论文速读《DeepFusion: Lidar-Camera Deep Fusion for Multi-Modal 3D Object Detection》
概括主要内容
文章《DeepFusion: Lidar-Camera Deep Fusion for Multi-Modal 3D Object Detection》提出了两种创新技术,以改善多模态3D检测模型的性能,通过更有效地融合相机和激光雷达传感器数据来提高对象检测的准确性,尤其是在行人检测方面。
这两种技术包括:
①InverseAug:该技术通过逆转几何相关的增强,如旋转,使激光雷达点和图像像素之间能够精确地几何对齐。它旨在纠正从两种不同传感器类型的数据组合时可能出现的扭曲和不对齐问题。
②LearnableAlign:该方法利用交叉注意力机制在融合过程中动态捕捉图像和激光雷达特征之间的相关性。它设计确保结合的传感器数据更准确地对齐,从而提升对象检测性能。
重点解释
①InverseAug 的核心思想是逆转几何相关的数据增强,例如随机旋转。在增强阶段,InverseAug会保存这些增强参数,然后在融合阶段逆向应用这些增强来获取3D关键点的原始坐标,最终找到它们在相机空间中的对应2D坐标。这种方法是通用的,可以对齐不同类型的关键点,如体素中心等,尽管为了简化,论文中只采用了激光雷达点。InverseAug通过这种方式显著提高了对齐质量。
②LearnableAlign 则利用交叉注意力机制动态学习激光雷达特征及其相应相机特征之间的相关性。这种方法允许模型在融合过程中学习如何更好地对齐不同传感器的数据,而不是简单地基于原始的激光雷达和相机参数。LearnableAlign通过这种学习机制有助于实现精确的特征级融合,从而提升检测模型的性能。
这两种技术都是简单、通用且高效的,能够在流行的3D点云检测框架(如PointPillars和CenterPoint)中实现与激光雷达点云的有效对齐,而且计算成本较低(即只需要一个交叉注意力层)
论文原文
链接:https://pan.baidu.com/s/1wKS2X8pCHlqVNA9_CXPcnQ
提取码:vn0d
论文结构
介绍(Introduction):
论文开头介绍了激光雷达和相机作为互补的传感器在自动驾驶中的重要性,指出现有多模态方法简单地将相机特征与原始激光雷达点云相结合,直接输入到现有3D检测模型中,并没有充分利用这些特征(比如PointPainting)。为了解决这一问题,提出了两种新颖的技术:InverseAug和LearnableAlign。
相关工作(Related Work):
在这一部分中,讨论了关于3D对象检测的先前研究,包括仅使用激光雷达点云的方法,以及尝试融合激光雷达和相机数据的不同方法。
DeepFusion:
3.1 深度特征融合管道(Deep Feature Fusion Pipeline):
描述了如何融合深度激光雷达特征和相机特征,而不是在输入级别上装饰原始激光雷达点。
3.2 对齐质量的影响(Impact of Alignment Quality):
讨论了在深度特征融合中对齐质量的重要性,并展示了对齐不准确会如何影响检测模型的性能。
3.3 提升对齐质量(Boosting Alignment Quality):
提出InverseAug和LearnableAlign这两种技术以改善深度特征的对齐。
实验(Experiments):
4.1 实施细节(Implementation Details):
描述了实验设置,包括数据集和评估指标。
4.2 在Waymo数据上的最先进性能(State-of-the-art performance on Waymo Data):
展示了DeepFusion在Waymo开放数据集上与现有方法相比的性能提升。
4.3 DeepFusion是一个通用的融合方法(DeepFusion is a generic fusion method):
证明了DeepFusion方法可以广泛应用于多种3D检测框架,并提供了一致的性能提升。
4.4 改进来源(Where does the improvement come from?):
分析了DeepFusion如何利用相机信号改进3D对象检测模型。
4.5 InverseAug和LearnableAlign的影响(Impact of InverseAug and LearnableAlign):
通过消融实验验证了这两种方法对性能的贡献。
4.6 DeepFusion是一个有效的融合策略(DeepFusion is an effective fusion strategy):
将DeepFusion与其他融合策略进行比较,证明其优越性。
4.7 DeepFusion更加稳健(DeepFusion is more robust):
测试了DeepFusion在输入损坏和分布外数据上的模型鲁棒性。
结论(Conclusion):
总结了论文的主要贡献,即通过InverseAug和LearnableAlign技术,开发了一个简单、通用但有效的多模态3D检测器系列DeepFusions,该系列在Waymo开放数据集上实现了最先进的性能。
论文中提供了实验数据和表格,展示了DeepFusion方法在多个基准测试上的性能提升和鲁棒性。
相关文章:

