卡尔曼滤波
通过 Eigen 矩阵运算实现线性卡尔曼滤波。模拟的是一辆带火箭发动机的汽车,一开始沿着X轴匀速运动,到X轴中间开启火箭发动机匀加速向Y轴起飞。同理可以仿真(x,y,z,yaw,pitch,raw) 6自由度的真实飞行情况
#include <iostream>
#include <Eigen/LU>
#include <Eigen/core>using namespace Eigen;using Matrix6f = Eigen::Matrix<float, 6, 6>;
using Vector6f = Eigen::Matrix<float, 6, 1>;class CalmanFilter
{
public:CalmanFilter(){// 初始状态不确定度P << std::pow(0,2), 0, 0, 0, 0, 0, 0, std::pow(1,2), 0, 0, 0, 0,0, 0, std::pow(0.1,2), 0, 0, 0,0, 0, 0, std::pow(0,2), 0, 0,0, 0, 0, 0, std::pow(1,2), 0,0, 0, 0, 0, 0, std::pow(0.1, 2);// 环境不确定度Q << std::pow(0,2), 0, 0, 0, 0, 0, 0, std::pow(0,2), 0, 0, 0, 0,0, 0, std::pow(0,2), 0, 0, 0,0, 0, 0, std::pow(0,2), 0, 0,0, 0, 0, 0, std::pow(0,2), 0,0, 0, 0, 0, 0, std::pow(0,2);// 测量不确定度float xVariance = 5;float yVariance = 5;R << std::pow(xVariance,2), 0,0, std::pow(xVariance,2);// 隐变量到观测变量的映射H << 1, 0, 0, 0, 0, 0,0, 0, 0, 1, 0, 0;}void init(const Vector6f& x){this->x = x;this->fx = x;}Matrix6f getA(float dt){Matrix6f A;A << 1, dt, 0.5*dt*dt, 0, 0, 0, 0, 1, dt, 0, 0, 0,0, 0, 1, 0, 0, 0,0, 0, 0, 1, dt, 0.5*dt*dt,0, 0, 0, 0, 1, dt,0, 0, 0, 0, 0, 1;return A;}Matrix<float, 6, 2> getB(float dt){Matrix<float, 6, 2> B;B << 0.5*dt*dt, 0,dt, 0,0, 0,0, 0.5*dt*dt,0, dt,0, 0;return B;}void forcast(const Matrix6f& A, const Matrix<float, 6, 2>& B, const Vector2f& u){fx = A * x + B * u;fP = A * P * A.transpose() + Q;}void calibration(const Vector2f& z){Matrix<float, 6, 2> K = P * H.transpose() * (H * P * H.transpose() + R).inverse();x = fx + (K * (z - H * fx));P = fP - K * H * fP;}Vector2f getEstimation() const{return H * x;}private:Vector6f fx; // x, vx, ax, y, vy, ayMatrix6f fP; // fx 的协方差Matrix6f Q; // 环境干扰协方差Vector6f x; // fx 校准值Matrix6f P; // fP 校准值Matrix2f R; // 观测协方差Matrix<float, 2, 6> H; // 隐状态到观测状态的映射
};int main()
{// 测试数据float a = 1.1;std::vector<Vector2f> real;std::vector<Vector2f> observations;for (int i = 0; i < 100; ++i) {float x = i;float y = 0;if (i >= 50) {float t = (i - 50)/10.;y = 0.5 * a * t * t;}real.emplace_back(x, y);observations.emplace_back(x + rand() % 5, y + rand() % 5);}CalmanFilter filter;Vector6f initState;initState << observations[0][0], 0, 0, observations[0][1], 0, 0;filter.init(initState);float dt = 0.1;Matrix6f A = filter.getA(dt);Matrix<float, 6, 2> B = filter.getB(dt);Vector2f u;u << 0, 0;std::vector<Vector2f> estimations;for (int i = 0; i < observations.size(); ++i) {if (i >= 50)u[1] = a;filter.forcast(A, B, u);Vector2f d;filter.calibration(observations[i]);Vector2f est = filter.getEstimation();estimations.push_back(est);}for (int i = 0; i < estimations.size(); ++i) {std::cout << i << " est: " << estimations[i] << " real: " << real[i] << " obs: " << observations[i] << std::endl;}
}
相关文章:

卡尔曼滤波
通过 Eigen 矩阵运算实现线性卡尔曼滤波。模拟的是一辆带火箭发动机的汽车,一开始沿着X轴匀速运动,到X轴中间开启火箭发动机匀加速向Y轴起飞。同理可以仿真(x,y,z,yaw,pitch,raw) 6自由度的真实飞行情况 #include <iostream&g…...

