高噪点灰度图目标粗定位CoraseLocation
高噪点的灰度图目标粗定位
/*
** @name: CoraseLocation
** @brief: 粗定位
** @param:[in] srcGray 灰度图()
** @param:[in] box 目标尺寸(像素)
** @param:[ou] roi 目标定位结果
** @return: true=成功,false=失败
*/
bool CoraseLocation(cv::Mat& srcGray, cv::Size box, cv::Rect& roi){try{if (srcGray.empty()) return false;if (srcGray.channels() != 1) return false;if (box.width < 4 || box.width >= srcGray.cols) return false;if (box.height < 4 || box.height >= srcGray.rows) return false;//roi = cv::Rect(0, 0, srcGray.cols, srcGray.rows);// STEP01: 计算影像平均灰度与标准差cv::Scalar meanVal, devVal;cv::meanStdDev(srcGray, meanVal, devVal);// STEP02: 计算积分图(寻找目标:亮区或暗区)cv::Mat srcInte;cv::integral(srcGray, srcInte, CV_64F);// STEP03: 寻找亮区和暗区cv::Point ptMin(-1, -1), ptMax(-1, -1);double valMin = DBL_MAX, valMax = DBL_MIN;for (int y = 0; y < srcInte.rows - box.height; y += box.height / 2){for (int x = 0; x < srcInte.cols - box.width; x += box.width / 2){double left_top = srcInte.at<double>(y, x);double left_bottom = srcInte.at<double>(y + box.height, x);double right_top = srcInte.at<double>(y, x + box.width);double right_bottom = srcInte.at<double>(y + box.height, x + box.width);//double valBox = right_bottom - left_bottom - right_top + left_top;if (valMin > valBox){valMin = valBox;ptMin.x = x + 1;ptMin.y = y + 1;}if (valMax < valBox){valMax = valBox;ptMax.x = x + 1;ptMax.y = y + 1;}}}valMin /= box.area();valMax /= box.area();// STEP04: 判断目标是亮区还是暗区,并重新转换为二值图bool isWhiteMark = false;cv::Mat srcBin;if (abs(valMin - meanVal[0]) > abs(valMax - meanVal[0])){// valmin: mark为暗roi = cv::Rect(ptMin.x, ptMin.y, box.width, box.height);isWhiteMark = false;cv::threshold(srcGray, srcBin, valMin - devVal[0], 255, cv::THRESH_BINARY_INV);}else {// valmax: mark为亮roi = cv::Rect(ptMax.x, ptMax.y, box.width, box.height);isWhiteMark = true;cv::threshold(srcGray, srcBin, valMax + devVal[0], 255, cv::THRESH_BINARY);}// STEP05: 根据二值图,调整目标区域std::vector<std::vector<cv::Point>> contours;cv::findContours(srcBin, contours, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_NONE);valMax = DBL_MIN;int idxMax = -1;for (int i = 0; i < contours.size(); ++i){auto area = cv::contourArea(contours[i]);if (valMax < area){valMax = area;idxMax = i;}}if (idxMax < 0){return -1;}// STEP06: 输出拟合后的目标区域roi = cv::boundingRect(contours[idxMax]);return true;}catch (...){}return false;
}
效果:
相关文章:

高噪点灰度图目标粗定位CoraseLocation
高噪点的灰度图目标粗定位 /* ** name: CoraseLocation ** brief: 粗定位 ** param:[in] srcGray 灰度图() ** param:[in] box 目标尺寸(像素) ** param:[ou] roi 目标定位结果 ** return: true成功,false…...
)
Android:Google三方库之Firebase集成详细步骤(二)
Analytics分析 1、将 Firebase 添加到您的 Android 项目(如果尚未添加),并确保在 Firebase 项目中启用了 Google Analytics(分析): 如果您要创建新的 Firebase 项目,请在项目创建过程中启用 G…...

