基于 GPS 定位信息的 Pure-Pursuit 轨迹跟踪实车测试(1)
基于 GPS 定位信息的 Pure-Pursuit 轨迹跟踪实车测试(1)
进行了多组实验,包括顺逆时针转向,直线+圆弧轨迹行驶,以及Pure-Pursuit 轨迹跟踪测试
代码修改
需要修改的代码并不多,主要对 gps_sensor 功能包和 purepursuit 代码的修改
- gps_sensor 发布机器人实际运动轨迹,而不是在 purepursuit 中发布
- gps_sensor 同时实现 mrobot_states_update 功能包的功能,发布机器人状态信息
- purepursuit 将最终的控制指令发送给实际机器人,cmd_to_robot 代替 cmd_to_mrobot
#include <ros/ros.h>
#include <sensor_msgs/NavSatFix.h>
#include <geometry_msgs/PoseStamped.h>
#include <geometry_msgs/TwistStamped.h>
#include <nav_msgs/Path.h>#include <math.h>
#include <iostream>
#include <Eigen/Geometry>
#include <chrono>using namespace std;struct my_pose
{double latitude;double longitude;double altitude;
};struct my_location
{double x;double y;
};// 角度制转弧度制
double rad(double d)
{return d * M_PI / 180.0;
}array<float, 4> calEulerToQuaternion(const float roll, const float pitch, const float yaw)
{array<float, 4> calQuaternion = {0.0f, 0.0f, 0.0f, 1.0f}; // 初始化四元数// 使用Eigen库来进行四元数计算Eigen::Quaternionf quat;quat = Eigen::AngleAxisf(roll, Eigen::Vector3f::UnitX()) *Eigen::AngleAxisf(pitch, Eigen::Vector3f::UnitY()) *Eigen::AngleAxisf(yaw, Eigen::Vector3f::UnitZ());calQuaternion[0] = quat.x();calQuaternion[1] = quat.y();calQuaternion[2] = quat.z();calQuaternion[3] = quat.w();return calQuaternion;
}// 全局变量
ros::Publisher state_pub_;
nav_msgs::Path ros_path_;
ros::Publisher vel_pub;
ros::Publisher pose_pub;const double EARTH_RADIUS = 6371.393; // 6378.137;地球半径bool init = false;
my_pose init_pose;// 计算速度
my_location pre_location;
my_location curr_location;
chrono::_V2::system_clock::time_point pre_time;
chrono::_V2::system_clock::time_point curr_time;void gpsCallback(const sensor_msgs::NavSatFixConstPtr &gps_msg_ptr)
{// 初始化if (!init){init_pose.latitude = gps_msg_ptr->latitude;init_pose.longitude = gps_msg_ptr->longitude;init_pose.altitude = gps_msg_ptr->altitude;init = true;}else{// 计算相对位置double radLat1, radLat2, radLong1, radLong2, delta_lat, delta_long;radLat1 = rad(init_pose.latitude);radLong1 = rad(init_pose.longitude);radLat2 = rad(gps_msg_ptr->latitude);radLong2 = rad(gps_msg_ptr->longitude);// 计算xdelta_lat = radLat2 - radLat1;delta_long = 0;double x = 2 * asin(sqrt(pow(sin(delta_lat / 2), 2) + cos(radLat1) * cos(radLat2) * pow(sin(delta_long / 2), 2)));x = x * EARTH_RADIUS * 1000;// 计算ydelta_lat = 0;delta_long = radLong1 - radLong2;double y = 2 * asin(sqrt(pow(sin(delta_lat / 2), 2) + cos(radLat2) * cos(radLat2) * pow(sin(delta_long / 2), 2)));y = y * EARTH_RADIUS * 1000;// 计算yawarray<float, 4> calQuaternion = calEulerToQuaternion(0.0, 0.0, gps_msg_ptr->altitude);// 发布轨迹ros_path_.header.frame_id = "world";ros_path_.header.stamp = ros::Time::now();geometry_msgs::PoseStamped pose;pose.header = ros_path_.header;pose.pose.position.x = x;pose.pose.position.y = y;pose.pose.orientation.x = calQuaternion[0];pose.pose.orientation.y = calQuaternion[1];pose.pose.orientation.z = calQuaternion[2];pose.pose.orientation.w = calQuaternion[3]; ros_path_.poses.push_back(pose); // 计算速度curr_location.x = x;curr_location.y = y;curr_time = chrono::system_clock::now();auto timeDifference = curr_time - pre_time;auto