STM32之定时器--超声波测距
1、模块介绍
型号:HC-SR04

超声波测距模块是用来测量距离的一种产品,通过发送和收超声波,利用时间差和声音传播速度, 计算出模块到前方障碍物的距离。
2、超声波模块的使用方法
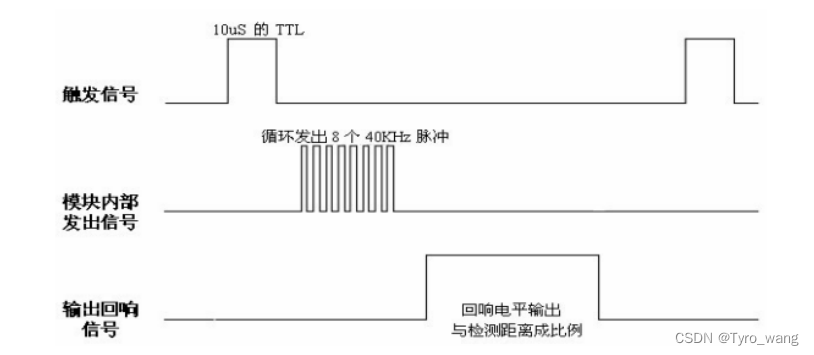
- 怎么让它发送波
Trig ,给Trig端口至少10us的高电平
- 怎么知道它开始发了
Echo信号,由低电平跳转到高电平,表示开始发送波
- 怎么知道接收了返回波
Echo,由高电平跳转回低电平,表示波回来了
- 怎么算时间
Echo引脚维持高电平的时间!
波发出去的那一下,开始启动定时器
波回来的拿一下,我们开始停止定时器,计算出中间经过多少时间
- 怎么算距离
距离 = 速度 (340m/s)* 时间/2
3、 超声波时序图
4、编程实现
需求:使用超声波测距,当手离传感器距离小于5cm时,LED1点亮,否则保持不亮状态。
codeMX配置
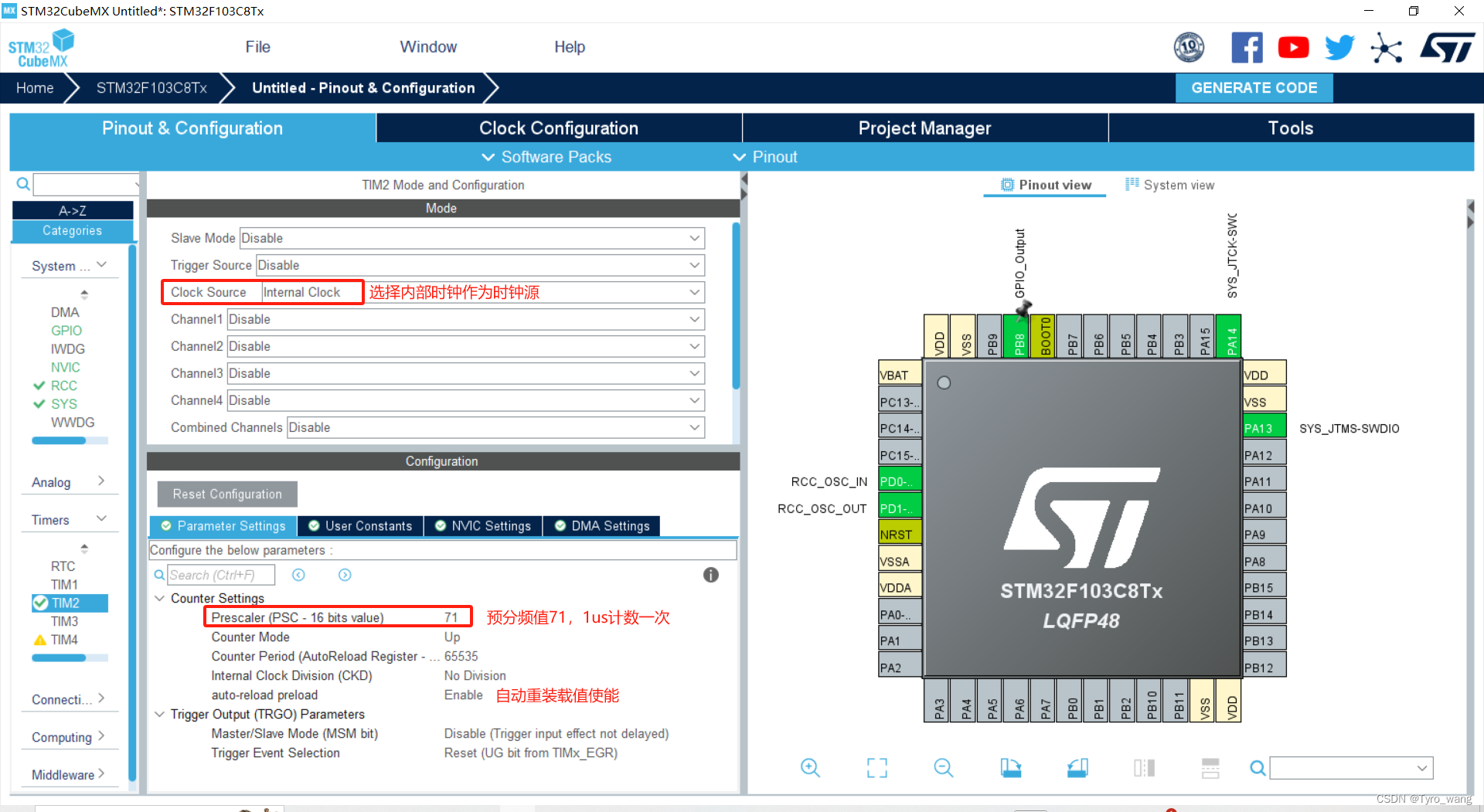
定时器配置:使用 TIM2 ,只用作计数功能,不用作定时。 将 PSC 配置为71,则计数 1 次代表 1us 。
这里因为涉及到us级的延时,而我们的HAL_Delay()延迟函数时ms级别的所以在这里用不了。需要我们使用定时器编写一个us级的延时函数
使用到的HAL库函数
1.启用TIM外设(启动定时器计数)
__HAL_TIM_ENABLE(__HANDLE__)
参数:定时器的句柄
2.在运行时设置TIM计数器寄存器值(设置计数器的值)
#define __HAL_TIM_SetCounter __HAL_TIM_SET_COUNTER
#define __HAL_TIM_SET_COUNTER(__HANDLE__, __COUNTER__)
参数1:定时器的句柄
参数2:指定计数器寄存器的新值
3.在运行时获取TIM计数器寄存器值
#define __HAL_TIM_GetCounter __HAL_TIM_GET_COUNTER
#define __HAL_TIM_GET_COUNTER(__HANDLE__)
参数:定时器的句柄
返回值:计时器计数器寄存器的值 (TIMx_CNT)
4.禁用TIM外设(关闭定时器计数)
#define __HAL_TIM_DISABLE(__HANDLE__)
参数:定时器的句柄
5.启动TIM Base生成(启动定时器)
HAL_StatusTypeDef HAL_TIM_Base_Start(TIM_HandleTypeDef *htim)
参数:定时器的句柄
6.停止生成TIM Base。(停止定时器)
HAL_StatusTypeDef HAL_TIM_Base_Stop(TIM_HandleTypeDef *htim)
参数:定时器的句柄
__HAL_TIM_ENABLE(&htim2)与 HAL_TIM_Base_Start(&htim2)两个库函数有什么区别
代码实现
延时函数代码:
