基于Python的面向对象分类实例Ⅱ
接上一部分继续介绍~
一、地类矢量转栅格
这一步是为了能让地类值和影像的对象落在同一区域,从而将影像中的分割对象同化为实际地物类别。
train_fn = r".\train_data1.shp"
train_ds = ogr.Open(train_fn)
lyr = train_ds.GetLayer()
driver = gdal.GetDriverByName('MEM')
target_ds = driver.Create('', im_width, im_height, 1, gdal.GDT_UInt16)
target_ds.SetGeoTransform(im_geotrans)
target_ds.SetProjection(im_proj)
options = ['ATTRIBUTE=tyPE']
gdal.RasterizeLayer(target_ds, [1], lyr, options=options)
data = target_ds.GetRasterBand(1).ReadAsArray()
ground_truth = target_ds.GetRasterBand(1).ReadAsArray()
ground_truth = ground_truth.transpose((1, 0))
classes = np.unique(ground_truth)[1:]最终得到带有地物类别数据的栅格点数据。
二、特征匹配
将得到的栅格点真实地物数据通过迭代与影像对象相匹配后,通过迭代器寻找对象的相应特征。
segments_per_class = {}
for klass in classes:segments_of_class = segments[ground_truth == klass]segments_per_class[klass] = set(segments_of_class)intersection = set()
accum = set()
for class_segments in segments_per_class.values():intersection |= accum.intersection(class_segments)accum |= class_segments
assert len(intersection) == 0, "Segment(s) represent multiple classes"
print("adjust complete")
end3 = time.time()
print('Running time2: %s Seconds'%(end3-start3))print("start train randomforest classification")
start4 = time.time()
train_img = np.copy(segments)
threshold = train_img.max() + 1 for klass in classes:class_label = threshold + klassfor segment_id in segments_per_class[klass]:train_img[train_img == segment_id] = class_labeltrain_img[train_img <= threshold] = 0
train_img[train_img > threshold] -= thresholdtraining_objects = []
training_labels = []
for klass in classes:class_train_object = [v for i, v in enumerate(objects) if segment_ids[i] in segments_per_class[klass]]training_labels += [klass] * len(class_train_object)training_objects += class_train_object在实际的影像样本构建过程中,有的地物样本可能彼此距离相差较小,造成两个或多个样本落在同一个分割区域,这样会导致特征匹配迭代无限进行下去,所以我们要从两个或多个样本中取其一。