论文速读《DeepFusion: Lidar-Camera Deep Fusion for Multi-Modal 3D Object Detection》
概括主要内容 文章《DeepFusion: Lidar-Camera Deep Fusion for Multi-Modal 3D Object Detection》提出了两种创新技术,以改善多模态3D检测模型的性能,通过更有效地融合相机和激光雷达传感器数据来提高对象检测的准确性,尤其是在行人检测方面…...
)
关于前端处理后端轮询的操作 (总结)
使用场景:前端首次发起请求获取数据,若失败则每隔1s发起一次知道成功获取数据为止解决方案: 使用轮询操作,涉及定时器的使用和关闭 (使用vue2代码为例) data() {return {pollingResult_en: null, // 处理轮询结果bizI…...
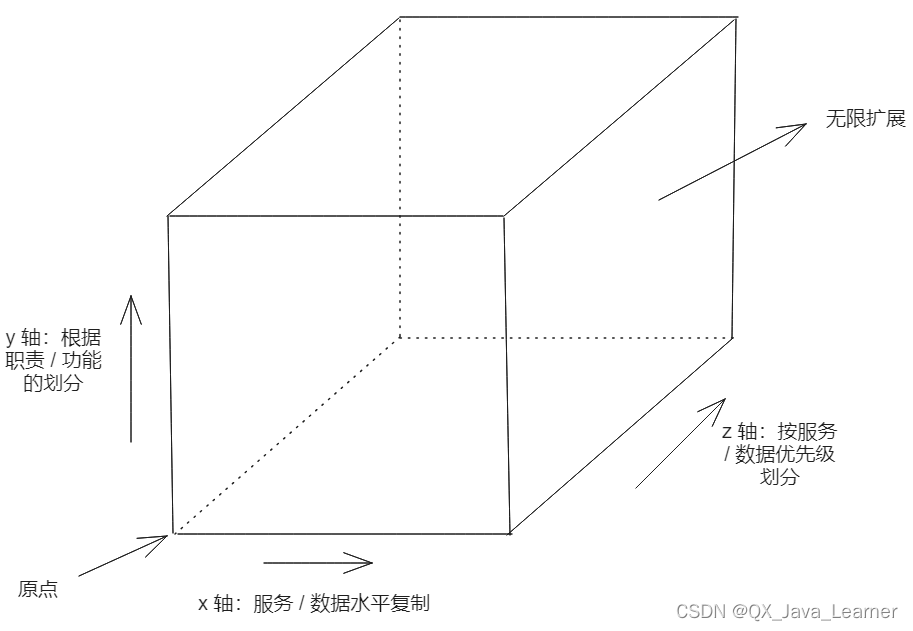
【SpringCloud】设计原则之单一职责与服务拆分
一、设计原则之单一职责 设计原则很重要的一点就是简单,单一职责也就是所谓的专人干专事 一个单元(一个类、函数或微服务)应该有且只有一个职责 无论如何,一个微服务不应该包含多于一个的职责 职责单一的后果之一就是职责单…...