durationInMilliseconds = chrono::duration_cast<chrono::milliseconds>(timeDifference);double displacement = sqrt(pow(curr_location.x - pre_location.x, 2) + pow(curr_location.y - pre_location.y, 2));geometry_msgs::TwistStamped vel;// v = s / tvel.twist.linear.x = displacement / durationInMilliseconds.count() * 1000;// 更新信息pre_location = curr_location;pre_time = curr_time;cout << "位姿信息:" << endl;cout << x << "," << y << "," << gps_msg_ptr->altitude << endl;cout << "速度信息:" << endl;cout << vel.twist.linear.x << endl;cout << "---------" << endl;// 信息发布vel_pub.publish(vel);pose_pub.publish(pose); state_pub_.publish(ros_path_);}
}int main(int argc, char **argv)
{init = false;ros::init(argc, argv, "gps_subscriber");ros::NodeHandle n;ros::Subscriber pose_sub = n.subscribe("/robot_gps", 10, gpsCallback);state_pub_ = n.advertise<nav_msgs::Path>("/gps_path", 10);vel_pub = n.advertise<geometry_msgs::TwistStamped>("/center_velocity", 10);pose_pub = n.advertise<geometry_msgs::PoseStamped>("/center_pose", 10);ros::spin();return 0;
}
#include <geometry_msgs/Twist.h>
#include <geometry_msgs/PoseStamped.h>
#include <nav_msgs/Path.h>
#include <ros/ros.h>
#include <tf/tf.h>
#include <tf/transform_broadcaster.h>#include <algorithm>
#include <cassert>
#include <cmath>
#include <fstream>
#include <iostream>
#include <string>
#include <vector>
#include "cpprobotics_types.h"#define PREVIEW_DIS 1.0 // 预瞄距离
#define Ld 0.55 // 轴距using namespace std;
using namespace cpprobotics;ros::Publisher purepersuit_;const float target_vel = 0.2;
float carVelocity = 0;
float preview_dis = 0;
float k = 0.1;// 计算四元数转换到欧拉角
std::array<float, 3> calQuaternionToEuler(const float x, const float y,const float z, const float w)
{std::array<float, 3> calRPY = {(0, 0, 0)};// roll = atan2(2(wx+yz),1-2(x*x+y*y))calRPY[0] = atan2(2 * (w * x + y * z), 1 - 2 * (x * x + y * y));// pitch = arcsin(2(wy-zx))calRPY[1] = asin(2 * (w * y - z * x));// yaw = atan2(2(wx+yz),1-2(y*y+z*z))calRPY[2] = atan2(2 * (w * z + x * y), 1 - 2 * (y * y + z * z));return calRPY;
}cpprobotics::Vec_f r_x_;
cpprobotics::Vec_f r_y_;int pointNum = 0; // 保存路径点的个数
int targetIndex = pointNum - 1;// 计算发送给模型车的转角
void poseCallback(const geometry_msgs::PoseStamped ¤tWaypoint)
{auto currentPositionX = currentWaypoint.pose.position.x;auto currentPositionY = currentWaypoint.pose.position.y;auto currentPositionZ = 0.0;auto currentQuaternionX = currentWaypoint.pose.orientation.x;auto currentQuaternionY = currentWaypoint.pose.orientation.y;auto currentQuaternionZ = currentWaypoint.pose.orientation.z;auto currentQuaternionW = currentWaypoint.pose.orientation.w;std::array<float, 3> calRPY =calQuaternionToEuler(currentQuaternionX, currentQuaternionY,currentQuaternionZ, currentQuaternionW);cout << currentPositionX << "," << currentPositionY << "," << calRPY[2] << endl;for (int i = pointNum - 1; i >= 0; --i){float distance = sqrt(pow((r_x_[i] - currentPositionX), 2) +pow((r_y_[i] - currentPositionY), 2));if (distance < preview_dis){targetIndex = i + 1;break;}}if (targetIndex >= pointNum){targetIndex = pointNum - 1;}float alpha =atan2(r_y_[targetIndex] - currentPositionY, r_x_[targetIndex] - currentPositionX) -calRPY[2];// 当前点和目标点的距离Idfloat dl = sqrt(pow(r_y_[targetIndex] - currentPositionY, 2) +pow(r_x_[targetIndex] - currentPositionX, 2));// 发布小车运动指令及运动轨迹geometry_msgs::Twist vel_msg;vel_msg.linear.z = 1.0;if (dl <= 0.2) // 离终点很近时停止运动{vel_msg.linear.x = 0;vel_msg.angular.z = 0;purepersuit_.publish(vel_msg);}else{float theta = atan(2 * Ld * sin(alpha) / dl);vel_msg.linear.x = target_vel;vel_msg.angular.z = theta;purepersuit_.publish(vel_msg);}
}void velocityCall(const geometry_msgs::TwistStamped &carWaypoint)
{carVelocity = carWaypoint.twist.linear.x;// 预瞄距离计算preview_dis = k * carVelocity + PREVIEW_DIS;
}void pointCallback(const nav_msgs::Path &msg)
{// 避免参考点重复赋值if (pointNum != 0){return;}// geometry_msgs/PoseStamped[] posespointNum = msg.poses.size();// 提前开辟内存r_x_.resize(pointNum);r_y_.resize(pointNum);for (int i = 0; i < pointNum; i++){r_x_[i] = msg.poses[i].pose.position.x;r_y_[i] = msg.poses[i].pose.position.y;}
}int main(int argc, char **argv)
{// 创建节点ros::init(argc, argv, "pure_pursuit");// 创建节点句柄ros::NodeHandle n;// 创建Publisher,发送经过pure_pursuit计算后的转角及速度purepersuit_ = n.advertise<geometry_msgs::Twist>("/cmd_vel", 20);ros::Subscriber splinePath = n.subscribe("/ref_path", 20, pointCallback);ros::Subscriber carVel = n.subscribe("/center_velocity", 20, velocityCall);ros::Subscriber carPose = n.subscribe("/center_pose", 20, poseCallback);ros::spin();return 0;
}
数据处理
原始的数据便于查阅,但不便于 MATLAB 进行读取分析,主要包括 ***_pub.txt 和 ***_path.txt 两种待处理数据,分别如下
$GPRMC,085750.20,A,3150.93719306,N,11717.59499143,E,0.071,252.6,161123,5.7,W,D*26数据长度:83
latitude: 31.848953217667
longitude: 117.293249857167
heading_angle_deg: 252.600000000000
heading_angle_rad: 4.408701690538
heading_angle_rad: -1.874483616642
---------
$GPRMC,085750.30,A,3150.93719219,N,11717.59498178,E,0.297,264.0,161123,5.7,W,D*28数据长度:83
latitude: 31.848953203167
longitude: 117.293249696333
heading_angle_deg: 264.000000000000
heading_angle_rad: 4.607669225265
heading_angle_rad: -1.675516081915
---------
位姿信息:
0.0169953,0.0210645,-2.24798
速度信息:
1.59198e-11
---------
位姿信息:
0.0183483,0.0200412,2.49058
速度信息:
0.0180464
---------
下面的命令首先使用**grep过滤包含"heading_angle_deg: "的行,然后使用awk**提取每行的第二个字段(即数字部分),最后将结果写入output.txt文件
grep "heading_angle_deg: " input.txt | awk '{print $2}' > output.txt
下面的命令使用**awk匹配包含"位姿信息:"的行,然后使用getline**读取下一行数据并打印出来,最后将结果写入output.txt文件
awk '/位姿信息:/ {getline; print}' input.txt > output.txt
处理前和处理后的文件目录如下
redwall@redwall-G3-3500:~/log/2023--11-16/raw$ tree
.
├── actual_path.txt
├── anticlock_path.txt
├── anticlock_pub.txt
├── clock_path.txt
├── clock_pub.txt
├── gps_path.txt
├── gps_pub.txt
├── lane_path.txt
└── lane_pub.txt
redwall@redwall-G3-3500:~/log/2023--11-16/processed$ tree
.
├── anticlock_path_pose.txt
├── anticlock_path_vel.txt
├── anticlock_pub_sift.txt
├── clock_path_pose.txt
├── clock_path_vel.txt
├── clock_pub_sift.txt
├── gps_path_pose.txt
├── gps_path_vel.txt
├── gps_pub_sift.txt
├── lane_path_pose.txt
├── lane_path_vel.txt
└── lane_pub_sift.txt
数据分析
本次有“卫星”标签的连接车后的蘑菇头,以 10 Hz 的频率获取定位数据
- 分析 lane_pub 和 lane_path(直线+圆弧轨迹运动)
由实际轨迹可知,纬度差应对应 X,经度差应对应 Y,应该修改代码