三、分类
最后利用scikit-learn的随机森林分类器,对样本分割块和其他未定义分割块进行预测,最后将结果输出到栅格中。
def PolygonizeTheRaster(inputfile,outputfile):dataset = gdal.Open(inputfile, gdal.GA_ReadOnly)srcband=dataset.GetRasterBand(1)im_proj = dataset.GetProjection()prj = osr.SpatialReference() prj.ImportFromWkt(im_proj)drv = ogr.GetDriverByName('ESRI Shapefile')dst_ds = drv.CreateDataSource(outputfile)dst_layername = 'out'dst_layer = dst_ds.CreateLayer(dst_layername, srs=prj)dst_fieldname = 'DN'fd = ogr.FieldDefn(dst_fieldname, ogr.OFTInteger)dst_layer.CreateField(fd)dst_field = 0gdal.Polygonize(srcband, None, dst_layer, dst_field) classifier = RandomForestClassifier(n_jobs=-1)
classifier.fit(training_objects, training_labels)
predicted = classifier.predict(objects) clf = segments.copy()
for segment_id, klass in zip(segment_ids, predicted):clf[clf == segment_id] = klass
# temp = temp.transpose((2, 1, 0))
mask = np.sum(temp, axis=2)
mask[mask > 0.0] = 1.0
mask[mask == 0.0] = -1.0clf = np.multiply(clf, mask)
clf[clf < 0] = -9999.0
clf = clf.transpose((1, 0))
clfds = driverTiff.Create(r"D:\Data\testdata\classification\result.tif", im_width, im_height,1, gdal.GDT_Float32)
clfds.SetGeoTransform(im_geotrans)
clfds.SetProjection(im_proj)
clfds.GetRasterBand(1).SetNoDataValue(-9999.0)
clfds.GetRasterBand(1).WriteArray(clf)
clfds = Noneend4 = time.time()
outputfile = r".\result2.shp"
print('Running time2: %s Seconds'%(end4-start4))
PolygonizeTheRaster(r".\result.tif",outputfile)类在影像中的标记ID是1、2、3等等数值,因此用一般的栅格查看软件很难从肉眼进行查看。这里为了方便读者查看以及制图,我还进行了栅格转矢量的操作,这样放到arcmap中能清晰的查看分类情况。
最后的分类结果:
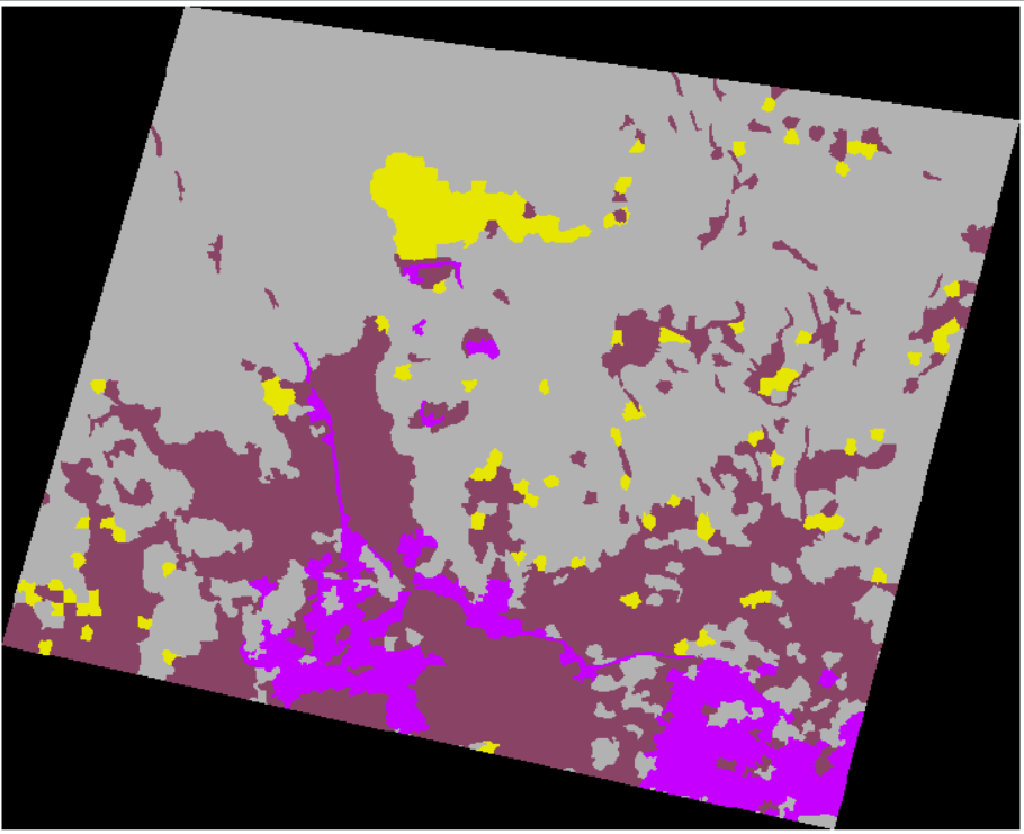
图1 分类结果图