UDP分片和丢包与TCP效果对比
UDP 分片 与 丢包,UDP 真的比 TCP 高效吗? UDP(用户数据报协议)和TCP(传输控制协议)在很多方面都有显著的区别。总体来说,TCP更适合需要可靠传输的应用,例如网页浏览、电子邮件等&a…...
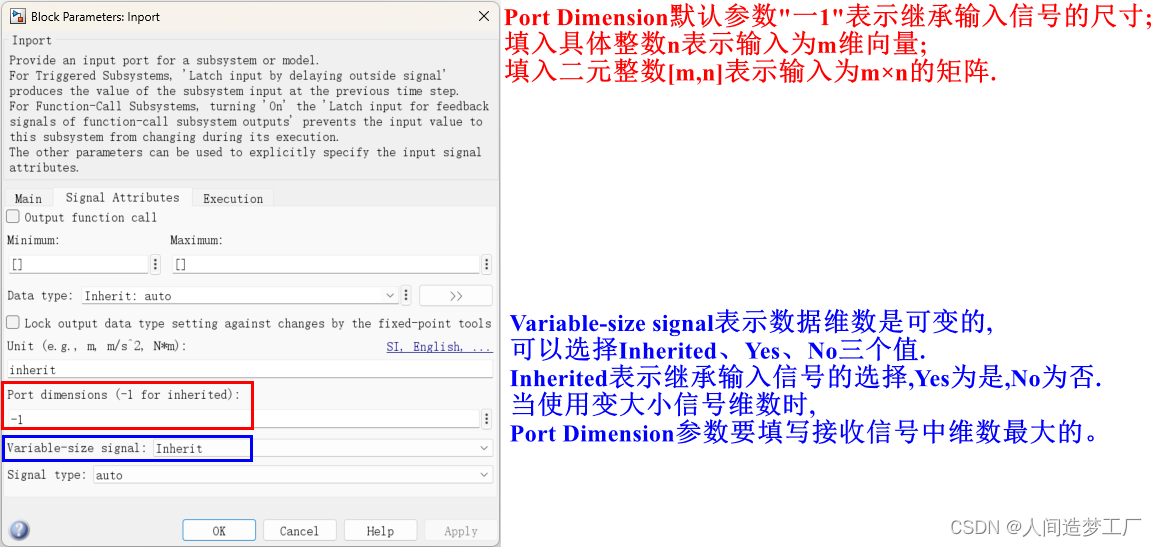
Inport 模块
文章目录 Interpolate datainport 模块存在于模型最顶层Port Dimension 和 Variable-size signal Interpolate data Interpolate data:当将 Workspace 的数据导人模型时, 对没有对应数据点的采样时刻进行线性插值的开关选项。 inport 模块存在于模型最顶层 inpo…...
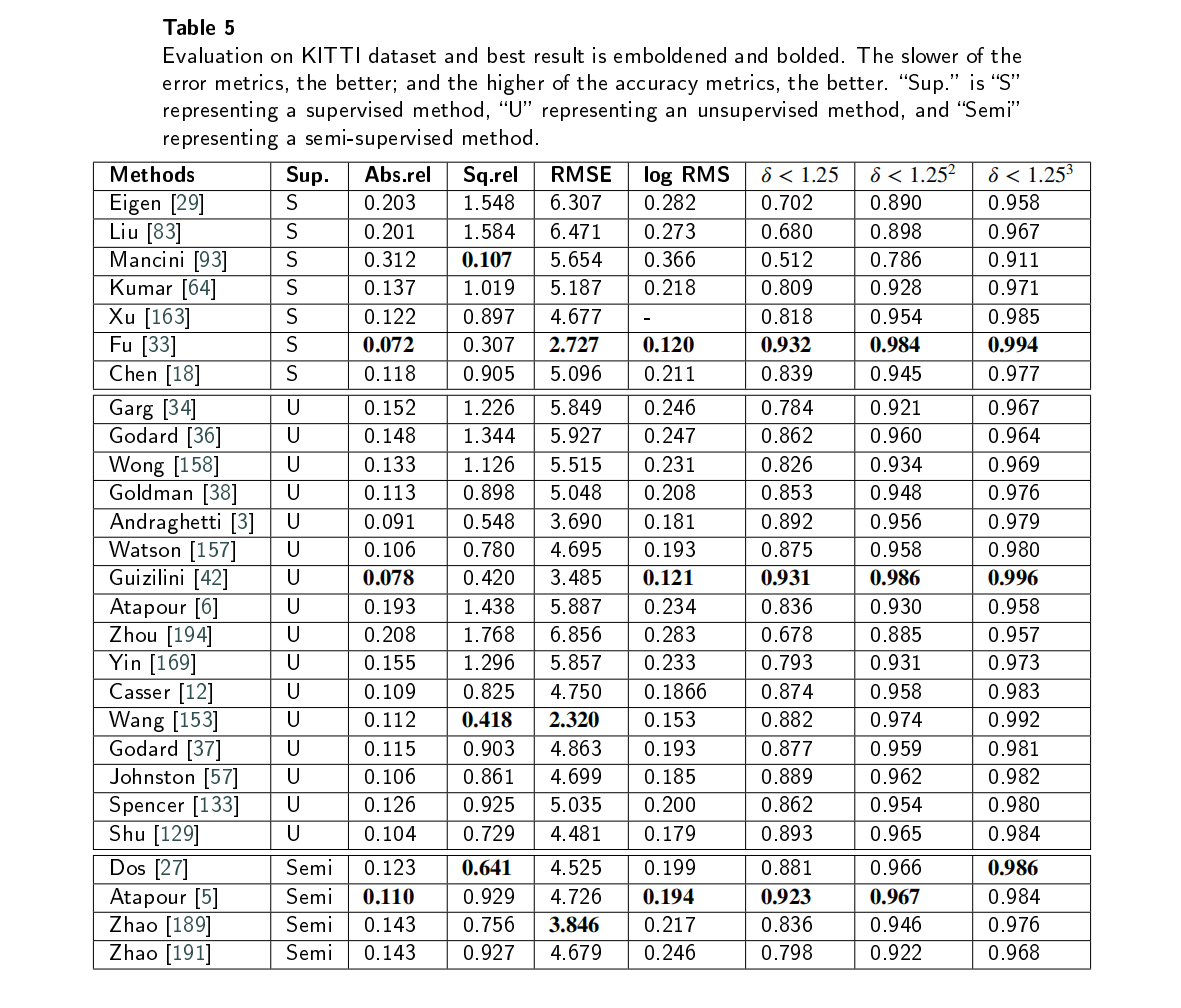