//使用TIM2来做us级延时函数
void TIM2_Delay_us(uint16_t n_us)
{/* 使能定时器2计数 */__HAL_TIM_ENABLE(&htim2);__HAL_TIM_SetCounter(&htim2, 0);while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );/* 关闭定时器2计数 */__HAL_TIM_DISABLE(&htim2);
}main函数里面的代码
while (1){//1. Trig ,给Trig端口至少10us的高电平HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET);TIM2_Delay_us(20);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);//2. echo由低电平跳转到高电平,表示开始发送波while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_5) == GPIO_PIN_RESET);//波发出去的那一下,开始启动定时器HAL_TIM_Base_Start(&htim2);__HAL_TIM_SetCounter(&htim2,0);//测量之前先把次数置零//3. 由高电平跳转回低电平,表示波回来了while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_5) == GPIO_PIN_SET);//波回来的那一下,我们开始停止定时器HAL_TIM_Base_Stop(&htim2);//4. 计算出中间经过多少时间count = __HAL_TIM_GetCounter(&htim2);//获取次数dis = (0.017 * count) / 2;//5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us)if(dis < 10){HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);HAL_Delay(1000);}else{HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET);}//每500毫秒测试一次距离HAL_Delay(500);}相关文章:
STM32之定时器--超声波测距
1、模块介绍 型号:HC-SR04 超声波测距模块是用来测量距离的一种产品,通过发送和收超声波,利用时间差和声音传播速度, 计算出模块到前方障碍物的距离。 2、超声波模块的使用方法 怎么让它发送波 Trig ,给Trig端口至…...
微信小程序 老年人心血管健康知识科普系统
本系统的功能有管理员:个人中心,用户管理,热点信息管理,疾病管理,疾病类型管理,治疗管理,治疗类型管理,护理管理,护理类型管理,科普管理,科普类型…...

