【RT-DETR改进】SIoU、GIoU、CIoU、DIoU、AlphaIoU等二十余种损失函数

一、本文介绍
这篇文章介绍了RT-DETR的重大改进,特别是在损失函数方面的创新。它不仅包括了多种IoU损失函数的改进和变体,如SIoU、WIoU、GIoU、DIoU、EIOU、CIoU,还融合了“Alpha”思想,创造了一系列新的损失函数。这些组合形式的损失函数超过了二十余种,每种都针对特定的目标检测挑战进行优化。文章会详细探讨这些损失函数如何提高RT-DETR在各种检测任务中的性能,包括提升精度、加快收敛速度和增强模型对复杂场景的适应性。本文章主要是为了发最近新出的Inner思想改进的各种EIoU的文章服务,其中我经过实验在绝大多数下的效果都要比本文中提到的各种损失效果要好。
RT-DETR改进专栏:RT-DETR专栏——持续复现各种顶会内容——论文收割机
InnerIoU: RT-DETR改进 | 2023小目标改进 | InnerEIoU、InnerSIoU、InnerWIoU、InnerDIoU等二十余种损失函数
目录
一、本文介绍
二、各种损失函数的基本原理
2.1 交集面积和并集面积
2.2 IoU
2.3 SIoU
2.4 WioU
2.5 GIoU
2.6 DIoU
2.7 EIoU
2.8 CIoU
三、EIoU、SIoU、EIoU、WIoU等损失函数代码块
四、添加EIoU、SIoU、EIoU、AlphaIoU等损失函数到模型中
7.1 修改一
7.2 修改二
五、总结
二、各种损失函数的基本原理
2.1 交集面积和并集面积
在理解各种损失函数之前我们需要先来理解一下交集面积和并集面积,在数学中我们都学习过集合的概念,这里的交集和并集的概念和数学集合中的含义是一样的。

2.2 IoU
论文地址:IoU Loss for 2D/3D Object Detectio
适用场景:普通的IoU并没有特定的适用场景
概念: 测量预测边界框和真实边界框之间的重叠度(最基本的边界框损失函数,后面的都是居于其进行计算)。

2.3 SIoU
论文地址:SIoU: More Powerful Learning for Bounding Box Regression
适用场景:适用于需要高精度边界框对齐的场景,如精细的物体检测和小目标检测。
概念: SIoU损失通过融入角度考虑和规模敏感性,引入了一种更为复杂的边界框回归方法,解决了以往损失函数的局限性,SIoU损失函数包含四个组成部分:角度损失、距离损失、形状损失和第四个未指定的组成部分。通过整合这些方面,从而实现更好的训练速度和预测准确性。

2.4 WioU
论文地址:WIoU: Bounding Box Regression Loss with Dynamic Focusing Mechanism
适用场景:适用于需要动态调整损失焦点的情况,如不均匀分布的目标或不同尺度的目标检测。
概念:引入动态聚焦机制的IoU变体,旨在改善边界框回归损失。

2.5 GIoU
论文地址:GIoU: A Metric and A Loss for Bounding Box Regression
适用场景:适合处理有重叠和非重叠区域的复杂场景,如拥挤场景的目标检测。
概念: 在IoU的基础上考虑非重叠区域,以更全面评估边界框

2.6 DIoU
论文地址:DIoU: Faster and Better Learning for Bounding Box Regression
适用场景:适用于需要快速收敛和精确定位的任务,特别是在边界框定位精度至关重要的场景。
概念:结合边界框中心点之间的距离和重叠区域。

2.7 EIoU
论文地址:EIoU:Loss for Accurate Bounding Box Regression
适用场景:可用于需要进一步优化边界框对齐和形状相似性的高级场景。
概念:EIoU损失函数的核心思想在于提高边界框回归的准确性和效率。它通过以下几个方面来优化目标检测:
1. 增加中心点距离损失:通过最小化预测框和真实框中心点之间的距离,提高边界框的定位准确性。
2. 考虑尺寸差异:通过惩罚宽度和高度的差异,EIoU确保预测框在形状上更接近真实框。
3. 结合最小封闭框尺寸:将损失函数与包含预测框和真实框的最小封闭框的尺寸相结合,从而使得损失更加敏感于对象的尺寸和位置。
EIoU损失函数在传统IoU基础上增加了这些考量,以期在各种尺度上都能获得更精确的目标定位,尤其是在物体大小和形状变化较大的场景中。