java使用freemarker模板生成html,再生成pdf
1.freemarker模板生成html 添加Maven依赖 在pom.xml文件中添加以下依赖: <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-freemarker</artifactId> </dependency>创建Freemarker…...
图解系列--Web服务器,Http首部
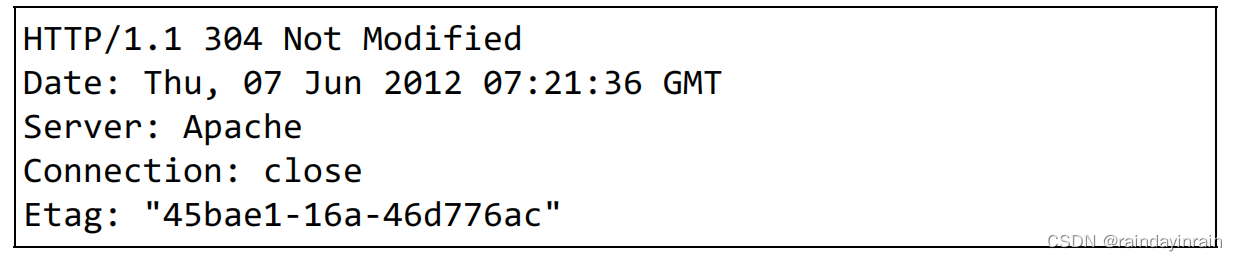
1.用单台虚拟主机实现多个域名 HTTP/1.1 规范允许一台 HTTP 服务器搭建多个 Web 站点。。比如,提供 Web 托管服务(Web Hosting Service)的供应商,可以用一台服务器为多位客户服务,也可以以每位客户持有的域名运行各自不…...
直线(蓝桥杯)
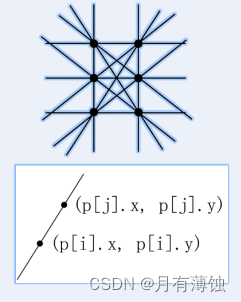
直线 题目描述 本题为填空题,只需要算出结果后,在代码中使用输出语句将所填结果输出即可。 在平面直角坐标系中,两点可以确定一条直线。如果有多点在一条直线上, 那么这些点中任意两点确定的直线是同一条。 给定平面上 2 3 个…...

Android:从源码看FragmentManager如何工作
一个Activity中,在某一个容器中,更换不同的Fragment,从而显示不同的界面,这个场景相信大家已经非常熟悉了,也知道Activity是通过FragmentManager来管理嵌入的Fragments的,所以今天就来看看FragmentManager是…...

LabVIEW通过编程将图形类控件的X轴显示为时间戳
LabVIEW通过编程将图形类控件的X轴显示为时间戳 每个版本的LabVIEW中都有属性节点,可以以编程方式调整X轴和Y轴格式。对于不同版本的LabVIEW,这些属性节点无法在同一个位置找到。请参阅以下部分,了解特定版本LabVIEW的相关属性节点的位置。 …...
Spring Boot进行单元测试,一个思路解决重启低效难题!
所谓单元测试就是对功能最小粒度的测试,落实到JAVA中就是对单个方法的测试。 junit可以完成单个方法的测试,但是对于Spring体系下的web应用的单元测试是无能为力的。因为spring体系下的web应用都采用了MVC三层架构,依托于IOC,层级…...

c/c++ header_only 头文件实现的关键点
header_only 头文件实现的关键点 ------------------------------------------------------------------------- author: hjjdebug date: 2023年 11月 28日 星期二 16:58:38 CST descriptor: header_only 头文件实现的关键点1. 对外声明的函数必需加上inline, 消除连接的歧义…...
:通过docker安装redis)
Linux(CentOS7.5):通过docker安装redis
一、准备配置文件 在宿主机,准备映射配置文件的目录下,运行如下: wget http://download.redis.io/redis-stable/redis.conf二、安装 docker run \ --restartalways \ --log-opt max-size100m \ --log-opt max-file2 \ -p 6380:6379 \ -v /opt…...