由实际航向角信息,结合实际轨迹,本次天线的基线向量应该是与正北方向重合,顺时针转向时航向角增大,说明天线安装的方式应该是正确的

- 分析 clock_pub 和 clock_path (顺时针原地转向)
主要是分析航向角信息,由于提高采样频率,因此存在很大的噪声,可以对信号进行去噪处理
本次已经尽量控制两个蘑菇头的安装,安装前用卷尺进行了安装测量,但仍存在误差
结合之前的分析记录,顺时针转向时先增大至 360,再从 0 开始继续增大,下面符合该规律

💡 人为判断的正北朝向并不和实际正北朝向重合,因此起始和终止位置并不为 0 度
- 分析 gps_pub、gps_path 和 actual_path
首先机器人是由北向南开,即初始朝向是向南,由 lane 数据可知,初始朝向是有问题的
其实 Pure-Pursuit 算法并不需要航向角信息,初始位姿是一个比较大的影响
实际速度会影响预瞄距离,实际速度较小会导致预瞄距离较小,导致控制的不稳定

存在问题
1、和 GPS 串口通信存在问题,读取配置以及信息长度方面存在问题,需要修改
2、GPS 航向角信息的获取仍存在较大问题,准确性比较低
3、GPS 对于高速移动的车辆,厘米级别的定位精度还可以,目前对于低速机器人可能不太适用
相关文章:
基于 GPS 定位信息的 Pure-Pursuit 轨迹跟踪实车测试(1)
基于 GPS 定位信息的 Pure-Pursuit 轨迹跟踪实车测试(1) 进行了多组实验,包括顺逆时针转向,直线圆弧轨迹行驶,以及Pure-Pursuit 轨迹跟踪测试 代码修改 需要修改的代码并不多,主要对 gps_sensor 功能包和…...

4.25每日一题(通过被积函数和积分区域(不等式)选正确的坐标系求二重积分)
一、正确画出积分区域;通过积分区域和被积函数选择方法 二、如何根据被积函数和积分区域正确选择通过极坐标还是根据直角坐标方程计算: (1)适合极坐标的积分区域:圆或者部分圆 (2)适合极坐标的…...

基于SpringBoot+Redis的前后端分离外卖项目-苍穹外卖(八)
套餐模块功能开发 1. 新增套餐1.1 需求分析和设计1.1.1产品原型:1.1.2接口设计:1.1.3数据库设计: 1.2 代码开发1.2.1 DishController层1.2.2 DishService接口类1.2.3 DishServiceImpl接口实现类1.2.4 DishMapper层1.2.5 DishMapper.xml1.2.6 …...
Visual NLP:图像信息自动提取的未来
本文旨在以简单的方式解释 Visual NLP 的关键概念,让你了解 Visual NLP 的含义、它的用例是什么、如何使用它以及为什么它是构建自动提取管道的未来 。 NSDT在线工具推荐: Three.js AI纹理开发包 - YOLO合成数据生成器 - GLTF/GLB在线编辑 - 3D模型格式在…...