2.8 CIoU
论文地址:CIoU:Enhancing Geometric Factors in Model Learning
适用场景:适合需要综合考虑重叠区域、形状和中心点位置的场景,如复杂背景或多目标跟踪。
概念:综合考虑重叠区域、中心点距离和长宽比。

三、EIoU、SIoU、EIoU、WIoU等损失函数代码块
import numpy as np
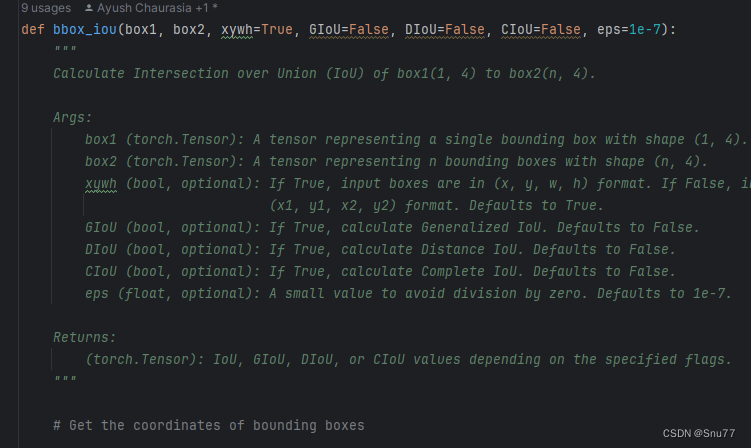
import torch, mathclass WIoU_Scale:''' monotonous: {None: origin v1True: monotonic FM v2False: non-monotonic FM v3}momentum: The momentum of running mean'''iou_mean = 1.monotonous = False_momentum = 1 - 0.5 ** (1 / 7000)_is_train = Truedef __init__(self, iou):self.iou = iouself._update(self)@classmethoddef _update(cls, self):if cls._is_train: cls.iou_mean = (1 - cls._momentum) * cls.iou_mean + \cls._momentum * self.iou.detach().mean().item()@classmethoddef _scaled_loss(cls, self, gamma=1.9, delta=3):if isinstance(self.monotonous, bool):if self.monotonous:return (self.iou.detach() / self.iou_mean).sqrt()else:beta = self.iou.detach() / self.iou_meanalpha = delta * torch.pow(gamma, beta - delta)return beta / alphareturn 1def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, SIoU=False, EIoU=False, WIoU=False, alpha=1,gamma=0.5, scale=False, eps=1e-7):# Returns the IoU of box1 to box2. box1 is 4, box2 is nx4box2 = box2.T# Get the coordinates of bounding boxesif x1y1x2y2: # x1, y1, x2, y2 = box1b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]else: # transform from xywh to xyxyb1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2# Intersection areainter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \(torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)# Union Areaw1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + epsw2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + epsunion = w1 * h1 + w2 * h2 - inter + epsif scale:self = WIoU_Scale(1 - (inter / union))# IoU# iou = inter / union # ori iouiou = torch.pow(inter / (union + eps), alpha) # alpha iouif CIoU or DIoU or GIoU or EIoU or SIoU or WIoU:cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) widthch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex heightif CIoU or DIoU or EIoU or SIoU or WIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal squaredrho2 = (((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4) ** alpha # center dist ** 2if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)with torch.no_grad():alpha_ciou = v / (v - iou + (1 + eps))return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoUelif EIoU:rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2cw2 = torch.pow(cw ** 2 + eps, alpha)ch2 = torch.pow(ch ** 2 + eps, alpha)return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # EIouelif SIoU:# SIoU Loss https://arxiv.org/pdf/2205.12740.pdfs_cw = (b2_x1 + b2_x2 - b1_x1 - b1_x2) * 0.5 + epss_ch = (b2_y1 + b2_y2 - b1_y1 - b1_y2) * 0.5 + epssigma = torch.pow(s_cw ** 2 + s_ch ** 2, 0.5)sin_alpha_1 = torch.abs(s_cw) / sigmasin_alpha_2 = torch.abs(s_ch) / sigmathreshold = pow(2, 0.5) / 2sin_alpha = torch.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1)angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2)rho_x = (s_cw / cw) ** 2rho_y = (s_ch / ch) ** 2gamma = angle_cost - 2distance_cost = 2 - torch.exp(gamma * rho_x) - torch.exp(gamma * rho_y)omiga_w = torch.abs(w1 - w2) / torch.max(w1, w2)omiga_h = torch.abs(h1 - h2) / torch.max(h1, h2)shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha) # SIouelif WIoU:if scale:return getattr(WIoU_Scale, '_scaled_loss')(self), (1 - iou) * torch.exp((rho2 / c2)), iou # WIoU https://arxiv.org/abs/2301.10051else:return iou, torch.exp((rho2 / c2)) # WIoU v1return iou - rho2 / c2 # DIoUc_area = cw * ch + eps # convex areareturn iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU https://arxiv.org/pdf/1902.09630.pdfreturn iou # IoU四、添加EIoU、SIoU、EIoU、AlphaIoU等损失函数到模型中
7.1 修改一
第一步我们需要找到如下的文件ultralytics/utils/metrics.py,找到如下的代码,下面的图片是原先的代码部分截图的正常样子,然后我们将上面的整个代码块将下面的整个方法(这里这是部分截图)内容全部替换
7.2 修改二
第二步我们找到另一个文件如下->"ultralytics/models/utils/loss.py",(注意这个文件和YOLOv8的修改内容不是一个!!!!)我们找到如下的代码块,我们就可以进行设置了,看到我这里以及将EIoU都设置成True了,并且引入了alpha的思想进行改进大家可以多进行尝试。