Deep Learning for Monocular Depth Estimation: A Review.基于深度学习的深度估计
传统的深度估计方法通常是使用双目相机,计算两个2D图像的视差,然后通过立体匹配和三角剖分得到深度图。然而,双目深度估计方法至少需要两个固定的摄像机,当场景的纹理较少或者没有纹理的时候,很难从图像中捕捉足够的特…...
)
点云从入门到精通技术详解100篇-基于深度学习的稀疏点云障碍物检测(续)
目录 3.1 连续帧点云空间特征融合 3.1.1 点云预处理 3.1.2 地面分割 3.1.3 自适应点云聚类...
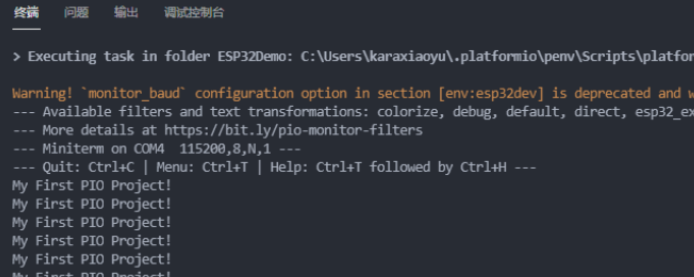
使用VSCode+PlatformIO搭建ESP32开发环境
Arduino IDE本来就是为创客们开发的,虽然没代码提示功能,文件的关系也不清晰,函数不能跳转,头文件也打不开,但人家的初衷就是为了简单而生的;但还是有一些同学喜欢高级点的IDE,也没问题…...