图2 林地分类效果
相关文章:
基于Python的面向对象分类实例Ⅱ
接上一部分继续介绍~ 一、地类矢量转栅格 这一步是为了能让地类值和影像的对象落在同一区域,从而将影像中的分割对象同化为实际地物类别。 train_fn r".\train_data1.shp" train_ds ogr.Open(train_fn) lyr train_ds.GetLayer() driver gdal.GetDrive…...

android手机莫名其妙卸载重装有残留数据
参考文档: https://developer.android.com/guide/topics/data/autobackup?hlzh-cn https://developer.android.com/about/versions/12/backup-restore#xml-changes https://stackoverflow.com/questions/70365809/how-to-specify-to-not-allow-any-data-backup-wit…...
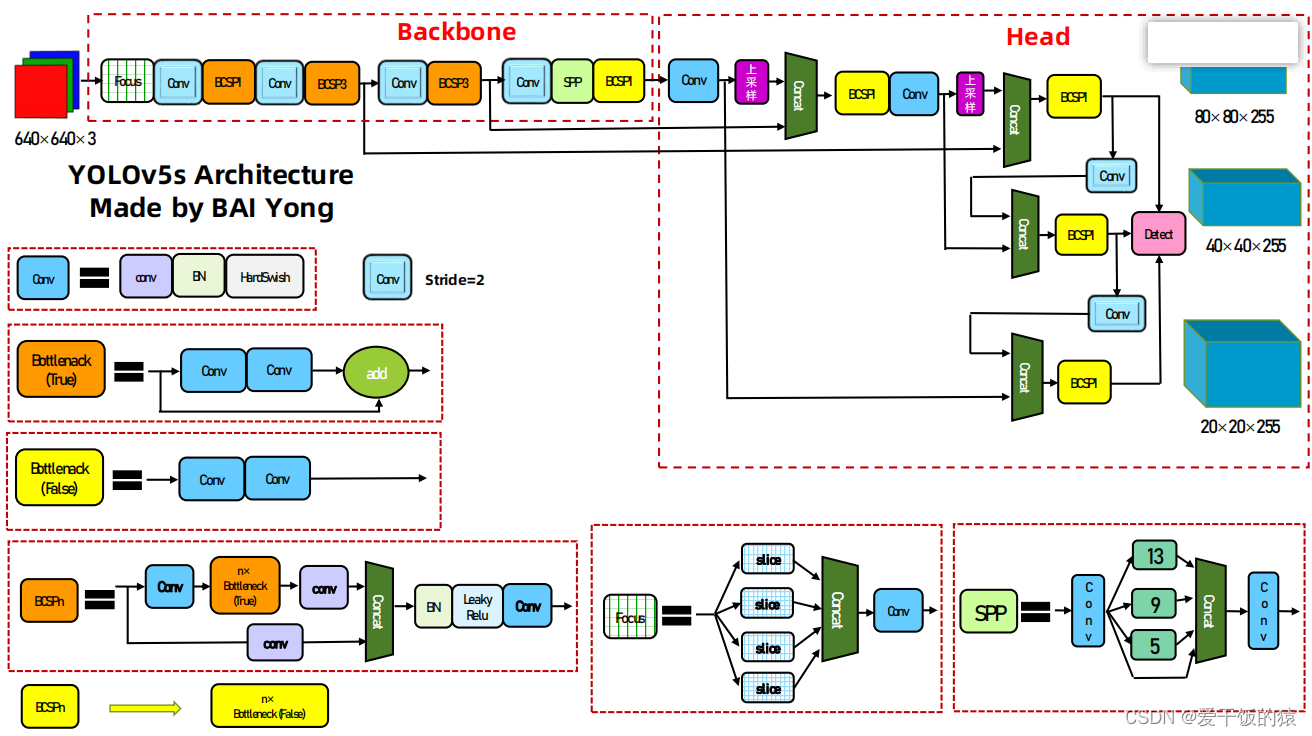
【YOLOv5入门】目标检测
【大家好,我是爱干饭的猿,本文重点介绍YOLOv5入门-目标检测的任务、性能指标、yolo算法基本思想、yolov5网络架构图。 后续会继续分享其他重要知识点总结,如果喜欢这篇文章,点个赞👍,关注一下吧】 上一篇…...
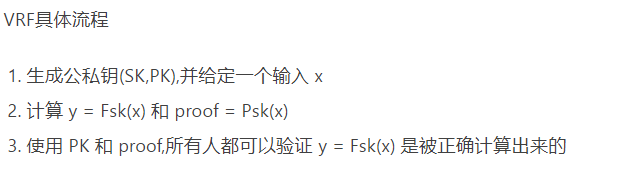
可验证随机函数(VRF)
文章目录 一、背景以及场景共识发展第一代 POW “以力取胜”第二代 POS/DPOS “民主投票”第三代 VRF “运气抽签” 二、可验证随机函数(VRF)快速开始1. VRF是什么?2. MD5 hash函数和VRF(Verifiable Random Function)区别3. VRF-…...
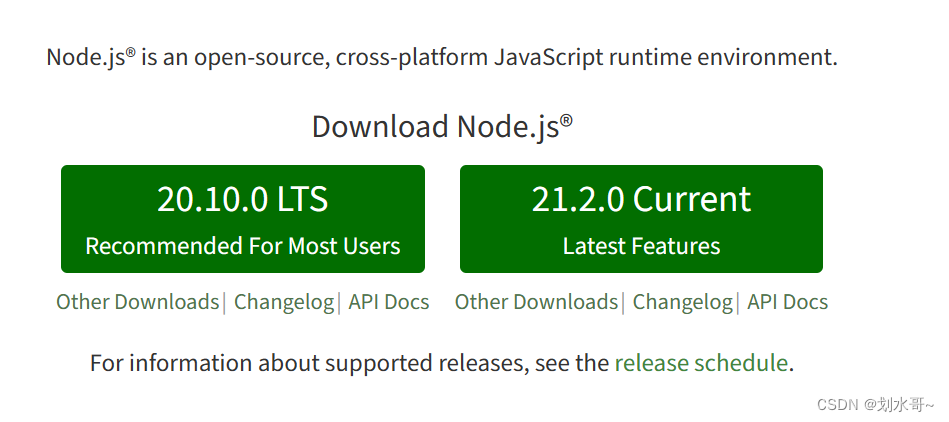
Node.js与npm的准备与操作
1.下载 Node.js官网:Node.jsNode.js is a JavaScript runtime built on Chromes V8 JavaScript engine.https://nodejs.org/en 打开后的界面如下: LTS(Long Term Support):长期支持版,稳定版 Current&am…...