influxdb2.x安装配置指南
influxdb的教程已经是很清楚了,但没有中文版翻译,以下是个人安装配置总结 如果机器上只需要一个influxdb实例,或docker安装,直接yum install 就可以了,或者采用离线安装: sudo yum localinstall influxdb…...

android APP使用指定网络上网的原理
【精选】Android app 指定网络发送数据包的实现与原理分析_bindprocesstonetwork-CSDN博客 补充: frameworks/base/core/java/android/net/ConnectivityManager.java 函数: bindProcessToNetwork 调用到了 NetworkUtils.bindProcessToNetwork 但是N…...
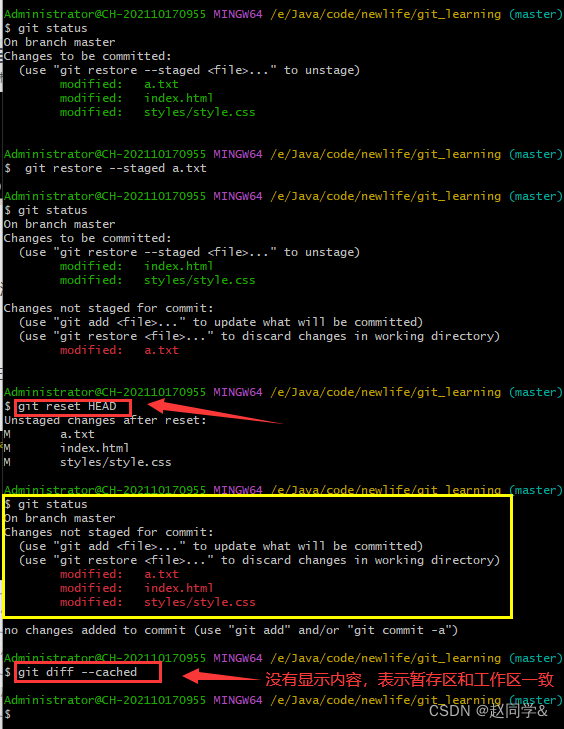
git-2
1.分离头指针情况下的注意事项 分离头指针指的是变更没有基于某个branch去做,所以当进行分支切换的时候,在分离头指针上产生的commit,很可能会被git当作垃圾清理掉,如果你认为是重要的内容,切记需要绑定分支 2.进一步…...
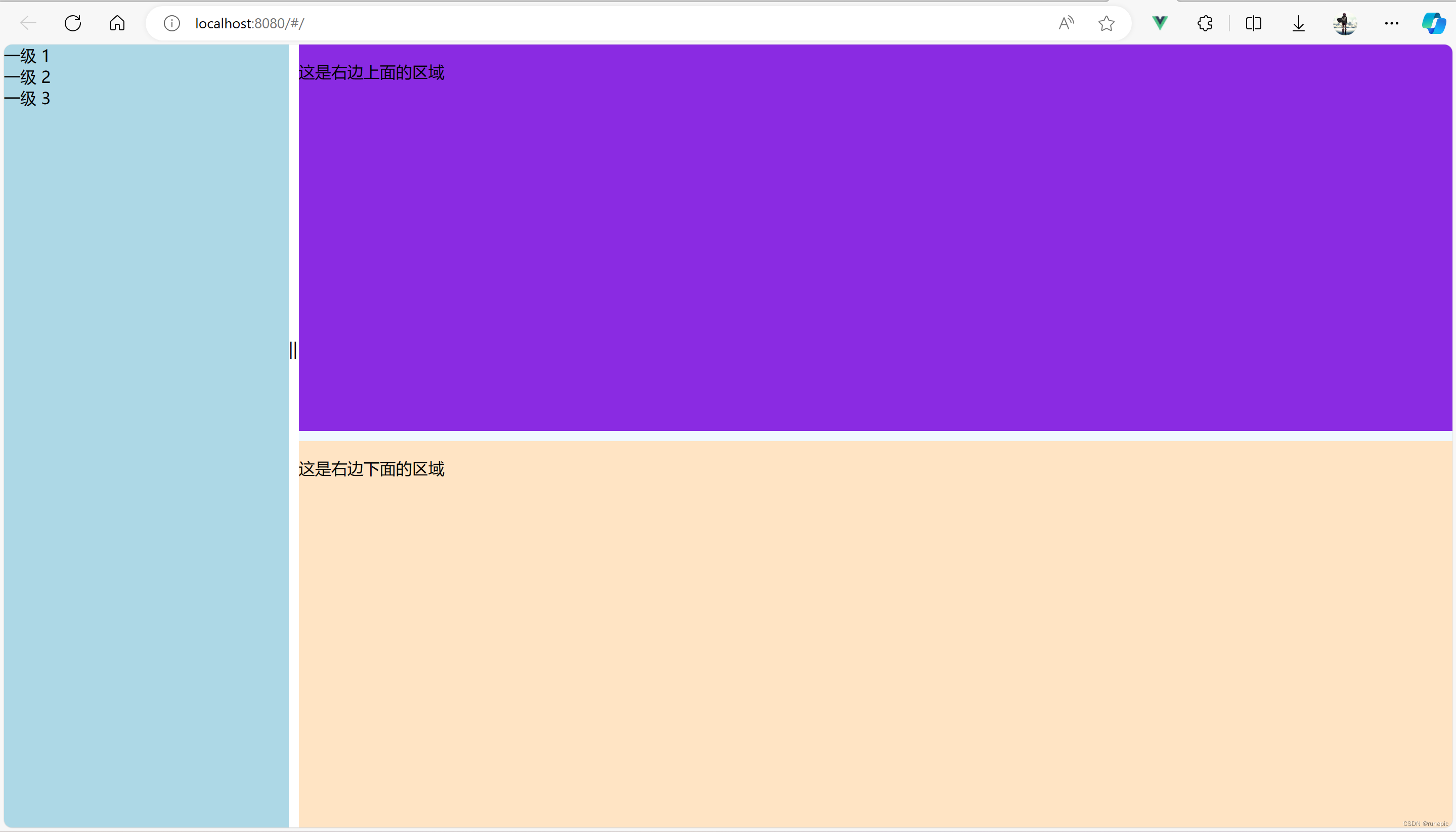
Vue实现可拖拽边界布局
Vue实现可拖拽边界布局 在前端开发中,有时需要实现一种可拖拽边界的布局,通过拖动分隔线来调整不同区域大小。例如,下图是一个典型的可拖拽边界布局,它由左右两个区域组成,左边是一个树形菜单,右边是一个上…...
Day41力扣打卡
打卡记录 第 N 位数字(找规律) 链接 class Solution:def findNthDigit(self, n: int) -> int:count, digit, start 9, 1, 1while n > count:n - countdigit 1start * 10count start * 9 * digitnum start (n - 1) // digitreturn int(str(n…...