(这里暂时还不能使用Focus的思想!!!)
五、总结
到此本文的正式分享内容就结束了,在这里给大家推荐我的RT-DETR改进有效涨点专栏,本专栏目前为新开的平均质量分98分,后期我会根据各种最新的前沿顶会进行论文复现,也会对一些老的改进机制进行补充,目前本专栏免费阅读(暂时,大家尽早关注不迷路~),如果大家觉得本文帮助到你了,订阅本专栏,关注后续更多的更新~
本专栏其它内容(持续更新)
RT-DETR改进专栏:RT-DETR专栏——持续复现各种顶会内容——论文收割机

相关文章:
【RT-DETR改进】SIoU、GIoU、CIoU、DIoU、AlphaIoU等二十余种损失函数
一、本文介绍 这篇文章介绍了RT-DETR的重大改进,特别是在损失函数方面的创新。它不仅包括了多种IoU损失函数的改进和变体,如SIoU、WIoU、GIoU、DIoU、EIOU、CIoU,还融合了“Alpha”思想,创造了一系列新的损失函数。这些组合形式的…...
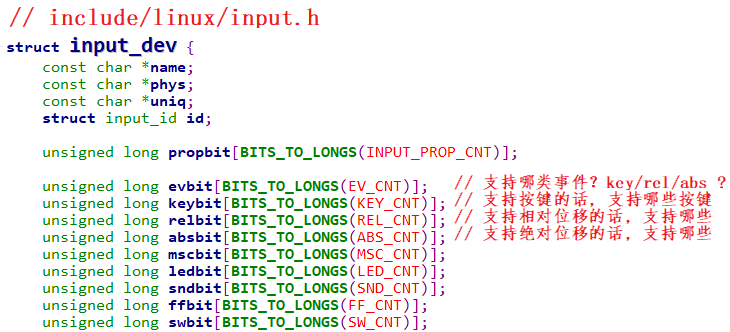
【Linux】EVIOCGBIT
EVIOCGBIT(ev, len) 该怎么理解? 我们可以推断出,它是一个宏,它的前两个参数已经确定了,具体的功能由后两个参数(ev,len)来决定。Linux-4.9.88\include\uapi\linux\input.h #define EVIOCGBIT(ev,len) _IOC(_IOC_READ, E, 0x20 …...
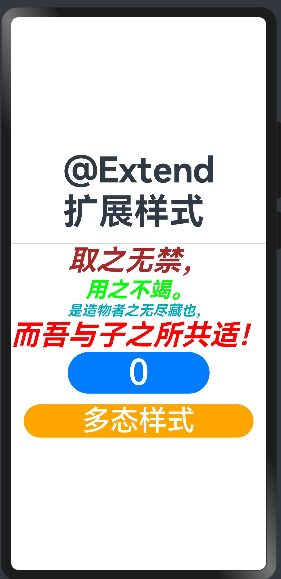
鸿蒙4.0开发笔记之ArkTS装饰器语法基础@Extend扩展组件样式与stateStyles多态样式(十一)
一、Extend扩展组件样式 1、作用 前文提到可以使用Styles用于样式的扩展,在Styles的基础上,ArkTS语法还提供了Extend,⽤于扩展原生组件样式,包括Text、Button等等。 2、定义语法 Extend(UIComponentName) function functionNam…...
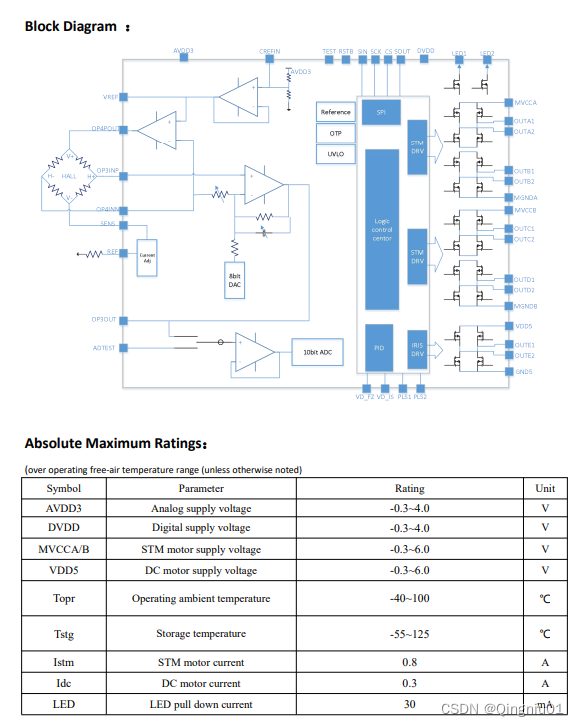
5V摄像机镜头驱动IC GC6208,可用于摄像机,机器人等产品中可替代AN41908
GC6208是一个镜头电机驱动IC摄像机和安全摄像机。该设备集成了一个直流电机驱动器的Iris的PID控制系统,也有两个通道的STM电机驱动器的变焦和对焦控制。 芯片的特点: 内置用于Iris控制器的直流电机驱动器 内置2个STM驱动程序,用于缩放和…...