ui设计师简历自我评价的范文(合集)
ui设计师简历自我评价的范文篇一 本人毕业于艺术设计专业,具有较高的艺术素养,平时注重设计理论知识的积累,并将理论应用到作品中。了解当下设计的流行趋势,设计注重细节、重视用户体验,对色彩搭配有着浓厚的兴趣&…...
sqli-labs靶场详解(less32-less37)
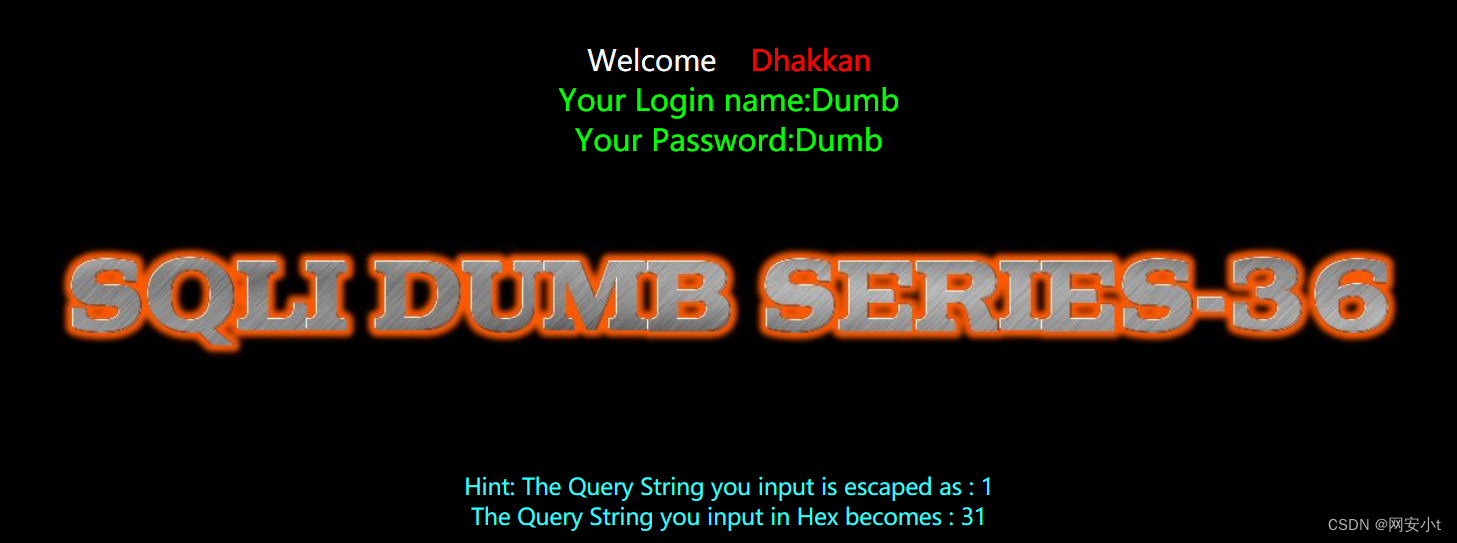
宽字节注入 原理在下方 目录 less-32 less-33 less-34 less-35 less-36 less-37 less-32 正常页面 ?id1 下面有提示 获取到了Hint: The Query String you input is escaped as : 1\ ?id1 看来是把参数中的非法字符就加上了转义 从而在数据库中只能把单引号当成普通的字…...
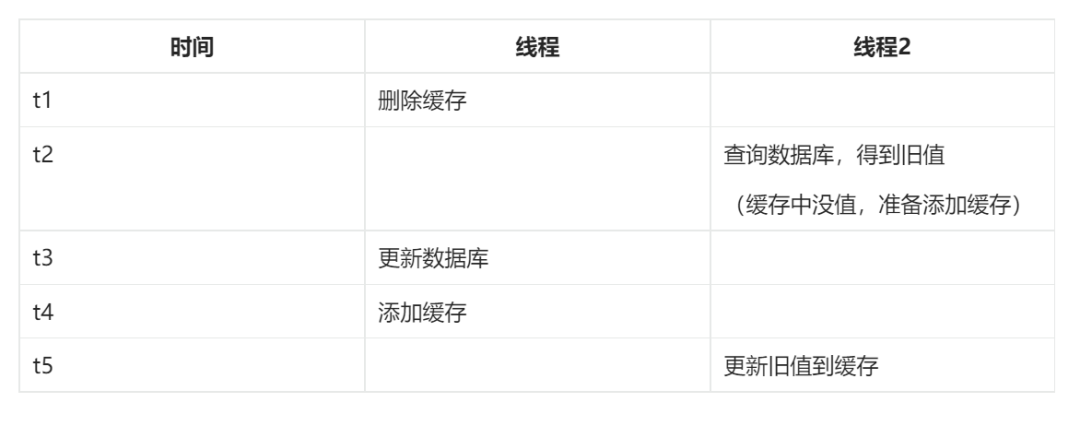
如何保证缓存和数据库的双写一致性?
一、什么是数据库和缓存双写一致性? 在分布式系统中,数据库和缓存会搭配一起使用,以此来保证程序的整体查询性能。也就说,分布式系统为了缓解数据库查询的压力,会将查出来的数据保存在缓存中,下次再查询时…...

