Rosbag 制作 TUM数据集
Rosbag 制作 TUM数据集
一、创建rgb和depth文件夹和txt文件
mkdir rgb
mkdir depth
touch rgb.txt
touch depth.txt二、替换 bag 路径 和 topic
tum.py:
import os
import cv2
import numpy as np
import rosbag
from sensor_msgs.msg import Image
from cv_bridge import CvBridge# 定义文件路径
script_dir = os.getcwd()
rgb_path = os.path.join(script_dir, 'rgb')
depth_path = os.path.join(script_dir, 'depth')# 创建 CvBridge 实例
bridge = CvBridge()# 定义常量
DEPTH_ENCODING = '32FC1'
DEPTH_NORMALIZE_MIN = 0.0
DEPTH_NORMALIZE_MAX = 1.0
DEPTH_SCALE = 65535num = 1
rgb_width = None
rgb_height = None# 确保文件夹存在
if not os.path.exists(rgb_path):os.makedirs(rgb_path)
if not os.path.exists(depth_path):os.makedirs(depth_path)with rosbag.Bag(os.path.join(script_dir, 'image.bag'), 'r') as bag: #bag路径with open(os.path.join(script_dir, 'depth.txt'), 'w') as depth_time_file, open(os.path.join(script_dir, 'rgb.txt'), 'w') as rgb_time_file:for topic, msg, t in bag.read_messages():if topic == "/camera/depth/image_raw": #depth topiccv_image = bridge.imgmsg_to_cv2(msg, desired_encoding=DEPTH_ENCODING)# 将深度图像范围归一化到0-1之间cv_image_normalized = cv2.normalize(cv_image, None, DEPTH_NORMALIZE_MIN, DEPTH_NORMALIZE_MAX, cv2.NORM_MINMAX)# 获取深度图像尺寸depth_height, depth_width = cv_image_normalized.shapeif rgb_width is not None and rgb_height is not None:# 调整深度图像尺寸为与彩色图像相同cv_image_normalized = cv2.resize(cv_image_normalized, (rgb_width, rgb_height), interpolation=cv2.INTER_LINEAR)# 将深度图像范围扩展到0-65535并转换为16位无符号整数(CV_16U)cv_image_mono16 = (cv_image_normalized * DEPTH_SCALE).astype(np.uint16)# 保存深度图像image_name = str(num) + '.png'cv2.imwrite(os.path.join(depth_path, image_name), cv_image_mono16)# 写入深度图像的时间戳timestr = "%.8f" % msg.header.stamp.to_sec()depth_time_file.write(timestr + " depth/" + image_name + "\n")if topic == "/camera/rgb/image_raw": #rgb topiccv_image = bridge.imgmsg_to_cv2(msg, "bgr8")rgb_height, rgb_width, _ = cv_image.shape# 进行深度图像几何校正和对齐操作,使其与彩色图像对齐# 保存彩色图像image_name = str(num) + '.png'cv2.imwrite(os.path.join(rgb_path, image_name), cv_image)# 写入彩色图像的时间戳timestr = "%.8f" % msg.header.stamp.to_sec()rgb_time_file.write(timestr + " rgb/" + image_name + "\n")num += 1三、开始转换
1.生成图片和txt
python tum.py2.使用官方脚本得到associate.txt文件
python3 associate.py rgb.txt depth.txt > associate.txt
相关文章:

Rosbag 制作 TUM数据集
Rosbag 制作 TUM数据集 一、创建rgb和depth文件夹和txt文件 mkdir rgb mkdir depth touch rgb.txt touch depth.txt 二、替换 bag 路径 和 topic tum.py: import os import cv2 import numpy as np import rosbag from sensor_msgs.msg import Image from cv_b…...

本地websocket服务端暴露至公网访问【cpolar内网穿透】
本地websocket服务端暴露至公网访问【cpolar内网穿透】 文章目录 本地websocket服务端暴露至公网访问【cpolar内网穿透】1. Java 服务端demo环境2. 在pom文件引入第三包封装的netty框架maven坐标3. 创建服务端,以接口模式调用,方便外部调用4. 启动服务,出现以下信息表示启动成功…...