力扣118双周赛
第 118 场双周赛 文章目录 第 118 场双周赛查找包含给定字符的单词最大化网格图中正方形空洞的面积购买水果需要的最少金币数找到最大非递减数组的长度 查找包含给定字符的单词 模拟 class Solution { public:vector<int> findWordsContaining(vector<string>&am…...
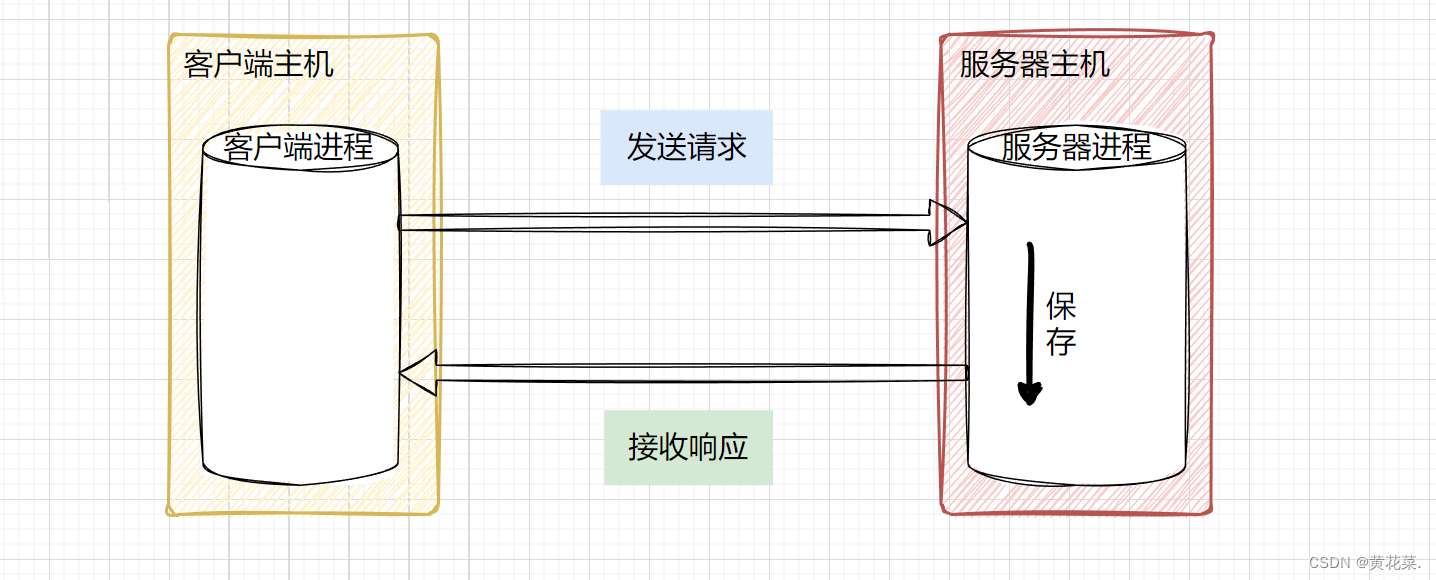
网络编程基本概念
网络编程基本概念 为什么需要网络编程? 用户在浏览器中,打开在线视频网站,如优酷看视频,实质是通过网络,获取到网络上的一个视频资源。 与本地打开视频文件类似,只是视频文件这个资源的来源是网络。 相…...

Flutter模板
简介 这个项目是Flutter应用程序的起点。与创建的官方默认模板相比,该项目实现了状态管理等功能,用于Url、本地化等的Navigator 2.0路由。 开始 该项目的入口文件为 ‘lib/init/init.dart’ 特性 状态管理 基于provider. Navigator 2.0适配 代码…...
CSP)
坐标变换(其一)CSP
坐标变换(其一) 问题描述 对于平面直角坐标系上的坐标 (x,y),小 P 定义了一个包含 n 个操作的序列 T(t1,t2,⋯,tn)。其中每个操作 ti(1≤i≤n)包含两个参数 dxi 和 dyi,表示将坐标 (x,y) 平移至 (xdxi,yd…...