使用flask返回json格式的数据
Flask Flask是一个使用Python编写的轻量级Web框架,它的设计理念是保持简单、灵活和易扩展。它的核心是Werkzeug和Jinja2,并且它本身只提供了非常基础的Web框架功能,例如路由和请求处理等。 使用Flask可以快速创建一个Web应用程序,…...

如何排查java 内存溢出OutOfMemoryError?
当使用Spring Boot进行文件上传时,文件会被读取到内存中进行处理。如果上传的文件较大,会占用大量的内存空间,从而导致内存溢出(OutOfMemory)问题。以下是一些建议的排查方案: 调整 JVM 内存设置ÿ…...

Prometheus环境搭建和认识
Prometheus 环境搭建 1.prometheus 简介 Prometheus是基于go语言开发的一套开源的监控、报警和时间序列数据库的组合,是由SoundCloud公司开发的开源监控系统,Prometheus于2016年加入CNCF(Cloud Native Computing Foundation,云原生计算基金…...

openGauss学习笔记-130 openGauss 数据库管理-参数设置-重设参数
文章目录 openGauss学习笔记-130 openGauss 数据库管理-参数设置-重设参数130.1 背景信息130.2 GUC参数设置130.3 操作步骤130.4 示例 openGauss学习笔记-130 openGauss 数据库管理-参数设置-重设参数 130.1 背景信息 openGauss提供了多种修改GUC参数的方法,用户可…...
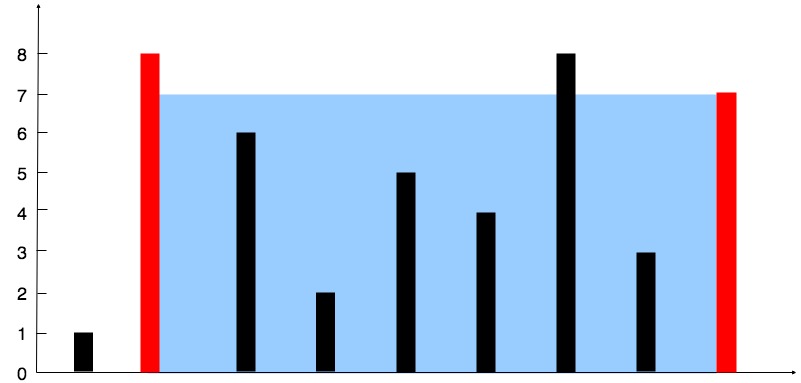
每日OJ题_算法_双指针_力扣11. 盛最多水的容器
力扣11. 盛最多水的容器 11. 盛最多水的容器 - 力扣(LeetCode) 难度 中等 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成…...