Rosbag 制作 TUM数据集
Rosbag 制作 TUM数据集 一、创建rgb和depth文件夹和txt文件 mkdir rgb mkdir depth touch rgb.txt touch depth.txt 二、替换 bag 路径 和 topic tum.py: import os import cv2 import numpy as np import rosbag from sensor_msgs.msg import Image from cv_b…...

本地websocket服务端暴露至公网访问【cpolar内网穿透】
本地websocket服务端暴露至公网访问【cpolar内网穿透】 文章目录 本地websocket服务端暴露至公网访问【cpolar内网穿透】1. Java 服务端demo环境2. 在pom文件引入第三包封装的netty框架maven坐标3. 创建服务端,以接口模式调用,方便外部调用4. 启动服务,出现以下信息表示启动成功…...

男UI设计师主要是做什么的优漫教育
1、根据各种相关软件的用户群,提出构思新颖、有高度吸引力的创意设计; 2、对页面进行优化,使用户操作更趋于人性化; 3、维护现有的应用产品; 4、收集和分析用户对于GUI的需求。 二、需要学什么…...
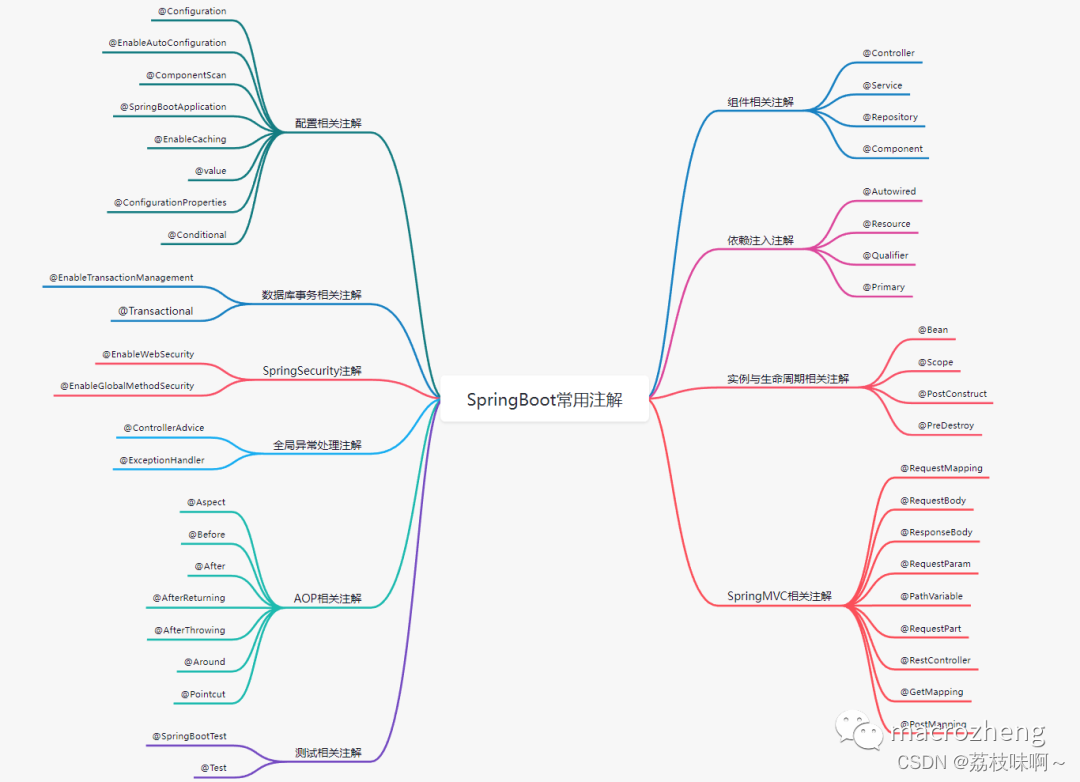
超实用!Spring Boot 常用注解详解与应用场景
目录 一、Web MVC 开发时,对于三层的类注解 1.1 Controller 1.2 Service 1.3 Repository 1.4 Component 二、依赖注入的注解 2.1 Autowired 2.2 Resource 2.3 Resource 与 Autowired 的区别 2.3.1 实例讲解 2.4 Value 2.5 Data 三、Web 常用的注解 3.1…...
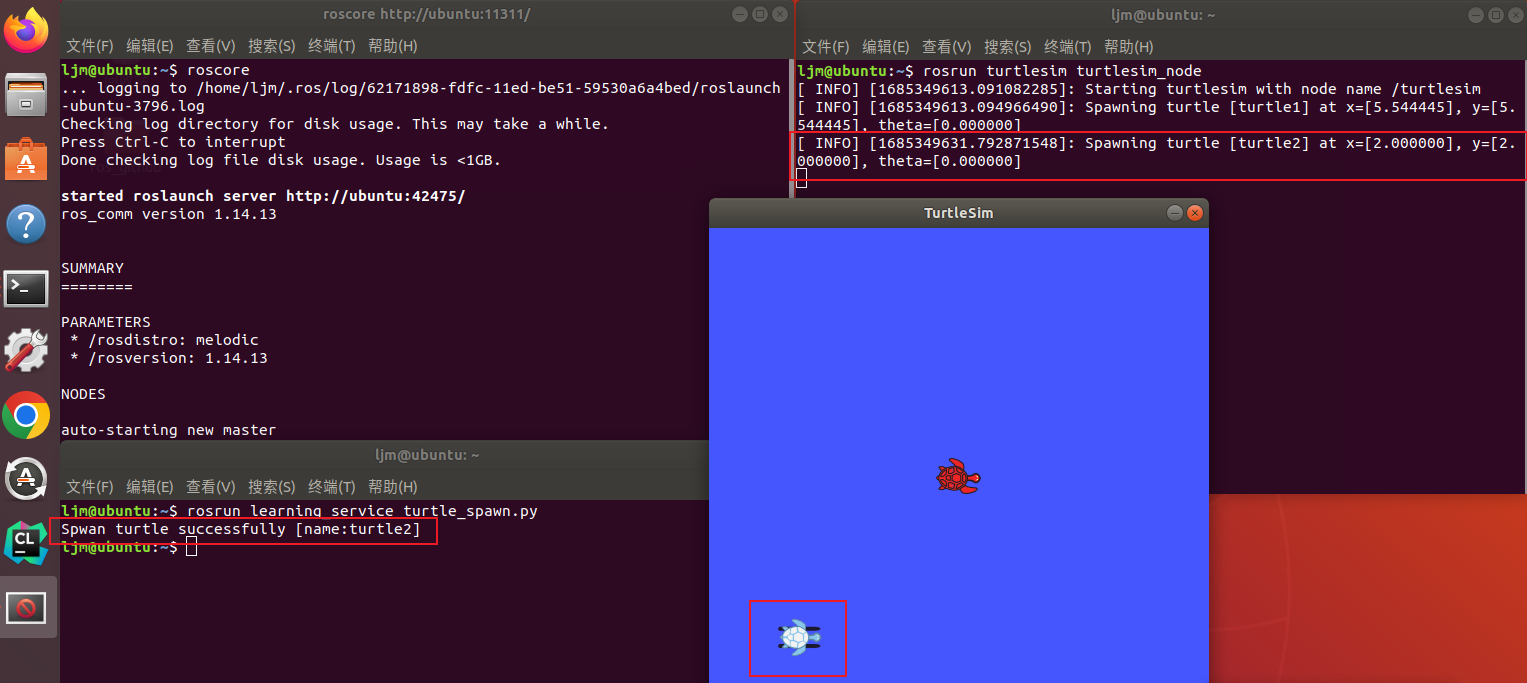
【古月居《ros入门21讲》学习笔记】11_客户端Client的编程实现
目录 说明: 1. 服务模型 2. 实现过程(C) 创建功能包 创建客户端代码(C) 配置客户端代码编译规则 编译 运行 3. 实现过程(Python) 创建客户端代码(Python) 运行…...