男UI设计师主要是做什么的优漫教育
1、根据各种相关软件的用户群,提出构思新颖、有高度吸引力的创意设计; 2、对页面进行优化,使用户操作更趋于人性化; 3、维护现有的应用产品; 4、收集和分析用户对于GUI的需求。 二、需要学什么…...
超实用!Spring Boot 常用注解详解与应用场景
目录 一、Web MVC 开发时,对于三层的类注解 1.1 Controller 1.2 Service 1.3 Repository 1.4 Component 二、依赖注入的注解 2.1 Autowired 2.2 Resource 2.3 Resource 与 Autowired 的区别 2.3.1 实例讲解 2.4 Value 2.5 Data 三、Web 常用的注解 3.1…...
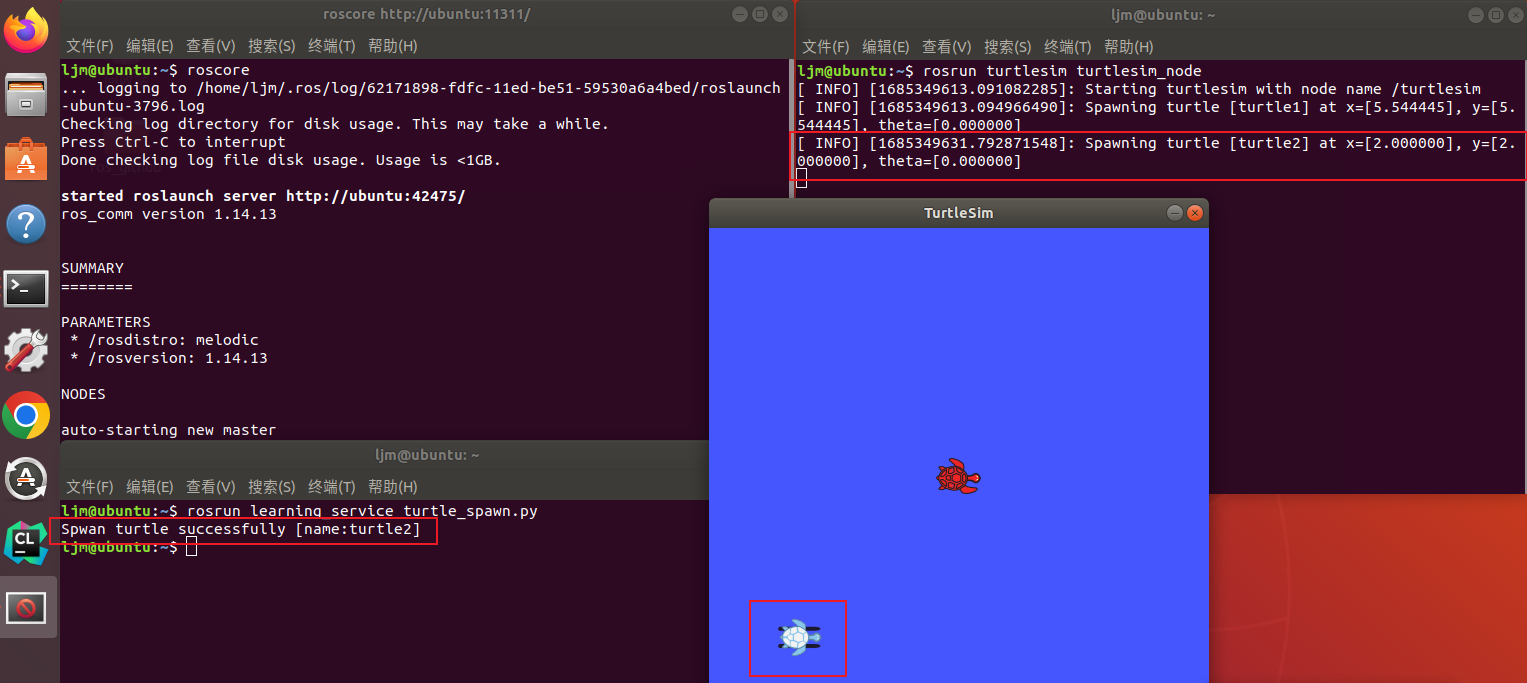
【古月居《ros入门21讲》学习笔记】11_客户端Client的编程实现
目录 说明: 1. 服务模型 2. 实现过程(C) 创建功能包 创建客户端代码(C) 配置客户端代码编译规则 编译 运行 3. 实现过程(Python) 创建客户端代码(Python) 运行…...