不受平台限制,Sketch 网页版震撼登场
Sketch 是一种基于 Mac 的矢量图形编辑器,可用于数字设计。其主要功能包括无损矢量编辑、完美像素精度和数百个插件同步功能,可导出预设和代码。它是目前流行的页面交互协作设计工具。但是 Sketch 最大的缺点是对 Windows/PC 用户不友好。严格来说&#…...

如何使用.pth训练模型
一.使用.pth训练模型的步骤如下: 1.导入必要的库和模型 import torch import torchvision.models as models# 加载预训练模型 model models.resnet50(pretrainedTrue) 2.定义数据集和数据加载器 # 定义数据集和数据加载器 dataset MyDataset() dataloader to…...
C++11线程以及线程同步
C11中提供的线程类std::thread,基于此类创建一个新的线程相对简单,只需要提供线程函数和线程对象即可 一.命名空间 this_thread C11 添加一个关于线程的命名空间std::this_pthread ,此命名空间中提供四个公共的成员函数; 1.1 get_id() 调用命名空间s…...
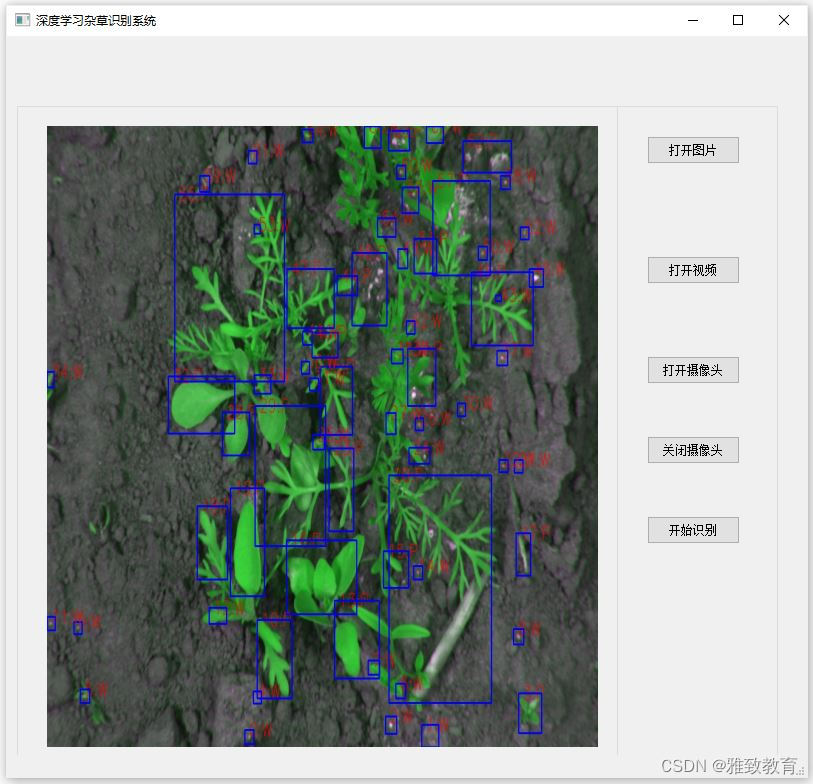
深度学习之基于YoloV3杂草识别系统
欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。 文章目录 一项目简介 二、功能三、系统四. 总结 一项目简介 深度学习在图像识别领域已经取得了显著的成果,其中基于YOLO(You Only Look Once)…...