PHP echo和print 语句
PHP 是通过 print 和 echo 语句来动态输出 HTML 内容,虽然 print 和 echo 语句两者的功能几乎是完全一样,但是还是有一点差别的。 在 PHP 中有两个基本的输出方式: echo 和 print。 本章节中我们会详细讨论两个语句的用法,并在实…...
ThinkPHP6.1 多应用模式的一些事儿
TP安装就不说了,直接从安装完成开始了。 安装多应用模式扩展 think-multi-app composer require topthink/think-multi-app删除 app 目录下的 controller 文件夹(TP 是根据是否有这个文件夹来判断单应用模式还是多应用模式的)。 创建应用 …...
redis-cluster集群模式
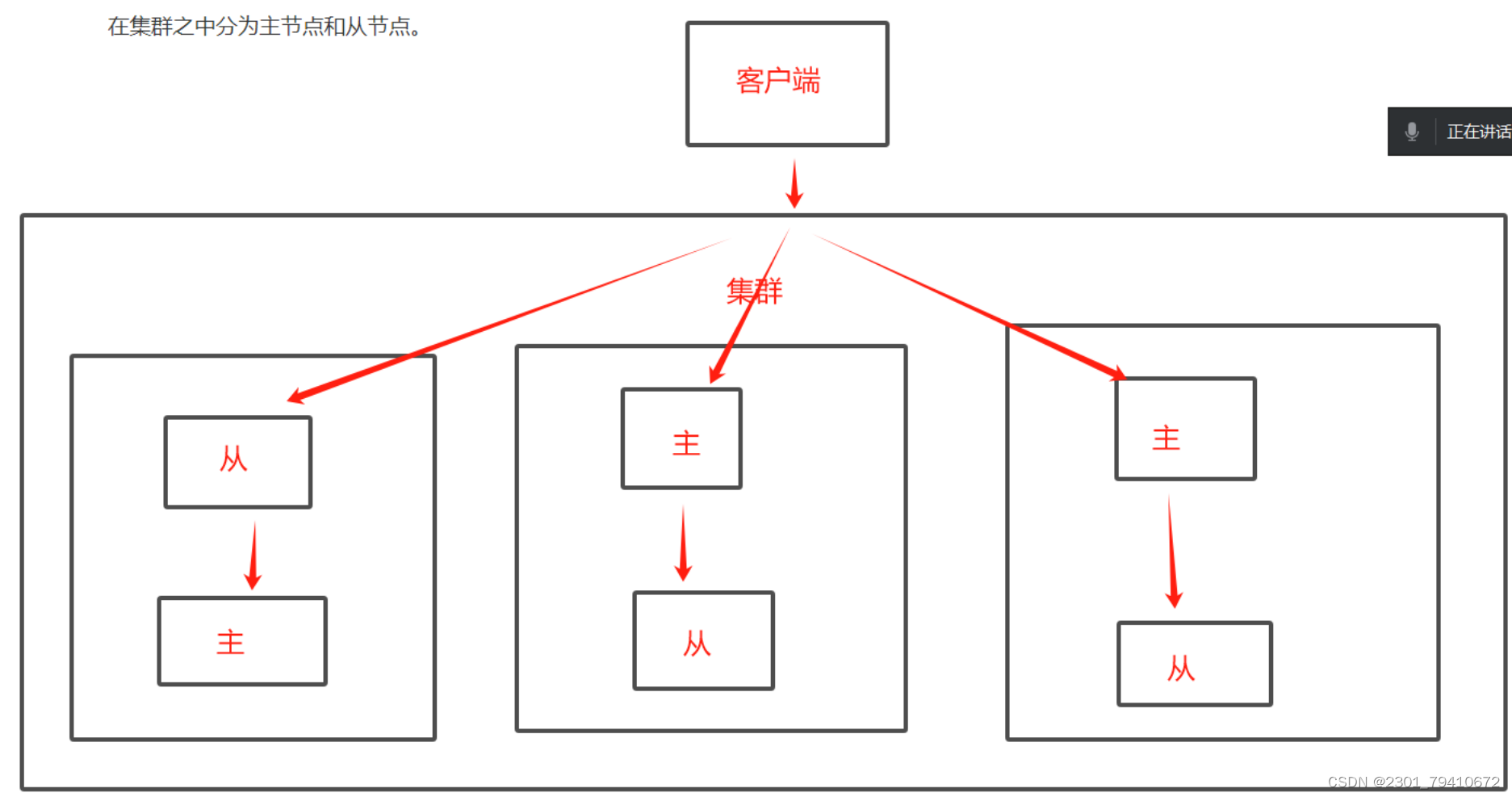
Redis-cluster集群 1 Redis3.0引入的分布式存储方案 2集群由多个node节点组成,redis数据分布在节点之中,在集群之中分为主节点和从节点3集群模式当中,主从一一对应,数据写入和读取与主从模式一样,主负责写,从只能读4集群模式自带哨兵模式,可…...

带你用uniapp从零开发一个仿小米商场_10. 首页开发
图标菜单栏开发 轮播图开发完成后,就是图标菜单栏了 可以看出这些图标都是一样的样式,所以可以勇哥flex布局让他们每个占百分之20 代码如下,既然都是一样的那就直接用个循环嵌套一下 data数据如下 同样,为了能让这段代码能在别的地方也用到,我直接把它封装成组件 <templ…...

常使用的定时任务
常使用的定时任务 一、 linux自带的定时任务 1、crontab 有这样一个需求:我们使用Java写一个工具jar包在系统空闲的时候去采集已经部署在Linux系统上的项目的一 些数据,可以使用 linux 系统的 crontab。 运行crontab -e,可以编辑定时器&…...

