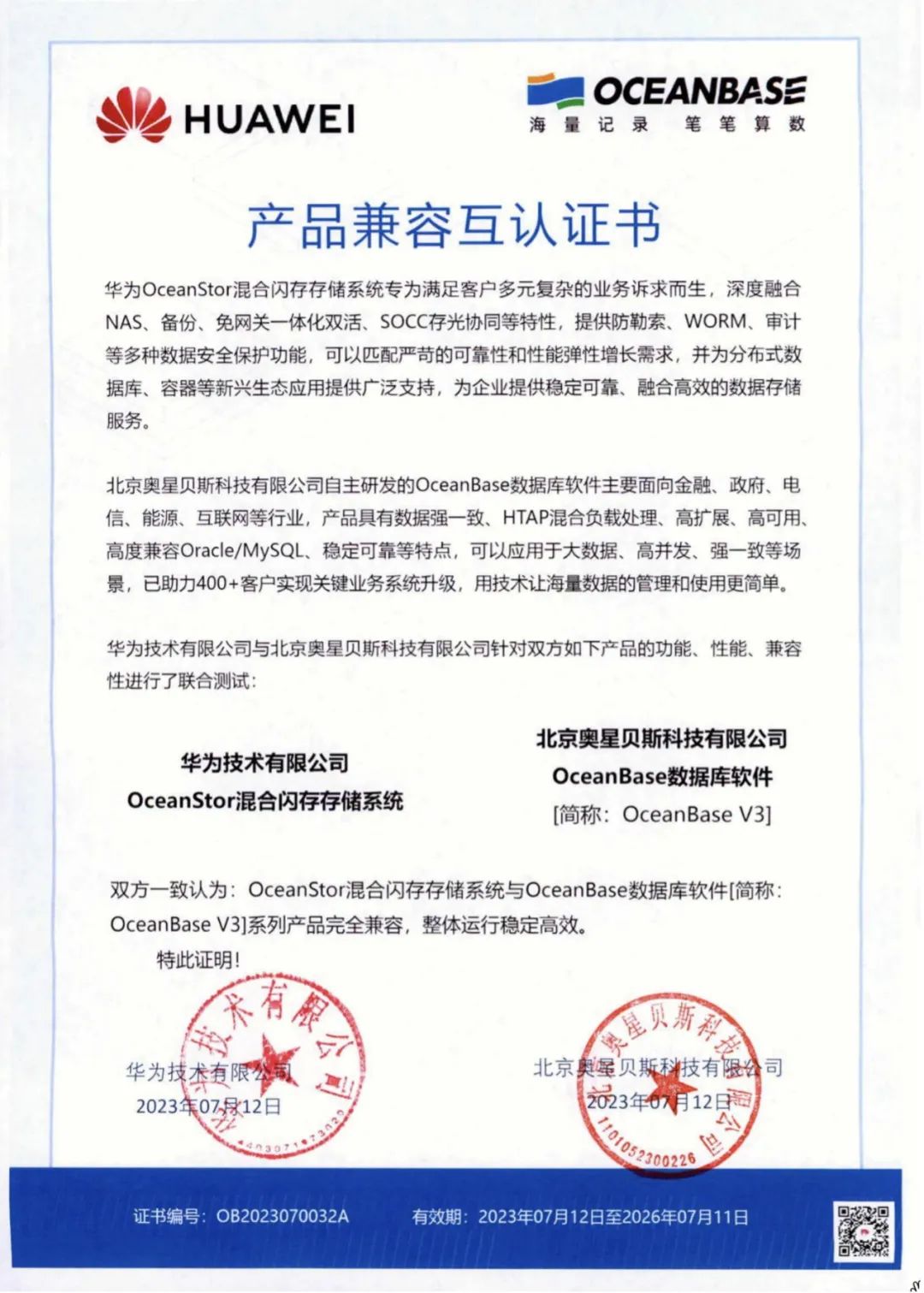
生态对对碰|华为OceanStor闪存存储与OceanBase完成兼容性互认证!
近日,北京奥星贝斯科技有限公司 OceanBase 数据库与华为技术有限公司 OceanStor Dorado 全闪存存储系统、OceanStor 混合闪存存储系统完成兼容性互认证。 OceanBase 数据库挂载 OceanStor 闪存存储做为数据盘和日志盘,在 OceanStor 闪存存储系统卓越性能…...