小程序和Vue写法的区别主要有什么不同
1.语法不同:小程序使用的是WXML、WXSS和JS,而Vue使用的是HTML、CSS和JSX。 2.数据绑定方式不同:小程序使用的是双向数据绑定,而Vue使用的是单向数据流。 1)在小程序中需要使用e.currentTarget.dataset.*的方式获取&…...

Flutter之MQTT使用
1.添加依赖: 首先,需要在Flutter项目的pubspec.yaml文件中添加mqtt_client依赖。 dependencies:#https://pub.dev/packages/mqtt_clientmqtt_client: ^10.0.02.创建MQTT客户端并连接到MQTT服务器:2.创建一个MQTT客户端实例来进行连接和通信 Fu…...

vr红色教育虚拟展馆全景制作提升单位品牌形象
720全景展馆编辑平台以其独特的优势,为展览行业带来了革命性的变革。这种创新的技术应用为参展商提供了更高效、更便捷、更全面的展示解决方案,进一步提升了展览行业的水平和影响力。 一、提升展示效果,增强品牌形象 720全景展馆编辑平台通过…...
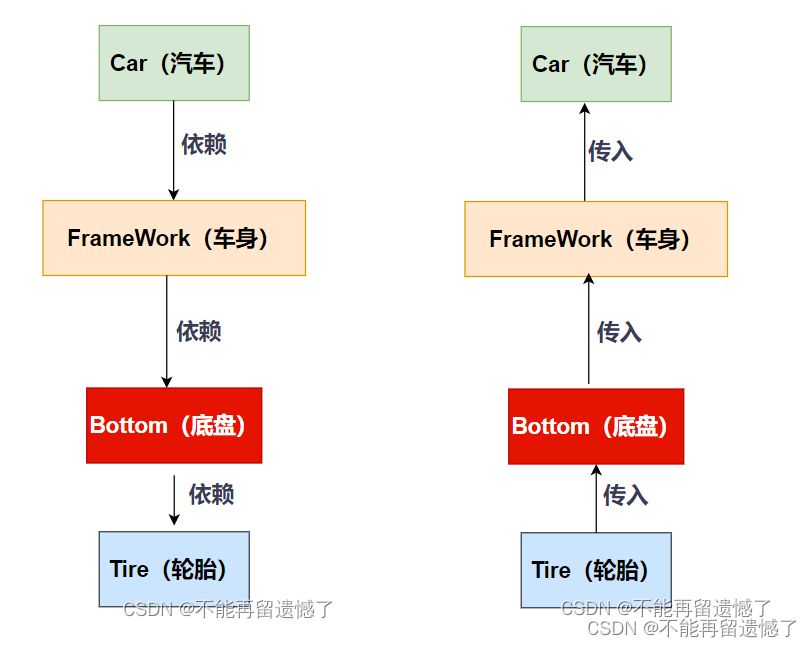
【Spring】Spring是什么?
文章目录 前言什么是Spring什么是容器什么是 IoC传统程序开发控制反转式程序开发理解Spring IoCDI Spring帮助网站 前言 前面我们学习了 servlet 的相关知识,但是呢?使用 servlet 进行网站的开发步骤还是比较麻烦的,而我们本身程序员就属于是…...

事件循环机制及常见面试题
借鉴: 《Javascript 忍者秘籍》第二版,事件循环篇 面试 | JS 事件循环 event loop 经典面试题含答案 - 知乎 (zhihu.com) 概念 主栈队列就是一个宏任务,每一个宏任务执行完就会执行宏任务中的微任务,直到微任务全部都执行完&a…...