唯创知音WT588F02B-8S语音芯片:灵活更换语音内容,降低开发成本与备货压力
在电子产品的开发阶段,语音芯片的选择与使用对于产品的功能、成本和上市时间都有着重要影响。唯创知音的WT588F02B-8S语音芯片以其独特的优势,成为工程师们的理想选择,尤其在样品阶段,它为工程师提供了自行更换语音内容的便利&…...
git的创建以及使用
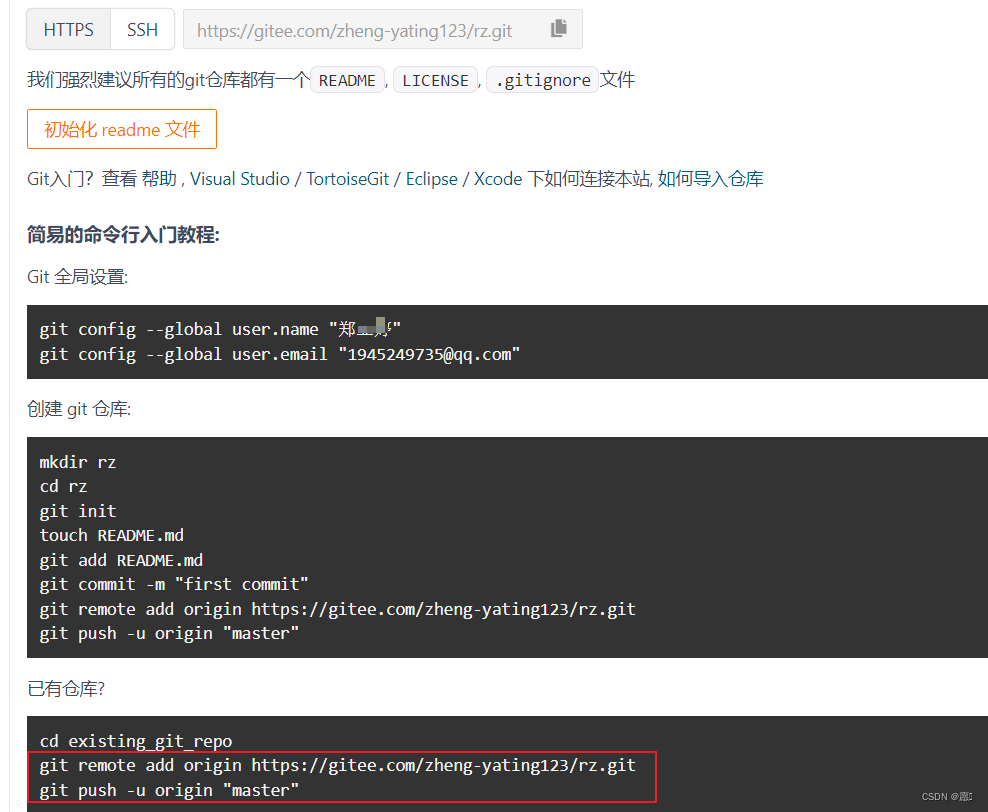
1、上传本地仓库 首先确定项目根目录中没有.git文件,有的话就删了,没有就下一步。在终端中输入git init命令。注意必须是根目录! 将代码存到暂存区 将代码保存到本地仓库 2、创建git仓库 仓库名称和路径(name)随便写…...

面试笔记--Linux常用命令
文件和目录操作: ls: 列出目录内容 例子:ls -l - 列出详细信息,包括权限、所有者等 cd: 切换目录 例子:cd Documents - 进入 “Documents” 目录 pwd: 显示当前工作目录 例子:pwd - 显示当前工作目录的路径 cp: 复制文…...

【小黑嵌入式系统第十课】μC/OS-III概况——实时操作系统的特点、基本概念(内核任务中断)、与硬件的关系实现
文章目录 一、为什么要学习μC/OS-III二、嵌入式操作系统的发展历史三、实时操作系统的特点四、基本概念1. 前后台系统2. 操作系统3. 实时操作系统(RTOS)4. 内核5. 任务6. 任务优先级7. 任务切换8. 调度9. 非抢占式(合作式)内核10…...

在easyswoole 中,配置文件如何加载外部配置
在一个项目中 目录结构是这样的 网站的公共配置,包括一些数据库连接配置,redis连接配置 /web/config/redis_config.php/web/config/mysql_config.php 下面是Easyswoole 项目目录 所有的配置均放在ES项目中的Config目录中 文件名且采用大驼峰命名。如…...