C语言实现万年历
C语言实现万年历 一、项目介绍 需求和功能是用纯C语言实现一个可以属于年份,属于一个年份就可以显示该年各个月份的日历,如同日历一般,每个月当中每天对应的星期均可查看,即万年历,要求格式整齐,星期对照直…...
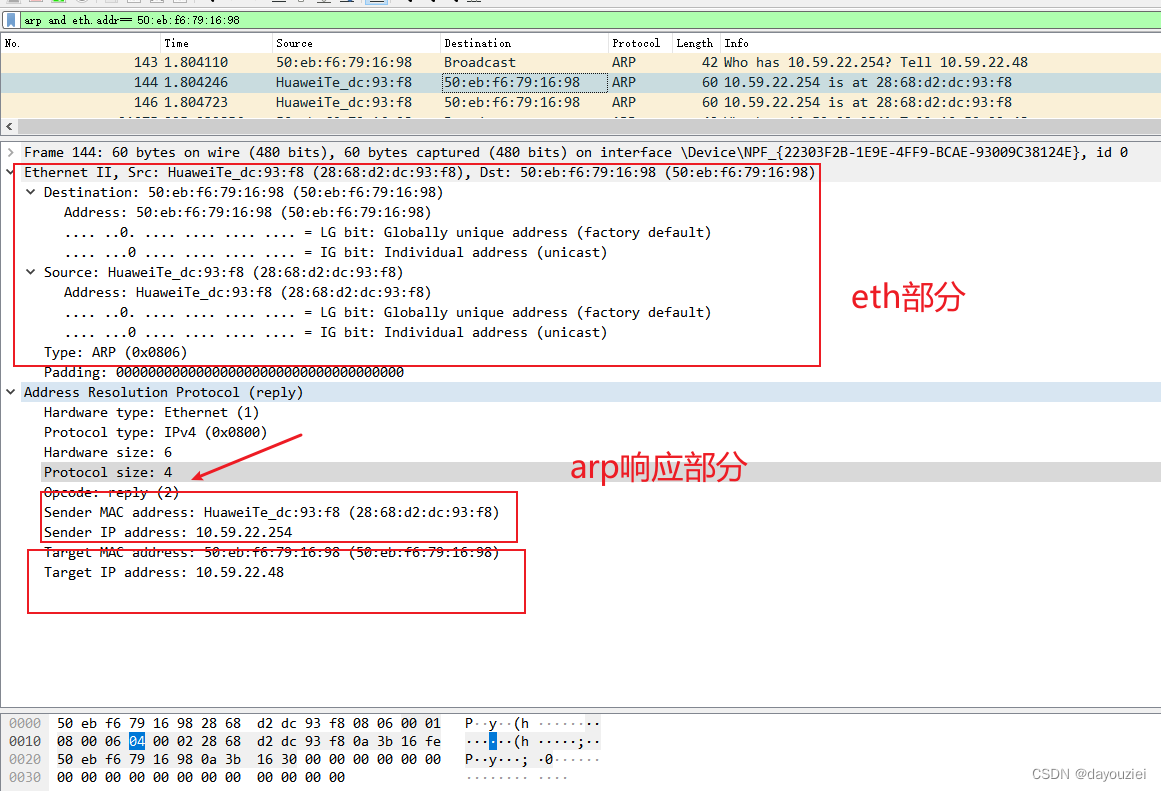
arp报文及使用go实现
一、ARP协议报文格式及ARP表 ARP(Address Resolution Protocal,地址解析协议)是将IP地址解析为以太网的MAC地址(或者称为物理地址)的协议。在局域网中,当主机或其他网络设备有数据要发送给另一个主机或设备…...