SpringBoot项目发送邮件
📑前言 本文主要是【SpringBoot】——SpringBoot项目发送邮件的文章,如果有什么需要改进的地方还请大佬指出⛺️ 🎬作者简介:大家好,我是听风与他🥇 ☁️博客首页:CSDN主页听风与他 dz…...
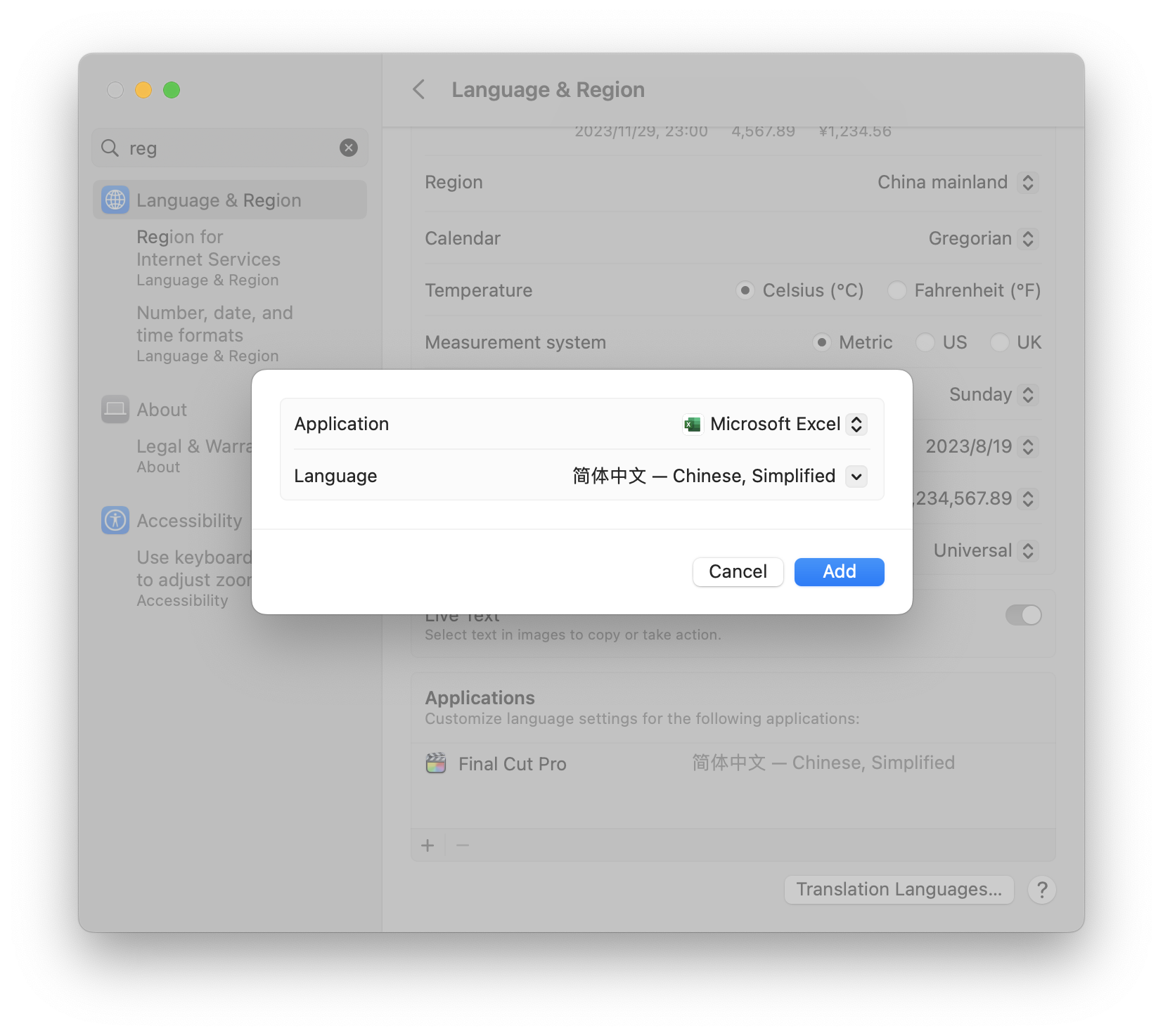
Mac单独修改应用语言
方法1: 方法2: defaults write com.microsoft.Excel AppleLanguages ("zh-cn") defaults write com.microsoft.Word AppleLanguages ("zh-cn")参考:https://www.zhihu.com/question/24976020...