微服务负载均衡器Ribbon
1.什么是Ribbon 目前主流的负载方案分为以下两种: 集中式负载均衡,在消费者和服务提供方中间使用独立的代理方式进行负载,有硬件的(比如 F5),也有软件的(比如 Nginx)。 客户端根据…...
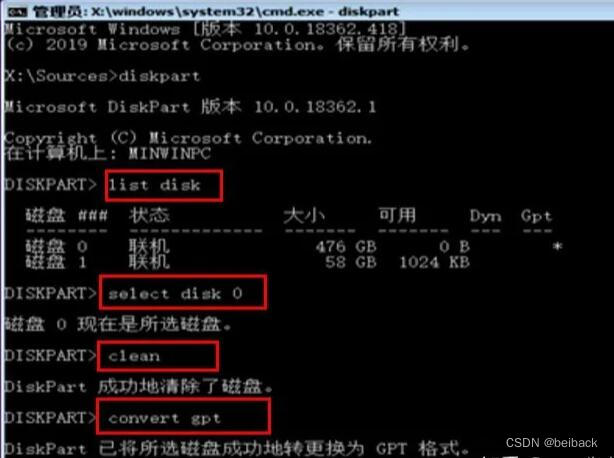
win10戴尔电脑安装操作系统遇到的问题MBR分区表只能安装GPT磁盘
首先按F2启动boot管理界面 调整启动盘的启动顺序,这里启动U盘为第一顺序。 第一步 选择安装程序的磁盘 第二步 转换磁盘为GPT磁盘 一般出现 磁盘0和1,说明存在两个盘 ,这里两个盘不是说的是C盘和D盘的问题,而是在物理上实际存在…...

阿里云服务器(vgn7i-vws) anaconda(py39)+pytorch1.12.0(cu113)
用xshell连接ip地址,端口号22,输入用户密码 安装anaconda 2022 10 py3.9 wget https://repo.anaconda.com/archive/Anaconda3-2022.10-Linux-x86_64.sh sha256sum Anaconda3-2022.10-Linux-x86_64.sh #校验数据完整性 chmod ux Anaconda3-2022.10-…...

使用 STM32F7 和 TensorFlow Lite 开发低功耗人脸识别设备
本文旨在介绍如何使用 STM32F7 和 TensorFlow Lite框架开发低功耗的人脸识别设备。首先,我们将简要介绍 STM32F7 的特点和能力。接下来,我们将讨论如何使用 TensorFlow Lite 在 STM32F7 上实现人脸识别算法。然后,我们将重点关注如何优化系统…...
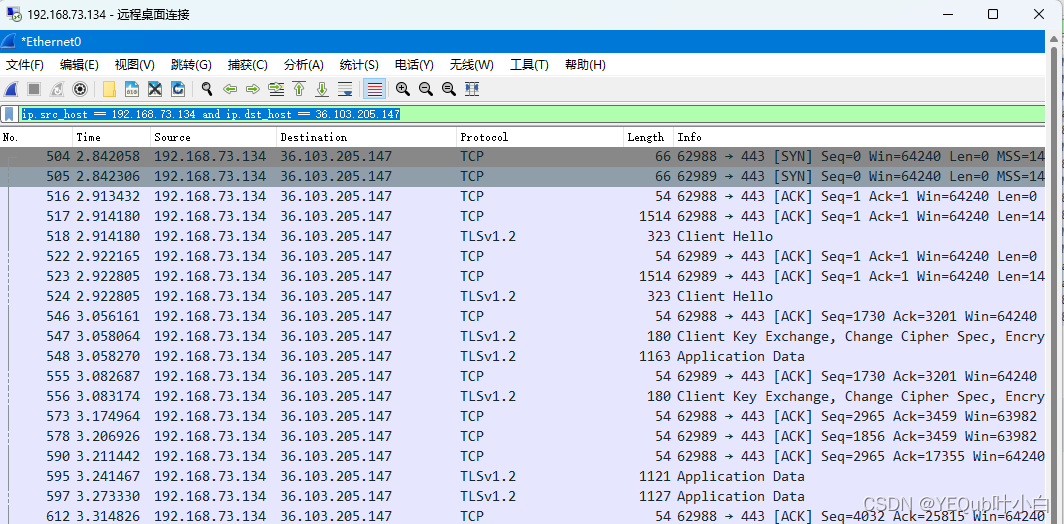
【wireshark】基础学习
TOC 查询tcp tcp 查询tcp握手请求的代码 tcp.flags.ack 0 确定tcp握手成功的代码 tcp.flags.ack 1 确定tcp连接请求的代码 tcp.flags.ack 0 and tcp.flags.syn 1 3次握手后确定发送成功的查询 tcp.flags.fin 1 查询某IP对外发送的数据 ip.src_host 192.168.73.134 查询某…...