数据仓库
一. 各种名词解释 1.1 ODS是什么? ODS层最好理解,基本上就是数据从源表拉过来,进行etl,比如mysql 映射到hive,那么到了hive里面就是ods层。 ODS 全称是 Operational Data Store,操作数据存储.“面向主题的…...
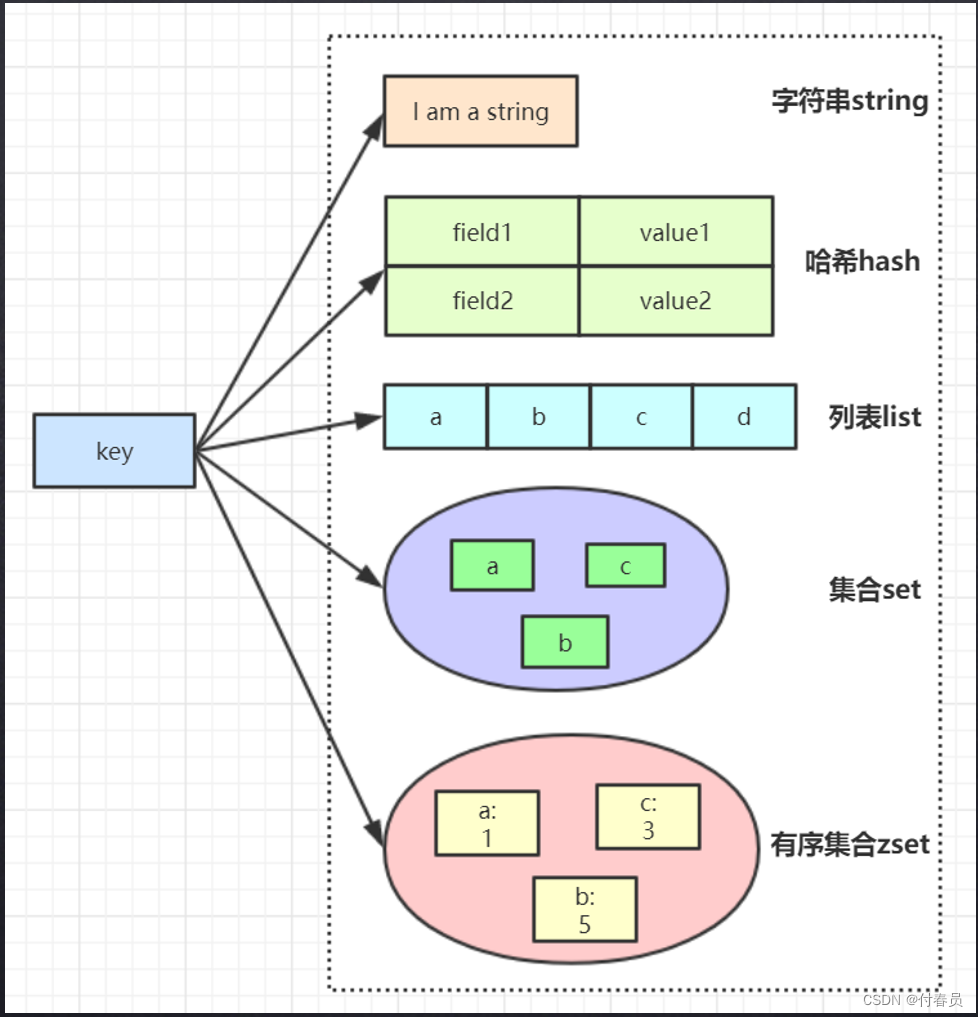
Redis常用操作及应用(一)
一、五种数据结构 二、String结构 1、字符串常用操作 SET key value //存入字符串键值对 MSET key value [key value ...] //批量存储字符串键值对 SETNX key value //存入一个不存在的字符串键值对 GET key //获取一个字符串键值 MGET key [ke…...
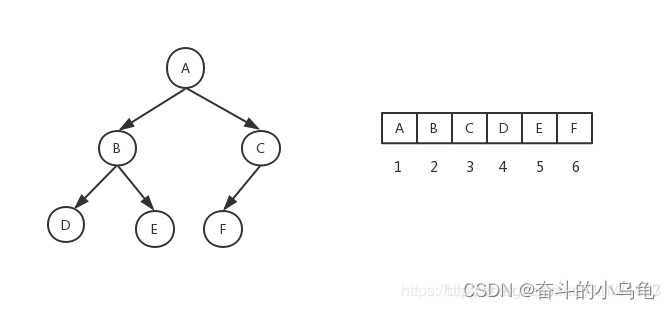
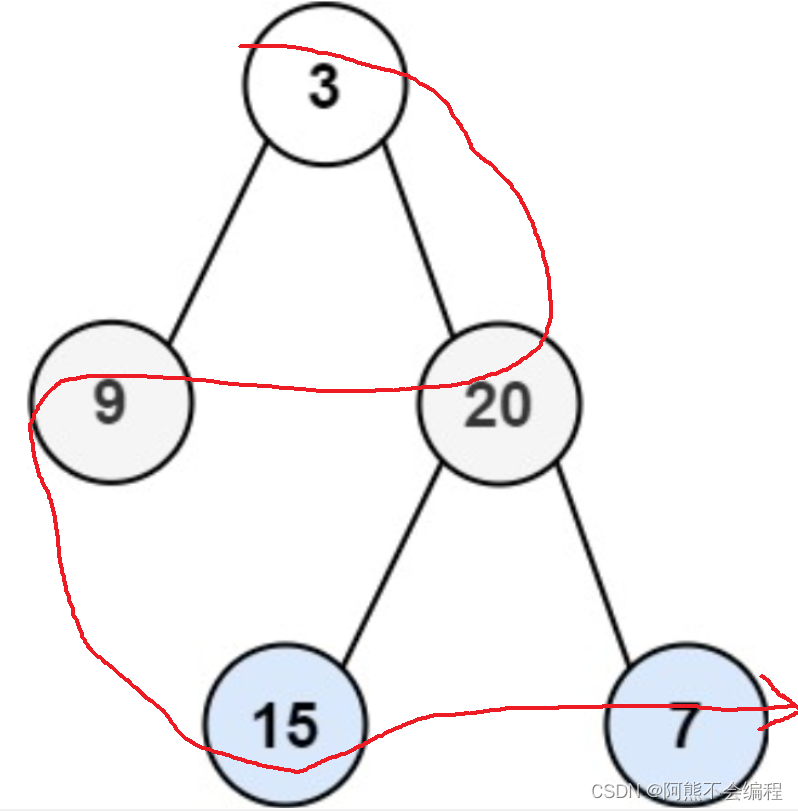
数据结构-树
参考:https://www.hello-algo.com/chapter_tree/binary_tree/#711 1. 介绍 树存储不同于数组和链表的地方在于既可以保证数据检索的速度,又可以保证数据插入删除修改的速度,二者兼顾。 二叉树是一种很重要的数据结构,是非线性的…...
解决ElementUI时间选择器回显出现Wed..2013..中国标准时间.
使用饿了么组件 时间日期选择框回显到页面为啥是这样的? 为什么再时间框中选择日期,回显页面出现了这种英文格式呢???? 其实这个问题直接使用elementui的内置属性就能解决 DateTimePicker 日期时间选择…...