Unity 通过代码控制Texture进行缩放
在实际应用开发中,有时候需要通过代码对Texture进行缩放。 有两个方法,一个是通过控制宽高进行缩放,另一个是通过比例值进行等比例缩放。 1、控制宽高的方法: /// <summary>/// 纹理缩放方法一,指定宽高/// &…...
)
C语言:输入3个整数,按由小到大的顺序输出(指针)
分析: 定义三个整型变量 a、b、c,和三个指向整型变量的指针变量 i、j、k。然后使用 scanf 函数从标准输入(键盘)中读取输入的三个整数,并将它们存储到 a、b、c 中。注意,使用 &a、&b、&c 进行赋…...

C# 模拟鼠标操作工具类
写在前面 用WinForm做RPA项目时经常需要模拟鼠标操作,通过调用Windows Api 可以实现控制鼠标的移动、点击以及滚轮滚动,做到跟人工一样的操作。 代码实现 public static class MouseKeyController{[DllImport("user32")]private static exte…...

content_script.js、background.js和popup.js之间的通讯
1. content_script.js 和 background.js 之间的通信: 使用 chrome.runtime.sendMessage 发送消息,然后在 background.js 中使用 chrome.runtime.onMessage 监听消息并作出相应处理。使用 chrome.extension.sendMessage 发送消息,然后在 back…...