Linux 命令vim(编辑器)
(一)vim编辑器的介绍 vim是文件编辑器,是vi的升级版本,兼容vi的所有指令,同时做了优化和延伸。vim有多种模式,其中常用的模式有命令模式、插入模式、末行模式:。 (二)vim编辑器基本操作 1 进入vim编辑文件 1 vim …...
轻松配置PPPoE连接:路由器设置和步骤详解
在家庭网络环境中,我们经常使用PPPoE(点对点协议过夜)连接来接入宽带互联网。然而,对于一些没有网络专业知识的人来说,配置PPPoE连接可能会有些困难。在本文中,我将详细介绍如何轻松配置PPPoE连接ÿ…...
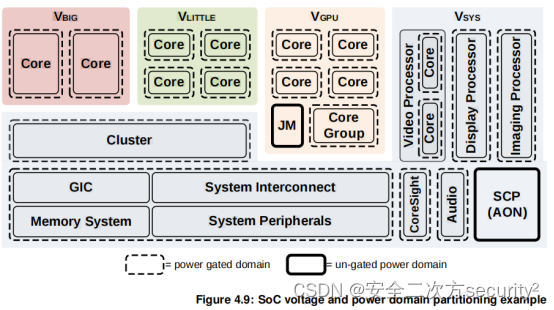
电源控制系统架构(PCSA)之系统分区电源域
目录 4.2 电源域 4.2.1 电源模式 4.2.2 电源域的选择 4.2.3 系统逻辑 4.2.4 Always-On域 4.2.5 处理器Clusters 4.2.6 CoreSight逻辑 4.2.7 图像处理器 4.2.8 显示处理器 4.2.9 其他功能 4.2.10 电源域层次结构要求 4.2.11 SOC域示例 4.2 电源域 电源域在这里被定…...

Linux:docker基础操作(3)
docker的介绍 Linux:Docker的介绍(1)-CSDN博客https://blog.csdn.net/w14768855/article/details/134146721?spm1001.2014.3001.5502 通过yum安装docker Linux:Docker-yum安装(2)-CSDN博客https://blog.…...
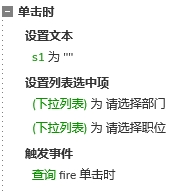
【Axure教程】用中继器制作卡片多条件搜索效果
卡片设计通过提供清晰的信息结构、可视化吸引力、易扩展性和强大的交互性,为用户界面设计带来了许多优势,使得用户能够更轻松地浏览、理解和互动。 那今天就教大家如何用中继器制作卡片的模板,以及完成多条件搜索的效果,我们会以…...
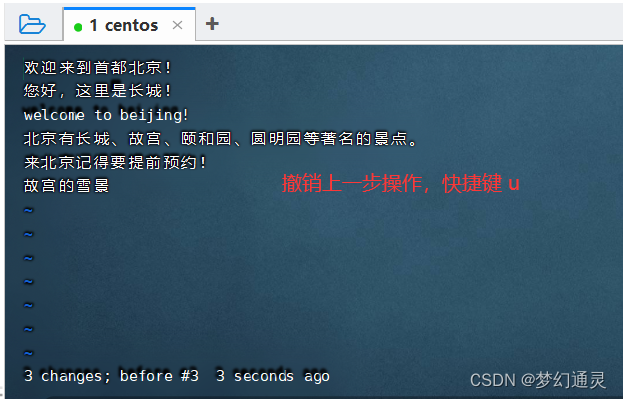
Linux中vi常用命令-批量替换
在日常服务器日志查看中常用到的命令有grep、tail等,有时想查看详细日志,用到vi命令,记录下来,方便查看。 操作文件:test.properites 一、查看与编辑 查看命令:vi 文件名 编辑命令:按键 i&…...

logback-spring.xml的内容格式
目录 一、logback-spring.xml 二、Logback 中的三种日志文件类型 一、logback-spring.xml <?xml version"1.0" encoding"UTF-8"?> <configuration scan"true" scanPeriod"10 seconds" ><!-- <statusListener…...