从0到0.01入门 Webpack| 004.精选 Webpack面试题
🤍 前端开发工程师(主业)、技术博主(副业)、已过CET6 🍨 阿珊和她的猫_CSDN个人主页 🕠 牛客高级专题作者、在牛客打造高质量专栏《前端面试必备》 🍚 蓝桥云课签约作者、已在蓝桥云…...
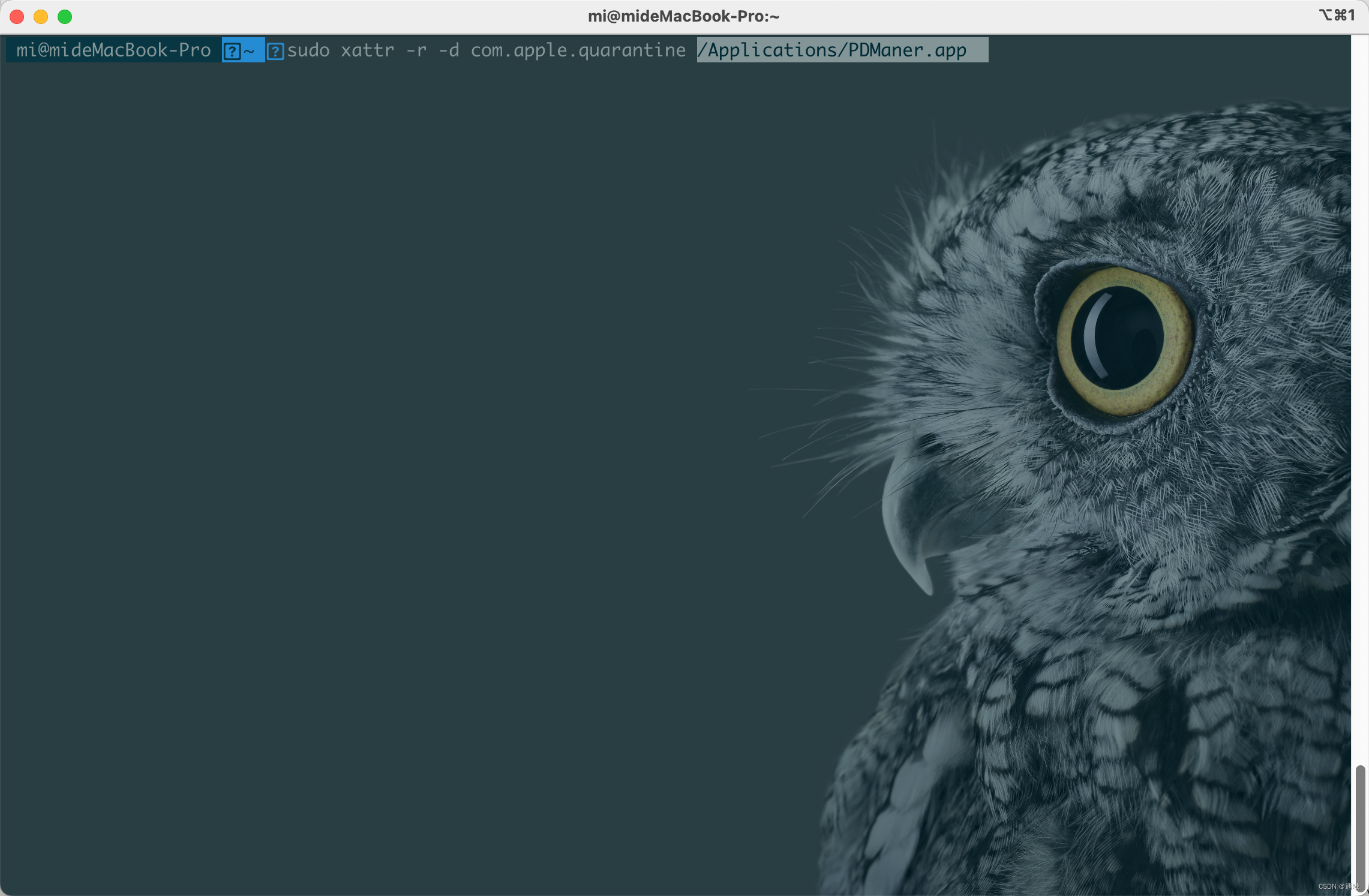
MacOS “xxxxx“,已损坏,无法打开,你应该将它移到废纸篓
在这里插入图片描述 解决方案 应用程序 - 实用工具中打开终端,输入命令, sudo xattr -r -d com.apple.quarantine 然后将程序拖放至命令窗口,如下图:...
每日一题:LeetCode-103/107.二叉树的(层序/锯齿形层序)遍历
每日一题系列(day 04) 前言: 🌈 🌈 🌈 🌈 🌈 🌈 🌈 🌈 🌈 🌈 🌈 🌈 🌈 🔎…...