使用Java连接Hbase
我在网上试 了很多代码,但是大部分都不能实现,Java连接Hbase,一直报一个错 java.util.concurrent.ExecutionException: org.apache.zookeeper.KeeperException$NoNodeException: KeeperErrorCode NoNode for /hbase/hbaseid一直也不清楚为什…...
OCR是什么意思,有哪些好用的OCR识别软件?
1. 什么是OCR? OCR(Optical Character Recognition)是一种光学字符识别技术,它可以将印刷体文字转换为可编辑的电子文本。OCR技术通过扫描和分析图像中的文字,并将其转化为计算机可识别的文本格式,从而…...
Springmvc实现增删改差
一、包结构 二、各层代码 (1)数据User public class User {private Integer id;private String userName;private String note;public User() {super();}public User(Integer i, String userName, String note) {super();this.id i;this.userName userName;this.note note;…...
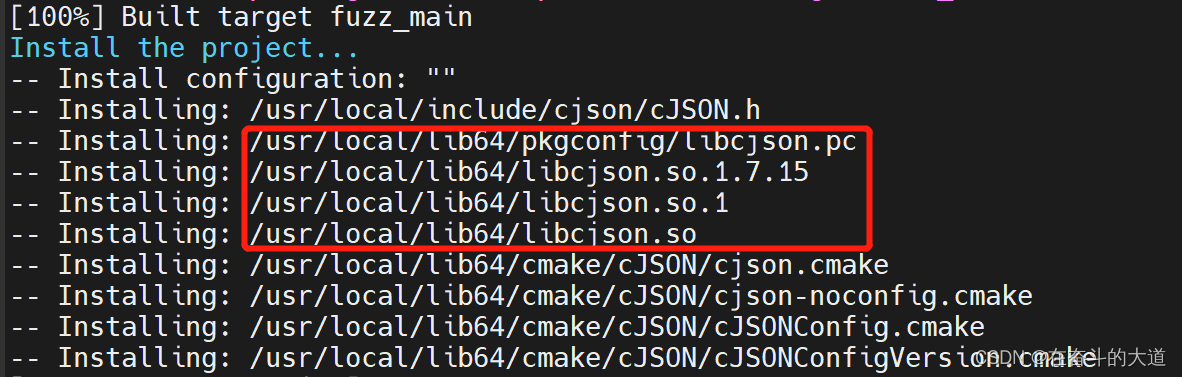
CentOS 7 使用cJSON 库
什么是JSON JSON是一种轻量级的数据交换格式,可读性强、编写简单。键值对组合编写规则,键名使用双引号包裹,冒号:分隔符后面紧跟着数值,有两种常用的数据类型是对象和数组。 对象:使用花括号{}包裹起来的…...

Linux——使用kill结束进程并恢复进程
目录 查看进程结束进程修复进程 查看进程 在linux中,关闭某进程之前先查看已经在运行的进程有哪些,使用下面命令查看: ps aux | grep -i apt 命令查看哪个进程正在使用 apt结束进程 结束某线程的命令为: sudo kill -9 PID 命令…...