nodejs+vue+elementui+express青少年编程课程在线考试系统
针对传统线下考试存在的老师阅卷工作量较大,统计成绩数据时间长等问题,实现一套高效、灵活、功能强大的管理系统是非常必要的。该系统可以迅速完成随机组卷,及时阅卷、统计考试成绩排名的效果。该考试系统要求:该系统将采用B/S结构…...
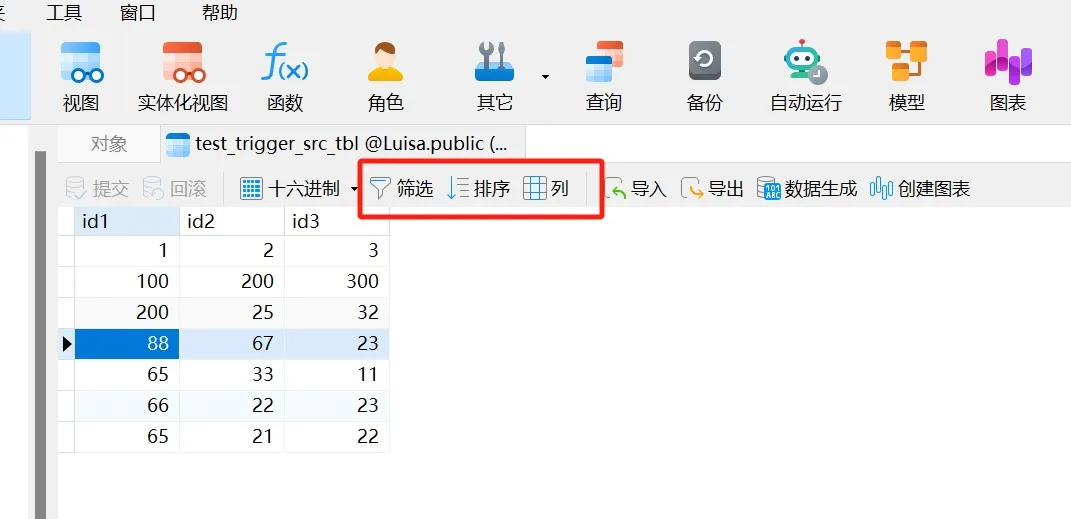
Navicat 技术指引 | GaussDB 数据查看器
Navicat Premium(16.2.8 Windows版或以上) 已支持对GaussDB 主备版的管理和开发功能。它不仅具备轻松、便捷的可视化数据查看和编辑功能,还提供强大的高阶功能(如模型、结构同步、协同合作、数据迁移等),这…...

Docker的registry
简介 地址:https://hub.docker.com/_/registry Dcoker registry是存储Dcoker image的仓库,运行push,pull,search时,是通过Dcoker daemon与docker registry通信。有时候会用Dcoker Hub这样的公共仓库可能不方便&#x…...
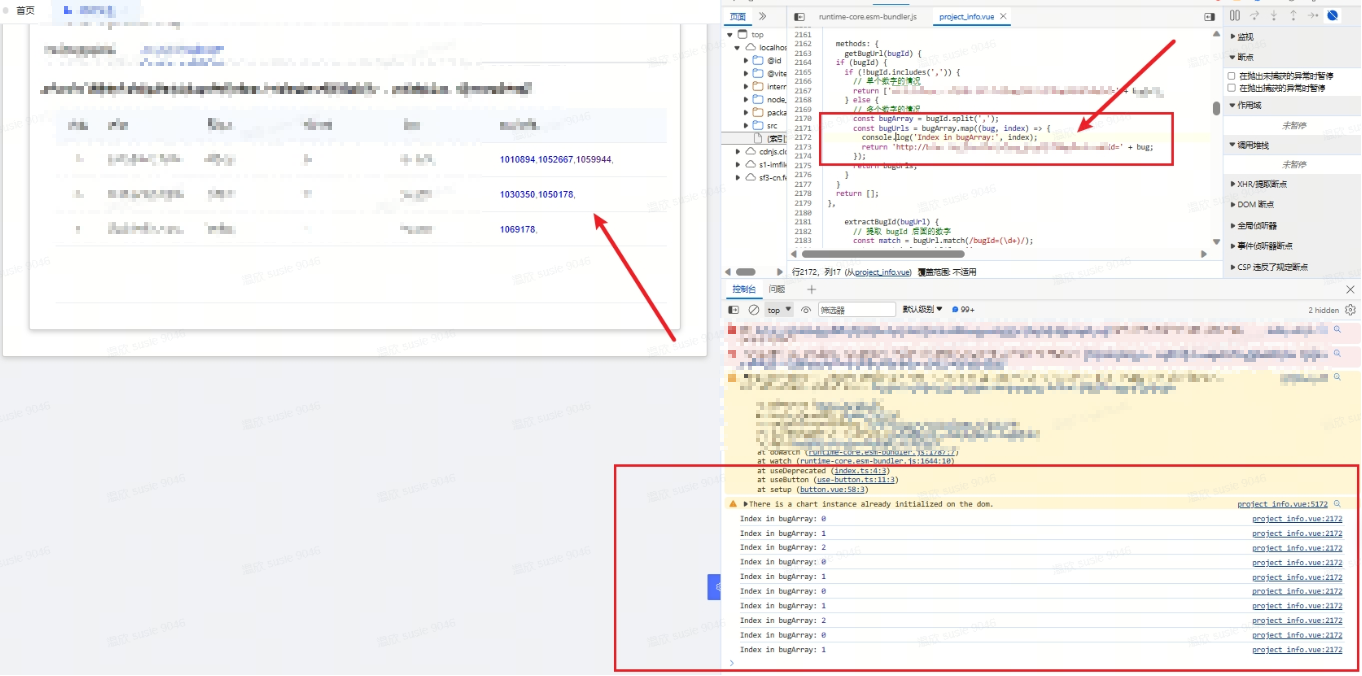
【vue_3】关于超链接的问题
1、需求2、修改前的代码3、修改之后(1)第一次(2)第二次(3)第三次(4)第四次(5)第五次 1、需求 需求:要给没有超链接的列表添加软超链接 2、修改前…...