【人工智能Ⅰ】实验2:遗传算法
实验2 遗传算法实验 一、实验目的 熟悉和掌握遗传算法的原理、流程和编码策略,理解求解TSP问题的流程并测试主要参数对结果的影响,掌握遗传算法的基本实现方法。 二、实验原理 旅行商问题,即TSP问题(Traveling Salesman Proble…...
)
Hadoop集群升级(3.1.3 -> 3.2.4)
升级前确认 旧版本:3.1.3 升级版本:3.2.4 旧版本安装路径:/ddhome/bin/hadoop/ 新版本安装路径:/ddhome/bin/hadoop-3.2.4 安装新版本hadoop 解压安装 # 解压安装包到相应目录下 tar -zxvf /ddhome/tools/hadoop-3.2.4.tar.gz…...
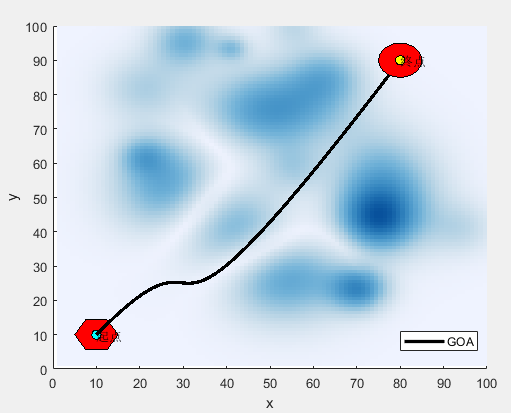
(一)基于高尔夫优化算法GOA求解无人机三维路径规划研究(MATLAB)
一、无人机模型简介: 单个无人机三维路径规划问题及其建模_IT猿手的博客-CSDN博客 参考文献: [1]胡观凯,钟建华,李永正,黎万洪.基于IPSO-GA算法的无人机三维路径规划[J].现代电子技术,2023,46(07):115-120 二、高尔夫优化算法GOA简介 高尔夫优化算法…...

ESP32-Web-Server编程-建立第一个网页
ESP32-Web-Server编程-建立第一个网页 HTTP 简述 可能你每天都要刷几个短视频,打开几个网页来娱乐一番。当你打开一个网络上的视频或者图片时,其实际发生了下面的流程: 其中客户端就是你的浏览器啦,服务器就是远程一个存放视频或…...

csgo/steam游戏搬砖项目的五大认知误区
CSGO/steam游戏搬砖项目的5大认知误区 1、卡价越高越难选品?越没利润? 2、明明buff卖价《 steam求购价,为什么还能赚钱? 3、实名资料少就没法批量操作账号? 4、本金少就没法玩? 5、这个项目的风险是不是很大…...