【Linux虚拟内存的配置】
设置Linux虚拟内存 注意:在做项目时,电脑内存不够用,怎么办? 这里给大家提供了一种解决方案,用磁盘换内存,具体如下: 虚拟内存swap介绍 如果你的服务器的总是报告内存不足,并且时常因为内存不足而引发服务被强制kill的话,在不增加物理内…...
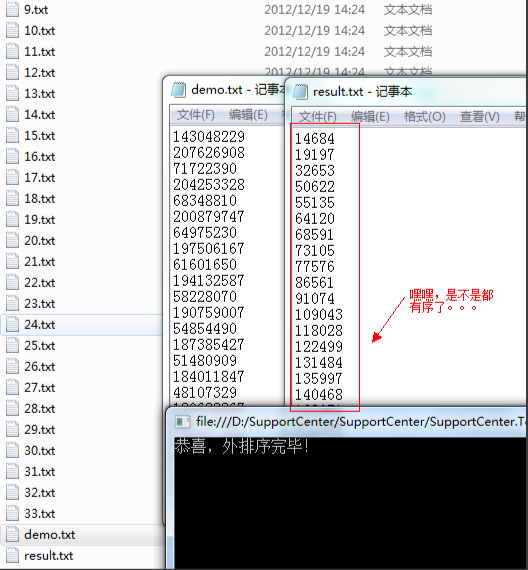
基于C#实现外排序
一、N 路归并排序 1.1、概序 我们知道算法中有一种叫做分治思想,一个大问题我们可以采取分而治之,各个突破,当子问题解决了,大问题也就 KO 了,还有一点我们知道内排序的归并排序是采用二路归并的,因为分治…...

HTML CSS登录网页设计
一、效果图: 二、HTML代码: <!DOCTYPE html> <!-- 定义HTML5文档 --> <html lang="en"> …...

dos 命令 判断路径中包含某字符并移动文件
SET GenFolder C:\Users\administered\Desktop\t2\old_file set path1C:\Users\administered\Desktop\t1\crontab_master set path2C:\Users\administered\Desktop\t2\old_file if not exist %GenFolder% ( echo %GenFolder%目录不存在,已创建该目录&#x…...
electron+vue3全家桶+vite项目搭建【26】electron本地安装Vue Devtool插件,安装浏览器扩展
文章目录 引入获取vue devtool导入插件排除插件的npm脚本最终效果 引入 demo项目地址 Vue Devtools插件是vue项目必备插件,它是安装在浏览器里的,而咱们的electron中实际就包含了一个浏览器,同理它也可以加载浏览器插件 获取vue devtool 直…...
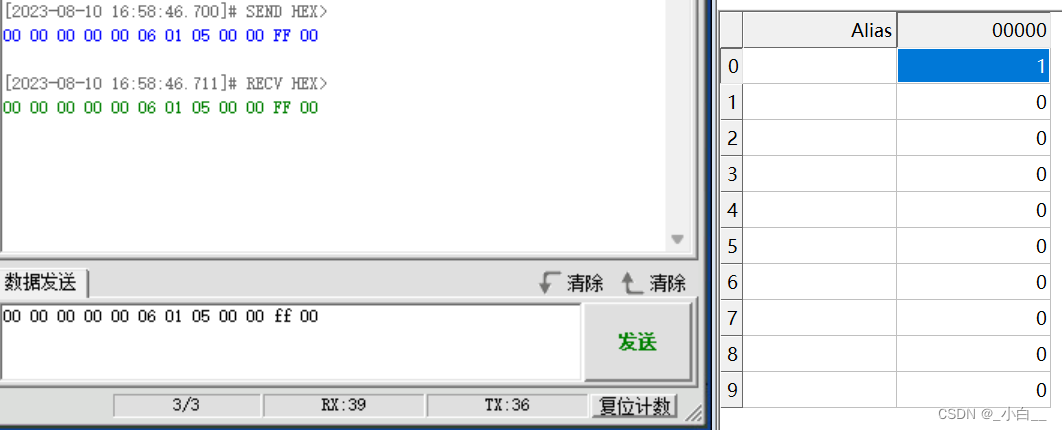
Modbus TCP
Modbus (👆 百度百科,放心跳转) 起源 Modbus 由 Modicon 公司于 1979 年开发,是一种工业现场总线协议标准。 Modbus 通信协议具有多个变种,支持串口,以太网多个版本,其中最著名的…...