智能监控平台/视频共享融合系统EasyCVR接入RTSP协议视频流无法播放原因是什么?
视频集中存储/云存储/视频监控管理平台EasyCVR能在复杂的网络环境中,将分散的各类视频资源进行统一汇聚、整合、集中管理,实现视频资源的鉴权管理、按需调阅、全网分发、智能分析等。AI智能/大数据视频分析EasyCVR平台已经广泛应用在工地、工厂、园区、楼…...

c# statusStrip 显示电脑主机名、IP地址、MAC地址
控件: ToolStripStatusLabel 主机名: Dns.GetHostName() IP地址: Dns.GetHostAddresses(Dns.GetHostName())[0].ToString() 当前程序的版本: Assembly.GetExecutingAssembly().GetName().Version.ToString() 获取系统版本 …...

Cesium.CustomShader颜色值显示错误
官方示例: Cesium Sandcastle 测试过程: 1、修改示例,把customshader中的fragmentShaderText替换为如下代码 void fragmentMain(FragmentInput fsInput, inout czm_modelMaterial material) {//注意:下述颜色的b值是0.1&#x…...
)
XSLVGL2.0 User Manual 页面管理器(v2.0)
XSLVGL2.0 开发手册 XSLVGL2.0 User Manual 页面管理器 1、概述2、特性3、APIs3.1、xs_page_init3.2、xs_page_wait_inited3.3、xs_page_exit3.4、xs_page_acquire3.5、xs_page_release3.6、xs_page_set_bootlogo3.7、xs_page_setup_clear_finish3.8、xs_page_setup_is_finish…...
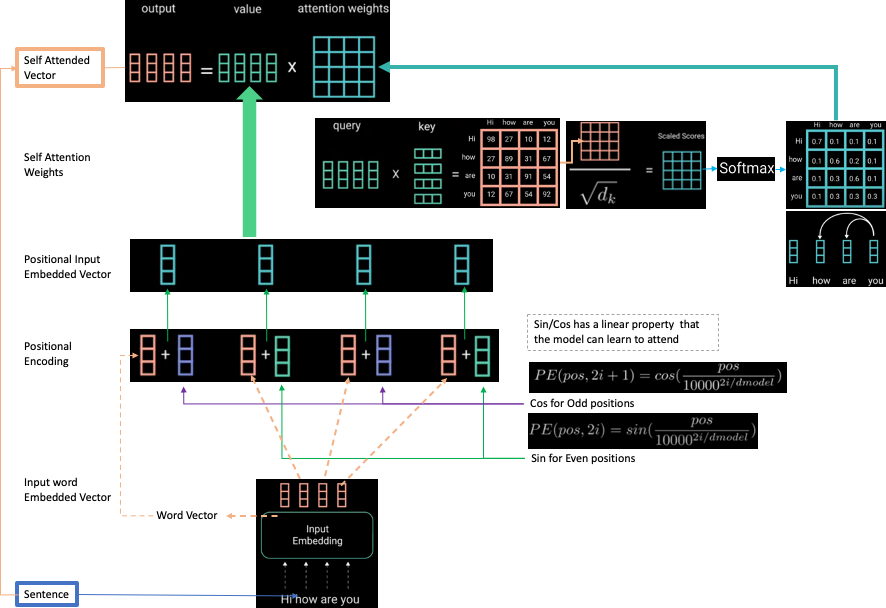
论文学习-Attention Is All You Need
Attention Is All You Need 目前暂时不会用到,大概了解一下即可。 Recurrent model 序列化的计算方式,难以并行,随着序列的增长,以前的记忆会逐渐丢失。而Attention机制可以观察到句子中所有的信息,不受距离影响&…...