ASCII sorting
描述 输入一个字符串,对其字符进行排序,输出其字符按ASCII码升序排列。 输入 无空格字符串 输出 按ASCII码升序输出其字符。 样例输入 and 样例输出 adn code(c版本) #include<stdio.h> #include<stdlib.h> // qs…...
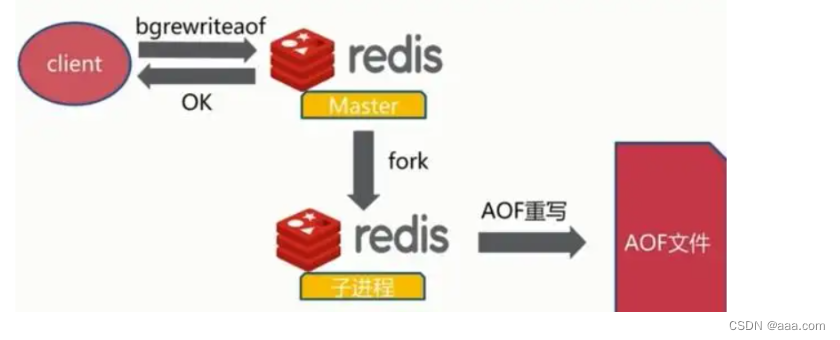
redis--高可用之持久化
redis高可用相关知识 在web服务器中,高可用是指服务器可以正常访问的时间,衡量的标准是在多长时间内可以提供正常服务(99.9%、99.99%、99.999%等等)。 但是在Redis语境中,高可用的含义似乎要宽泛一些,除了保证提供正常服务( 如主…...
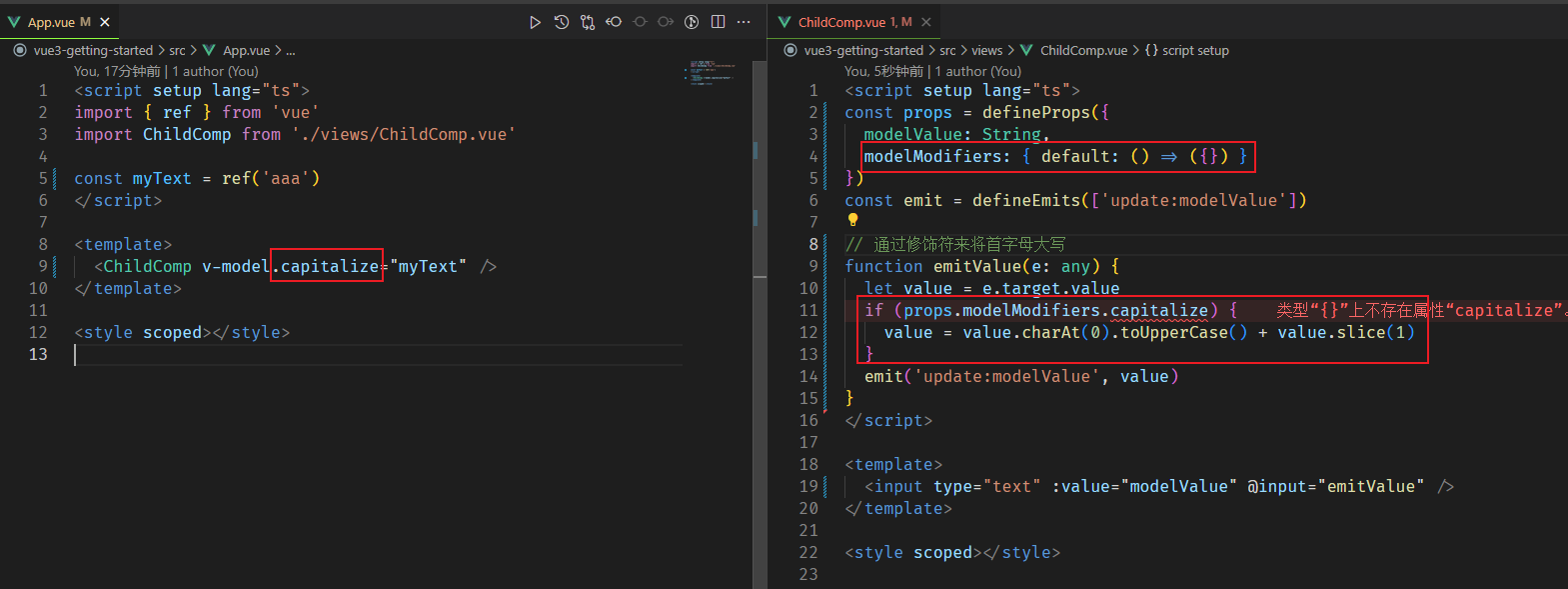
『VUE3 の 要点摘录』
✅v-model 用法 v-model 原生方法: v-model computed : 更改名字: 多个 v-model 绑定 处理 v-model 修饰符 ✅TS项目报错 1、TypeScript 错误 “Module ‘…index’ has no default export” // tsconfig.json {...."compilerOpt…...

Buzz库python代码示例
Buzz库来编写一个下载器程序。 php <?php require_once vendor/autoload.php; // 引入Buzz库 use Buzz\Browser; use Buzz\Message\Response; $browser new Browser(); // 设置 $browser->setHttpClient(new HttpClientProxy([ host > , port > , ])…...
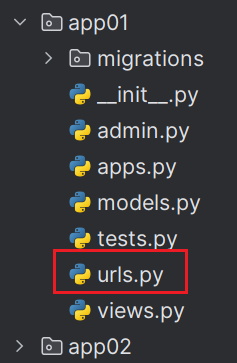
Django路由分发
首先明白一点,Django的每一个应用下都可以有自己的templates文件夹,urls.py文件夹,static文件夹,基于这个特点,Django能够很好的做到分组开发(每个人只写自己的app),作为老大&#x…...
【UGUI】中Content Size Fitter)组件-使 UI 元素适应其内容的大小
官方文档:使 UI 元素适应其内容的大小 - Unity 手册 必备组件:Content Size Fitter 通常,在使用矩形变换定位 UI 元素时,应手动指定其位置和大小(可选择性地包括使用父矩形变换进行拉伸的行为)。 但是&a…...