基于人工兔算法优化概率神经网络PNN的分类预测 - 附代码
基于人工兔算法优化概率神经网络PNN的分类预测 - 附代码 文章目录 基于人工兔算法优化概率神经网络PNN的分类预测 - 附代码1.PNN网络概述2.变压器故障诊街系统相关背景2.1 模型建立 3.基于人工兔优化的PNN网络5.测试结果6.参考文献7.Matlab代码 摘要:针对PNN神经网络…...
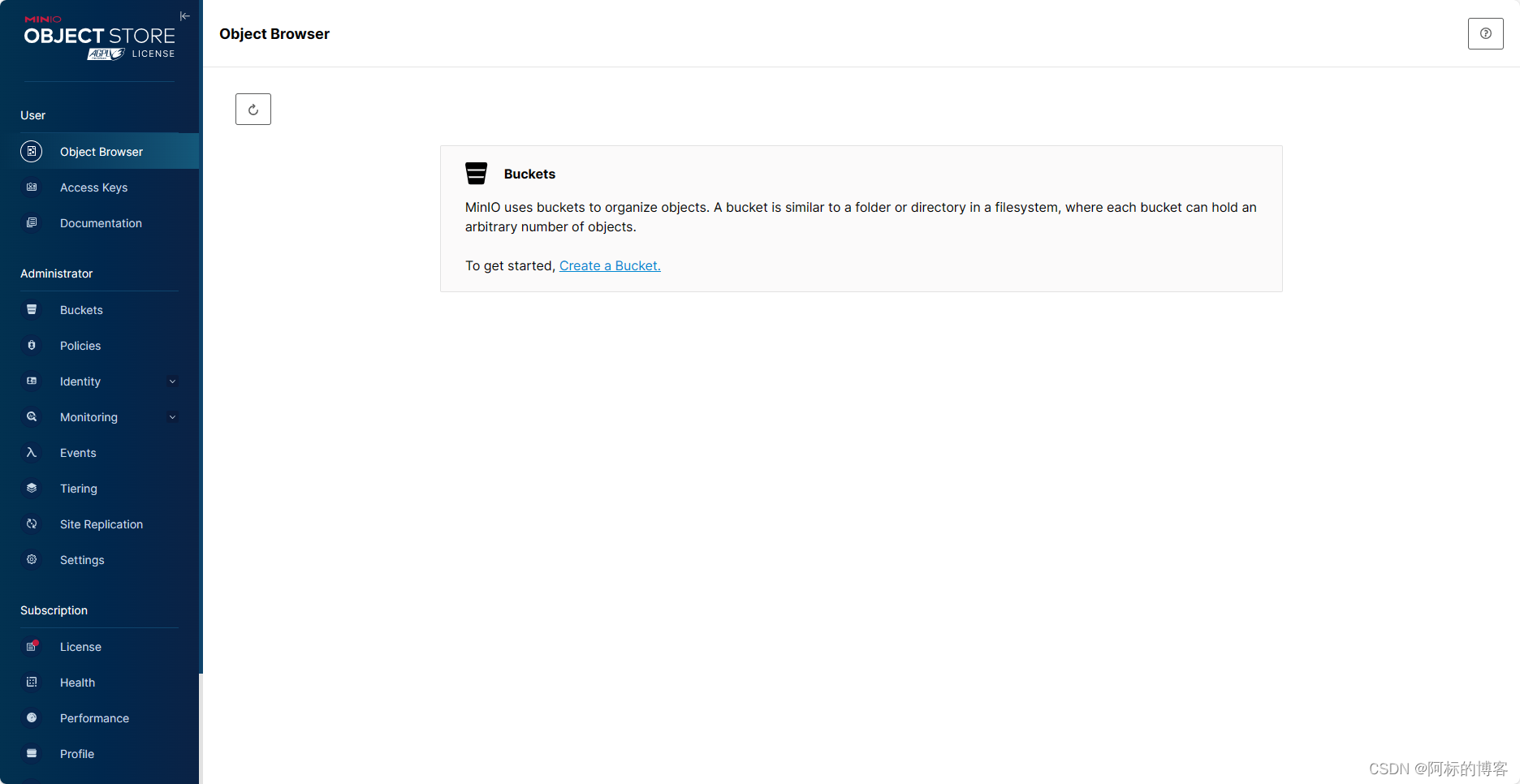
微服务学习(十二):安装Minio
微服务学习(十二):安装Minio 一、简介 MinIO 是一款基于Go语言发开的高性能、分布式的对象存储系统。客户端支持Java,Net,Python,Javacript, Golang语言。MinIO系统,非常适合于存储大容量非结构化的数据,例如图片、视…...