Springboot 使用 RabbitMq 延迟插件 实现订单到期未支付取消订单、设置提醒消息
示例业务场景: 场景1:客户下单后,15分钟内未支付取消订单! 场景2:客户下单支付成功后,5分钟内商家未处理订单,需要推送一条消息提醒商家。如依旧未处理,则需要每隔2分钟消息提醒一下…...
)
Linux安装Tesseract-OCR(操作系统CentOS)
Linux安装Tesseract-OCR 第一步,安装依赖第二步,下载安装包第三步,安装leptonica库第四步,安装tesseract第五步,添加语言包第六步,测试 第一步,安装依赖 sudo yum install libpng-devel rpm -q…...

pair和typedef
文章目录 一、pair用法1.2、pair的创建和初始化1.3、pair对象的操作1.4、(make_pair)生成新的pair对象1.5、通过tie获取pair元素值 2、typedef2.1、什么是typedef2.2、typedef用法2.2.1、对于数据类型使用例如:2.2.2、对于指针的使用例如2.2.3、对于结构体的使用 2.…...
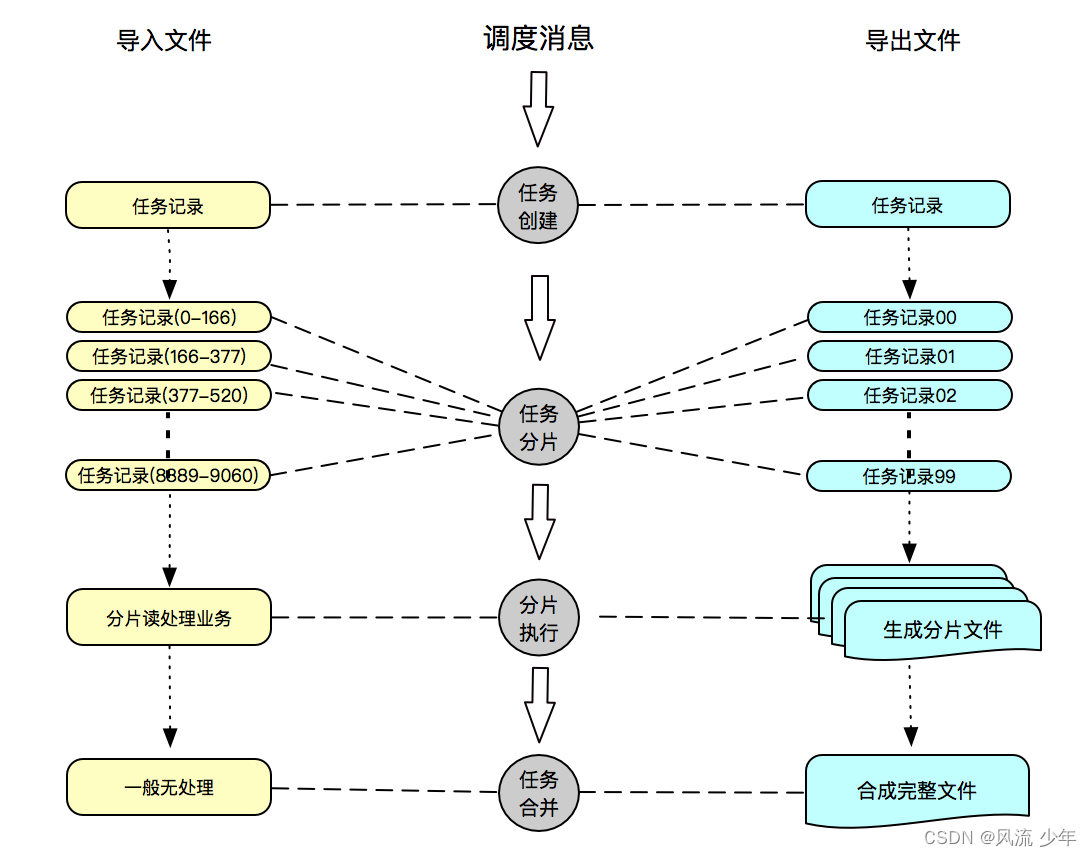
rdf-file:分布式环境下的文件处理
一:简介 数据量大了以后,单机解析或者生成文件的效率就很低,需要通过集群处理: 机构过来的文件:我们先对文件进行分片,在利用集群集群处理分片文件。给机构文件:分库分表数据,每个…...
Maven下载与安装教程
一、下载 Maven 进入 Maven 官网:maven.apache.org/download.cgi 选择 .zip 文件下载,最新版本是 3.9.5 二、安装 Maven 将 .zip 文件解压到没有中文没有空格的路径下。例如下图,在创建一个repository的空文件夹在他的下面,用于…...