python的requests请求参数带files
踩坑接口请求参数含文件 requests接口请求既有file,也有json。划重点params requests 官网地址 https://requests.readthedocs.io/en/stable/user/quickstart/#post-a-multipart-encoded-file 接口请求既有file,也有json。划重点params import reques…...
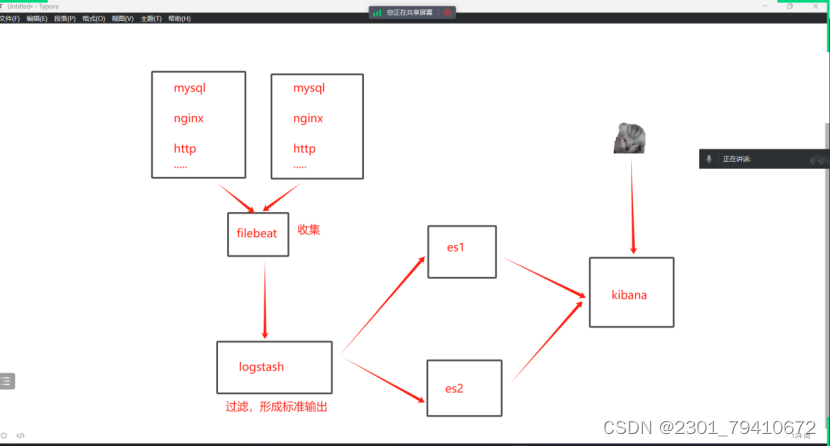
Elk:filebeat 日志收集工具和logstash
Elk:filebeat 日志收集工具和logstash Filebeat是一个轻量级的日志手机工具,所使用的系统资源比logstash部署和启动时使用的资源要小得多 Filebeat可以在非java环境使用,他可以代理logstash在非java环境上收集日志 缺点 Filebeat无法实现数据的过滤,一般是结合l…...
[设计模式] 常见的设计模式
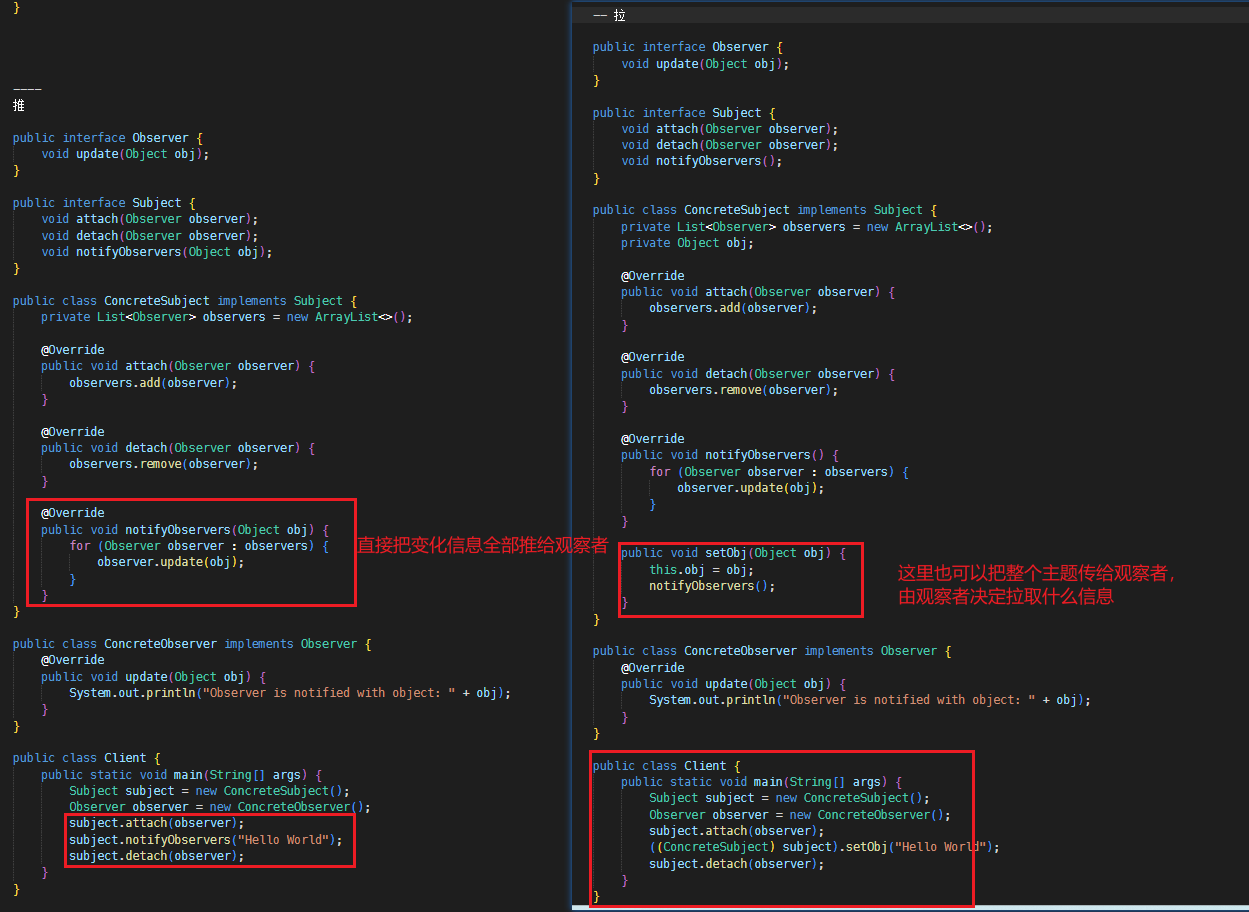
文章目录 设计模式的 6 大设计原则设计模式的三大分类常见的设计模式有哪几种1. 单例模式:保证一个类仅有一个实例,并提供一个访问它的全局访问点。(连接池)1. 饿汉式2. 懒汉式3. 双重检测 2. 工厂模式3. 观察者模式● 推模型● 拉…...