《重构:改善既有代码的设计》——以Java之名,重拾代码之美
这不是一本读一遍就够的书,这是一本值得放在手边反复翻阅的编程之道。引子:一本改变了无数程序员的书1999年,Martin Fowler的《Refactoring: Improving the Design of Existing Code》首次面世,在软件开发领域投下了一颗重磅炸弹。…...

3步快速掌握抖音批量下载助手:新手完全指南
3步快速掌握抖音批量下载助手:新手完全指南 【免费下载链接】douyinhelper 抖音批量下载助手 项目地址: https://gitcode.com/gh_mirrors/do/douyinhelper 还在为手动保存抖音视频而烦恼吗?面对心仪创作者的海量内容,一个个点击下载不…...

Navicat无限试用重置脚本:macOS数据库管理工具的智能生命周期管理方案
Navicat无限试用重置脚本:macOS数据库管理工具的智能生命周期管理方案 【免费下载链接】navicat_reset_mac navicat mac版无限重置试用期脚本 Navicat Mac Version Unlimited Trial Reset Script 项目地址: https://gitcode.com/gh_mirrors/na/navicat_reset_mac …...

别再只用plot了!Matlab双对数图loglog函数保姆级教程,从入门到精通
Matlab双对数图loglog函数:从科研到工程的深度可视化指南 在数据可视化领域,我们常常遇到跨越多个数量级的数值——从微弱的生物电信号(微伏级别)到地震波能量(兆焦耳级别),从纳米材料的微观特性…...

Windows Cleaner终极指南:3步解决C盘空间不足难题
Windows Cleaner终极指南:3步解决C盘空间不足难题 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 你是否曾经打开电脑,发现C盘已经红得发亮…...

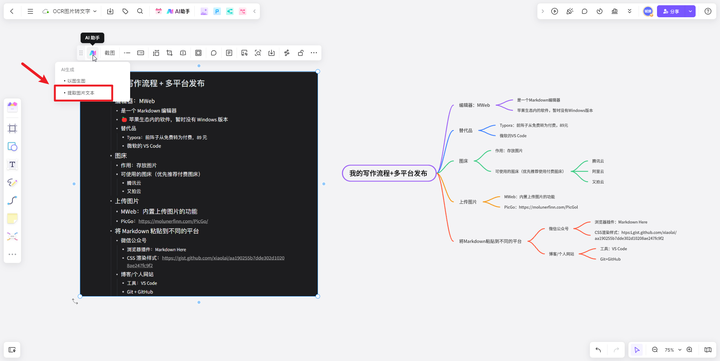
3分钟掌握免费开源神器:B站视频转文字一键搞定
3分钟掌握免费开源神器:B站视频转文字一键搞定 【免费下载链接】bili2text Bilibili视频转文字,一步到位,输入链接即可使用 项目地址: https://gitcode.com/gh_mirrors/bi/bili2text 还在为手动整理B站视频笔记而烦恼吗?想…...

8大网盘直链获取终极指南:告别限速,免费加速下载
8大网盘直链获取终极指南:告别限速,免费加速下载 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 …...

Windows Subsystem for Android终极配置指南:从零到精通
Windows Subsystem for Android终极配置指南:从零到精通 【免费下载链接】WSA Developer-related issues and feature requests for Windows Subsystem for Android 项目地址: https://gitcode.com/gh_mirrors/ws/WSA 想要在Windows 11上无缝运行Android应用…...

go-rpio库SPI通信教程:从零开始掌握树莓派串行外设接口
go-rpio库SPI通信教程:从零开始掌握树莓派串行外设接口 【免费下载链接】go-rpio :electric_plug: Raspberry Pi GPIO library for go-lang 项目地址: https://gitcode.com/gh_mirrors/go/go-rpio 树莓派作为一款广受欢迎的单板计算机,其强大的GP…...

Realistic Vision V5.1 角色一致性挑战:生成同一人物多角度、多表情序列图
Realistic Vision V5.1 角色一致性挑战:生成同一人物多角度、多表情序列图 在AI图像生成的世界里,让模型“记住”一个虚构的人物,并让它从不同角度、带着不同表情“出镜”,一直是个挺有意思的难题。你肯定也遇到过,想…...