亚马逊卖家公开信息数据提取:反爬攻防战与 Python 批量采集实战
摘要: 批量获取亚马逊(Amazon)第三方卖家的商业名称、信用代码和注册地址等信息,对于跨境 B2B 拓客和供应链分析具有重要意义。然而,亚马逊的 Cloudflare 盾和 Robot 验证码构成了极高的反爬门槛。本文将深度解析亚马逊…...

Python 3.7 + XGBoost 多分类实战:从数据清洗到SHAP模型解释的保姆级教程
Python 3.7 XGBoost 多分类实战:从数据清洗到SHAP模型解释的保姆级教程在机器学习领域,XGBoost因其出色的性能和可解释性成为众多数据科学家的首选工具。本文将带您完整走过多分类任务的全流程,从原始数据到可解释的预测模型,每个…...

金融合规审核为何人力堆积却仍漏洞百出?2026年RegTech演进与Agent全链路闭环解决方案
在2026年的金融监管环境下,合规审核已不再是简单的“查漏补缺”,而是演变为一场高强度的算力与逻辑博弈。尽管金融机构在合规成本上的投入逐年攀升,甚至不惜以“人海战术”填补流程断点,但监管罚单的数额与频率却并未显著下降。这…...

碧蓝航线自动化脚本终极指南:3小时学会全自动游戏管理
碧蓝航线自动化脚本终极指南:3小时学会全自动游戏管理 【免费下载链接】AzurLaneAutoScript Azur Lane bot (CN/EN/JP/TW) 碧蓝航线脚本 | 无缝委托科研,全自动大世界 项目地址: https://gitcode.com/gh_mirrors/az/AzurLaneAutoScript 还在为碧蓝…...

基于SMD与贝壳的微型音频装置:从电路设计到嵌入式开发的完整实践
1. 项目概述:一个藏在贝壳里的声音世界你小时候有没有捡起一个海螺壳,把它贴在耳边,然后听到里面传来“呜呜”的海风声?那个瞬间,仿佛整个海洋都被装进了小小的贝壳里。今天这个项目,就是把那个童年的魔法&…...
)
DeepSeek代码风格检查避坑指南(内部审计报告首次披露:37个被忽略的合规红线)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek代码风格检查的合规性本质与审计背景 DeepSeek代码风格检查并非单纯的技术偏好约束,而是嵌入研发治理链条中的合规性控制节点。其本质是将编程实践与组织级安全策略、行业监管要求&…...

JS中forEach与普通for
for就不用说了,最普通的循环函数forEach1. 只写 1 个参数只接收当前遍历元素let arr [10,20,30] arr.forEach(item > {console.log(item) // 依次 10、20、30 })2. 写 2 个参数依次接收元素值、下标索引let arr [10,20,30] arr.forEach((item, index) > {co…...

遭遇薪酬倒挂后的反向谈判与资产重估策略「蒸汽求职分享」
在 2026 年全球科技大厂与跨国泛金融巨头追求极致人效、频繁进行组织架构重组(Reorg)的买方市场中,一个让无数海外名校留学生在入职两年后心态瞬间崩塌的现象,正在高频发生——“薪酬倒挂(Salary Inversion)…...

使用curl命令调试Taotoken API接口的常见问题排查
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用curl命令调试Taotoken API接口的常见问题排查 基础教程类,面向所有需要通过HTTP直接与API交互的开发者,…...

概率论:常见分布的期望与方差、中心极限定理、切比雪夫不等式
目录 一、0、1分布 二、二项分布 三、泊松分布 四、均匀分布 五、指数分布 六、正态分布 七、中心极限定理及其应用 (1)中心极限定理的定义 (2)使用示例 八、切比雪夫不等式 (1)切比雪夫不…...