小程序微信支付API?以及参数有哪些
微信小程序支付API有两个,分别是 wx.chooseWXPay 和 wx.pay。 wx.chooseWXPay 是用于唤起微信支付的API,它支持扫码支付、JSAPI支付、APP支付等。它返回一个Promise对象,可以在then方法中处理支付结果。 wx.pay 是用于发起微信支付的API&am…...
【算法】一个简单的整数问题(树状数组、差分)
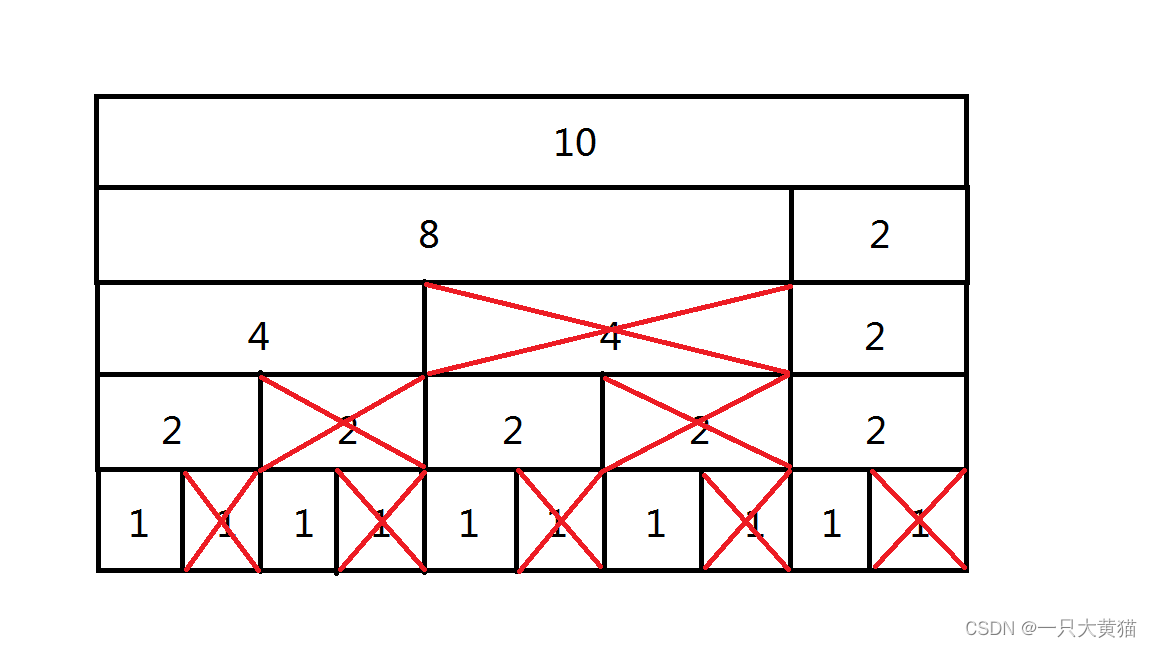
题目 给定长度为 N 的数列 A,然后输入 M 行操作指令。 第一类指令形如 C l r d,表示把数列中第 l∼r 个数都加 d。 第二类指令形如 Q x,表示询问数列中第 x 个数的值。 对于每个询问,输出一个整数表示答案。 输入格式 第一行…...
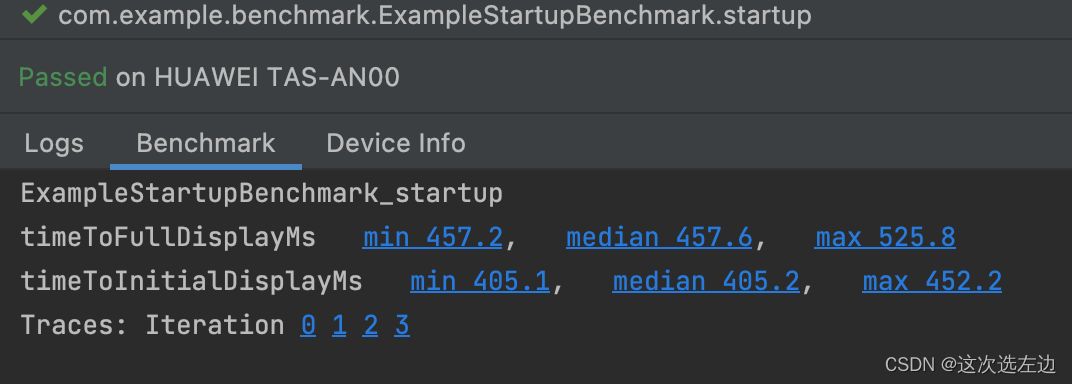
Android flutter项目 启动优化实战(二)利用 App Startup 优化项目和使用flutterboost中的问题解决
背景 书接上回: Android flutter项目 启动优化实战(一)使用benchmark分析项目 已经分析出了问题: 1.缩短总时长(解决黑屏问题、懒启动、优化流程)、2.优化启动项(使用App Startup)、3.提升用…...