C++ 文件和流、异常处理、动态内存、预处理器
一、C文件和流: 在C中进行文件处理,需要包含头文件<iostream>和<fstream>。fstream标准库定义的三个新的数据类型: 数据类型 描述 ofstream 该数据类型表示输出文件流,用于创建文件并向文件写入信息。 ifstream …...
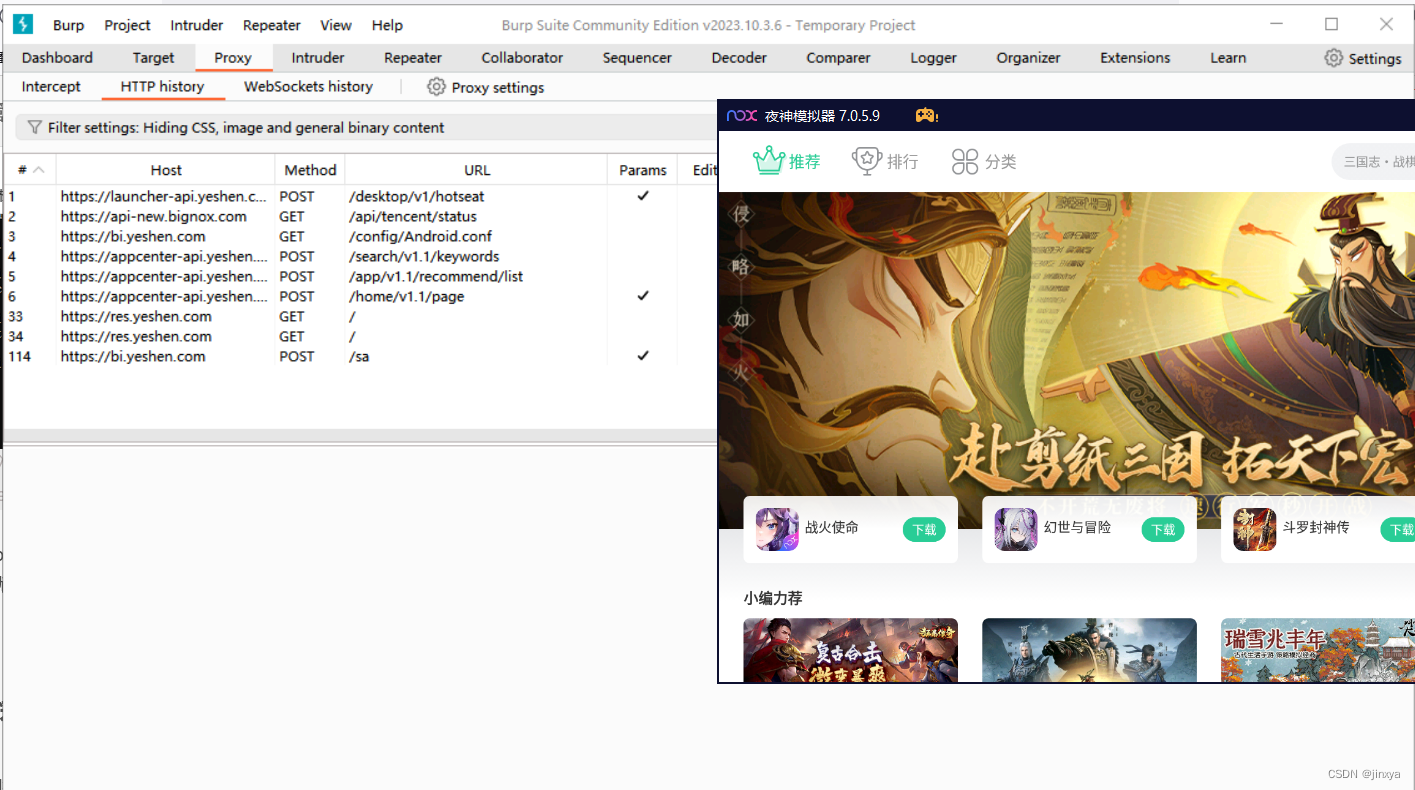
夜神模拟器 burp抓包 ADB 微信小程序
夜神模拟器 burp抓包 ADB 微信小程序 初始环境准备应用连接证书转换设置夜神模拟器环境ADB配置测试burp抓包 初始环境准备 既然想了解如何抓包,我想大多数是已经安装好 夜神模拟器 和 Burp 了,这里就不在赘述,直接开始操作。 openssl 的下载…...
WPF实战项目十七(客户端):数据等待加载弹框动画
1、在Common文件夹下新建文件夹Events,新建扩展类UpdateLoadingEvent public class UpdateModel {public bool IsOpen { get; set; }}internal class UpdateLoadingEvent : PubSubEvent<UpdateModel>{} 2、新建一个静态扩展类DialogExtensions来编写注册和推…...

22-Python与设计模式--状态模式
22-Python与设计模式–状态模式 一、电梯控制器 电梯在我们周边随处可见,电梯的控制逻辑中心是由电梯控制器实现的。电梯的控制逻辑,即使简单点设计, 把状态分成开门状态,停止状态和运行状态,操作分成开门、关门、运…...

电脑键盘推荐
一、键盘分类 (1)键位个数 目前有75,84,87,98,104,108的。 (2)薄膜键盘和机械键盘 薄膜键盘就是大多数办公室常见的键盘,主要打一个便宜,耐造…...
)
大数据-之LibrA数据库系统告警处理(ALM-37001 MPPDBServer实例Redo日志缺失)
告警解释 当DN主实例有未同步到DN备实例的xlog日志被删除时,产生该告警。 告警属性 告警ID 告警级别 可自动清除 37001 严重 是 告警参数 参数名称 参数含义 ServiceName 产生告警的服务名称 RoleName 产生告警的角色名称 HostName 产生告警的主机名…...

C#关键字、特性基础及扩展合集(持续更新)
一、基础 Ⅰ 关键字 1、record record(记录),编译器会在后台创建一个类。支持类似于结构的值定义,但被实现为一个类,方便创建不可变类型,成员在初始化后不能再被改变 (C#9新增) …...

单例模式-支持并发的C语言实现
代码实现: c #include <stdio.h> #include <stdlib.h> #include <pthread.h>// 定义单例对象结构体 typedef struct {// 单例对象的数据成员int value; } Singleton;// 静态变量,用于保存唯一实例的指针 static Singleton* instance …...

java_基础_数据类型
1.数据类型 java 语言是强类型语言,对于每一种数据都给出了明确的数据类型,不同的数据类型也分配了不同的内存空间,所以他们的数据大小也不一样的. 数据类型关键字内存占用取值范围整数byte1-128~127short2-32768~32767int4-2的31次方到2的31次方-1long8-2的63次方到2的63次方…...