小程序和Vue写法的区别主要有什么不同
1.语法不同:小程序使用的是WXML、WXSS和JS,而Vue使用的是HTML、CSS和JSX。 2.数据绑定方式不同:小程序使用的是双向数据绑定,而Vue使用的是单向数据流。 1)在小程序中需要使用e.currentTarget.dataset.*的方式获取&…...

Flutter之MQTT使用
1.添加依赖: 首先,需要在Flutter项目的pubspec.yaml文件中添加mqtt_client依赖。 dependencies:#https://pub.dev/packages/mqtt_clientmqtt_client: ^10.0.02.创建MQTT客户端并连接到MQTT服务器:2.创建一个MQTT客户端实例来进行连接和通信 Fu…...

vr红色教育虚拟展馆全景制作提升单位品牌形象
720全景展馆编辑平台以其独特的优势,为展览行业带来了革命性的变革。这种创新的技术应用为参展商提供了更高效、更便捷、更全面的展示解决方案,进一步提升了展览行业的水平和影响力。 一、提升展示效果,增强品牌形象 720全景展馆编辑平台通过…...
【Spring】Spring是什么?
文章目录 前言什么是Spring什么是容器什么是 IoC传统程序开发控制反转式程序开发理解Spring IoCDI Spring帮助网站 前言 前面我们学习了 servlet 的相关知识,但是呢?使用 servlet 进行网站的开发步骤还是比较麻烦的,而我们本身程序员就属于是…...

事件循环机制及常见面试题
借鉴: 《Javascript 忍者秘籍》第二版,事件循环篇 面试 | JS 事件循环 event loop 经典面试题含答案 - 知乎 (zhihu.com) 概念 主栈队列就是一个宏任务,每一个宏任务执行完就会执行宏任务中的微任务,直到微任务全部都执行完&a…...