AI写作辅助平台8款AI写作辅助软件梯队榜,毕业护航!
论文选题毫无头绪,文献检索耗时费力,格式排版反复修改? 查重率居高不下,写作思路始终不畅,时间紧迫却无从下手? 面对繁杂的学术任务,你是否也感到力不从心? 别担心!AI论文…...

C++学习笔记26:static 静态成员
目录 一、为什么需要静态成员? 二、静态成员变量 三、静态成员变量需要类外定义 四、用静态成员变量统计对象个数 五、静态成员变量不占对象空间 六、静态成员函数 七、静态成员函数没有 this 指针 八、静态成员函数可以访问静态成员 九、调用方式 1. 通过…...

Wireshark实战识别与防御ARP欺骗攻击
1. 为什么ARP欺骗不是“黑客电影”里的特效,而是你每天都在裸奔的真实风险 很多人第一次听说ARP欺骗,是在某部电影里看到主角敲几行命令,对面电脑就突然断网、弹出奇怪窗口、甚至开始自动转账——然后心里一紧:“这玩意儿真能这么…...

League-Toolkit:英雄联盟玩家的智能自动化助手终极指南
League-Toolkit:英雄联盟玩家的智能自动化助手终极指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 还在为繁琐的游戏操作而烦恼…...

初次在Taotoken模型广场切换不同模型进行文本生成的体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 初次在Taotoken模型广场切换不同模型进行文本生成的体验 作为一名开发者,初次接触大模型聚合平台时,最关心…...

集成学习驱动的智能黑盒测试:基于模型分歧的用例生成方法
1. 项目概述与核心价值在软件开发的漫长周期里,测试环节始终是保障质量、控制风险的关键闸口。然而,无论是手动编写测试用例,还是依赖传统的自动化脚本,都面临着效率瓶颈和覆盖度不足的挑战。尤其是在面对复杂的黑盒系统时&#x…...

C#实现与欧姆龙PLC通信的示例代码
C#实现与欧姆龙PLC通信,整合了FINS-TCP协议实现和主流开发框架: 一、通信方案选型对比 协议类型适用场景开发复杂度推荐库FINS-TCP欧姆龙设备专用通信中等HslCommunicationModbus TCP多品牌设备通用通信高NModbus4OPC UA跨平台工业物联网集成高OPC Foun…...

RAG增强检索在AIGC工作流中的实战:从文档解析到向量召回全流程
系列导读 你现在看到的是《从0到1构建AIGC工作流自动化平台:架构、实践与运维全指南》的第 3/10 篇,当前这篇会重点解决:让读者掌握RAG从理论到代码的完整落地流程,并学会在工作流中优雅复用。 上一篇回顾:第 2 篇《搭建你的第一个AIGC工作流:基于LangChain实现多步链式…...

OBS高级计时器插件完整指南:6种计时模式让直播时间管理更专业
OBS高级计时器插件完整指南:6种计时模式让直播时间管理更专业 【免费下载链接】obs-advanced-timer 项目地址: https://gitcode.com/gh_mirrors/ob/obs-advanced-timer 还在为直播时手忙脚乱地看时间而烦恼吗?OBS高级计时器插件是专为直播主设计…...

JVM调优实战:从频繁Full GC到毫秒级响应的真实踩坑记录
前言 去年双十一大促前,我们的订单系统突然开始出现间歇性卡顿。起初以为是数据库慢查询,直到看了GC日志才发现问题远比想象中复杂。这篇文章记录的是我们从一个频繁Full GC、停顿时间超过3秒的系统,优化到平均停顿小于50ms的完整过程。 真…...