Java---权限修饰符、final、static
文章目录 1. 权限修饰符2. final(最终态)3. static(静态) 1. 权限修饰符 修饰符同一个类中同一个包中的子类和无关类不同包的子类不同包的无关类private√默认√√protected√√√public√√√√ 2. final(最终态) 1. final关键字是最终的意思,可以修饰成员方法、…...

unity实时保存对象的位姿,重新运行程序时用最后保存的数据给物体赋值
using UnityEngine; using System.IO; // using System.Xml.Serialization; public class SaveCoordinates : MonoBehaviour {public GameObject MainObject;//读取坐标private float x;private float y;private float z;private Quaternion quaternion;private void Start(){/…...
)
蓝牙抓包不求人:从HCI日志里‘挖’出Link Key的两种实用方法(附安卓路径)
蓝牙安全逆向实战:从HCI日志中提取Link Key的深度解析在蓝牙协议安全研究领域,Link Key作为设备配对认证的核心凭证,其获取方式一直是逆向工程师关注的焦点。许多安全审计场景下,我们往往只能获得加密后的HCI通信日志,…...
—东方仙盟)
酒店门锁V10SDK接口说明-幽冥大陆(一百23)—东方仙盟
相关文件系统环境C# :NET.20,NET3.5,NET4,NET4.5,NET 5.0C:VS2005,VS2012,VS2015操作系统:未来之窗VOSWEB:CHROME43核心代码完整代码using System; using System.Collections.Generic; using System.Text; using System.Collections.Specialized;using System.Windo…...

③ AI副业第一步:如何找到适合自己的AI赚钱赛道
③ AI副业第一步:如何找到适合自己的AI赚钱赛道选对赛道,努力才有意义。选错赛道,越努力离钱越远。前言:为什么大多数人AI副业做不起来? 我观察了100想做AI副业的人,失败的原因高度一致: 失败路…...

Hitboxer:开源SOCD清理工具,3分钟提升游戏操作精准度
Hitboxer:开源SOCD清理工具,3分钟提升游戏操作精准度 【免费下载链接】socd Key remapper for epic gamers 项目地址: https://gitcode.com/gh_mirrors/so/socd 你是否在激烈的游戏对抗中经历过这样的挫败:同时按下左右方向键时角色卡…...

如何快速掌握开源UE资产编辑器:UAssetGUI完整配置与实战指南
如何快速掌握开源UE资产编辑器:UAssetGUI完整配置与实战指南 【免费下载链接】UAssetGUI A tool designed for low-level examination and modification of Unreal Engine game assets by hand. 项目地址: https://gitcode.com/gh_mirrors/ua/UAssetGUI UAss…...

13456
12356...

6款高效降AI率工具 改写实力出众
写论文时反复检测出的AI痕迹总让你提心吊胆?别担心,这里整理了6款真正好用的论文降AI率工具,堪称应对AI生成特征的“得力助手”。它们能有效识别并消除AI生成的痕迹,改写能力出众,帮你快速降低查重率,顺利通…...

FM3773 低功耗离线式恒流/恒压 PSR 控制器
概述 FM3773 是一种高性能的交流/直流用于电池充电器和适配器的电源控制器,内置 850V 功率三极管。该设备采用脉冲频率调制(PFM)的方法来建立非连续导通模式(DCM)反激式电源。 FM3773 提供精确的恒定电压,恒…...

HarmonyOS 6学习:解决图片放大后无法移动至边缘的matrix4矩阵变换技巧
从"卡在中间"到"自由拖拽":一次完整的图片缩放平移边界问题攻关在HarmonyOS 6应用开发中,我最近遇到了一个看似简单却让人头疼的图片查看器问题:用户双指放大图片后,想要拖动查看边缘细节,却发现图…...

保姆级教程:在Windows 10上用QEMU+Kylin搭建可内外网访问的完整开发环境
在Windows 10上构建QEMUKylin全功能开发环境的终极指南当开发者需要在本地快速搭建一个隔离的国产操作系统开发环境时,QEMU虚拟化方案配合银河麒麟系统能提供高度灵活的沙箱体验。本文将手把手带你完成从零配置到内外网联通的完整工作流,涵盖虚拟化环境部…...