智能监控平台/视频共享融合系统EasyCVR接入RTSP协议视频流无法播放原因是什么?
视频集中存储/云存储/视频监控管理平台EasyCVR能在复杂的网络环境中,将分散的各类视频资源进行统一汇聚、整合、集中管理,实现视频资源的鉴权管理、按需调阅、全网分发、智能分析等。AI智能/大数据视频分析EasyCVR平台已经广泛应用在工地、工厂、园区、楼…...

c# statusStrip 显示电脑主机名、IP地址、MAC地址
控件: ToolStripStatusLabel 主机名: Dns.GetHostName() IP地址: Dns.GetHostAddresses(Dns.GetHostName())[0].ToString() 当前程序的版本: Assembly.GetExecutingAssembly().GetName().Version.ToString() 获取系统版本 …...

AI写作辅助平台8款AI写作辅助软件梯队榜,毕业护航!
论文选题毫无头绪,文献检索耗时费力,格式排版反复修改? 查重率居高不下,写作思路始终不畅,时间紧迫却无从下手? 面对繁杂的学术任务,你是否也感到力不从心? 别担心!AI论文…...
)
DeepSeek数据脱敏与联邦学习实战方案(2024最新版零信任架构白皮书)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek数据隐私保护概述 DeepSeek系列大模型在训练与推理过程中严格遵循数据最小化、目的限定及用户可控原则,其隐私保护机制贯穿数据采集、预处理、模型训练、服务部署与日志管理全生命周…...
Zotero PDF Translate:打破语言壁垒的学术翻译神器
Zotero PDF Translate:打破语言壁垒的学术翻译神器 【免费下载链接】zotero-pdf-translate Translate PDF, EPub, webpage, metadata, annotations, notes to the target language. Support 20 translate services. 项目地址: https://gitcode.com/gh_mirrors/zo/…...

独立开发者如何借助 Taotoken 一站式管理多个项目的 AI 调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 独立开发者如何借助 Taotoken 一站式管理多个项目的 AI 调用 对于独立开发者而言,同时维护多个项目是常态。每个项目可…...

Taotoken官方价折扣与Token Plan套餐的实际节省效果分析
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken官方价折扣与Token Plan套餐的实际节省效果分析 1. 引言 在接入和使用大模型API时,成本是开发者与团队持续关…...

Taotoken 平台在应对突发流量时 API 路由与容灾的实际表现观察
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken 平台在应对突发流量时 API 路由与容灾的实际表现观察 1. 背景与场景 近期,我们团队负责的一款应用进行了产品…...
全流程)
[实战] 2026年CNC加工质量管理:从数字化图纸识别到自动化检验计划(FAI)全流程
2026 年,精密CNC 加工 (CNC machining) 行业对交付周期的要求已压缩至极限,如何快速从工程图纸中提取关键特性并生成检验计划,成为质量工程师的核心痛点。在传统的制造流程中,质量工程师需要手动在纸质或 PDF 图纸上圈出尺寸&…...

OpenMemories-Tweak终极指南:3步解锁索尼相机全部隐藏功能
OpenMemories-Tweak终极指南:3步解锁索尼相机全部隐藏功能 【免费下载链接】OpenMemories-Tweak Unlock your Sony cameras settings 项目地址: https://gitcode.com/gh_mirrors/op/OpenMemories-Tweak OpenMemories-Tweak是一款专为索尼相机用户设计的开源工…...

具身智能的发展趋势对就业市场的影响是什么?
具身智能对就业的核心影响是结构性重塑:短期替代大量重复性岗位、长期创造更高价值的新岗位,整体呈现 “替代 — 创造 — 转型” 的震荡再平衡过程。下面从替代、创造、结构变化、技能与分配、时间线五个方面展开。一、岗位替代:低技能、高重…...

2026年10款论文降AIGC软件实测:从90%降至10%的宝藏之选
现在学校对 AIGC 的检测越来越严格,降低 AI 率成了毕业季最让人抓狂的问题。我当初写论文的时候也踩了大坑,AI 率直接飙到 80% 多,改得我头发都快掉没了。熬夜一遍遍地调整语句,结果 AI 率没降下来,查重率反而越改越高…...