redis优化秒杀和消息队列
redis优化秒杀 1. 异步秒杀思路1.1 在redis存入库存和订单信息1.2 具体流程图 2. 实现2.1 总结 3. Redis的消息队列3.1 基于list实现消息队列3.2 基于PubSub实现消息队列3.3 基于stream实现消息队列3.3.1 stream的单消费模式3.3.2 stream的消费者组模式 3.4 基于stream消息队列…...

arm-eabi-gcc 和 arm-none-eabi-gcc 都是基于 GCC 的交叉编译器
arm-eabi-gcc 和 arm-none-eabi-gcc 都是基于 GCC 的交叉编译器,用于编译 ARM 架构的嵌入式系统。它们的命名规则如下: arm 表示目标架构是 ARM。eabi 表示嵌入式应用程序二进制接口(Embedded Application Binary Interface)&…...
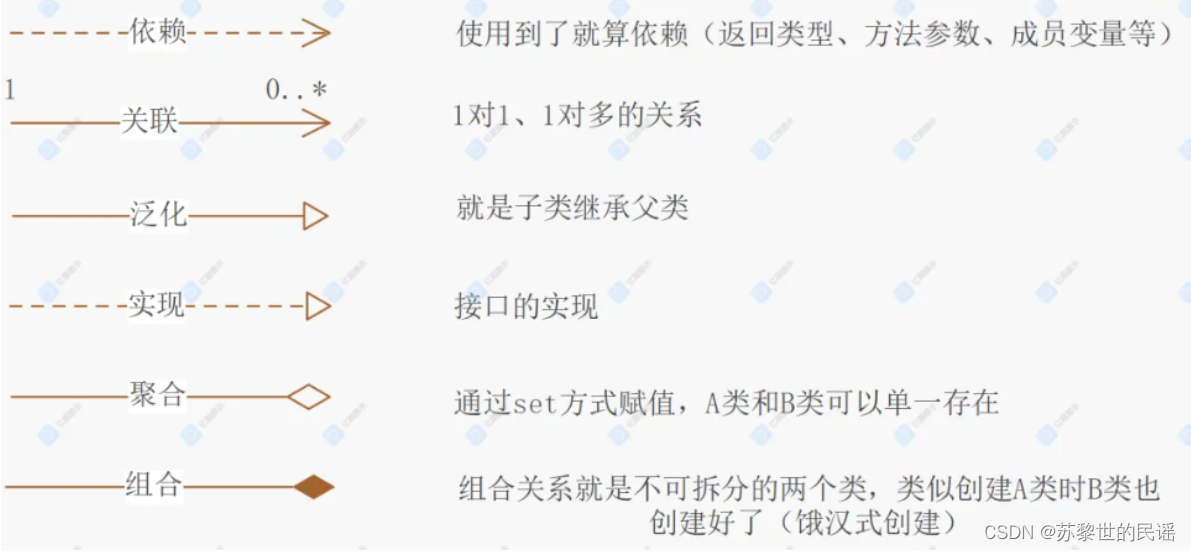
《大话设计模式》(持续更新中)
《大话设计模式》 序 为什么要学设计模式第0章 面向对象基础什么是对象?什么是类?什么是构造方法?什么是重载?属性与字段有什么区别?什么是封装?什么是继承?什么是多态?抽象类的目的…...