如何高效使用BaiduPCS-Go:百度网盘命令行客户端的完整指南
如何高效使用BaiduPCS-Go:百度网盘命令行客户端的完整指南 【免费下载链接】BaiduPCS-Go iikira/BaiduPCS-Go原版基础上集成了分享链接/秒传链接转存功能 项目地址: https://gitcode.com/GitHub_Trending/ba/BaiduPCS-Go 还在为百度网盘的下载限速而烦恼吗&a…...

Calibre中文路径保护插件:告别拼音路径,让中文电子书管理更优雅
Calibre中文路径保护插件:告别拼音路径,让中文电子书管理更优雅 【免费下载链接】calibre-do-not-translate-my-path Switch my calibre library from ascii path to plain Unicode path. 将我的书库从拼音目录切换至非纯英文(中文࿰…...

TI毫米波雷达选型指南:IWR6843 vs IWR1843性能对比与实战场景解析
TI毫米波雷达选型指南:IWR6843 vs IWR1843性能对比与实战场景解析 毫米波雷达技术正在重塑工业检测、智能交通和自动化控制领域的感知能力。作为该领域的核心器件,德州仪器(TI)的IWR系列毫米波雷达凭借其高集成度和卓越性能&…...

UE5蓝图实战:用VaRest插件5分钟搞定天气API调用与JSON数据解析
UE5蓝图实战:用VaRest插件5分钟搞定天气API调用与JSON数据解析 在游戏开发中,实时数据集成已经成为提升玩家体验的重要手段之一。想象一下,你的开放世界游戏能够根据现实世界的天气变化动态调整游戏内的气候效果,或者你的城市模拟…...

Zynq启动时MIO[6]下拉电阻的秘密:硬件设计如何影响PS的PLL初始化流程
Zynq启动时MIO[6]下拉电阻的秘密:硬件设计如何影响PS的PLL初始化流程 在Zynq SoC的系统设计中,硬件工程师往往更关注电源完整性、信号完整性和PCB布局布线,而忽略了某些看似微不足道的硬件配置对系统启动流程的深远影响。MIO[6]引脚的下拉电阻…...

深度解析:SensitivityMatcher如何通过多周期监控算法实现跨游戏鼠标灵敏度精准转换
深度解析:SensitivityMatcher如何通过多周期监控算法实现跨游戏鼠标灵敏度精准转换 【免费下载链接】SensitivityMatcher Script that can be used to convert your mouse sensitivity between different 3D games. 项目地址: https://gitcode.com/gh_mirrors/se/…...

Navicat重置试用期终极指南:免费无限使用Navicat Premium完整功能
Navicat重置试用期终极指南:免费无限使用Navicat Premium完整功能 【免费下载链接】navicat_reset_mac navicat mac版无限重置试用期脚本 Navicat Mac Version Unlimited Trial Reset Script 项目地址: https://gitcode.com/gh_mirrors/na/navicat_reset_mac …...
)
调参避坑指南:FCM算法中那个神秘的加权指数m到底怎么选?(附Python实验)
FCM算法调参实战:揭秘加权指数m对聚类效果的深层影响 模糊C均值(Fuzzy C-Means, FCM)算法作为经典软聚类方法,其核心参数加权指数m的选择往往让实践者感到困惑。这个看似简单的参数实际上控制着聚类结果的模糊程度和算法收敛性&am…...

SystemVerilog里用disable fork踩过的坑:一个fork套娃引发的‘误杀’血案
SystemVerilog中disable fork的精确控制:从"误杀"到线程安全 最近在调试一个复杂的验证环境时,遇到了一个诡异的并发问题:某些后台监控任务会莫名其妙地消失。经过几天的追踪,发现问题出在一个看似无害的disable fork语…...

5分钟掌握Nexus Mods App:告别模组冲突的终极解决方案
5分钟掌握Nexus Mods App:告别模组冲突的终极解决方案 【免费下载链接】NexusMods.App Home of the development of the Nexus Mods App 项目地址: https://gitcode.com/gh_mirrors/ne/NexusMods.App 还在为模组冲突、依赖缺失而烦恼吗?Nexus Mod…...