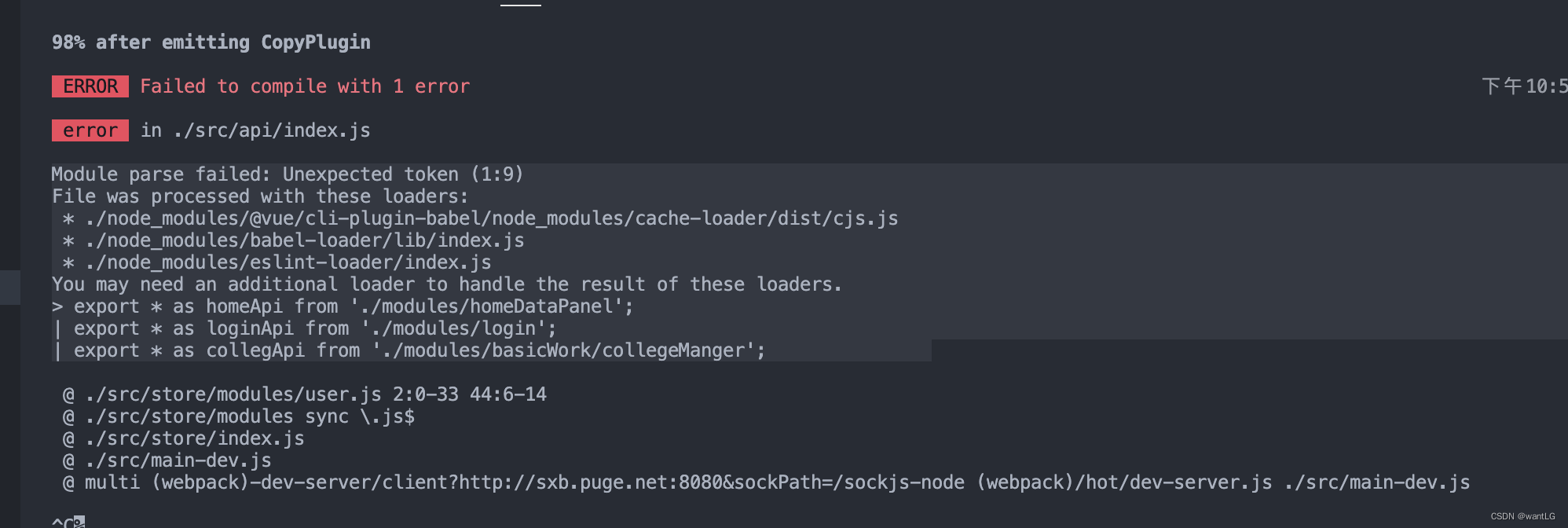
报错解决:You may need an additional loader to handle the result of these loaders.
报错信息如下 vue 项目 Module parse failed: Unexpected token (1:9) File was processed with these loaders:* ./node_modules/vue/cli-plugin-babel/node_modules/cache-loader/dist/cjs.js* ./node_modules/babel-loader/lib/index.js* ./node_modules/eslint-loader/in…...
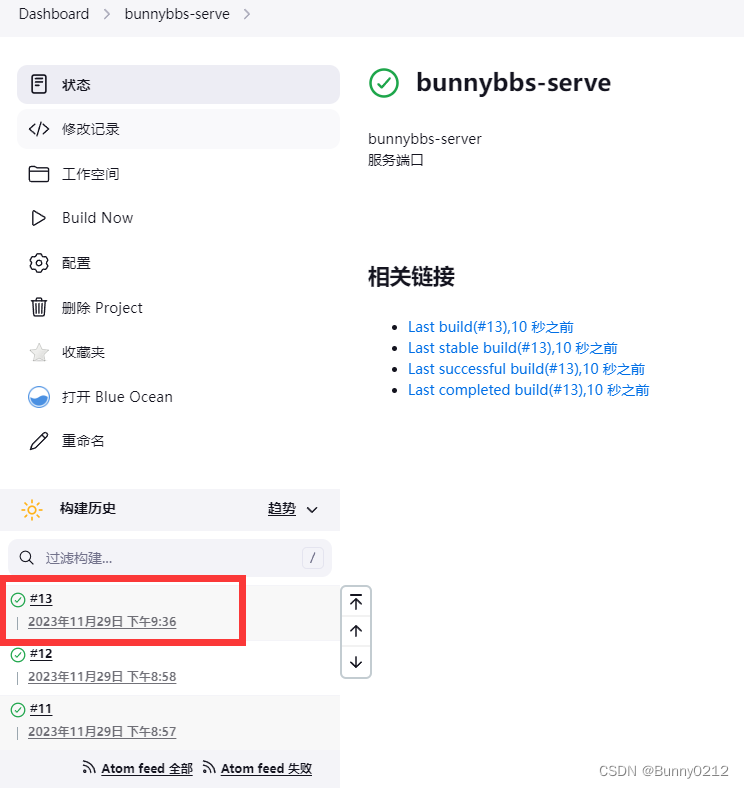
配置自动化部署Jenkins和Gitea
配置自动化部署 这里使用的是JenkinsGitea 如果不知道怎么安装Jenkins和Gitea可以参考下面文章 https://blog.csdn.net/weixin_46533577/article/details/134644144 我的另一篇文章 介绍 前端 先说下自己的情况,因为自己服务器原因,使用的服务器内…...