人工智能原理复习--绪论
文章目录 人工智能原理概述图灵测试人工智能的研究方法符号主义连接主义行为主义总结 人工智能原理概述 人工智能是计算机科学基础理论研究的重要组成部分 现代人工智能一般认为起源于美国1956你那夏季的达特茅斯会议,在这次会议上,John McCarthy第一次…...

YimMenu技术指南:从环境部署到安全应用的全流程实践
YimMenu技术指南:从环境部署到安全应用的全流程实践 【免费下载链接】YimMenu YimMenu, a GTA V menu protecting against a wide ranges of the public crashes and improving the overall experience. 项目地址: https://gitcode.com/GitHub_Trending/yi/YimMen…...

猫抓cat-catch终极文件命名指南:高效自动化资源管理方案
猫抓cat-catch终极文件命名指南:高效自动化资源管理方案 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 猫抓cat-catch作为一款专业的浏…...

【变分自编码器】突破性优化:sd-vae-ft-mse重构图像生成质量的技术测评
【变分自编码器】突破性优化:sd-vae-ft-mse重构图像生成质量的技术测评 【免费下载链接】sd-vae-ft-mse 项目地址: https://ai.gitcode.com/hf_mirrors/stabilityai/sd-vae-ft-mse 在数字图像生成领域,如何在保持高效计算的同时突破细节还原瓶颈…...

OpenClaw安全指南:Qwen3-14b_int4_awq模型下的权限控制与风险规避
OpenClaw安全指南:Qwen3-14b_int4_awq模型下的权限控制与风险规避 1. 为什么需要关注OpenClaw的安全问题 去年夏天,我在调试一个自动整理照片的OpenClaw任务时,差点酿成大错。当时AI助手误将"删除重复文件"理解成了"删除所有…...

YOLO12镜像详解:支持开机自启,服务异常自动重启
YOLO12镜像详解:支持开机自启,服务异常自动重启 1. YOLO12镜像概述 YOLO12是2025年最新发布的目标检测模型,由美国纽约州立大学布法罗分校和中国科学院大学联合研发。该镜像基于YOLO12模型构建,提供了开箱即用的目标检测服务&am…...

2025届最火的五大AI科研方案解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 减低AIGC检测比率的关键之处在于去除机器生成的那种带有规律性的特征,先…...

如何彻底卸载OneDrive:Windows系统清理专业指南
如何彻底卸载OneDrive:Windows系统清理专业指南 【免费下载链接】OneDrive-Uninstaller Batch script to completely uninstall OneDrive in Windows 10 项目地址: https://gitcode.com/gh_mirrors/on/OneDrive-Uninstaller 一、问题诊断:OneDriv…...

Ai2Psd:跨软件矢量图形无损转换的技术突破
Ai2Psd:跨软件矢量图形无损转换的技术突破 【免费下载链接】ai-to-psd A script for prepare export of vector objects from Adobe Illustrator to Photoshop 项目地址: https://gitcode.com/gh_mirrors/ai/ai-to-psd 在数字设计工作流中,Adobe …...

WorkBuddy 高效全能使用指南:深度解读与专业剖析
摘要WorkBuddy 是腾讯云 CodeBuddy 团队推出的 AI 原生桌面智能体工作台,代表了从“对话式 AI”向“执行式 AI”的范式转移。本报告基于多源资料,从战略定位、技术架构、功能模块、应用场景、使用方法论、生态体系、商业模式及未来演进八个维度进行深度剖…...

NCM格式转换全攻略:3步解锁网易云音乐文件自由播放
NCM格式转换全攻略:3步解锁网易云音乐文件自由播放 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 你是否遇到过下载的网易云音乐NCM文件无法在车载音响、MP3播放器等设备播放的问题?ncmdump作为一款高效的NC…...