C++入门第九篇---Stack和Queue模拟实现,优先级队列
前言: 我们已经掌握了string vector list三种最基本的数据容器模板,而对于数据结构的内容来说,其余的数据结构容器基本都是这三种容器的延申和扩展,在他们的基础上扩展出更多功能和用法,今天我们便来模拟实现一下C库中…...

如何快速完成Axure RP汉化:零基础用户的完整中文界面解决方案
如何快速完成Axure RP汉化:零基础用户的完整中文界面解决方案 【免费下载链接】axure-cn Chinese language file for Axure RP. Axure RP 简体中文语言包。支持 Axure 11、10、9。不定期更新。 项目地址: https://gitcode.com/gh_mirrors/ax/axure-cn 还在为…...
上的零样本迁移能力)
nomic-embed-text-v2-moe效果对比:在低资源语言(如尼泊尔语)上的零样本迁移能力
nomic-embed-text-v2-moe效果对比:在低资源语言(如尼泊尔语)上的零样本迁移能力 1. 引言:当AI遇到“小众”语言 想象一下,你正在开发一个面向全球用户的智能搜索应用。对于英语、中文这类主流语言,市面上…...

边缘计算与软件开发:新职业场景——软件测试从业者的转型指南
一、边缘计算重构软件测试疆域随着物联网设备突破300亿大关(2025年数据),边缘计算以28.3%的年复合增长率重塑IT架构。到2026年,75%的新建企业系统将采用“云-边-端”三级协同架构,这对软件测试领域带来根本性变革&…...

Earth Online网站下载ENVISAT ASAR数据:批量下载32景影像的实战经验与效率优化
Earth Online平台批量获取ENVISAT ASAR数据的工程化实践 当我们需要处理覆盖大区域或长时间序列的ENVISAT ASAR数据时,单景影像的手动下载方式会立即暴露出效率瓶颈。以一次典型的极地冰川监测项目为例,研究团队可能需要获取跨越5个冰盖区域、每季度2景的…...

对前端总体结构的认识
前端:qian/ — Vue 3 SPA 前端是一个轻量级的单页应用,使用带有 <script setup> 语法的 Vue 3 组合式 API。它作为面向用户的界面,提供认证、题目浏览和代码提交功能。 文件结构 qian/ ├── index.html ← …...
)
绿联NAS远程访问终极指南:5分钟搞定内网穿透(附SSH详细步骤)
绿联NAS远程访问实战:零基础掌握内网穿透技术 想象一下这样的场景:你正在外地出差,突然需要调取家里NAS上的一份重要文件;或是周末在咖啡馆想用手机访问公司内网的绿联NAS共享资料。传统方案需要复杂的公网IP配置和路由器端口映射…...

ComfyUI Manager终极指南:AI绘画插件管理的完整解决方案
ComfyUI Manager终极指南:AI绘画插件管理的完整解决方案 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and enable various cus…...

3大核心功能解锁Alienware设备个性化控制:告别AWCC臃肿体验
3大核心功能解锁Alienware设备个性化控制:告别AWCC臃肿体验 【免费下载链接】alienfx-tools Alienware systems lights, fans, and power control tools and apps 项目地址: https://gitcode.com/gh_mirrors/al/alienfx-tools 你是否厌倦了Alienware Command…...

KART-RERANK模型解析:互联网时代信息过载的智能过滤利器
KART-RERANK模型解析:互联网时代信息过载的智能过滤利器 每天一睁眼,手机里就塞满了未读消息:几十条群聊、上百条朋友圈、几十个App推送,还有永远刷不完的新闻和短视频。想找昨天朋友分享的那篇有趣的文章?得在信息洪…...

Z-Image-Turbo新手教程:无需代码,用Gradio界面轻松玩转AI绘画
Z-Image-Turbo新手教程:无需代码,用Gradio界面轻松玩转AI绘画 1. 为什么选择Z-Image-Turbo? 如果你正在寻找一个既强大又易用的AI绘画工具,Z-Image-Turbo绝对值得一试。这个由阿里巴巴通义实验室开源的高效文生图模型࿰…...