VSCODE+QEMU+WSL调试RISCV代码(SBI、kernel)
前言 最近在对RISC-V架构比较感兴趣,正好手头有《RISC-V体系结构编程与实践》的书籍,就打算跟随笨叔将这块的知识学习起来,最开始当然是需要搭建一个基础的实验平台,本来笨叔是贴心的提供了VMare的环境,奈何天生叛逆的…...

二叉树(判断是否为对称二叉树)
题目(力扣): 观察题目,只需判断该二叉树是否对称。 判断二叉树是否对称,就可以换位去判断该二叉树的左子树和右子树是否对称。 这时就可以写一个辅助函数来方便判断。 该函数是判断两颗树是否镜像对称,这…...

为什么92%的Sora 2初学者卡在第4步?——帧一致性崩塌诊断工具包+时间轴锚点校准法
更多请点击: https://kaifayun.com 第一章:Sora 2视频生成的核心原理与环境准备 Sora 2并非OpenAI官方发布的模型,而是社区基于Sora技术理念构建的开源复现与增强框架,其核心依托于时空联合建模的扩散变换器(Spacetim…...

抖音数字资产管理方法论:构建个人内容沉淀系统的技术实践
抖音数字资产管理方法论:构建个人内容沉淀系统的技术实践 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback su…...
)
手把手教你为WCH CH582移植CherryUSB主机栈(基于RT-Thread,含中断优化)
基于RT-Thread的WCH CH582 USB主机协议栈深度移植指南在嵌入式开发领域,USB主机功能的实现往往意味着设备能够直接连接各类USB外设,从简单的键盘鼠标到复杂的存储设备。对于使用WCH CH582这类RISC-V内核MCU的开发者而言,原厂SDK提供的USB主机…...

新手村任务:成为一个架构师需要哪些装备?
新手村任务:成为一个架构师需要哪些装备? 一、前言 如果你刚入行不久,想成为一名架构师,那这篇文章就是为你写的。 我们把成为架构师比作一个RPG游戏,你是主角,需要收集各种装备、刷经验、升级技能。 新手村的第一个任务就是:了解你需要哪些装备。 二、架构师技能树…...

收藏必看|2026 版大厂 AI 岗位薪资曝光!普通程序员转型大模型最全指南
深夜收到大厂 HR 好友发来的内部资料,再三叮嘱切勿对外泄露。如今网络信息传播速度极快,这份 2026 年企业 AI 岗真实薪资内幕,也值得给广大程序员、零基础入行小白参考借鉴。 翻看完整薪资台账后,真切感受到当下大模型赛道的薪资差…...

对比 Token Plan 与按量计费在 Taotoken 平台上的成本体感差异
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比 Token Plan 与按量计费在 Taotoken 平台上的成本体感差异 对于个人开发者或项目管理者而言,在接入大模型服务时&a…...

MBTI性格测试
简介 MBTI(Myers‑Briggs Type Indicator,迈尔斯‑布里格斯类型指标)是基于荣格心理类型理论发展出的性格类型工具,由凯瑟琳库克布里格斯及其女儿伊莎贝尔布里格斯迈尔斯创建。它通过四对偏好维度将个体的认知与行为倾向归纳为 16…...

MobX社区资源大全:10个必备工具、插件和扩展库推荐 [特殊字符]
MobX社区资源大全:10个必备工具、插件和扩展库推荐 🚀 【免费下载链接】MobX-Docs-CN MobX 中文文档 项目地址: https://gitcode.com/gh_mirrors/mo/MobX-Docs-CN MobX作为一个简单、可扩展的状态管理库,已经成为React开发者不可或缺的…...

Taotoken的审计日志功能为企业API安全与合规管理提供支持
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的审计日志功能为企业API安全与合规管理提供支持 当企业决定将大模型能力集成到内部业务流程中时,IT管理员和安…...

Unity项目DrawCall降不下来?试试用Mesh Baker合并贴图集,保姆级图文教程
Unity性能优化实战:用Mesh Baker合并贴图集降低DrawCall全流程解析当你的Unity项目帧率开始卡顿,Profiler里DrawCall数字居高不下时,合并贴图集往往是解决问题的关键一步。本文将以一个实际项目为例,带你从零开始使用Mesh Baker的…...